基于平行航向的聲自導魚雷齊射研究
2015-09-12 07:50:48楊俊
兵器裝備工程學報 2015年4期
楊 俊
(中國人民解放軍92763部隊20分隊,遼寧 大連 116041)
魚雷作為現代海戰的殺手锏武器,充分發揮其作戰效能是使用者普遍關注的問題。一般情況下,單枚聲自導魚雷就具有較高的捕獲目標概率,但當面對海上強敵時,為確保首攻奏效、掌握戰場主動權,采取雙雷齊射是潛艇魚雷攻擊的最好選擇。
研究聲自導魚雷雙雷齊射,首先要避免魚雷互導問題,所謂“互導”[1]是指相鄰魚雷自導裝置開啟工作后,其中一條魚雷航行噪聲被另一條魚雷接收,導致一條魚雷對另一條魚雷的追蹤,從而改變了追蹤魚雷的預定搜索航向。即便對于主動自導魚雷,一條雷的航向噪聲對另一條魚雷自導接收裝置也會造成強背景干擾,嚴重影響其主動探測性能,同樣失去雙雷齊射的意義。因此,組織聲自導魚雷雙雷齊射,應控制好魚雷展開散角,避免互導現象的發生,充分發揮其作戰效能。
本文以兩雷平行航向射擊為原理,建立了聲自導魚雷雙雷齊射的數學模型,進而以某型聲自導魚雷為例,運用Matlab工具[2]進行了仿真分析,給出了雙雷齊射的最優展開航程及展開散角的關系,最后以某次魚雷齊射攻擊為例,在解算出目標距離的情況下給出了魚雷散角和最優航程的選定方法。
1 魚雷聲自導工作原理
1.1 主動自導系統工作原理
魚雷主動自導系統的工作模型[3]如圖1所示,主動自導工作時,自導系統通過聲學發射基陣周期性地向海水中發射某種形式的聲波,當發射的聲信號在海水信道中傳播時遇到目標,則有一部分聲能量被反射回來,形成目標反射信號,接收機接收這個回波信號和迭加在信號上的背景干擾,對它進行處理,從而發現目標,進而進行目標參量估計和識別,最后輸出操縱魚雷的指令,跟蹤目標。
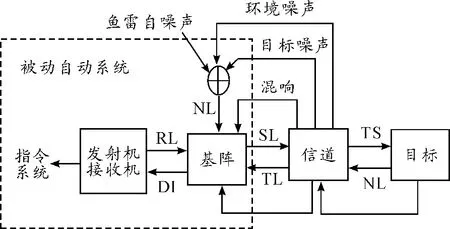
圖1 魚雷主動自導系統工作模型
魚雷自導系統工作在主動模式下,背景干擾主要是混響干擾,即由發射信號在信道中傳播時,由信道中的非均勻體產生的雜亂散射波迭加而成的干擾。混響掩蔽時的主動自導方程為

1.2 魚雷被動自導系統工作原理
魚雷被動自導系統工作原理[3]如圖2所示。顧名思義,魚雷被動自導系統工作時,自導本身不發射信號,接收機接收目標輻射噪聲和迭加在其上的背景干擾,通過對接收信號進行處理,確定目標,進而進行目標參量估計,指令系統根據接收機提供的有關信息,輸出操縱魚雷的指令,跟蹤目標。
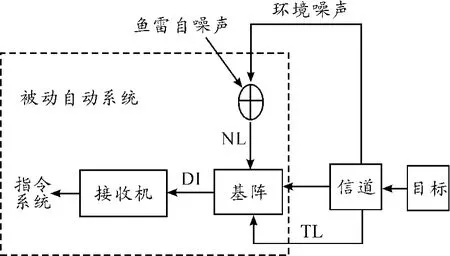
圖2 魚雷被動自導系統工作模型
被動模式下,魚雷的背景干擾主要是由魚雷的自噪聲和海洋環境噪聲干擾。被動自導方程為

由魚雷主/被動自導工作原理可以看出自導裝置是利用目標輻射或反射的能量發現目標,齊射兩雷若距離較近,一條魚雷便會進入另一條魚雷的自導扇面,形成兩條魚雷間的互相干擾,失去了魚雷齊射的意義。
2 魚雷平行航向齊射模型
組織魚雷進行平行航向齊射,首先魚雷應具有二次轉角功能,其基本思想[4]是齊射魚雷先按一定的散角α在主航向兩側展開,走完展開航程后再轉入與射擊主航向平行的航向上來搜索目標。顯然相對于扇面齊射,平行航向齊射最大的優點是魚雷自導扇面實現了連續遮蓋,避免了互導現象的發生且具有最高的目標發現概率。由圖3可見,組織實施平行航向魚雷齊射關鍵是解決好魚雷的初始展開散角和展開航程問題。
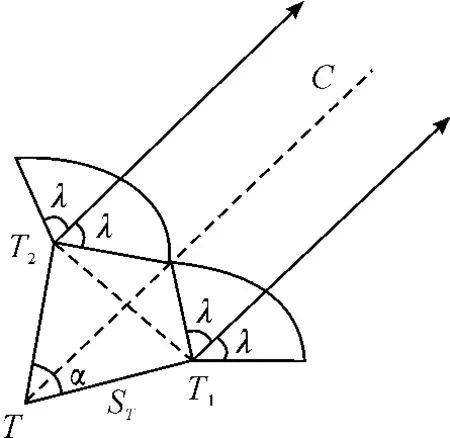
圖3 平行航向齊射原理示意圖
從圖3可以看出要使相鄰兩雷轉入平行航向后兩雷自導扇面正好相銜接,兩雷間距應滿足

