深水多波束測深系統海底回波信號快速仿真方法
2015-09-07 06:44:58張威劉曉東劉治宇劉小剛董飛
聲學技術 2015年1期
張威,劉曉東,劉治宇,劉小剛,董飛
?
深水多波束測深系統海底回波信號快速仿真方法
張威1,2,劉曉東1,3,劉治宇1,3,劉小剛1,董飛1
(1. 中國科學院聲學研究所海洋技術實驗室,北京100190;2. 中國科學院大學,北京1000190; 3. 中國科學院聲學研究所聲場聲信息國家重點實驗室,北京 100190)
針對傳統深水多波束測深系統海底回波信號仿真方法計算量大和不適用于存在載體姿態的問題,提出一種深水多波束測深系統海底回波信號快速仿真方法。基于擴展散射體海底回波信號仿真模型,考慮載體姿態,通過預先計算海底散射點強度分布確定主要作用區域的散射點,并將這些散射點的強度作為回波信號幅值加權來得到回波信號。利用這一方法,在保持較小計算量的同時,可以得到包括載體姿態特征的仿真數據。此外,利用這種方法還可以進行相位不一致性等誤差因素的仿真。
深水多波束;海底回波仿真;載體姿態
0 引言
海底回波信號仿真在聲吶制造以及信號處理相關研究領域有著重要的作用。近年來,國內外學者提出了諸多的仿真模型,主要可以分為兩類:聲線模型和聲管模型。聲線模型是根據光學中的光線跟蹤技術發展而來,可以很好地反映海底的統計特性[1]。2007年Didier Gueriot等人在聲線跟蹤技術的基礎之上提出了聲管跟蹤技術[2,3],可以有效仿真背向散射強度。綜合這兩者的特點,Yoann Ladroit等人提出了擴展散射體模型[4],既可以反映出海底的統計特性也可以反映出背向散射強度,該模型非常適合于開展淺水多波束測深系統等信號的仿真。
但是對于深水多波束測深系統[5],利用這些模型所需的計算量非常大,很難在合理時間內實現。其原因在于,深水多波束測深系統探測海域最深11000 m,覆蓋可達幾十公里,信號長度長,典型發射基元可達近千個,接收基元可達一百多個,因此需要采取一定的策略,在不顯著影響精度條件下降低模型的運算量。
此外,現在主流深水多波束測深系統都采用波束穩定技術,即根據當前船舶姿態確定波束形成方向并判別海底位置,為驗證這些信號處理算法,需要對載體存在姿態條件下對海底回波信號進行仿真,這需要對上述海底方案模型進行改進。
為此,在擴展散射體模型的基礎上,本文提出一種利用散射點強度分布選出起作用的散射點的選取方案來加快仿真計算速度,同時將散射點強度值為回波信號幅值加權來反映姿態變化,使得仿真模型在保持較小計算量的同時適用于存在載體姿態條件下的回波信號仿真。
1 擴展散射體模型
1.1 模型簡介
首先簡要介紹Yoann Ladroit等人提出的擴展散射體模型[4]。聲吶系統的海底回波信號仿真基本過程如圖1所示,從發射端開始,通過控制各個發射基元時延來控制發射波束指向性,發射信號經過海底各個散射點產生背向散射信號,回波信號被接收基元所接收。
擴展散射體模型中通過選定一定波束寬度覆蓋的海底區域,網格化為散射單元,散射單元有面積特征量,從而使得回波信號中既可以反映出海底統計特性,又可以反映出背向散射強度特征。回波信號表達式為

1.2 存在載體姿態下的解決方案
雖然此模型在回波信號反映的信息量上有所改進,但若要對存在載體變化時的海底回波信號仿真,載體姿態會引起發射基元位置的變化,在做波束穩定時,每一個發射基元需要補償的時延不同,需要針對每個發射基元,計算各個散射單元對該基元發射信號的回波信號到各個接收基元的信號(圖2),這樣才可以對載體姿態引起的時延對各個發射通道進行補償,從而反映出載體姿態信息和發射基元相位不一致性等特性,其回波信號表達式為

