雙基高比線面陣結合立體測繪幾何模型的構建
2015-10-11 02:22:14李瀛搏胡斌胡海彥方勇傅丹膺
航天返回與遙感 2015年1期
李瀛搏 胡斌 胡海彥 方勇 傅丹膺
(1 北京空間機電研究所,北京 100094)
(2 西安測繪研究所,西安 710054)
(3 航天東方紅衛星有限公司,北京 100094)
0 引言
航天立體測繪衛星系統作為航天對地觀測系統的重要組成部分,用于獲取全球范圍目標的精確地理信息數據,為國家基礎地理信息系統的建設、維護和更新提供數據源,滿足國家基礎測繪、國土資源調查以及國民經濟建設等各個方面的需求[1-2]。
大比例尺航天立體測繪主要用于全球范圍重點目標區域地表三維信息獲取,主要任務是實現城市等重點目標及其設施和相關區域地物目標的三維結構重建,目標特點是建筑物密集、高度起伏變化劇烈[3],采用傳統的大基高比攝影測量模式存在以下3個方面的難題:
1)由于地表高程的劇烈變化造成地物之間相互遮擋,需要多視角觀測,在有限的觀測條件下,容易造成有效信息的缺失。
2)由于大基高比測繪采用大交會角觀測,造成立體像對之間幾何和輻射差異非常大,影響了同名像點的匹配精度,同時三維信息重建自動化程度較低。
3)比例尺越大,對地物要素信息的表達越詳細、影像分辨率越高、幾何精度越高,因此,對光學測繪衛星系統的綜合性能提出了更高的要求,體積和質量明顯增加,系統設計和研制的難度也會顯著增大[4]。
因此,本文提出了基于雙基高比線面陣結合的立體測繪方法。采用大、小基高比的雙基高比立體測繪相機可以實現大基高比交會成像和小基高比近同時成像的綜合成像模式,兼顧了平緩地形測繪和地表陡峭地物三維測繪要求,可以降低建筑物遮擋帶來的問題,有利于提高影像匹配精度和自動化處理程度,在城市大比例尺立體測繪中有更多優勢。同時,由于面陣探測器具有較好的幾何保真度,線陣加入面陣形成線面陣聯合相機系統后,立體定位的可靠度和精度將得到明顯提高,兼顧了正射影像等測繪產品的制作,有利于實現無地面控制點高精度全球測繪[5]。
本文以共線條件方程為基礎,從理論上分析面陣相機和線陣相機的成像機制,建立雙基高比線面陣結合立體測繪的傳感器嚴格幾何成像模型,并基于仿真影像進行雙基高比線面陣結合定位精度分析,驗證成像模型的正確性,可為我國實現1︰5 000比例尺甚高精度航天立體測繪提供一種新思路和解決途徑。
1 線面陣聯合成像模型的構建
嚴格成像模型是以共線方程為基礎,通過不同坐標系之間轉換,嚴格描述像點的空間坐標與相應地面點的數學關系。因此,根據傳感器成像幾何特性的不同,所對應的嚴格成像模型也有所不同。
1.1 面陣相機嚴格成像模型
面陣影像的成像過程為面中心投影,每景影像僅有一個投影中心[6]。影像覆蓋范圍內的地面點通過投影中心(像主點S)進入傳感器內部,在像平面上形成影像。
基于中心投影原理,像點和物點的向量關系如圖1所示,共線方程為

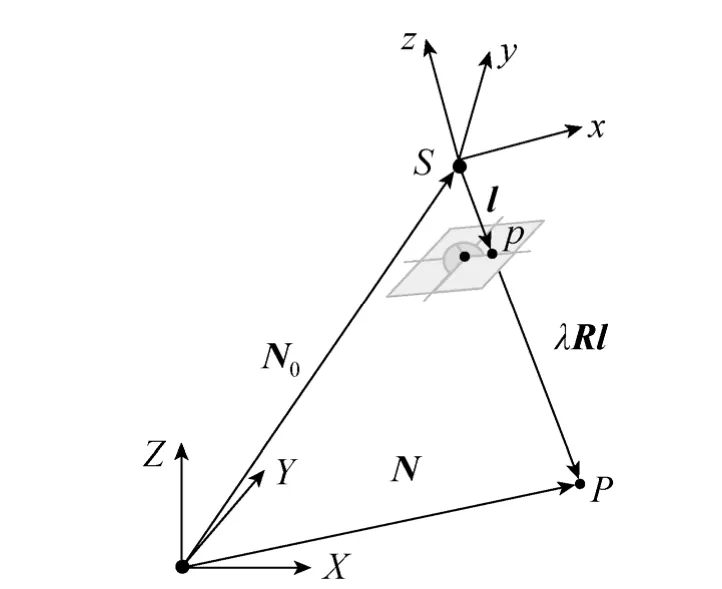
圖1 共線方程向量式Fig.1 Vector diagram of collinearity equation
