火星著陸器扶正展開動力學研究
2015-10-11 02:22:10王永濱姜毅丁弘戈嗣誠榮偉
航天返回與遙感 2015年1期
關鍵詞:定義
王永濱 姜毅 丁弘 戈嗣誠 榮偉
(北京空間機電研究所,北京 100094)
0 引言
火星著陸器的進入、下降、著陸(entry, decent and landing, EDL)過程是火星探測的關鍵技術之一。對目前國外已成功登陸火星的著陸器“探路者號”和“海盜號”進行分析,可發現氣囊減速比緩沖支腿具備研制成本低,姿態控制簡單,能夠適應惡劣著陸條件的優勢。因此,在火星探測初期適合采用氣囊進行減速著陸[1-2]。目前國內對于基于四面體的火星著陸緩沖氣囊已進行了系統的研究,但是對于氣囊緩沖后著陸器的展開過程研究尚未深入[3-6]。本文通過對四面體著陸器展開過程進行了深入研究,提出了一種應用于四面體火星著陸器扶正展開的方法,本研究以著陸目標面為水平面為前提,對該方法涉及的扶正展開過程動力學進行了分析計算,獲得了著陸器扶正展開的力學特性,為后續火星著陸器的設計提供了設計參考。
采用氣囊緩沖的火星著陸器著陸火星后,氣囊經多次反彈完成著陸。著陸器著陸后氣囊先放氣,隨后著陸器進行扶正展開,最后搭載的有效載荷(含火星車)開始工作。由于著陸器觸地后的姿態是隨機的,這就需要一套扶正展開系統對著陸器的姿態進行調整[7-8]。若不進行扶正動作,太陽能電池板不能順利展開,搭載在著陸器內部的火星車不能順利駛出著陸器。
如圖1所示為扶正展開示意圖,將火星著陸器設計成為一個四面體結構,著陸器4個面上各裝有一組緩沖氣囊,每組緩沖氣囊由 6個類臺球架式氣囊組成,緩沖氣囊具備全向保護功能[9-10]。圖中黑色的面為探測器基座,另外3個面為側壁,扶正展開執行器位于基座和側壁中間的位置,設計中采用3個相同的展開執行器實現各個姿態下的扶正展開功能。火星著陸器著陸后首先完成著陸器的扶正,即完成著陸器的基座觸地,之后完成另外3個側壁的展開[11]。在氣囊完成收回后,著陸器開始檢測重力的方向,采用優化的扶正展開策略對不同的著陸姿態進行處理,這些處理方法是為了使施加的翻轉力矩最小化并保護科學儀器及載荷,最終的狀態是使4個面共面,完成整個著陸過程[12-13]。
