非道路車輛全向電動底盤四輪差速轉(zhuǎn)向模型
2015-10-12 02:18:38朱振華呂瓊瑩王一凡丁洪韜
長春理工大學(xué)學(xué)報(自然科學(xué)版) 2015年5期
關(guān)鍵詞:模型
朱振華,呂瓊瑩,王一凡,丁洪韜
(1.長春理工大學(xué) 機電工程學(xué)院,長春 130022;2.中國科學(xué)院長春光學(xué)精密機械與物理研究所,長春 130022;3.愛荷華大學(xué),愛荷華州 52240)
非道路車輛全向電動底盤四輪差速轉(zhuǎn)向模型
朱振華1,呂瓊瑩1,王一凡2,丁洪韜3
(1.長春理工大學(xué)機電工程學(xué)院,長春130022;2.中國科學(xué)院長春光學(xué)精密機械與物理研究所,長春130022;3.愛荷華大學(xué),愛荷華州52240)
提出的全向電動底盤可以實現(xiàn)四輪獨立驅(qū)動和獨立轉(zhuǎn)向。在Akermann-Jeantand兩輪轉(zhuǎn)向模型的基礎(chǔ)上,對全向電動底盤四輪差速轉(zhuǎn)向數(shù)學(xué)模型進行了研究。建立了四輪差速轉(zhuǎn)向過程中四個車輪之間的角度關(guān)系和速度關(guān)系,解決了全向電動底盤四輪差速控制過程中的關(guān)鍵問題。利用所建立的四輪差速轉(zhuǎn)向數(shù)學(xué)模型可實現(xiàn)全向電動底盤的四輪差速轉(zhuǎn)向控制。由四輪差速轉(zhuǎn)向模型可以看出,四輪差速轉(zhuǎn)向逆相控制模式可使轉(zhuǎn)彎半徑減小一半,這對于提高全向電動底盤的靈活性和操控性具有非常重要的意義。
全向電動底盤;四輪差速轉(zhuǎn)向;數(shù)學(xué)模型;轉(zhuǎn)向控制
非道路車輛也稱非道路行走式機械,如裝載機、挖掘機、叉車等。這些傳統(tǒng)的非道路車輛一般采用柴油發(fā)動機,其尾氣排放對環(huán)境造成了嚴(yán)重污染。為此開發(fā)了一種可用于非道路車輛的全向電動底盤,其總體結(jié)構(gòu)如圖1所示。
該全向電動底盤的四個車輪由四臺電動機分別驅(qū)動,可以實現(xiàn)四輪獨立驅(qū)動和獨立轉(zhuǎn)向,完全實現(xiàn)了零污染、零排放。以該全向電動底盤為基礎(chǔ),可以開發(fā)出多種形式的非道路行走機械。相對于傳統(tǒng)汽車底盤,全向電動底盤在結(jié)構(gòu)上具有很大的不同,完全取消了機械傳動和機械轉(zhuǎn)向裝置,車輛行駛過程中的差速問題不能用傳統(tǒng)的機械差速器來完成,所以研發(fā)電子差速器成為研究的重點,而研發(fā)電子差速器的關(guān)鍵是建立四輪差速轉(zhuǎn)向數(shù)學(xué)模型。