地面點 P (X,Y,Z)和像點 p (x,y,z)以及投影中心S三點共線,根據共線條件方程,則面陣影像的嚴格模型為
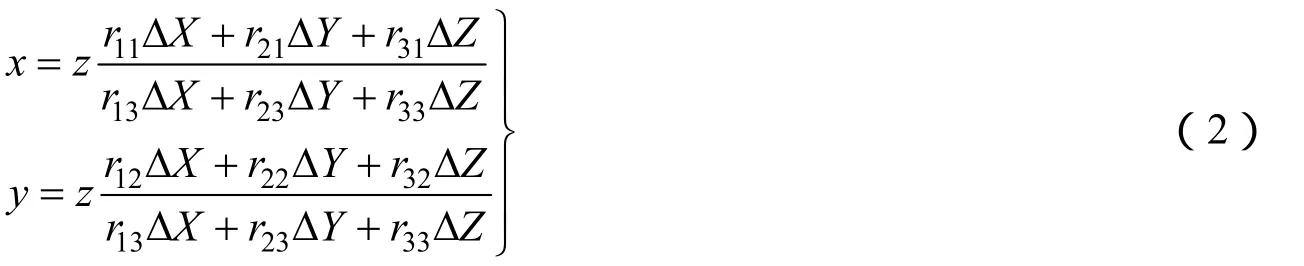
考慮到系統誤差,上式擴展為

為考慮到系統誤差的數學模型,系統誤差數學模型和這些附加參數是根據相機系統誤差的實際物理幾何特性來確定的,對于復雜的系統誤差也可采用高階多項式來描述,附加參數的有效性需要實際的試驗和數據平差處理來確定。共線方程的一般式可表示為

式中 ω、φ、κ為像空間坐標系(相機坐標系)和物方空間坐標系的旋轉變換角;xp、yp、c為相機內方位元素;xF、yF為考慮系統誤差的共線方程一般表達式。
1.2 線陣相機嚴格成像模型
與面陣相機的成像方式不同,線陣影像是由一系列垂直于軌道方向的線陣 CCD傳感器通過推掃的方式獲取的,通過衛星沿軌飛行,獲得所攝地區的連續航帶影像。因此,一幅影像上像點坐標對應的外方位元素并不唯一,每一掃描行圖像與被攝物體之間存在著中心投影關系,都對應獨立的一套外方位元素
1.2.1 線中心投影共線方程模型
對于單個像點,線陣相機和地面點的數學關系為
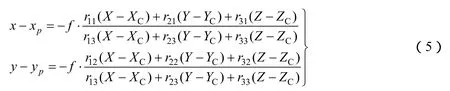
式中 (XC,YC,ZC)為投影中心在地面坐標系統中的坐標;f為相機焦距。
對于光學系統由多個鏡頭組成的傳感器,對上述模型需要改化,引入附加參數以描述其他鏡頭相對于正視鏡頭的位置與姿態關系。例如,對于鏡頭j(j=1, 2, 3, …, n),以dxj、dyj、dzj為相對于正視鏡頭的相對位置,αj、βj、γj為相對于正視鏡頭的相對姿態,如圖2所示,圖中fj、xpj、ypj為鏡頭j的焦距和主點坐標[7-10],PCj、xCj、yCj、zCj為相機j的像空間坐標,則公式擴展為

即
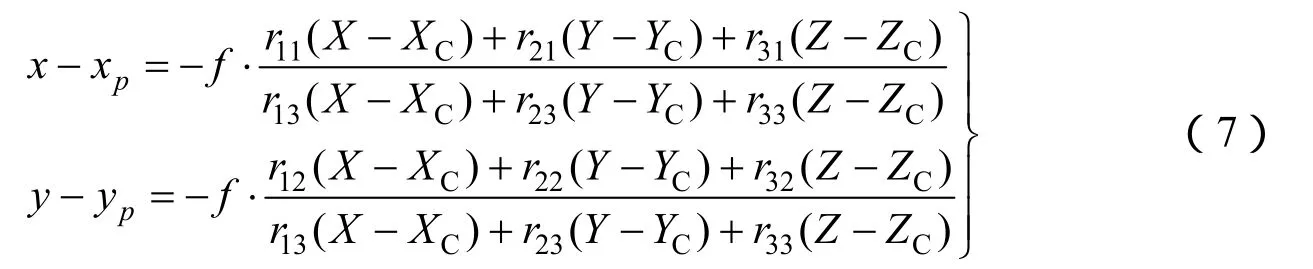

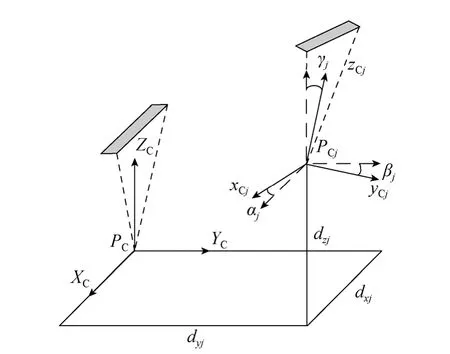
圖2 相機j與正視鏡頭的幾何位置相對關系Fig.2 Positional relationship between camera j and nadir camera
考慮到相機自檢校,上述模型可進一步擴展為

式中 Δxj和Δyj為關于鏡頭畸變、CCD線陣畸變以及內定向參數(改正量)等成像系統的系統誤差模型。
1.2.2 線陣相機軌道模型
傳感器外部定向模型(EO)用關于時間的分段多項式(PPM)來建模[11]。可以通過衛星飛行軌道的特性設置多項式階數,根據控制點(GCPs)和連接點(TPs)的分布來確定多項式的分段個數,分段多項式軌道模型如圖3所示。
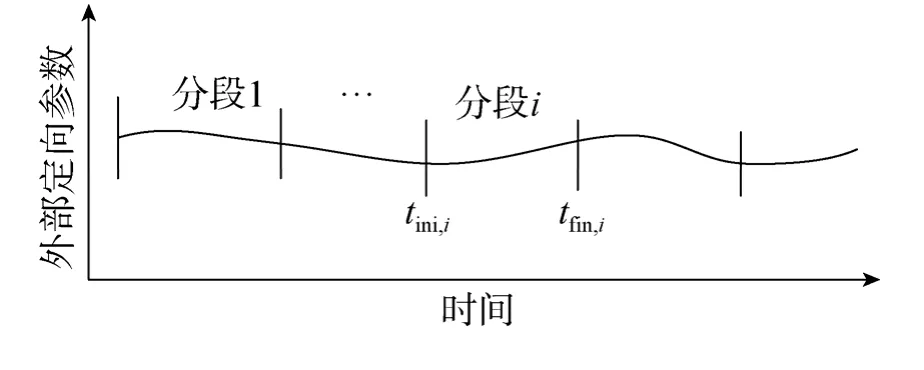
圖3 分段多項式軌道模型Fig.3 Orbit model of sectioned polynomial
對于被分割軌道的第i段(該段的首末端點的線陣影像獲取時刻記為),則定義時間變量t為

