基于DSP的永磁同步電機伺服系統(tǒng)實驗平臺設計
2015-09-12 07:50:42李紅麗賀永利巫亞強
兵器裝備工程學報 2015年3期
李 喆,李紅麗,賀永利,巫亞強
(西北機電工程研究所,陜西 咸陽 712099)
永磁同步電機(PMSM)具有定位精度和穩(wěn)速精度高、動態(tài)響應快、運行穩(wěn)定性好以及低噪聲等優(yōu)點,通過合理設計永磁磁路結(jié)構能獲得較高的弱磁性能,提高電機的調(diào)速范圍,在火炮隨動系統(tǒng)、機器人驅(qū)動控制等高動態(tài)響應伺服控制領域得到廣泛應用[1-2]。在系統(tǒng)設計過程中,高性能永磁同步電機伺服控制系統(tǒng)實驗平臺的設計關系整個控制系統(tǒng)性能的優(yōu)劣。鑒于此,設計開發(fā)了一套基于數(shù)字信號處理器(DSP)的永磁同步電機伺服系統(tǒng)實驗平臺,在滿足工程設計需求的同時,為相關專業(yè)研究生和新員工提供專業(yè)實踐平臺。
1 永磁交流伺服系統(tǒng)控制原理
1.1 PMSM工作原理
PMSM主要由定子、轉(zhuǎn)子及測量轉(zhuǎn)子位置的傳感器構成。定子采用三相對稱繞組結(jié)構,其軸線在空間彼此相差120°,當其對稱三相繞組接通對稱三相電源后,流過繞組的電流在定轉(zhuǎn)子氣隙中建立起旋轉(zhuǎn)磁場,其轉(zhuǎn)速為ns=,式中f為電源頻率,p為定子極對數(shù),磁場旋轉(zhuǎn)方向取決于繞組電流的相序。由于電磁感應作用,閉合的轉(zhuǎn)子永磁體內(nèi)將產(chǎn)生感應電流,該電流產(chǎn)生的磁場和定子繞組產(chǎn)生的旋轉(zhuǎn)磁場相互作用產(chǎn)生電磁轉(zhuǎn)矩,從而使轉(zhuǎn)子“跟著”定子磁場旋轉(zhuǎn)起來,其轉(zhuǎn)速n與ns同步。測量轉(zhuǎn)子位置的傳感器一般為旋轉(zhuǎn)變壓器或光電編碼器。
1.2 PMSM數(shù)學模型
PMSM模型是一個多變量、非線性、強耦合系統(tǒng),為實現(xiàn)動態(tài)過程的矢量控制,運用坐標變換理論,通過對電機定子三相靜止坐標軸系的基本方程進行線性變換,實現(xiàn)電機數(shù)學模型的解耦,從而把交流電機中交流電流的控制變換成類似于直流電機中直流電流的控制,實現(xiàn)力矩控制,取得類似直流電機的高動態(tài)性能[3-5]。坐標變換如圖1,其中(A、B、C)為定子三相靜止坐標系,(α、β)為定子兩相靜止坐標系,(d、q)為轉(zhuǎn)子兩相旋轉(zhuǎn)坐標系。
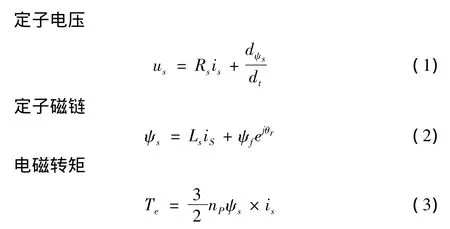