圖1 全向電動底盤總體結(jié)構(gòu)
1 全向電動底盤四輪差速轉(zhuǎn)向模型的構(gòu)建
1.1Akermann-Jeantand車輛轉(zhuǎn)向模型
全向電動底盤設(shè)計速度為30km/h,對于低速行駛的車輛,四輪差速轉(zhuǎn)向模型的基礎(chǔ)是由Ackermann和Jeantand提出的兩輪差速轉(zhuǎn)向分析模型。該分析模型的假設(shè)條件為:(1)車體是剛性的;(2)車輪為純滾動運動,不考慮輪胎的滑移和滑轉(zhuǎn)運行狀態(tài);(3)輪胎的側(cè)向變形和側(cè)向力成正比,不考慮輪胎材質(zhì)與結(jié)構(gòu)上的非線性和由于離心力使輪胎垂直載荷發(fā)生變化對輪胎產(chǎn)生的影響[1]。
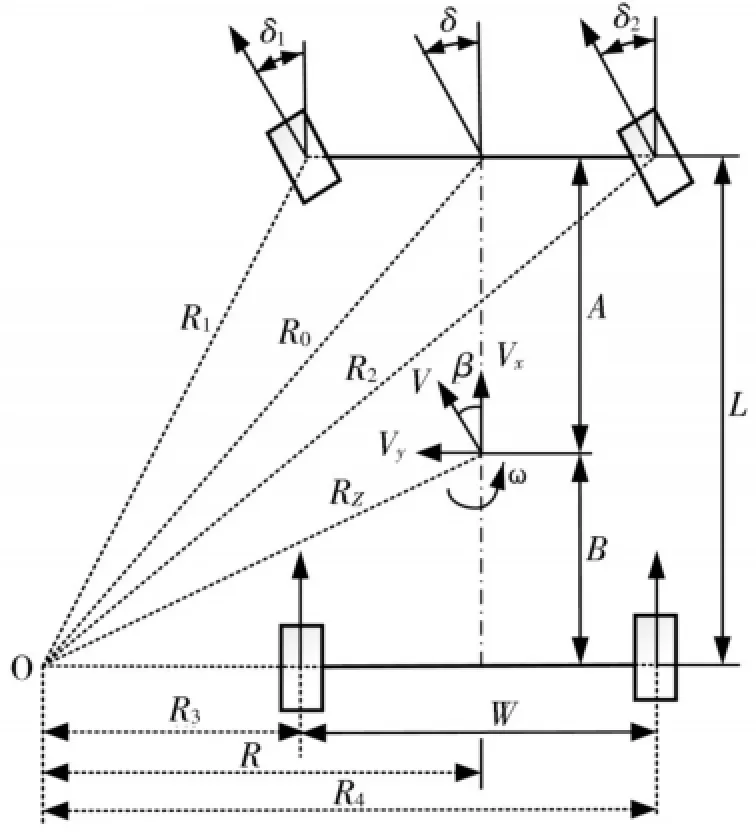
圖2 Akermann-Jeantand車輛轉(zhuǎn)向模型
圖2為Akermann-Jeantand車輛轉(zhuǎn)向模型[2]。為保證車輛轉(zhuǎn)彎時各車輪只滾動無滑動,要求四個車輪均繞同一個圓心O轉(zhuǎn)動,即每個車輪的軸線交于同一點。圖中點O即為轉(zhuǎn)動中心,車輛繞此點做圓周運動,L為前后軸的軸距,W為內(nèi)外側(cè)車輪的輪距,A和B分別為前軸和后軸到車輛質(zhì)心的距離,R1~R4分別為各個車輪繞轉(zhuǎn)中心O的轉(zhuǎn)向半徑,R0為前軸中點繞旋轉(zhuǎn)中心O的轉(zhuǎn)向半徑,RZ為車輛質(zhì)心繞旋轉(zhuǎn)中心O的轉(zhuǎn)向半徑,R是O點到后軸中點的距離。V為瞬心處的運動速度,V1~V4分別為各個車輪的縱向運動速度,δ1、δ2分別為內(nèi)外轉(zhuǎn)向輪的轉(zhuǎn)角,δ為前軸中點處的阿克曼轉(zhuǎn)角。β為車輛質(zhì)心處的側(cè)偏角,ω為車輛的橫擺角速度。
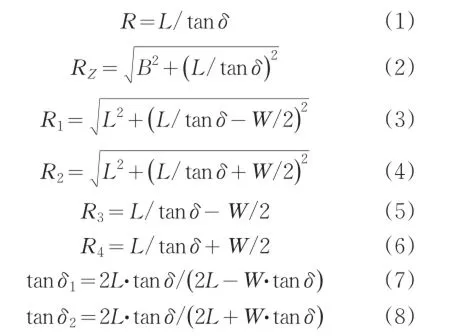
由圖2中的幾何結(jié)構(gòu)可以得到以下關(guān)系式:
由式(7)和式(8)可得:

由瞬心定理可得:
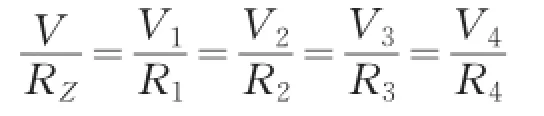
由上式可得:

把式(2)~(6)代入上式,可得各個車輪的縱向速度為:

在全向電動底盤實際轉(zhuǎn)向行駛過程中,無法測量阿克曼轉(zhuǎn)角δ,但可以測量出電動底盤左轉(zhuǎn)向輪的轉(zhuǎn)角和車速。當(dāng)電動底盤左轉(zhuǎn)向輪的轉(zhuǎn)角δ1和車速V1已知時,可由式(7)推導(dǎo)出轉(zhuǎn)角δ的計算式為:

由式(9)可得:

把式(13)和式(14)代入式(10)~式(12),即可求出各個車輪的縱向平移速度。
V1為左前輪的設(shè)定速度
把式(13)代入式(8)可得轉(zhuǎn)向時兩前輪的轉(zhuǎn)角關(guān)系:
δ1為左前輪的設(shè)定轉(zhuǎn)角

1.2全向電動底盤四輪差速轉(zhuǎn)向數(shù)學(xué)模型
對于低速轉(zhuǎn)向車輛來說,四輪差速逆相轉(zhuǎn)向可減小轉(zhuǎn)彎半徑,提高車輛轉(zhuǎn)彎的靈活性。
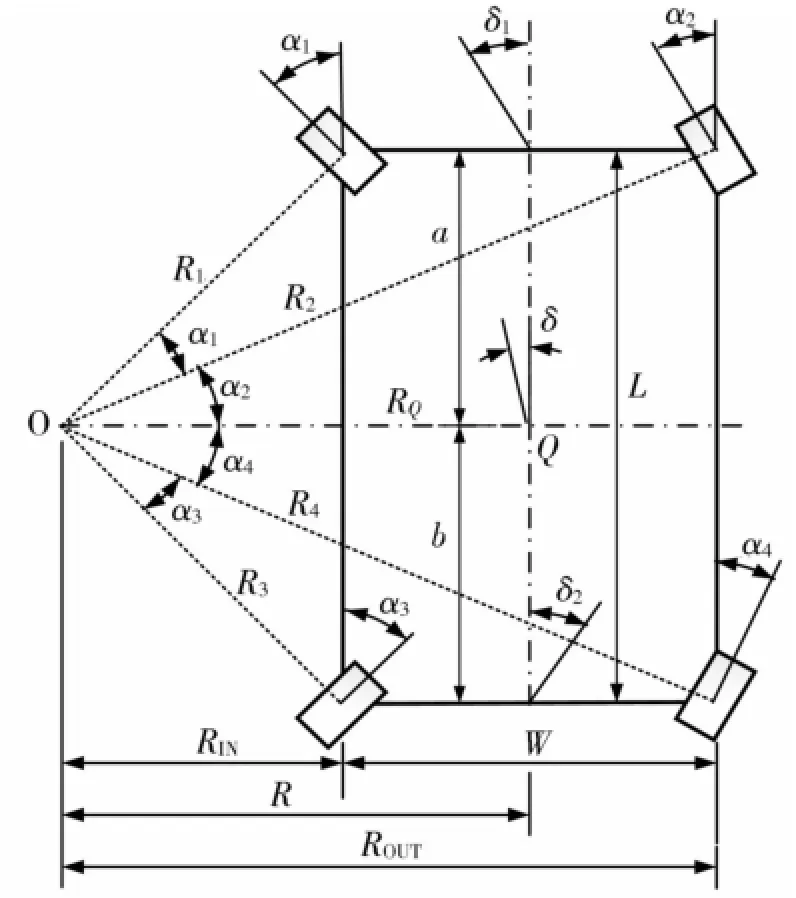
圖3 前后輪反向轉(zhuǎn)動差速轉(zhuǎn)向模型
圖3為前后輪反向轉(zhuǎn)動差速轉(zhuǎn)向模型。圖中L為前后軸的軸距,W為內(nèi)外側(cè)車輪的輪距,a和b分別為前軸和后軸到車輛質(zhì)心的距離,R1~R4分別為各個車輪繞旋轉(zhuǎn)中心O的轉(zhuǎn)向半徑,RQ為質(zhì)心Q繞旋轉(zhuǎn)中心O的轉(zhuǎn)向半徑,RIN為旋轉(zhuǎn)中心O到兩內(nèi)側(cè)車輪中心連線的距離,R為旋轉(zhuǎn)中心O到車輛左右對稱線的垂直的距離,ROUT為旋轉(zhuǎn)中心O到兩外側(cè)車輪中心連線的距離,α1~α4分別四個轉(zhuǎn)向輪的轉(zhuǎn)角,δ1和δ2分別為前軸和后軸中點處的轉(zhuǎn)角,δ為車輛質(zhì)心處的轉(zhuǎn)角[3,4]。
由圖3中的幾何關(guān)系可知:

由式(25)可得:

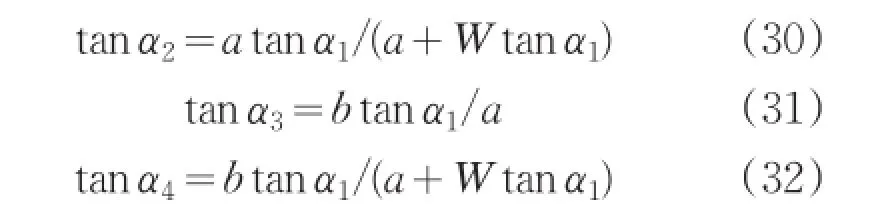
當(dāng)左前輪的轉(zhuǎn)角α1已知時,把式(24)代入式(26)~(28)可求出其他車輪的轉(zhuǎn)角。
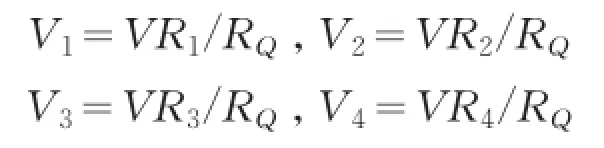
由瞬心定理可得:

式中,V為全向電動底盤質(zhì)心的速度,V1~V4分別為各個車輪的縱向運動速度。
由上式可得:
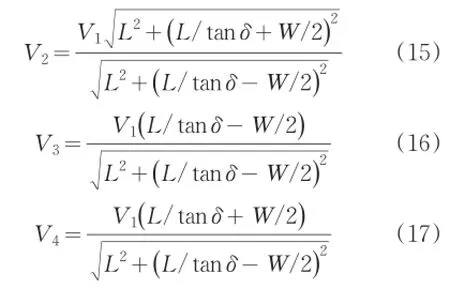
把式(20)~式(24)代入上式,可得各個車輪的縱向速度為:
當(dāng)電動底盤左轉(zhuǎn)向輪的轉(zhuǎn)角δ1和車速V1已知時,由式(33)可得:
把式(29)和式(37)代入式(34)~式(36),即可求出各個車輪的縱向平移速度:
V1為設(shè)定速度
為進一步簡化模型,假設(shè):
式中,δ為全向電動底盤前后輪軸中點處的轉(zhuǎn)向角。此時質(zhì)心Q位于小車的對稱中心,全向電動底盤在轉(zhuǎn)向過程中的瞬態(tài)圓心點處于前后輪軸的對稱中線上。把式(41)代入式(30)~(32)可得:
把式(41)代入式(38)~(40)可得:
把式(41)和式(42)代入式(19)可得:

比較式(45)與式(1)可知,與典型的前輪差速驅(qū)動Akermann-Jeantand轉(zhuǎn)向模型相比,前后輪反向轉(zhuǎn)動差速轉(zhuǎn)向模型的轉(zhuǎn)向半徑減小了一半。在式(38)~式(40)中,對于全向電動底盤來說,由于L、W、a、b為固定常數(shù),因此轉(zhuǎn)向過程中各個車輪的速度是左轉(zhuǎn)向輪的速度(V1)和轉(zhuǎn)向角度(α1)的函數(shù)。
2 四輪差速轉(zhuǎn)向數(shù)學(xué)模型的應(yīng)用
利用所建立的四輪差速轉(zhuǎn)向數(shù)學(xué)模型可實現(xiàn)全向電動底盤的四輪差速轉(zhuǎn)向控制。圖3所示為全向電動底盤總體控制結(jié)構(gòu)[5]。
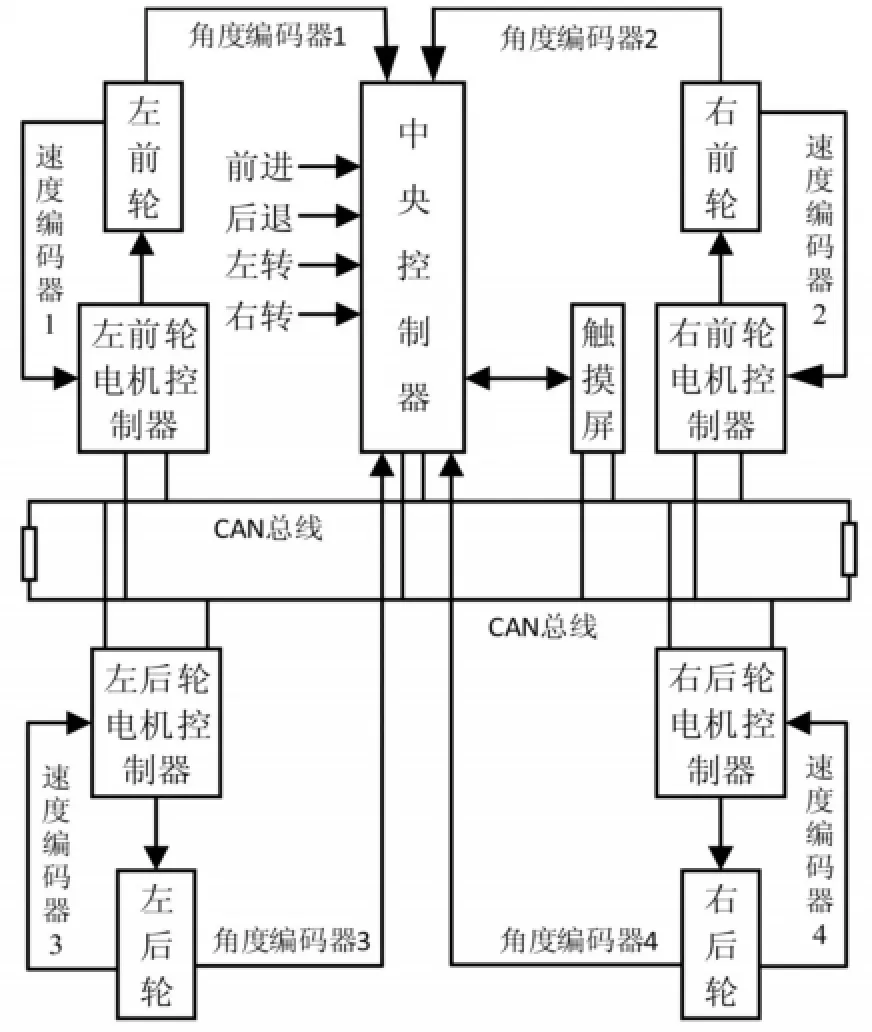
圖4 全向電動底盤總體控制結(jié)構(gòu)
四輪差速轉(zhuǎn)向控制過程如下:車輛轉(zhuǎn)彎時,中央控制器根據(jù)駕駛員給定的前輪轉(zhuǎn)彎角度信號(α1)和轉(zhuǎn)彎速度信號(V1),由控制程序根據(jù)四輪差速轉(zhuǎn)向模型公式(30)~式(32)計算出差速轉(zhuǎn)向時其他三個車輪的轉(zhuǎn)向角度α2、α3、α4;根據(jù)四輪差速轉(zhuǎn)向模型公(38)~式(40)計算出差速轉(zhuǎn)向時其他三個車輪的轉(zhuǎn)向速度V2、V3、V4。車輪速度可通過中央控制器輸出的電壓信號分別控制四個電機控制器來實現(xiàn)。轉(zhuǎn)向過程中,四個車輪的轉(zhuǎn)向速度保持不變。根據(jù)給定的前輪轉(zhuǎn)彎角度,由四輪差速轉(zhuǎn)向模型計算出各個車的目標(biāo)轉(zhuǎn)角后,由旋轉(zhuǎn)編碼器實時測量轉(zhuǎn)向過程中各個車輪的實際轉(zhuǎn)角,并與存儲在中央控制器中的目標(biāo)轉(zhuǎn)角進行比較,當(dāng)各個車輪的實際轉(zhuǎn)角與目標(biāo)轉(zhuǎn)角相等時,由中央控制器控制各個車輪停止轉(zhuǎn)動,實現(xiàn)四輪差速轉(zhuǎn)向。
3 結(jié)論
基于Akermann-Jeantand兩輪轉(zhuǎn)向模型,建立了全向電動底盤四輪差速轉(zhuǎn)向數(shù)學(xué)模型。該模型適用于四輪低速轉(zhuǎn)向工況,在該工況下當(dāng)前后輪轉(zhuǎn)角相等時,采用四輪轉(zhuǎn)向逆相控制模式可使轉(zhuǎn)彎半徑最小,與兩前輪轉(zhuǎn)向控制模式相比,轉(zhuǎn)彎半徑可減小一半。這對于低速選位停車、窄道行駛等都會帶來極大的方便。利用該模型,可實現(xiàn)全向電動底盤的四輪差速轉(zhuǎn)向控制。
[1] 靳彪,張欣,楊慶保.純電動汽車低速轉(zhuǎn)向差速控制模型[J].北京交通大學(xué)學(xué)報,2013,37(4):158-160.
[2] 袁儀,陳世元.電動汽車電子轉(zhuǎn)彎差速的解決方案綜述[J].上海汽車,2009(3):2-5.
[3] 舒進,陳思中,楊林.四輪獨立轉(zhuǎn)向系統(tǒng)控制策略與試驗[J].農(nóng)業(yè)機械學(xué)報,2005,36(7):25-28.
[4] 高拓宇.汽車驅(qū)動輪電子差速控制方法研究[D].重慶:重慶交通大學(xué),2011.