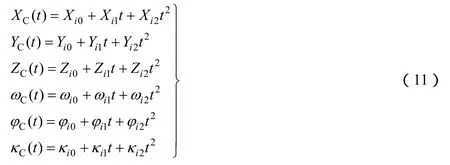
式中0t為該段軌道上某線陣影像的獲取時刻。以2階多項式為例(時間t為因變量),則在分段多項式的每一段,傳感器外部定向參數模型為
1.3 附加參數模型
為了提高模型對傳感器的物理描述真實度,需要對基本的共線方程進行擴展,以期達到精細化建模的目的。具體做法是對共線方程引入附加參數,這些附加參數在平差處理過程同時予以求解。附加參數必須滿足3個要求:1)所有新引入的參數必須與已存在的平差中的待估參數無關;2)如果引入的附加參數模型為多項式,多項式階數不宜過高;3)還需要使用統計方法對引入的參數進行顯著性檢驗,以確定各個附加參數對整個模型貢獻的顯著性。
根據附加參數是否具有實際的物理意義,可以將像差改進模型分為顧及像點特性的系統誤差改正模型和多項式誤差改正模型兩大類。測繪相機系統誤差的一般表達式為

像差改進模型是關于像空間坐標的函數,利用相機自身物理參數或正交化參數來予以描述,最終反映理想的像空間坐標和實際的像點坐標之間的差異。
顧及像點特性的這類系統誤差模型是從實際的物理、幾何特性出發來描述和刻畫盡可能與實際相機相符的系統誤差數學模型。
通過分析測繪衛星系統的誤差源,可以將上式展開為

式中 Δxi、Δyi為內定向參數誤差(主點、主距);Δxr、Δyr為鏡頭的徑向畸變;Δxd、Δyd為鏡頭的偏心畸變;Δxf、Δyf為成像面內誤差(像元尺寸均勻度、陣列正交性);Δxu、Δyu為成像面誤差(像面平整度)。
由于線陣相機與面陣相機在系統組成上的區別,其附加參數也不相同。線陣相機通常采用多個線陣傳感器拼接來獲得足夠的成像幅寬,因此,需要對多個線陣傳感器之間的直線度誤差和拼接精度進行分析和建模。
1.4 線面陣聯合成像模型
混合型的線面陣相機組合,從數學模型上來講,是將線陣、面陣不同傳感器模型及其成像模式結合在一起,在數據平差處理時,其觀測方程組的建立,系數矩陣的構造等與前兩者存在一定的差異,這是線面陣相機的數據平差處理的“組合”,其本質是“多源數據聯合平差空中三角測量”問題[12-13]。
對于如圖4所示的線面陣結合相機系統,如果地面點A分別成像在線陣影像及面陣影像上,則面陣相機成像模型、線陣相機成像模型組成聯立方程組。
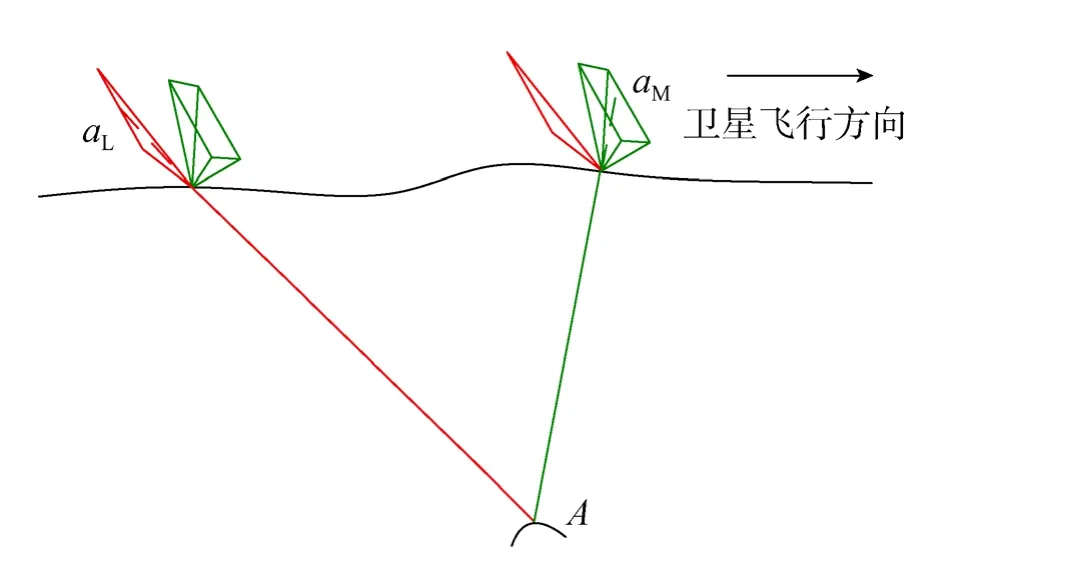
圖4 雙基高比線面陣結合相機系統立體定位示意(以一個線陣和一個面陣為例)Fig.4 Double baseline stereo photogrammetric mode(one linear array sensor and one area array sensor)
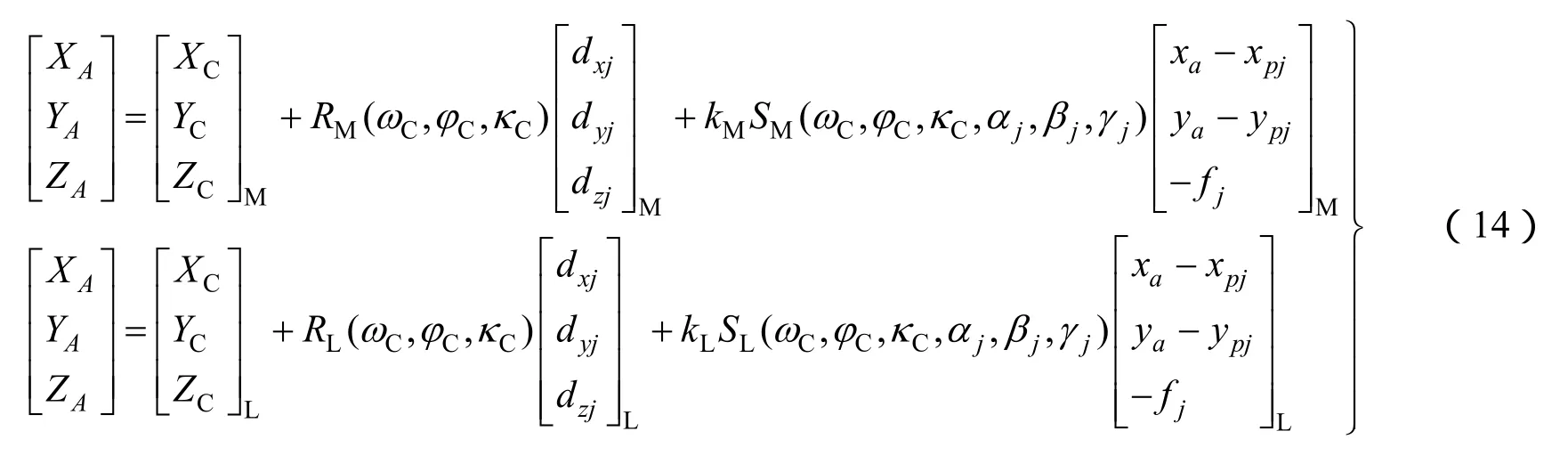
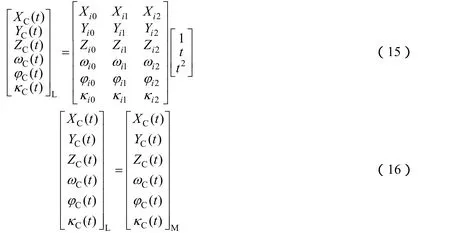
式中 下標M、L分別為面陣相機和線陣相機。式(16)為線(面)陣相機攝影時刻約束方程,由于線陣相機與面陣相機安裝在同一衛星平臺上,因此,在同一攝影時刻 t,線陣相機與面陣相機具有相同的外方位元素。