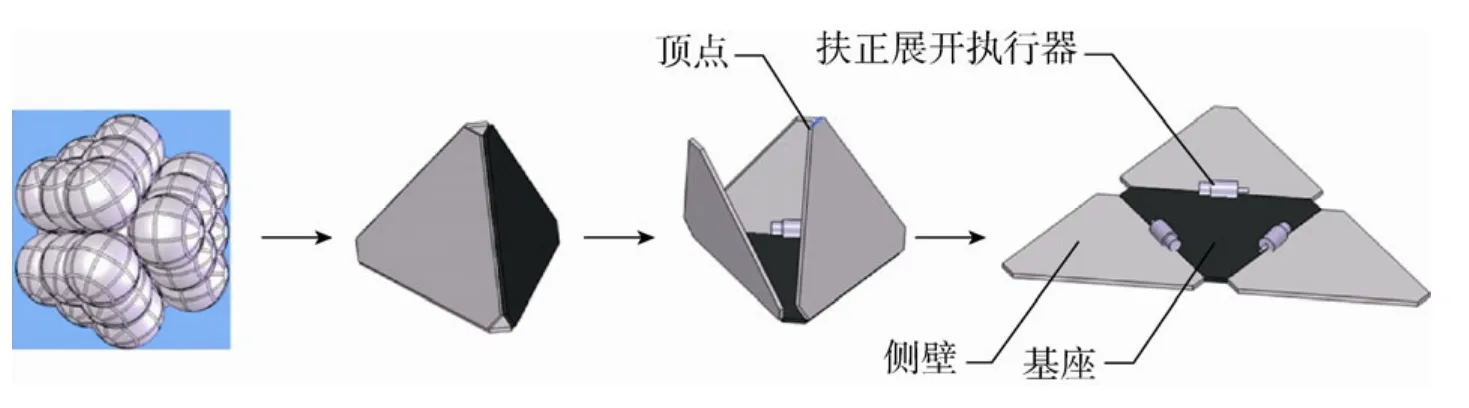
圖1 扶正展開過程示意Fig.1 Diagram of rectifying and deployment process
1 扶正展開策略設計
自扶正展開開始至整個過程結束都要采用加速度計對重力場方向進行采集。著陸器經過系列的彈跳和滾動后穩定著陸,經加速度計對重力場進行分析可以獲得以下3種穩定姿態:基座在下、側壁在下和頂點在下。
針對著陸穩定后的3種姿態,作者分別進行了分析,并提出了執行順序流程。圖2所示分別為3種姿態下的扶正展開順序流程。需要說明的是,由于著陸器包含3個側壁,著陸后3個側壁面朝下的概率相同,為了方便說明問題,在圖2中,分別以側壁2在下進行舉例說明。
2 扶正展開姿態確認
火星著陸器在著陸過程中要經歷氣囊的數次彈跳,穩定后著陸器的姿態是隨機的[14]。對于著陸器基座在下、側壁在下和頂點在下的三種初始姿態,著陸器扶正展開過程中需要對穩定后的姿態進行識別,并根據姿態采取相應的動作進行扶正和展開。
2.1 坐標系定義
圖3所示為著陸器坐標軸的定義。定義基座即面ABC的法線方向為X方向,定義3個側壁的法線方向依次為Y1,Y2,Y3。定義重力場的方向為Z向,則當X向與Z向呈0°角時,此時為理想的展開狀態。
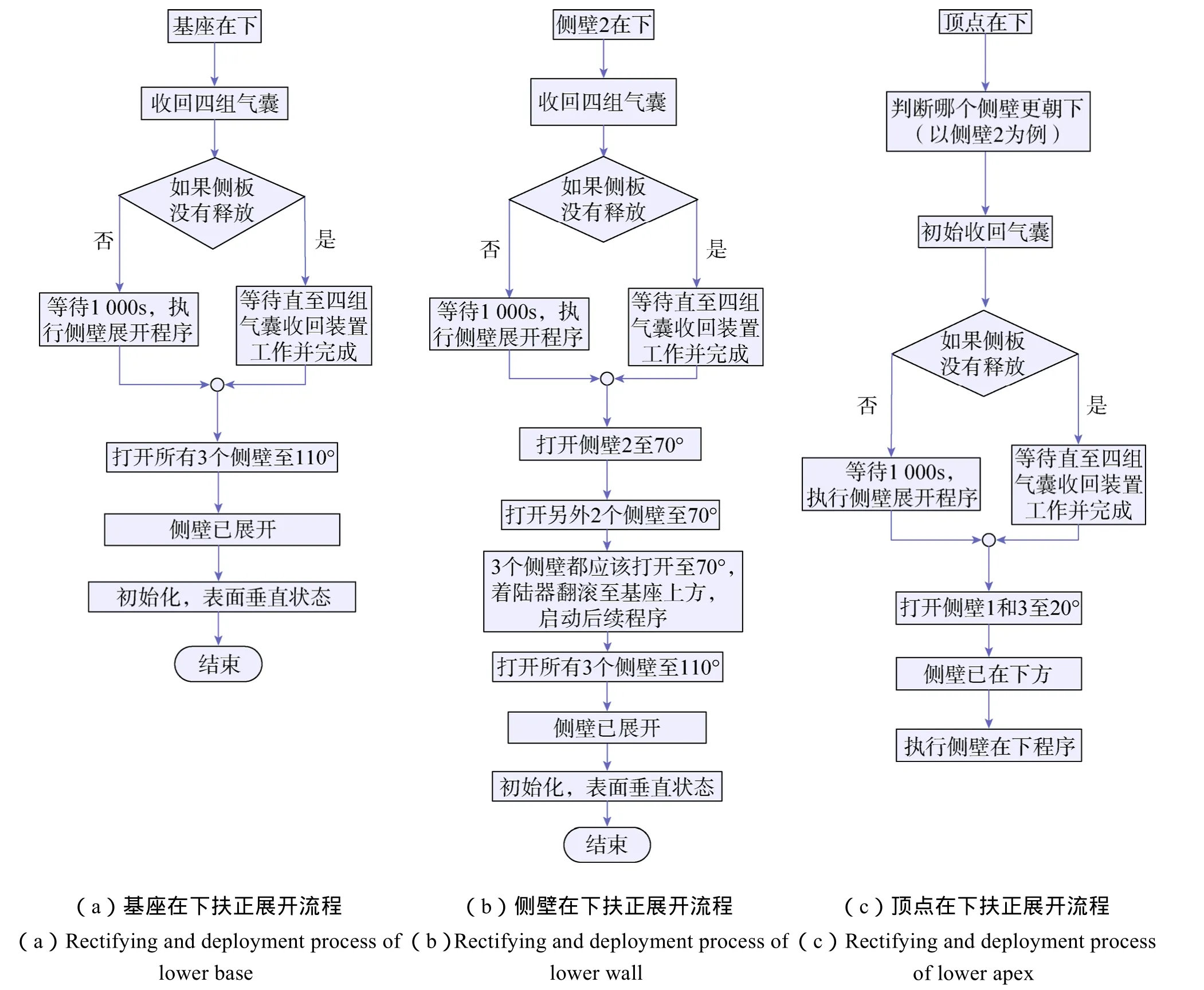
圖2 扶正展開流程Fig.2 Rectifying and deployment process
2.2 臨界翻轉角度定義
為了姿態的確定需要定義兩個翻轉臨界角度,即基座翻轉臨界角β和頂點翻轉臨界角γ。如圖4所示為β定義,著陸器即四面體ABCD繞著軸AB轉動,當著陸器由于自身的重力作用達到臨近翻轉狀態時,定義此時基座ABC翻轉的角度為β,它是在重力作用下,基座與待翻轉質量達到平衡的一個臨界角度。