其中,M為發射基元個數,其計算量與深度的三次方和基元數的一次方成正比。對于深水多波束測深系統,基元個數多(幾百個),發射波束數量多,仿真計算量將非常大,例如對于5000 m水深的條件下,普通PC需要幾天的時間。為此,提出了一種改進方法,稱之為基于幅值加權的仿真算法。
2 基于幅值加權的仿真算法
算法的基本思想是:
(1) 根據信號類型和載體姿態估算覆蓋范圍并網格化,計算各個散射點到各個發射基元的時延從而得到各個散射點上的強度分布;
(2) 根據散射點強度分布選取一定強度值內的散射點;
(3) 將起作用的散射點的強度值歸一化后作為回波信號幅值的加權值。掃描每個采樣時刻起作用的散射點,此時起作用的散射點的回波信號的疊加即為此采樣時刻的信號。
下面給出每個步驟的具體算法。
2.1 波束腳印
海底散射點強度分布可以反映出發射波束在載體姿態影響下的變化,載體姿態有三個方向的變化:艏搖(yaw)、縱傾(pitch)、橫滾(roll),用表示偏航角,表示在水平面內船頭方向偏離航跡方向的角度,定義從船上方看去,船頭順時針偏離航跡方向為正,反之為負;用表示縱傾,表示船頭方向與水平面的夾角,且定義船頭抬起為正,反之為負;表示橫滾,定義左舷抬起為正,反之為負。當載體存在姿態變化時,換能器基元坐標可通過公式(3)[6]換為有姿態變化后的坐標:
為達到較好的描述效果,仿真過程中使用了發射三維波束穩定算法,該算法的基本思想是通過實時計算載體姿態引起的時延,對各個發射通道進行時延補償,從而將發射波束主軸穩定在相對于發射中心的固定方向。圖3給出了在500 m水深、三種姿態共同作用下海底散射點強度值分布圖,可以看出,利用所有發射基元計算出的散射點的強度值分布可以有效反映載體姿態變化對發射波束的影響。因此,可以通過將海底各個散射點的強度作為加權值加入仿真信號中,從而使回波信號中含有載體姿態信息。
2.2 海底散射點劃分
深水多波束測深系統一般采取多個發射波束的方案,因此如果按照現有的選取方法會造成選取范圍過廣的問題。現有仿真模型中散射點的選取一般采用將海底曲面進行網格化的方法,每一個小網格作為一個散射單元,每個發射波束散射單元覆蓋的范圍可以由公式(5)估算出。
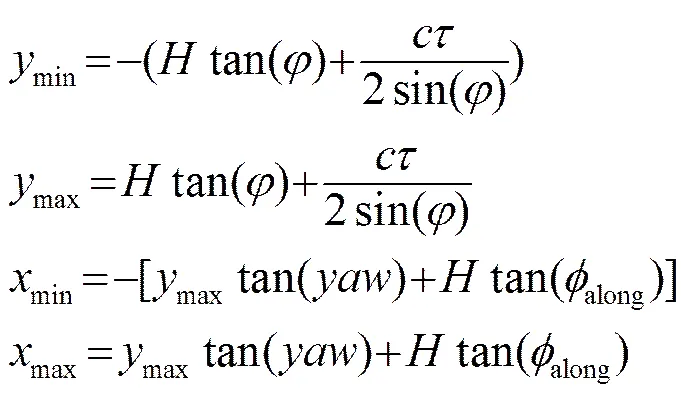
定義這種散射點選取方法為矩形區域選取方法,然而,這樣所得的覆蓋區域中,有很大一部分的散射點在波束指向性的影響下對波束信號貢獻很小。因此,可以根據散射點強度分布選取其中主要起作用的點來進行信號的仿真,以達到盡量降低散射點數的目的。圖4中給出了5°條件下矩形區域選取方法與本文散射點覆蓋區域的對比,圖中填充部分為-3 dB波束覆蓋范圍,可以滿足垂直于航跡方向±65°的覆蓋,同時散射點的數量較之矩形區域要減少很多。實際仿真時可以根據聲吶系統的波束寬度和頻率對強度范圍進行調整。
2.3 海底回波信號模型
回波信號模型如圖6所示,為發射源,當做點源;為接收源,接收端需要將各個接收通道的信號進行仿真,用于波束形成;為散射單元面的法向量;為第個散射單元的入射信號;為第個散射單元的回波信號。在不考慮噪聲、混響等干擾因素的情況下,回波信號可用公式(7)表示:

其中:表示與載體姿態有關的散射點強度;Y表示偏航角;P表示縱傾;表示橫滾;為散射單元面積;假設各個散射單元的振幅為瑞利分布;為接收基元沿著航跡方向波束指向性,相位均勻分布在;表示背向散射模型,可以根據需要選擇不同的背向散射模型,本文采用Lambert模型:。
3 仿真算法性能分析