式(14)聯立的條件是線面陣相機對同一物點A在不同攝影時刻進行攝影成像,需要注意線陣相機影像tax坐標與時間t等價。如果面陣相機能夠形成連續立體模型(連續航向重疊)或單張影像覆蓋3個以上控制點,則可由面陣相機的攝影航帶進行區域網平差或單片后交,從而計算得到面陣相機在某些攝影時刻的外方位元素,而且這些攝影時刻需要正確記錄,進而利用式(16)進行線(面)陣相機攝影時刻約束。由于式(14)為非線性系統,需要采用牛頓迭代法平差求解,線性化后對于攝影區域的多個控制點及對應的多個面陣影像及線陣條帶影像,會有如下線性化后的觀測方程組:

式中 H為未知數向量;E為系數矩陣;L為觀測量;v為觀測量改正數。
其中
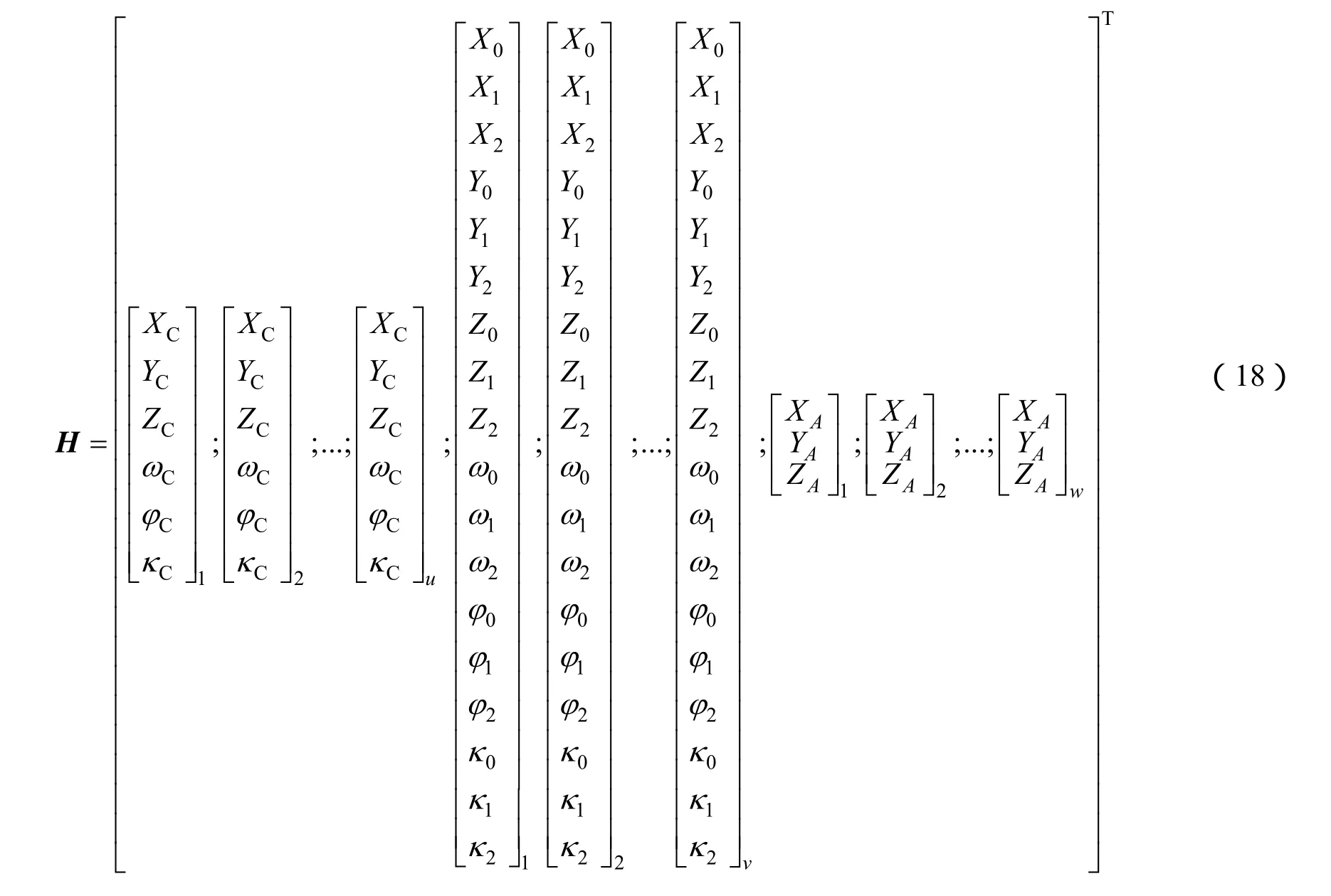
式(18)中,未知數H可以分為3類:1)面陣相機外方位元素(u為面陣相機鏡頭數);2)線陣相機軌道模型參數(v為線陣相機鏡頭數);3)物點物方坐標(w為物點數)。至此,平差精度(內部精度)的評估可按最小二乘技術中的相關內容進行;外部精度(檢查精度)按RMS計算而得。
通過理論建模,本文提出了雙基高比線面陣結合立體測繪嚴格幾何模型,既可以解決線陣、面陣不同類型傳感器結合的測繪數據處理和高精度定位問題,也可以解決大、小基高比不同探測模式的數據處理和平差解算。
2 基于仿真影像的雙基高比線面陣結合定位精度分析
2.1 仿真場景建立
本文利用 SE-Workbench軟件實現遙感器成像仿真過程中三維場景的構建,利用軟件仿真模擬大、小基高比條件下光學遙感器的立體成像過程[14-15],采用高精度亞像素視差相關匹配處理方法處理過程,從仿真分析的角度驗證小基高比和雙基高比立體測繪的可行性,對雙基高比線面陣結合的立體測繪成像模式進行研究。
試驗采用的仿真場景如圖5所示,場景包含三維控制點21個,具有不同高度的城市建筑12組。影像分辨率為 0.3m。基于該場景,對五種成像模式進行對比分析,分別為小基高比 0.05兩面陣相機成像模式、大基高比雙線陣兩相機聯合成像模式(基高比0.6)、大小基高比兩線陣一面陣三相機聯合成像模式、大小基高比四相機聯合聯合成像模式和線面陣兩相機聯合成像模式進行了定位精度分析。從仿真途徑驗證雙基高比線面陣結合立體測繪嚴格幾何模型的正確性,分析不同測繪模式相對于傳統測繪方法的優勢。

圖5 控制場的控制點與檢查點點位分布情況Fig.5 The distribution of controls points and check points in control field
2.2 小基高比0.05面陣試驗結果
小基高比 0.05兩面陣相機成像模式的立體定位精度結果如表 1所示,對應的像點量測精度為 1/20像元。

表1 基高比0.05面陣相機立體定位檢查點精度統計(像點量測精度1/20像元)Tab.1 Stereo positioning accuracy of baseline 0.05 area array camera (matching in sub-pixel precisions)