圖1中us為定子電壓,is為定子電流,ψs為定子磁鏈矢量,ψf為轉(zhuǎn)子磁鏈矢量,θr為轉(zhuǎn)子角位置,δ為電機轉(zhuǎn)矩角。

圖1 坐標變換關系
假設:①忽略電動機鐵心的飽和;②不計電動機中的渦流和磁滯損耗;③轉(zhuǎn)子無阻尼繞組。
PMSM在定子三相靜止坐標系(A、B、C)中的數(shù)學模型表達如下:
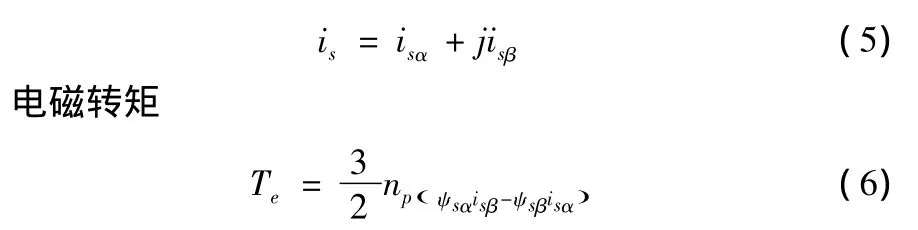
PMSM在定子兩相靜止坐標系(α、β)中的數(shù)學模型表達如下:

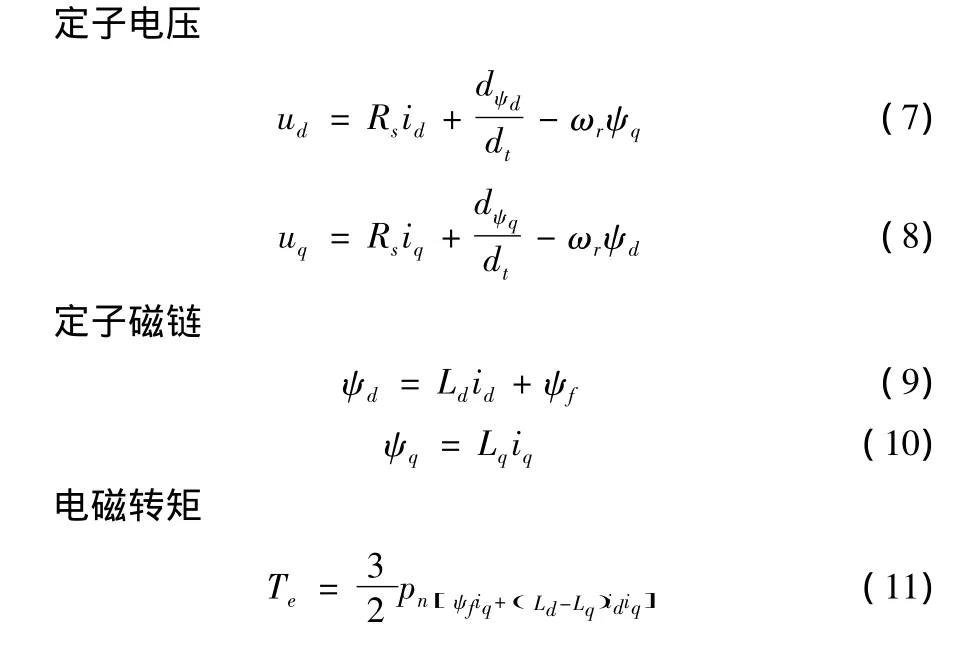
PMSM在轉(zhuǎn)子旋轉(zhuǎn)坐標系(d、q)中的數(shù)學模型表達如下:
1.3 PMSM控制原理
永磁同步電機控制系統(tǒng)通過位置檢測單元檢測電機的轉(zhuǎn)子位置信號,通過電流傳感器檢測電機三相電流,并通過電阻檢測母線電壓與給定轉(zhuǎn)速,這些信號經(jīng)過處理變?yōu)槲⑻幚砥鱀SP能識別的信號,DSP將采集到的信息進行控制算法解算,由PWM單元輸出驅(qū)動信號完成對電機的控制。原理框圖如圖2 所示[6]。
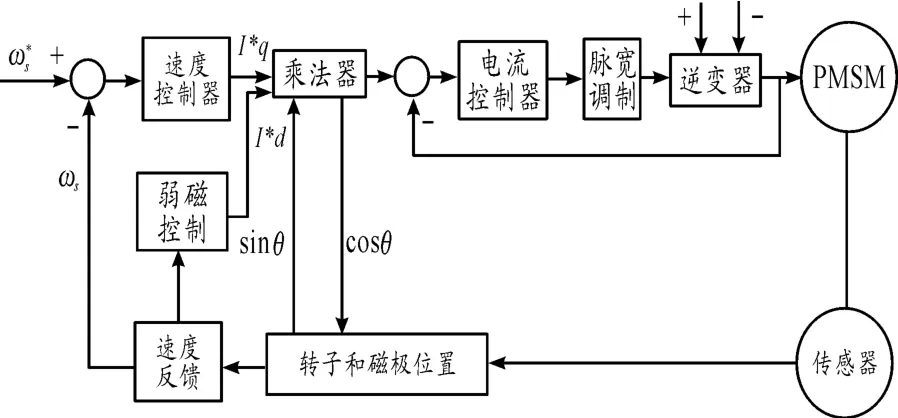
圖2 PMSM控制原理框圖
2 實驗平臺設計
2.1 平臺組成
實驗臺架由轉(zhuǎn)臺、軸承、諧波減速器、制動器及防護罩組成,隨動系統(tǒng)調(diào)試時需要安裝方位和高低傳感器[3]。動力電源由三相380 V穩(wěn)壓電源提供,控制電源的選擇需要注意,調(diào)試隨動系統(tǒng)時需要同時給方位驅(qū)動器和高低驅(qū)動器供電時,系統(tǒng)啟動瞬間電流沖擊至40 A左右。使用額定電壓35 V、額定電流5 A直流穩(wěn)壓電源供電時,在系統(tǒng)啟動瞬間容易掉電,需要用額定電壓56 V、額定電流50 A的高性能可編程電源提供控制電源。控制對象永磁同步電機的選擇可以根據(jù)項目需求選擇,該平臺電機功率為5.5 kW。
2.2 驅(qū)動控制器設計
驅(qū)動控制器主要由轉(zhuǎn)子位置檢測電路、電流檢測及整流電路、濾波電路和IPM逆變電路組成,基本采用成熟技術[7]。系統(tǒng)采用旋轉(zhuǎn)變壓器AD2S1210作為轉(zhuǎn)子位置信息的檢測單元,通過正弦模擬勵磁信號激發(fā),反饋回來兩組相位相差90°的正交正余弦信號,通過瞬時信號的檢測來判斷所在位置。電機定子三相電流的檢測采用霍爾電流傳感器(Honeywell公司的CSNE651),經(jīng)過濾波、整流后由DSP內(nèi)部集成的A/D轉(zhuǎn)換模塊獲取電流反饋值。只需檢測電機定子三相繞組中的兩相即可,另外一相由三相平衡計算得出。IPM選用三菱智能功率模塊PM150RL1A060,內(nèi)部集成驅(qū)動電路,由DSP的ePWM外設輸出的PWM波來控制輸出。
