葉柵式反推裝置的受載與傳力
2015-09-12 07:50:40張少軍王漢平何江軍孫利兵
兵器裝備工程學報 2015年3期
張少軍,王漢平,何江軍,孫利兵
(1.北京理工大學宇航學院,北京 100081;2.中國航空工業集團沈陽發動機設計研究所,沈陽 110015)
隨著我國大型飛機的巨大發展,對大涵道比渦扇發動機的需求愈來愈大。有效的減速裝置是大型飛機的必備功能[1]。目前,幾乎所有先進的大型飛機都采用發動機反推力裝置來進行減速[6],其中,葉柵式反推器是應用較為廣泛的一種反推裝置,雖然這種反推裝置會增重和增加發動機設計復雜性,但還是以其獨有的集成度高、可靠性高、對不同的發動機工況適應性強等優點,在國外得到了較廣泛的應用[7]。相對于國外比較成熟的研究現狀,國內目前對反推力裝置研究基本處于空白狀態[2]。本文以葉柵式反推器為研究對象,在對模型進行簡化的基礎上完成了剛體建模,消除了過約束,簡化了分布載荷,仿真得到機構關鍵部件在任意行程下的受力情況,分析可能出現的機構設計的不合理之處,得到了有工程參考價值的結果。
1 葉柵式反推裝置結構分析與運動原理
圖1為葉柵式反推力裝置結構及流路示意圖。它由作動系統、扭矩盒、阻流門、拉桿、轉接件及起固定框架作用的上導軌梁、下導軌梁、扭矩盒等組成。正推力狀態下、氣流從外涵噴管噴出,產生正推力。反推力狀態時,因移動外罩后移,露出葉柵,阻流門 擋住發動機外涵道,使外喊道氣流轉入導流葉柵中,并沿葉柵所的方向噴出,從而達到產生反推力的目的。
如圖1所示,葉柵式反推力裝置打開過程機構的運動為:作用筒伸展驅動移動外罩向后平移,阻流門2上的A點跟隨移動外罩向后平移,阻流門通過轉接件3帶動拉桿4在以D為圓心的圓周上運動,從某特定位置開始,阻流門在拉桿和轉接件的作用下,在移動外罩向后平移的同時繞A點轉動,達到圖1(b)所示反推狀態。移動外罩為平動,而阻流門的運動為隨移動外罩平動及繞平動的A點轉動。通過更改作用筒的伸展速度,可改變移動外罩及阻流門的平移速度,而改變D點位置及轉接件結構、拉桿長度等參數可改變阻流門開始轉動的位置及轉動速度。反推裝置關閉過程與打開工程機構運動相反[3]。
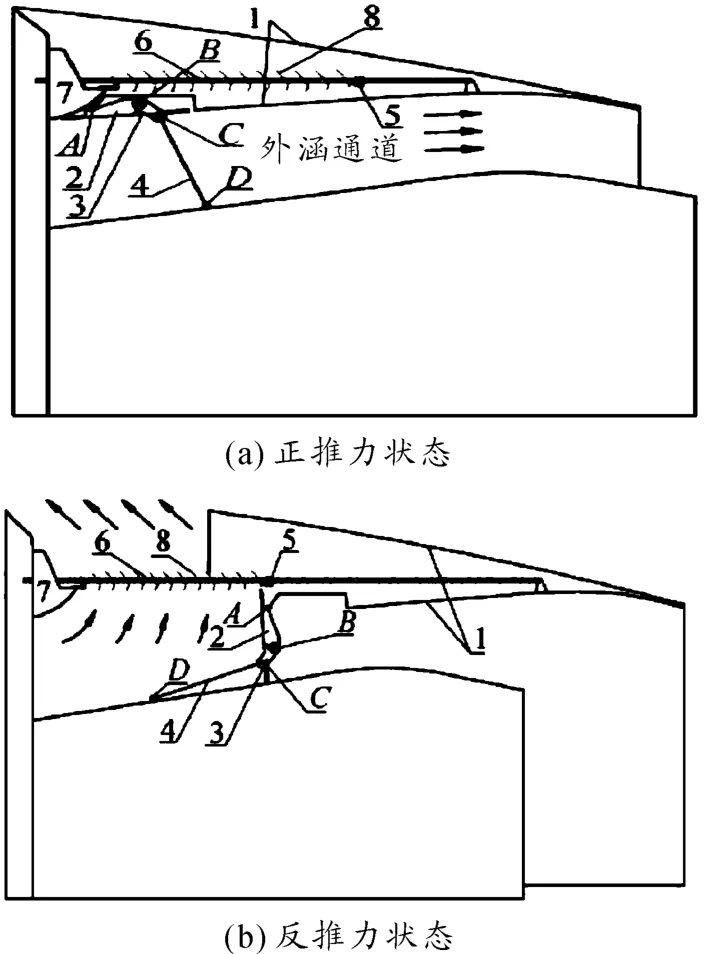
圖1 葉柵式反推力裝置結構及流路示意圖
2 多剛體模型的建立