為了進行不同像點量測精度對定位精度的影響研究,以高精度像點匹配為基礎(像點量測精度約1/20像元),加入高斯白噪聲,形成了量測精度在1/20~1/2像元范圍的6組不同的像點數據,并進行定位實驗檢查點的三維定位精度見表2。
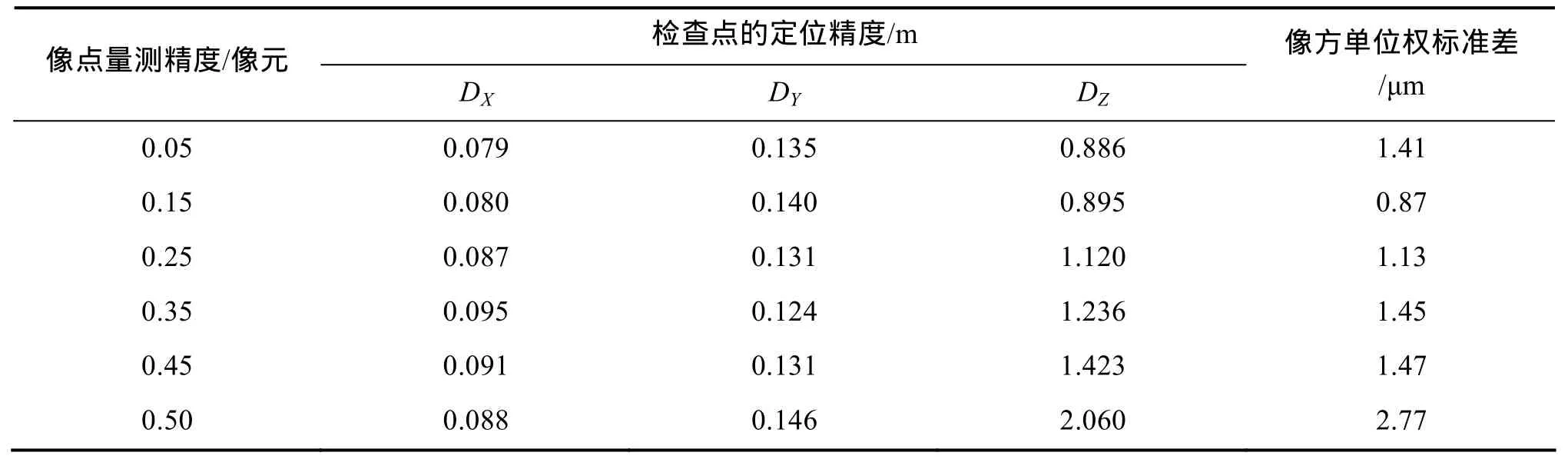
表2 不同像點匹配精度下基高比0.05面陣相機立體定位檢查點精度統計Tab. 2 Stereo positioning accuracy of baseline 0.05 area array camera(different matching precisions)
從圖6可以看出,采用本文提出的嚴格幾何模型進行小基高比解算,在匹配精度為1/20像元條件下,高程精度為0.886m。在基高比為0.05的條件下,隨著像對匹配精度的提高(1/20~1/2像元),導致視差精度的提高,高程精度明顯提高,但匹配精度的提高和高程精度的提高不是正比關系,匹配精度提高10倍,高程精度提高約1倍。該仿真試驗證明了嚴格幾何模型可以滿足小基高比條件下的數據處理和目標三維定位。

圖6 不同像點量測(匹配)精度下基高比0.05面陣相機立體定位檢查點精度統計Fig.6 Stereo positioning accuracy of baseline 0.05 area array camera in different matching precisions
2.3 大小基高比線面陣結合相機方案優選
本文分析了4種不同的大小基高比線面陣結合成像方案,具體相機形式如圖7所示。
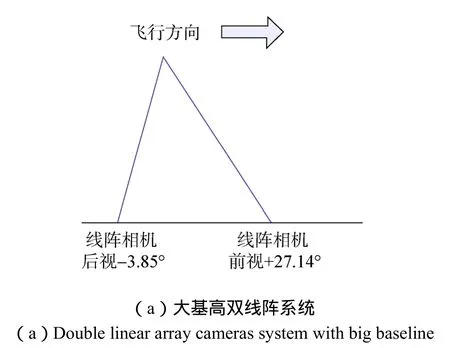
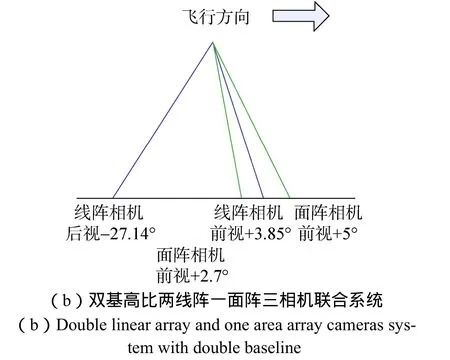
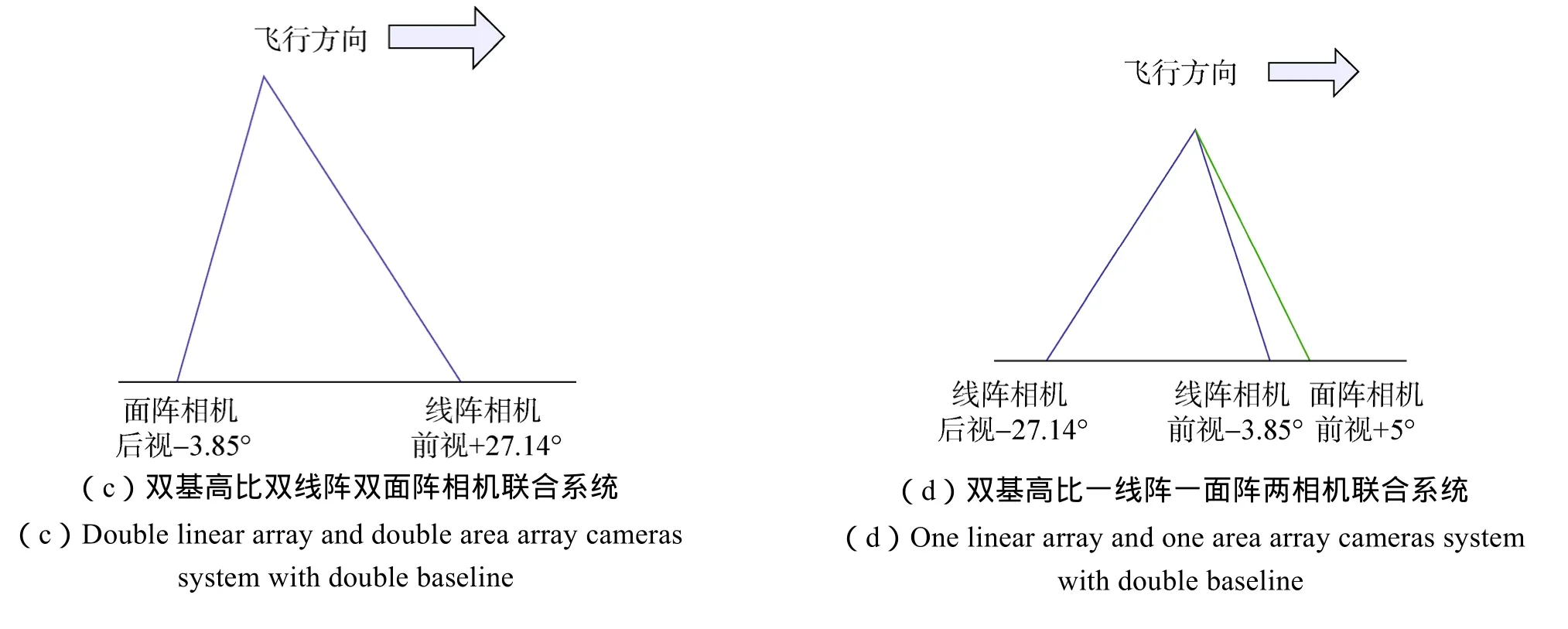
圖7 4種大小基高比線面陣成像方案Fig.7 Diagram of four imaging plans of double baseline photogrammetry
仿真結果得到4種大小基高比線面陣成像方案定位精度結果,如圖8所示。可以看出,單/雙線陣相機引入同等幅寬單/雙面陣,定位精度明顯提升,且定位精度相當;而單線陣引入等幅寬單面陣相機(基高比0.6),相機系統形式相對而言最為簡單,因此,一線陣一面陣兩相機聯合具有較明顯的優勢。
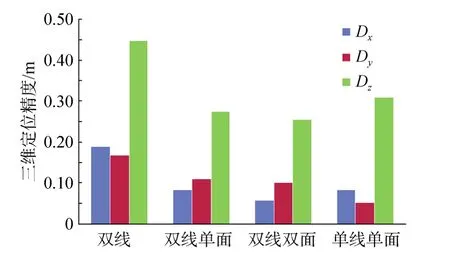
圖8 4種線面陣方案定位精度比較Fig.8 Comparison of four imaging plans of double baseline photogrammetry
3 結束語
本文以共線方程的嚴密成像理論為基礎,將面陣中心投影共線方程和適用于線陣列影像的擴展共線方程進行整合,提出了雙基高比線面陣結合測繪方法,分析了系統誤差補償方法,建立了考慮系統誤差的聯合嚴格幾何成像模型,完成了基于仿真影像的雙基高比線面陣結合定位精度分析,初步研究表明:
1)引入等幅寬面陣聯合平差,可提高線陣影像的內部精度。
2)相比雙線陣相機,立體定位的精度和解算的可靠度明顯提高。采用亞像素高精度量測算法可進一步提高定位精度。
3)雙基高比線面陣相機可有效避免遮擋和死區對立體測繪的影響,對城市地區高大建筑物具有更好的量測性能,在提升定位精度的同時,兼顧了面陣正射影像等測繪產品的制作。
4)單線陣相機引入同等幅寬單面陣(0.6基高比)的測繪模式,可以作為未來甚高精度測繪的有效解決途徑之一。
5)通過仿真分析驗證了雙基高比線面陣結合立體測繪的傳感器嚴格幾何成像模型的正確性,該模型既可以解決線陣、面陣不同類型傳感器結合的測繪數據處理和高精度定位問題,也可以解決大、小基高比不同探測模式的數據處理和平差解算,為甚高精度航天測繪應用提供理論依據。
References)
[1]唐新明, 謝俊峰, 張過. 測繪衛星技術總體發展和現狀[J]. 航天返回與遙感, 2012, 33(3): 17-24.TANG Xinming, XIE Junfeng, ZHANG Guo. Development and Status of Mapping Satellite Technology[J]. Spacecraft Recovery amp; Remote Sensing, 2012, 33(3): 17-24. (in Chinese)
[2]王任享. 中國無地面控制點攝影測量衛星追述(二)——1:1萬傳輸型攝影測量衛星技術思考[J]. 航天返回與遙感,2014, 35(2): 1-5.WANG Renxiang. Chinese Photogrammetry Satellite without Ground Control Points(2)——Technical Thinking of 1:10 000 Scale Data-transferring Photogrammetry Satellite[J]. Spacecraft Recovery amp; Remote Sensing, 2014, 35(2): 1-5.(in Chinese)
[3]方勇, 李瀛搏. 高分辨率大面陣相機航天測繪應用立體探測模式分析[J]. 測繪科學技術學報, 2011, 28(4): 235-240.FANG Yong, LI Yingbo. Application Modes Analysis of High Resolution Large Plane Array Digital Camera in Space Photogrammetry[J]. Journal of Geomatics Science and Technology, 2011, 28(4): 235-240. (in Chinese)