驅(qū)動控制器的核心設計驅(qū)動控制板以TI公司新型DSP處理器TMS320F28335和邏輯時序控制CPLD為控制芯片[8-9]。新型F2833x浮點控制器與TI前代領先數(shù)字信號控制器相比,性能平均提高50%,并與定點C28x控制器軟件兼容。DSP適用于電機控制的ePWM、ADC、eCAN、SPI和SCI等外設完成各自的功能與任務。控制板組成圖如圖3所示。
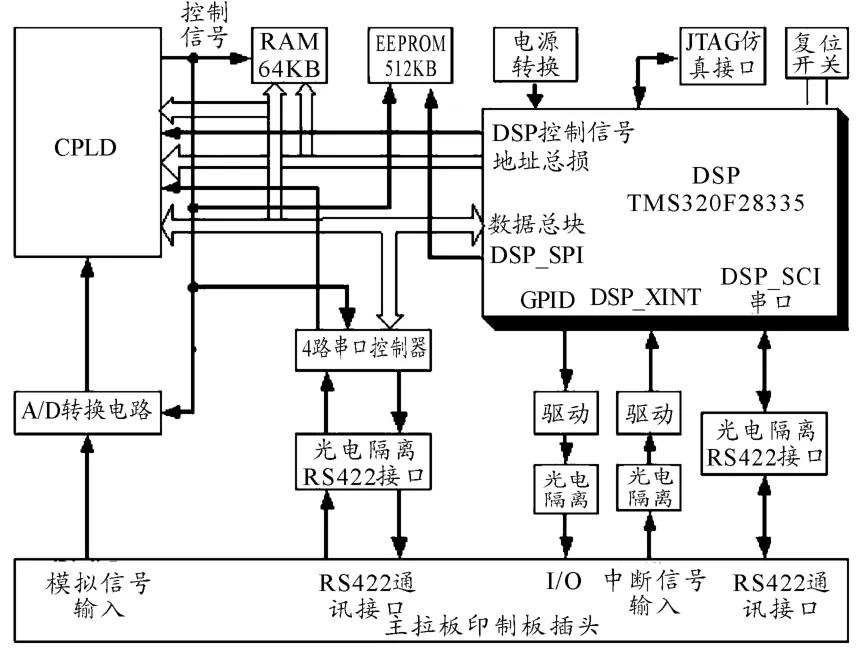
圖3 控制板組成圖
系統(tǒng)軟件由DSP主程序和PWM中斷程序組成,主要包括串口通信、CAN通信、控制算法、D/A輸出等。
3 實驗平臺功能實現(xiàn)
作為工程研發(fā)設計實驗平臺,其功能不僅限于PMSM系統(tǒng)設計,更著力于相關領域預研項目和研究生課題項目的研究探索,在做好型號項目技術儲備同時,便于新員工對整個隨動系統(tǒng)有全面直觀的認知,為此,著重從以下幾方面培養(yǎng):
1)PMSM仿真系統(tǒng)建模研究[10-11]。鑒于新員工對自動控制理論在PMSM控制系統(tǒng)中的應用和實現(xiàn)過程的理解很難做到理論與實踐相結(jié)合,有必要先通過在Simulink環(huán)境中建立系統(tǒng)仿真模型,盡可能接近系統(tǒng)實際情況,通過對PMSM模塊提供的定子電阻、轉(zhuǎn)動慣量、摩擦系數(shù)和極對數(shù)等參數(shù)的實時調(diào)整,了解磁場定向控制原理及坐標變換理論的實現(xiàn)過程,進而對整個PMSM控制系統(tǒng)的實現(xiàn)過程有全面掌握。
仿真系統(tǒng)具有良好的開放性,學生通過PMSM仿真模型的搭建,將學習研究的各種以經(jīng)典控制理論或現(xiàn)代控制理論為基礎的各個環(huán)節(jié)的控制算法方便地移植到仿真系統(tǒng)中進行反復測試驗證,直至仿真結(jié)果的合理性和可行性得到認可,再借助實驗平臺實現(xiàn)工程設計。