由于四面體結構的著陸器并不存在一個尖的頂點,而是如圖 5所示在四面體每個頂點處存在一個小平臺DEF,DEF面朝下也是著陸器著陸穩定姿態之一。著陸器即多面體ABCDEF繞著軸EF轉動,當著陸器由于自身的重力作用達到臨界翻轉狀態時,定義此時面 BCFE翻轉的角度為γ。
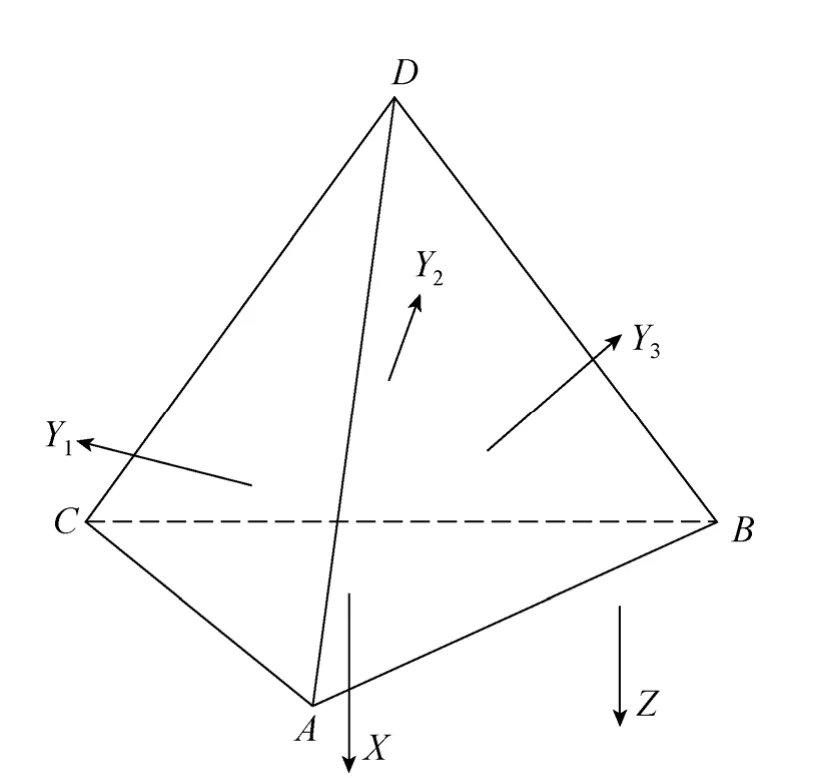
圖3 著陸器坐標定義Fig.3 Definition of coordinate for the lander
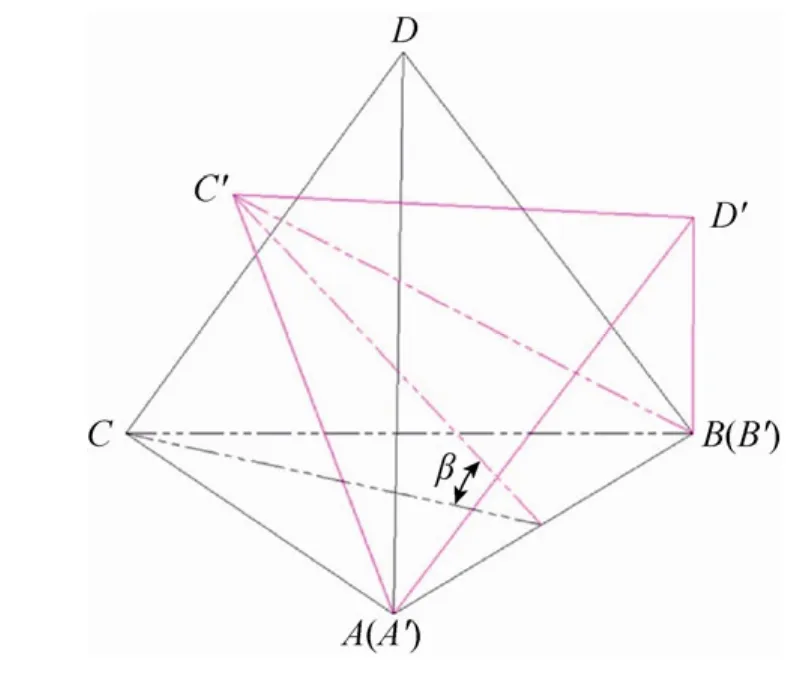
圖4 臨界角β定義Fig.4 Definition of critical angle β
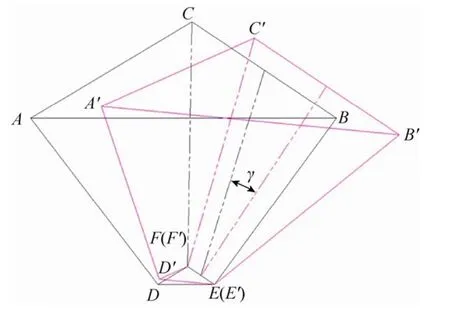
圖5 臨界角γ定義Fig.5 Definition of critical angleγ
2.3 扶正展開姿態確認
定義當基座法線方向X與重力場方向Z的夾角為0°~β時,此時為基座在下的狀態;定義基座法線方向X與重力場方向Z的夾角為β~180°–γ時,此時為側壁在下的狀態;定義基座法線方向X與重力場方向Z的夾角為180°–γ~180°時,此時為頂點在下的狀態;對于側壁在下和頂點在下的狀態,定義側壁的法線方向Y1、Y2、Y3與重力場方向Z的夾角最小的面為觸地或更加朝下的側壁。
3 扶正展開動力學分析
3.1 扶正展開動力學模型的建立
著陸器是個剛柔耦合結構,著陸器扶正展開過程中,側壁的展開過程可激起其彈性變形。故對著陸器的動力學分析需要考慮剛柔耦合的動力學分析方法。本文采用Hamilton法建立單個側壁展開的動力學方程。圖6中以中面Oxy為基準建立慣性坐標系Oxyz,坐標系Ox′y′z′為連體坐標系,方向量分別為i、j、k和i′、j′、k′。坐標系Ox′y′z′在慣性坐標系中的旋轉運動代表側壁的剛性運動;τ表示側壁相對連體坐標系的變形,初始時刻連體坐標系平面Ox′y′與未變形前的中面Oxy重合。
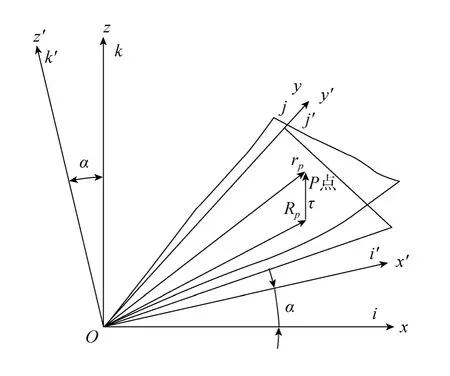