[4]張月, 胡斌, 阮寧娟. 雙基高比立體測繪相機熱分析與熱設計[J]. 紅外與激光工程, 2013, 42(12): 3270-3276.ZHANG Yue, HU Bin, RUAN Ningjuan. Thermal Design of Stereopsis Camera with Double Baseline[J]. Infrared and Laser Engineering, 2013, 42(12): 3270-3276. (in Chinese)
[5]李瀛搏, 傅丹膺, 李博. 甚高精度空間立體測繪體制技術途徑研究[C]. 第19屆中國遙感大會. 西安: 中國宇航學會,2014.LI Yingbo, FU Danying, LI Bo. Research on the Technical Approach for Space Stereo-mapping System with Very High Accuracy[C]. 19th Conference on Remote Sensing of China. Xi’an: Chinese Society of Astronautics, 2014. (in Chinese)
[6]王之卓. 攝影測量原理[M]. 武漢: 武漢大學出版社, 2007.WANG Zhizhuo. Principles of Photogrammetry[M]. Wuhan: Wuhan University Press, 2007. (in Chinese)
[7]李德仁, 王密. “資源三號”衛星在軌幾何定標及精度評估[J]. 航天返回與遙感, 2012, 33(3): 1-6.LI Deren, WANG Mi. On-orbit Geometric Calibration and Accuracy Assessment of ZY-3[J]. Spacecraft Recovery amp;Remote Sensing, 2012, 33(3): 1-6. (in Chinese)
[8]閆利, 姜蕓, 王軍. 利用視線向量的資源三號衛星影像嚴格幾何處理模型[J]. 武漢大學學報, 2013, 38(12): 1451-1455.YAN Li, JIANG Yun, WANG Jun. Building of Rigorous Geometric Processing Model Based on Line-of-sight Vector of ZY-3 Imagery[J]. Geometrics and Information Science of Wuhan University, 2013, 38(12): 1451-1455. (in Chinese)
[9]王任享. 三線陣CCD影像衛星攝影測量原理[M]. 北京: 測繪出版社, 2006.WANG Renxiang. Satellite Photogrammetry Principle for Three-line-array CCD Images[M]. Beijing: Surveying and Mapping Press, 2006. (in Chinese)