2)PID參數(shù)調(diào)整實驗[12]。根據(jù)給定的系統(tǒng)設計指標確定系統(tǒng)模型,在Simulink環(huán)境下搭建系統(tǒng)方框圖,根據(jù)系統(tǒng)帶寬、穩(wěn)態(tài)精度和穩(wěn)定性之間的指標約束,尋找PI參數(shù)的最佳值,實現(xiàn)PID控制器設計。其中PID控制參數(shù)的選擇采用湊試法,即通過系統(tǒng)閉環(huán)運行,觀察系統(tǒng)的響應曲線,然后根據(jù)各調(diào)節(jié)參數(shù)對系統(tǒng)響應的大致影響,反復湊試參數(shù),以達到滿意的響應,從而確定PID調(diào)節(jié)參數(shù)。然后根據(jù)Matlab仿真結(jié)果,在實驗平臺上調(diào)整參數(shù),直至系統(tǒng)品質(zhì)滿足要求。
3)驅(qū)動控制器設計。驅(qū)動控制器主要由轉(zhuǎn)子位置檢測電路、電流檢測及整流電路、IPM逆變電路和驅(qū)動控制板組成。位置傳感器可以選用旋轉(zhuǎn)變壓器或光電編碼器,根據(jù)所需傳感器的不同選擇相對應的位置檢測電路。驅(qū)動控制板設計從最初基于單片機MCU控制到數(shù)字控制器DSP TMS320F2407、TMS320F2812、TMS320F28335 系列,從 DSP+邏輯時序控制芯片CPLD組合到DSP+現(xiàn)場可編程門陣列FPGA組合,設計組合靈活多變。
軟件設計主要在Code Composer Studio 3.3環(huán)境下用C語言編寫,CPLD或FPGA程序設計則由選擇的芯片廠商對應不同編譯環(huán)境。
4 實驗結(jié)果
系統(tǒng)控制對象永磁同步電機主要參數(shù)有∶額定功率5.5 kW,額定轉(zhuǎn)矩18.6 N·m,額定轉(zhuǎn)速3200 r/min,轉(zhuǎn)動慣量82×10-4kg·m2,額定電壓270V±10V,允許2倍過載。
圖4是電機啟動至高轉(zhuǎn)速3500 r/min后反轉(zhuǎn)至-3500 r/min后制動時形成圖形,由圖4可看出,系統(tǒng)電機轉(zhuǎn)速由0~3500 r/min上升曲線、3500~-3500 r/min反轉(zhuǎn)曲線和-3500~0 r/min制動曲線均平滑快速,基本無超調(diào),無振蕩。
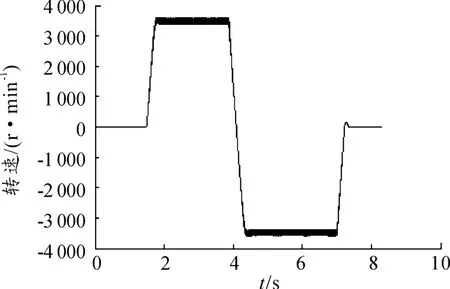
圖4 轉(zhuǎn)速3500~-3500 r/min圖形
對應A相電流如圖5,根據(jù)電流采樣電路電阻匹配比例關系(圖5中縱軸坐標為A相電流數(shù)字量,512對應113.3 A),估計A相電流值。圖5中系統(tǒng)啟動至高轉(zhuǎn)速過程中A相電流迅速升至峰值,高轉(zhuǎn)速平穩(wěn)后A相電流穩(wěn)定在固定范圍內(nèi),B相電流變化過程相似。由轉(zhuǎn)速曲線和相電流曲線趨勢可知該驅(qū)動控制器有良好的性能。