[5] 顏南明,張豫南,王和源.新型電傳動車輛驅(qū)動控制系統(tǒng)設(shè)計[J].兵工學(xué)報,2012,33(2):232-236.
Four Wheel Differential Steering Model for Omnidirectional Electric Chassis Applied in Off-road Vehicles
ZHU Zhenhua1,LV Qiongying1,WANG Yifan2,DING Hongtao3
(1.School of Mechatronical Engineering,Changchun University of Science and Technology,Changchun 130022;2.Changchun Institute of Optics,F(xiàn)ine Mechanics and Physics,Chinese Academy of Sciences,Changchun 130022;3.the University of Iowa,Iowa City 52240)
Omnidirectional electric chassis has such functions as four wheel independent driving and steering.In the basis of Akermann-Jeantand’s two wheel steering model,four wheel differential steeringmathematical model for omnidirectional electric chassis is studied.The relationships of angle and speed among the four wheels are established which solves the key issues in the process of differential steering control for four wheels.By use of the four wheel differential steering mathematical model,the differential steering control for four wheels of omnidirectional electric chassis can be realized.It is obviously that the four wheel differential and inverse phase steering mode can make the turning radius reduce by half,which is very important to improve the flexibility and controllability of omnidirectional electric chassis.
omnidirectional electric chassis;four wheel differential steering;mathematical model
U273
A
1672-9870(2015)05-0048-05
2015-05-18
吉林省科技廳資助項目(20140204064GX)
朱振華(1970-),男,副教授,E-mail:zhuzhenhua0431@163.com
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19