[10]余俊鵬, 高衛軍, 孫世君, 等. 三線陣相機體系定向模型研究[J]. 航天返回與遙感, 2013, 34(1): 44-51.YU Junpeng, GAO Weijun, SUN Shijun, etal. Research of Orientation Model of Three-linear-array Camera System[J].Spacecraft Recovery amp; Remote Sensing, 2013, 34(1): 44-51. (in Chinese)
[11]Light D L. Characteristics of Remote Sensors for Mapping and Earth Science Applications[J]. Photogrammetric Engineering amp; Remote Sensing, 1990, 56(12): 1613-1623.
[12]李然. 多源遙感影像的聯合平差[D]. 武漢: 武漢大學, 2012.LI Ran. Combined Adjustment of Multi-source Remote Sensing Imagery[D]. Wuhan: Wuhan University, 2012. (in Chinese)
[13]Raggam J, Almer A. Mathematical Aspects of Multi-sensor Stereo Mapping[C]. IGARSS’ 90, Washington D. C.
[14]Julie D, Bernard R. Small Baseline Stereovision[J]. Journal of Mathematical Imaging and Vision, 2007, 28(3): 209-223.
[15]范大昭, 申二華, 李祿, 等. 基于相位相關的小基高比影像匹配方法[J]. 測繪科學技術學報, 2013, 30(2): 154-157.FAN Dazhao, SHEN Erhua, LI Lu, etal. Small Baseline Stereo Matching Method Based on Phase Correlation[J]. Journal of Geomatics Science and Technology, 2013, 30(2): 154-157. (in Chinese)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
江西建材(2018年4期)2018-04-10 12:37:38
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
光學精密工程(2016年6期)2016-11-07 09:07:19
衛星與網絡(2015年12期)2015-10-27 02:21:46