利用第2節中的回波信號仿真方法,本文以國產深水多波束測深系統為參數模型,對海底回波信號進行了仿真。發射陣列和接收陣列如圖7所示,發射陣錯開排列方式與間隔半波長整齊排列平面陣相比,增大了發射陣垂直于龍骨方向的孔徑,增強首搖的姿態穩定能力,在船舶姿態變化較大時仍能實現測量的寬度覆蓋技術。在加入載體姿態條件下,從回波信號的相位差曲線、測底結果、計算復雜度、計算速度和仿真誤差上與擴展散射體仿真方法進行對比。
淺水仿真條件:
(1) 水深:500 m
(2) 發射方向:[-50°, 0°, 50°]
(3) 發射頻率:12 kHz
(4) 發射陣:72×12交錯排列陣,淺水區域可以只采用72×2交錯排列陣
(5) 接收陣:1×64線陣
(6) 脈沖長度:2 ms
(7) 信號類型:CW信號
(8) 載體姿態:roll=pitch=yaw=5°
3.1 平坦海底仿真結果
海底回波仿真信號后處理均采用實際海試數據后處理程序進行處理,正下方區域采用幅值法,邊緣區域采用相位法[8]。圖8、9給出了不同接收方向幅值和相位差變化,正下方±10°以內相位差模糊,其他方向相位差變化平滑,與理論相符。
圖10、11給出了不同仿真算法的海底回波仿真信號左右舷邊緣接收波束的相位差曲線對比。可以看出,在同等散射點密度的條件下,本文提出的基于幅值加權模型的相位差曲線與擴展散射體仿真方法的相位差曲線基本一致,雖然相位差曲線有輕微抖動,但是經過擬合后可以得到較為準確的回波時延。
為減小載體姿態對測深結果的誤差,對結果使用了歸位算法[6],測底結果如圖12、13所示。本文提出的基于幅值加權模型的深度結果與擴展散射體仿真方法的深度結果基本一致,其中邊緣結果一致性良好,正下方附近深度誤差略大,但在仿真允許的范圍之內。
表1給出了不同仿真算法在載體姿態時不同發射波束測底相對誤差的中值對比,兩種仿真算法都具有較小的誤差。

表1 仿真信號測底相對誤差中值
3.2 非平坦海底仿真結果
實際海底地形是變化多樣的,最常見的海底地形是斜坡,無論是劇烈變化的斜坡(懸崖)還是坡度,都是常見的海底地形。本文針對V型斜坡海底進行了仿真。仿真條件與前面相同,姿態為roll=pitch= yaw=5°。從測底圖(圖14)中可以看出,對于斜坡海底,本文的海底回波信號仿真方法仍然保持著較小的誤差。
3.3 計算量分析
本文提出的仿真算法中,發射端當做點源,根據散射點強度分布,只選擇-3 dB范圍以內的散射點。計算散射點強度的計算量與生成海底回波仿真數據計算量相比可忽略,因此,幅值加權的仿真方法的計算復雜度為:

擴展散射體仿真模型中將各個發射基元信號都進行仿真,該方法最貼近實際信號產生過程,但是計算復雜度過高,其計算復雜度為:

從理論上講,添加姿態的擴展散射體仿真模型與本文提出的基于幅值加權的仿真方法都是利用各個散射點背向散射信號的疊加進行計算。本文的仿真算法在減小計算量的同時也適用于具有載體姿態條件下的回波信號仿真,在把發射端當做點源的情況下可對姿態、相位不一致性情況進行仿真。
表2給出了在普通計算機Matlab平臺上仿真時間隨海底深度的變化,具體仿真參數與前面相同,本文提出的仿真算法在保證信號真實性的同時計算速度最快。在用于多發射基元的聲吶系統海底信號仿真時,計算速度可以有著顯著的提高。
以上分析可以看出,本文提出的仿真模型,對于不同姿態條件下所仿真的信號較好地反映了海底地形,并且具有計算量小的優點。
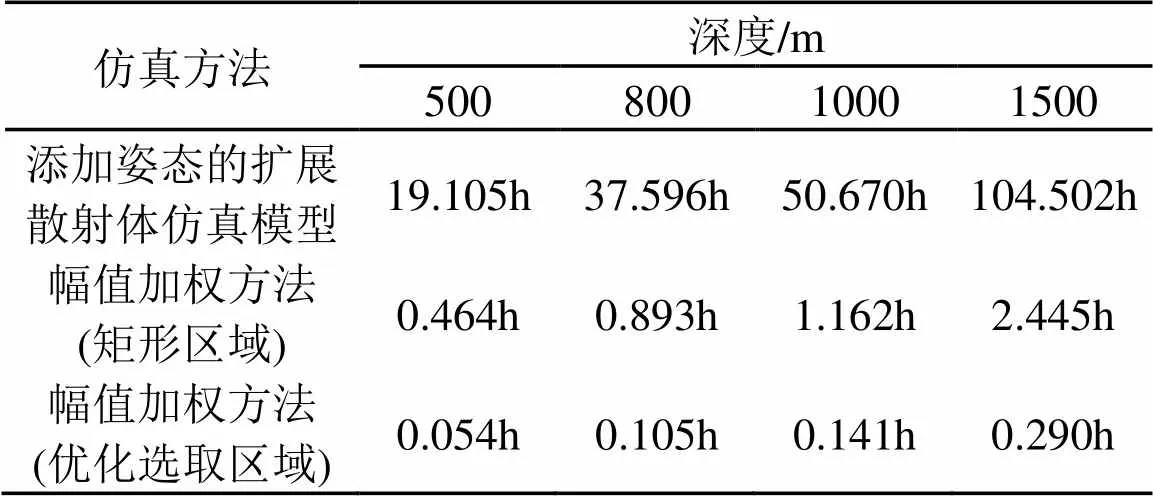
表2 仿真時間對比
4 仿真算法應用
在國產深水多波束測深系統項目中,利用本文提出的海底回波信號快速仿真方法仿真的信號,對三維波束穩定算法和歸位算法進行了驗證,同時,對深水9發射波束情況進行了仿真,驗證了仿真模型的有效性。