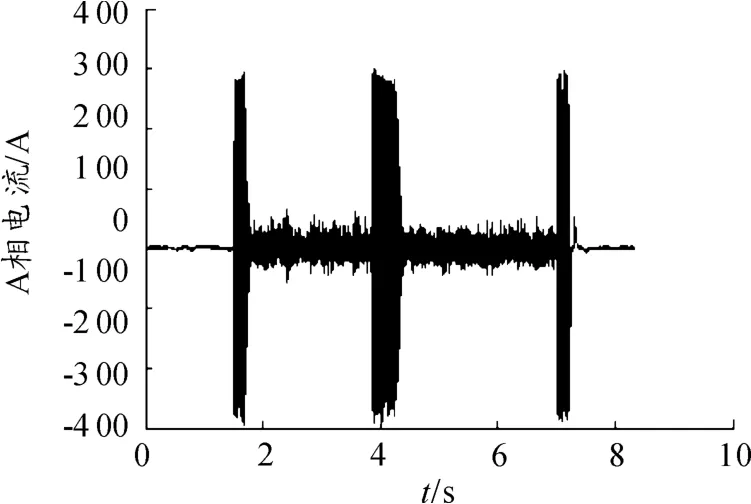
圖5 轉(zhuǎn)速3500~-3500 r/min對應A相電流圖形
5 結(jié)論
高性能永磁同步電機實驗平臺可以由淺入深系統(tǒng)全面地提供電機轉(zhuǎn)子位置檢測、驅(qū)動控制器設計、DSP編程等多種類型的實驗,具有綜合性、多功能性、易于連線和調(diào)試等特點。該實驗平臺已在某預研項目隨動系統(tǒng)設計開發(fā)過程中投入使用,取得了良好的效果。實驗平臺具有良好的可擴展性,對永磁同步電機控制系統(tǒng)相關領域的科研探索有很好的利用價值。
[1]王宏佳,楊明,牛里,等.永磁交流伺服系統(tǒng)速度控制器優(yōu)化設計方法[J].電機與控制學報,2012(2):25-31.
[2]王鑫,李偉力,程樹康.永磁同步電動機發(fā)展展望[J].微電機,2007(5):69-72.
[3]張莉松,胡祐德,徐立新.伺服系統(tǒng)原理與設計[M].北京:機械工業(yè)出版社,2008.
[4]舒志兵.交流伺服運動控制系統(tǒng)[M].北京:清華大學出版社,2006:2-11.
[5]紀洪明,富歷新.永磁同步電機全數(shù)字伺服系統(tǒng)硬件設計[J].機械與電子,2005(7):24-27,29.
[6]趙仁峰,何偉,姜朋昌,等.永磁交流伺服系統(tǒng)實驗臺設計與研究[J].機械設計與制造,2010(1):23-24.
[7]劉日寶,王愛祥.基于DSP+FPGA的交流伺服驅(qū)動器設計[J].微特電機,2011(11):21-23,29.
[8]劉陵順,高艷麗,張樹團,等.TMS320F28335 DSP原理及開發(fā)編程[M].北京:北京航空航天大學出版社,2011.
[9]TI.TMS320F28xx和TMS320F28xxx DSCs的硬件設計指南[Z].2001.
[10]徐東,劉敬猛.永磁同步電機伺服仿真系統(tǒng)關鍵技術研究[J].實驗技術與管理,2012(4):321-324,29.
[11]薛定宇.控制系統(tǒng)計算機輔助設計:Matlab語言與應用[M].2版.北京:清華大學出版社,2006.
[12]崔偉成,孟凡磊,劉林密.導彈發(fā)射裝置隨動系統(tǒng)實驗平臺構建[J].實驗技術與管理,2011(12):66-68,28.
[13]李海俠.交流伺服系統(tǒng)無速度傳感器模糊控制策略研究[J].機床與液壓,2013(1):31-34.
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52