葉柵式反推裝置分為對稱的兩部分,分別通過預設的吊點與飛機的機翼相連,由于具有對稱性[4],選取機構的一半作為研究對象,但零件仍多達上千個,如何正確的簡化將是建模的前提[5]。通過對結構分析,確立了反推裝置機構的拓撲關系。為了減少模型規模,將沒有相對運動的零件合并成一個part并重新命名,通過這樣的簡化和合并操作之后,整個反推裝置運動機構的運動構件數量大大減少。
添加約束時考慮到本模型需要添加的約束和marker點眾多,采用絕對坐標來表述marker和約束工作量巨大且很難保證精度,所以將整個反推裝置模型模化為一種樹狀結構,本模型定義全局坐標系的全局作為基準點,然后計算出外涵內壁和拉桿之間的鉸鏈點在基準點坐標系下所處的位置,使用LOC_RELATIVE_TO函數和ORI_RELATIVE_TO函數來完成marker的位置和方向的設置。完成以上5個marker點的定義之后,再分別以這5個點向前推進直至全部marker點建立完畢。marker點添加完成后可在其基礎上添加約束,一般定義完一組marker后就向marker各自所屬的part間添加約束。為保證存在約束關系的兩part之間約束的合理,一般這兩part的marker借助LOC_RELATIVE_TO和ORI_RELATIVE_TO函數來進行定義,確保位置和方向的一致性,約束情況如圖2所示。
需要指出的是為了減少模型仿真的計算量,應盡量避免添加實體對實體的接觸約束,在本模型中,為了防止阻流門在拉桿的推力下向后移動,在每個阻流門與門后結構之間添加了接觸(共10處)。同樣,為了保證阻流門和拉桿的運動軌跡,在每個轉接件與對應阻流門之間添加了接觸(每個轉接件2處接觸,共10處)。

圖2 理想約束示意圖
反推機構整體是一個高度復雜的空間機構,由圖2可知機構不僅形成了封閉的回路,而且是環中套環,如果按圖2中實際約束去建模,產生了多達70個過約束。然后ADAMS對過約束進行了自動剔除,此過程有很多不合理的現象產生,最終導致模型不能按設計的運動方式運動或機構承載和傳力發生明顯差異,所以必須人工進行過約束處理。圖3為最終的約束方式。從圖2和圖3對比可知,除了固定副之外基本全做了變化,其中最為關鍵的改動有兩處。
1)對液壓裝置的處理。在此把液壓裝置拆成7部分,分別為液壓蓋,3個液壓筒,3個液壓桿。在液壓蓋與3個液壓筒之間添加垂直約束,在液壓筒與對應的液壓桿之間添加移動副,在液壓桿與移動外罩之間添加球鉸。
2)對導軌處約束的處理。經過不斷的嘗試,最終發現任何一種約束都無法滿足要求,最終選擇在此處消除一切約束,而用接觸代替。