圖6 側壁展開坐標系Fig.6 Coordinate for deployment of the wall
考慮側壁彈性變形后,連體坐標系中面Ox′y′內任意點P在慣性坐標系中的位置量rp表達式:

式中 s,n,u為坐標投影;τ(s,n,u)為側壁的柔性變形;為任意點P在連體坐標系中的位置量。
利用廣義Hamilton定理的一般形式

式中 W為側壁轉動的外力功;T為動能;G為勢能;U為變形能;u1、u2為坐標投影。
由于側壁轉動設計的速度非常低(約0.025r/min),為了降低計算量,將高速轉動才起作用的非線性量和去掉[15]。不考慮側壁的彈性變形,則側壁展開過程中的定軸旋轉力矩方程 M (u)為:

式中 J為側壁的轉動慣量;α為側壁轉動的角度;m為側壁的質量;gm為火星重力加速度,t為時間。
3.2 基座在下展開動力學分析
基座在下指著陸器的承重面在下,這種姿態是最佳的一種姿態,此時不需要扶正,可以直接展開,電機以低轉矩就可以實現著陸器的展開。如圖7所示為著陸器質量分布圖。假設各壁的質量集中在各壁三角形的中心,質量分別為m1、m2、m3、m4。其中m1為基座板質量,m2、m3、m4為3個側壁板質量,另外在基座正上方的有效載荷質量為m5。著陸器邊長設定為L,m5質量點距基座為l。圖7所示為基座觸地情況,即ABC面觸地。假定各質量點質量分別為:m1=30kg,m2=10kg,m3=10kg,m4=10kg,m5=50kg,假定l=0.2m,L=1m。著陸器展開過程是使側壁轉動110°,最終使側壁觸地。
以側壁1(質量點m2所在平面)展開為例,則側壁展開過程中的定軸旋轉力矩方程1()M t為:

式中mg=3.73m/s2;ω為側壁轉動速度,ω=0.025r/min。
如圖8所示為側壁展開過程中的力矩曲線。由圖可知在前2.2min內,展開執行器克服側壁重力做功,在2.2min之后側壁由自身的重力引起側壁下降,臨界翻轉角度為19.8°。
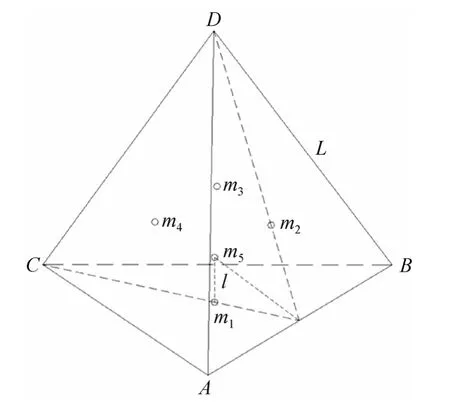