則展開散角為

由于魚雷轉入平行航向之前是以扇面齊射形式展開,因此展開散角值不應小于扇面齊射最小允許散角。由上式可以看出,在自導作用距離r及扇面開角一定的條件下,展開散角與展開航程具有確定的函數關系,一般是先固定展開散角再求出對應的展開航程,即

易知魚雷最小展開航程應不小于自導開機前的魚雷航程,也就是魚雷展開航程結束后自導裝置即開始工作。最大展開航程應保證魚雷到達目標預定散步區之前已轉入平行航向搜索,以確保魚雷有最高的目標發現概率。在不同的展開散角與展開航程的組合中,對應捕獲概率最高的展開航程稱為最優展開航程。實際射擊中取以下簡化形式

優化計算表明,展開航程系數K的取值范圍為0.6~0.7。本文取K=0.65,代入式(6)可得最優展開航程ST。
3 仿真計算及分析
仿真條件:以某型聲自導魚雷為例,自導作用距離為900 m,自導扇面開角為45°,航速為45節,魚雷攻擊時,指揮儀解算的目標距離為3000 m。
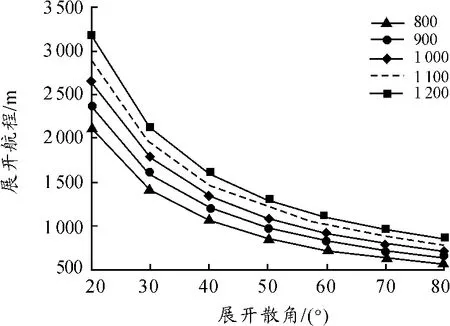
圖4 不同條件下最優展開航程同展開散角的關系
圖4給出了魚雷在不同自導作用距離下(r分別等于800,900,1000,1100 和 1200 m)展開散角和展開航程的關系,從圖可以看出隨著展開散角的增大展開航程逐漸變小;對應同一散角展開航程隨著自導作用距離的增加逐漸增大。
表1給出了不同的自導作用距離下,最優展開航程和展開散角的參考值。可以看出,在當前仿真條件下測得魚雷搜索距離為3000 m時,應該采用20°的展開散角,展開航程為2382 m,這樣確保了魚雷在進入目標區域時已經轉入平行航向搜索,避免了互導現象的發生,且具有較大的魚雷捕獲概率。若選用30°的展開散角則不妥,30°的展開航程為1598 m,展開散角大,魚雷長時間的逗留在本艇附近,危及潛艇安全,另外魚雷搜索段時間變長,給目標逃脫及實施水聲對抗提供了可能,降低了魚雷的捕獲概率。
表1 不同的自導作用距離、展開散角下的最優展開航程
4 結論
從魚雷互導產生的機理出發,建立了基于平行航向齊射的數學模型,實現了兩雷自導扇面的連續覆蓋,避免了魚雷互導的發生且具有最大的目標捕獲概率。然后以某型聲自導魚雷為例,研究了不同條件下魚雷最優展開航程和展開散角的關系,最后以某次魚雷齊射攻擊為例,在解算出目標距離的情況下給出了魚雷散角和最優航程的選定方法。實踐應用證明該研究內容為部隊使用魚雷齊射戰術、有效組織魚雷火力打擊提供了有力參考,對于進一步發揮該型裝備的作戰效能具有積極的意義。
[1]蔣興舟,陳喜.魚雷制導設計原理[M].武漢:海軍工程大學,2001.
[2]沈建森,朱書平,周徐昌.基于Matlab/Simulink的水下航行器建模與仿真[J].兵工自動化,2012,31(2):24-27.
[3]石秀華,王曉娟.水中兵器概論[M].西安:西北工業大學出版社,2010.
[4]張靜遠.魚雷作戰使用與作戰能力分析[M].北京:國防工業出版社,2005.
[5]楊俊.基于潛艇的聲自導魚雷雙雷齊射研究[J].兵工自動化,2013(9):17-19.
[6]王桂芹,黃波,丁浩.實戰背景下的魚雷聲自導系統[J].四川兵工學報,2012(9):19-20.
[7]陳建,張韌,李佳訊,等.海洋環境影響聲自導魚雷的彈道分析與動態仿真[J].火力與指揮控制,2012(8):54-57.