經過以上處理之后,成功的消除了過約束,機構運行平穩,受載也變得均勻合理。
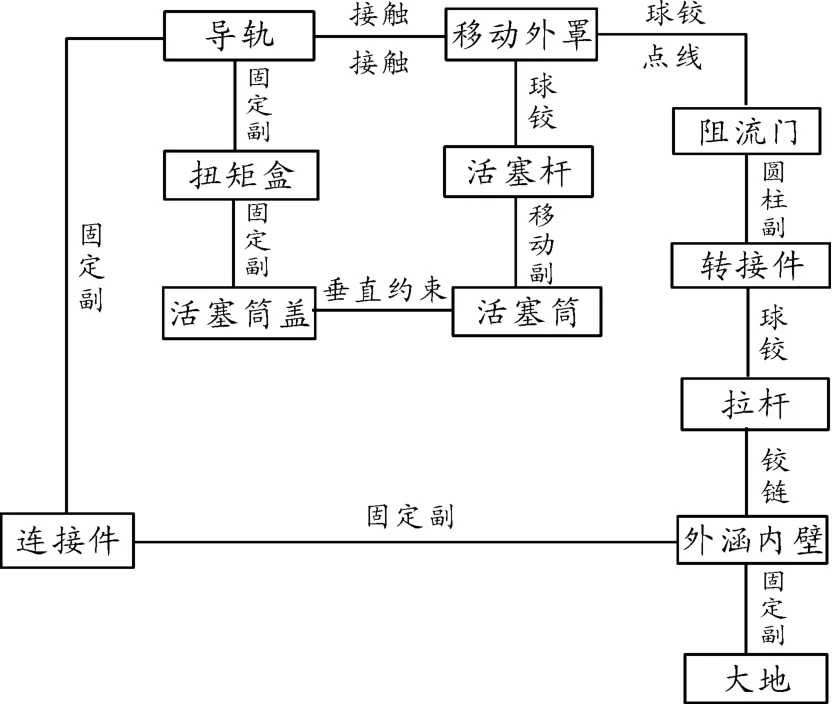
圖3 消除過約束后的約束示意圖
3 載荷處理與加載
3.1 阻流門載荷的處理
根據剛體載荷簡化理論,在進行載荷處理時,主要思路是用自編程序代碼將作用于阻流門上的分布氣動載荷等效為針對某點的集中載荷,然后再在ADAMS環境中對等效集中載荷進行插值處理以獲取任意行程下阻流門的受載特性。
需要加載的5個阻流門中,中間3個阻流門形狀一樣,只需要簡化一次即可,通過測量分析,最終把阻流門劃分為矩形和梯形兩部分,簡化中心選為下邊緣中心,如圖4所示。相比中間3個阻流門,阻流門1和阻流門5的形狀更特殊,需要多劃分出了一個三角形部分,簡化中心仍為下邊緣中心。由于阻流門1和5的相似性,只給出阻流門1的簡化圖,如圖5所示。為了保證精度,選取1 mm為步長進行編程,程序流程圖如圖6所示。
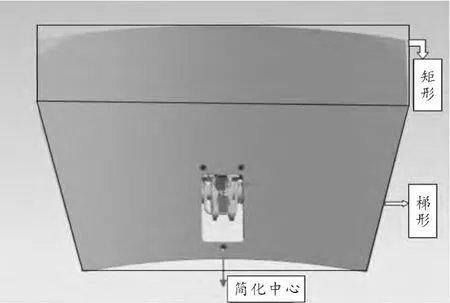
圖4 中間三個阻流門形狀簡化示意圖
3.2 零件承受燃氣流等效GFORCE的添加
機構運動過程中每個零件所處位置不同,我們借助移動外罩行程變化規律就可確定其所處的位置,然后根據零件的位置在典型狀態空間中進行插值計算,從而獲取任意行程下氣動載荷等效集中力。氣動載荷在ADAMS中的添加和處理可以借助MSC.ADAMS軟件強大的二次開發能力予以完成,首先是在反推裝置多剛體動力學模型中添加相應的GForce來模擬氣動流的載荷,該GForce載荷需要對每一個阻流門6個方向的受載按狀態空間進行插值運算來獲取;其次是采用ADAMS提供的GFOSUB來開發GForce解算程序,完成載荷的實際加載。GFOSUB的編寫采用了C語言接口,其程序的流程圖如圖7所示。
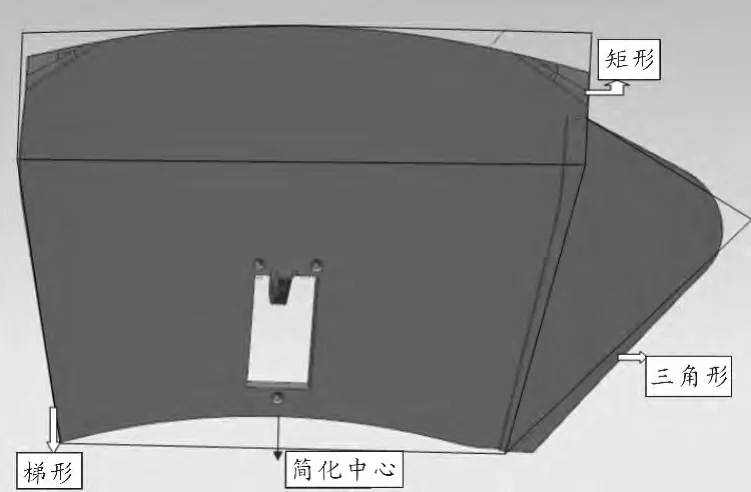
圖5 其余阻流門形狀簡化示意圖

圖6 阻流門載荷處理程序流程

圖7 GForce程序流程
4 結果分析
添加位移控制規律 -step(time,0.0,0.0,0.41,0.235*sin(2*pi*time)+0.235),使移動外罩獲得一個余弦運動規律。使用GSTIFF求解器,進行5 s的仿真,1 s為一個周期,機構由初始裝配狀態過渡到打開狀態的循環采用了step函數以提高數值計算的穩定性。所提供數據均采用無量綱化處理。