圖7 基座在下著陸器質量分布圖Fig.7 Distributing of mass for the lander of lower base

圖8 基座在下展開過程中力矩曲線Fig.8 Curve of the torque in the deployment process of lower base
3.3 側壁在下扶正展開動力學分析
側壁在下是指非承重面在下,此時需要首先進行扶正,即非承重面所在的轉動關節轉動,隨后進行著陸器的展開,電機需要較大轉矩克服著陸器的翻轉。圖9所示為側壁2觸地情況,即面ABD面觸地,基座為面ABC。扶正過程著陸器是繞著AB軸轉動,最終使ABC面觸地。實現側壁在下情況下扶正的方法是使處于基座的側壁打開70°,這樣就能保證經過側壁轉動使基座觸地。隨后打開3個側壁至110°,完成整個扶正展開的過程。
該狀態下扶正展開執行器的定軸旋轉力矩方程為:

式中 θ為質量點m3與ABC面關于轉軸AB的夾角,經計算φ為質量點m與ABC面
5關于轉軸AB的夾角,經計算
如圖10所示為側壁在下扶正過程的力矩曲線,該力矩曲線近似呈線性變化。圖中可以看出在5.7min時合力矩為0,即此時發生翻轉,臨界翻轉角度為51.3°。
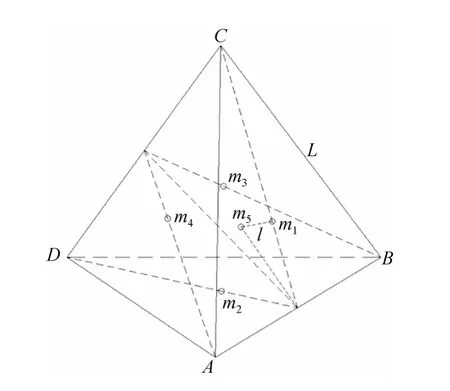
圖9 側壁在下著陸器質量分布圖Fig.9 Distributing of mass for the lander of lower wall

圖10 側壁在下扶正過程中力矩曲線Fig.10 Curve of the torque in the rectifying process of lower wall
3.4 頂點在下扶正動力學分析
著陸器落地的最小可能姿態是基座在四面體頂點的正上方平衡。這種姿態對于扶正產生了一個巨大的挑戰。此時經過加速度計的判別獲得一個更加朝下的側面,此面作為將來首先觸地的目標面。將另外兩個側壁打開20°,這時另外兩個側壁和基座形成了一個90°的夾角,并且此時這兩個側面相對基座達到了一個最高點。在這個過程中系統的重心位置將脫離穩定的狀態下的包絡區域,這樣著陸器將倒向之前的目標面,實現側壁朝下,之后啟動側壁朝下的流程實現著陸器的扶正展開。如圖11所示為頂點在下的姿態以及質量分布。設定底面平臺側壁的邊長為L′。