4.1 拉桿載荷特性分析
從整個趨勢看,拉桿1和拉桿5的所受合力和合力矩要比中間3個拉桿的受載大。這樣符合實際情況,因為阻流門1和阻流門5的面積要大于中間3個阻流門,所受的氣動載荷也要大,導致對應的拉桿受載也大,符合預期。

圖8 各拉桿受載合力(數據以作處理)
4.2 驅動力分析
按照實際情況,應該在3個液壓筒處添加驅動,但按照實際情況添加之后發現,3個驅動會出現不同步現象,導致3個驅動力不相同。最終只選著在中間的液壓筒處添加一處驅動,最后的驅動力除以3即為每個驅動的實際驅動力。
圖9 驅動力(數據以作處理)
5 結束語
本文在葉柵式反推裝置三維模型的基礎上,確定了構件之間的約束位置和約束形式,添加約束并消除了過約束。之后,通過修改扭簧及各種接觸的參數,使模型運動達到合理的狀態。在完成以上建模仿真的基礎上,采用自編程序代碼將阻流門上的分布載荷等效處理成等效的節點集中力載荷,按照線性插值算法編寫了能與ADAMS進行有效數據交互的載荷計算和加載子程序,完成了反推裝置多剛體動力學建模。同時,進行了仿真運算,考查反推裝置工作過程的受載和傳力,并對關鍵零件的載荷特性進行了簡要分析。此次的仿真結果可作為反推設計人員,進行實物試驗之前,對試驗中可能出現的問題作出預測。另外,本次仿真將有助于設計人員,找出反推裝置中存在的不足,為反推裝置的改進提供理論支撐。
[1]靳寶林,邢偉紅,劉殿春.飛機/發動機推進系統反推力裝置[J].航空發動機,2004,30(4):48-52.
[2]靳寶林,朱明俊.航空發動機推力矢量技術發展趨勢分析[J].航空發動機,1997(1):44-49.
[3]謝葉平,王強,邵萬仁,等.葉柵式反推裝置阻流門運動規律對氣動性能的影響[J].航空動力學報,2010(6):1297-1302.
[4]杜剛,金捷.大型運輸機發動機反推力裝置[C]//中國航空學會2007年學術年會.出版地不詳:[出版社不詳].
[5]邵萬仁,葉留增,沈錫鋼,等.反推力裝置關鍵技術及技術途徑初步探討[C]//中國航空學會2007年學術年會.出版地不詳:[出版社不詳].
[6]沙江,徐驚雷.發動機反推力裝置及其研究進展[C]//中國航空學會2007年學術年會.出版地不詳:[出版社不詳].
[7]張德志.中國大型飛機發動機研制中的關鍵技術[J].天津:中國民航大學學報,2008(10):30-33.