則扶正展開執行器的定軸旋轉力矩方程為:

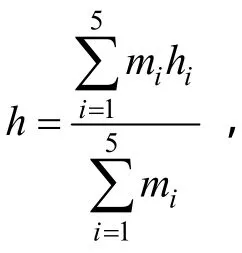
式中 h為合質量點距面DEF的高度,hi為各質量點距離面DEF的距離;L′為面DEF的邊長;ψ為合質量點關于翻轉軸線的夾角,經計算
假定L′長度為0.2m,如圖12所示為該狀態下的扶正過程的力矩曲線,圖中可以看出在0.75min時合力矩為0,即此時發生翻轉,臨界翻轉角度為6.75°。
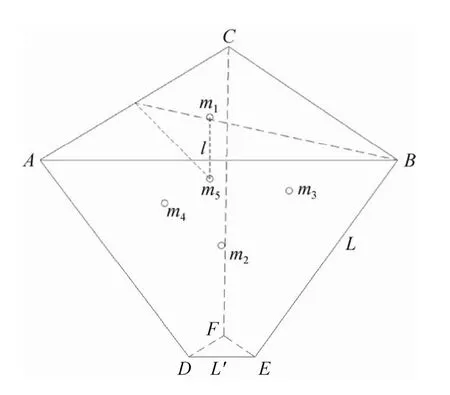
圖11 頂點在下著陸器質量分布圖Fig.11 Distributing of mass for the lander of lower acme

圖12 頂點在下扶正過程中力矩曲線Fig.12 Curve of the torque in the rectifying process of lower acme
4 結束語
本文通過對火星著陸器扶正展開動力學的研究,提出了扶正展開動作策略。首先對扶正展開的姿態進行了分析,提出了一種火星著陸器扶正展開流程和確定著陸器姿態的方法。基于Hamilton法建立了扶正展開著陸器的動力學模型,對著陸后穩定姿態下的扶正展開執行器的動力學特性進行了分析。獲得扶正展開過程的力矩特性曲線,從而可以量化翻轉過程,獲得翻轉最大力矩并為著陸器總體設計提供參考。該研究對于火星著陸器的設計具有參考意義。
References)
[1]Way D W, Powell R W. Mars Science Laboratory: Entry, Descent, and Landing System Performance[C]//2006 IEEE Aerospace Conference, USA: Big Sky, MT, 2006: 1-3.
[2]Douglas S. Mars Exploration Rover Airbag Landing Loads Testing and Analysis[C]//45thAlAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics&Materials Conference, USA: AIAA, 2004: 1-2.
[3]趙秋艷. 火星探路者的可膨脹氣囊著陸系統綜述[J]. 航天返回與遙感, 2001, 22(4): 6-8.ZHAO Qiuyan. Inflatable Airbag Landing System of Mars Pathfinder[J]. Spacecraft Recovery amp; Remote Sensing, 2001, 22(4):6-8. (in Chinese)
[4]馮強, 王生. 火星著陸緩沖氣囊沖擊過程的仿真分析[J]. 計算機仿真, 2012, 29(11): 126-127.FENG Qiang, WANG Sheng. Simulation of Attenuating Airbag Impact Dynamics for Mars Landing[J]. Computer Simulation,2012, 29(11): 126-127. (in Chinese)
[5]戈嗣誠. 火星全向氣囊的著陸緩沖特性研究[J]. 航天返回與遙感, 2012, 33(2): 17-18.GE Sicheng. Study on Cushioning Characteristic of Mars Omni-direction Airbag[J]. Spacecraft Recovery amp; Remote Sensing,2012, 33(2): 17-19. (in Chinese)
[6]戴華杰, 胡振東, 咸奎成, 等. 火星探測器氣囊緩沖系統著陸過程仿真[J]. 力學季刊, 2010, 31(4): 556-557.DAI Huajie, HU Zhendong, XIAN Kuicheng, etal. Simulation Analysis for Landing Process of A Mars Detector with Airbag Buffer System[J]. Chinese Quarterly of Mechanics, 2010, 31(4): 556-557. (in Chinese)
[7]Witkowski A, Brown G. Mars Deployable Decelerators Capability Roadmap Summary[C]//2006 IEEE Aerospace Conference,USA: Big Sky, MT, 2006.
[8]Douglas S A. Mars Exploration Rover Airbag Landing Loads Testing and Analysis[R]. AIAA 2004-1795, 2004.
[9]Donald E W, Kenneth C J, Tommaso P R. Mars Pathfinder Impact Attenuation System[R]. AIAA 95-1552-CP, 1995.
[10]Thurman S W. Return to the Red Planet: An Overview of the Mars Pathfinder Mission[R]. AIAA 95-1534-CP, 1995.
[11]Roncoli R B, Ladwinski J M. Mission Design Overview for The Mars Exploration Rover Mission[C]. AIAA/AAS Astro dynamics Specialist Conference and Exhibit, Monterey, CA, 2002: 5-8.
[12]Charles R. Landy ILC Dover Inc. Development of the Mars Pathfinder Inflatable Airbag Subsystem[R]. AIAA 97-1545, 1997.
[13]Braun R D, Manning R M. Mars Exploration Entry, Descent and Landing Challenges[C]. 2006 IEEE Aerospace Conference,Big Sky, MT, USA, 2006.
[14]Greg R G. Mars Pathfinder Lander Deployment Mechanisms[R]. CA 91109, 1995.
[15]張朋, 高海波, 鄧宗全, 等. 展開式太陽板的動力學分析[J]. 宇航學報, 2009, 30(4): 1359-1361.ZHANG Peng, GAO Haibo, DENG Zongquan, etal. Dynamic Analysis of Deployable Solar Panel[J]. Journal of Astronautics,2009, 30(4): 1359-1361. (in Chinese)
猜你喜歡
幼兒教育·父母孩子版(2022年4期)2022-05-08 21:35:35
中學生數理化(高中版.高考數學)(2021年3期)2021-06-09 06:09:14
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:38
中學生數理化(高中版.高二數學)(2021年2期)2021-03-19 08:54:04
海峽姐妹(2020年9期)2021-01-04 01:35:44
華人時刊(2020年13期)2020-09-25 08:21:32
VOGUE服飾與美容(2020年9期)2020-09-02 14:47:26
山東青年(2016年1期)2016-02-28 14:25:25
汽車維護與修理(2015年6期)2015-02-28 12:16:55
當代修辭學(2014年3期)2014-01-21 02:30:44