4.1 三維波束穩定算法和歸位算法驗證
圖15是實際姿態傳感器采集的數據,利用實際傳感器數據,假設海底是平坦海底。三維波束穩定算法和歸位算法[6]主要用于解決載體姿態引起的多波束測深誤差和海底條帶雜亂等問題。圖16給出了利用仿真數據所得測深條帶拼接的對比圖,使用波束穩定算法和歸位算法前的測深條帶分布受載體姿態影響,會有很大程度上的過度稀疏或過度密集,影響成圖質量。而采用波束穩定算法和歸位算法后的測深條帶分布較為均勻,測深條帶覆蓋范圍穩定,有效提高了測深圖的質量。
4.2 深水9發射波束情況的仿真
仿真條件:
(1) 水深:4000 m
(2) 發射方向:[-64°,-45°,-32°,-18°, 0°, 18°, 32°, 45°, 64°]
(3) 發射頻率:12 kHz
(4) 發射陣:72×12交錯排列陣
(5) 接收陣:1×64線陣
(6) 脈沖長度:15 ms
(7) 信號類型:CW,chirp信號
(8) 載體姿態:roll=pitch=yaw=5°
依據上述條件的仿真結果見圖17,可以看出,本文的仿真算法對于深水條件下的聲吶海底回波信號也可以得到很好的仿真數據(此條件下得到一屏仿真數據普通PC大概需要2 h)。
4.3 相位不一致性
深水多波束測深系統中,發射陣列基元和接收陣列基元的不一致性會引起測深結果的誤差。對存在相位不一致性條件下的回波信號的仿真可用于研究校正算法。通過生成發射和接收基元隨機模擬基元相位不一致性,圖18中給出了接收、發射基元±10°隨機相位條件下的測底結果,可以看出,在邊緣波束有著較為明顯的誤差。
5 結論
本文提出了一種既能反映出載體姿態變化又保持較小計算量的深水多波束測深系統海底回波信號仿真方法。在對平坦和非平坦海底的驗證中,都有著理想的結果。利用本文的仿真算法,對三維波束穩定算法和歸位算法,從仿真角度進行了有效的驗證。
本文的仿真方法中沒有考慮聲速梯度、混響、噪聲、衰減等因素,可以進一步完善使之更加貼近實際情況。本文的仿真方法可以用于分析深水多波束測深系統的誤差、驗證測深或修正算法,可有效地減少研發成本,有著較為廣闊的應用前景。
[1] Sintes C, Gueriot D. Interferometric sonar signal simulation through tube tracing[C]// OCEANS 2008-MTS/IEEE Kobe Techno-Ocean. IEEE, 2008: 1-8.
[2] Gueriot D, Sintes C, Garello R. Sonar data simulation based on tube tracing[C]// OCEANS 2007-Europe. IEEE, 2007: 1-6.
[3] Gueriot D, Sintes C. Forward looking sonar data simulation through tube tracing[C]// OCEANS 2010 IEEE-Sydney. IEEE, 2010: 1-6.
[4] Ladroit Y, Sintes C, Lurton X, et al. Extended scatterers model for fast sonar signal simulation[C]// Oceans, 2012-Yeosu. Ieee, 2012: 1-5.
[5] 胡銀豐, 朱輝慶, 夏鐵堅. 現代深水多波束測深系統簡介[J]. 聲學與電子工程, 2008(1): 46-48.
HU Yinfeng, ZHU Huiqing, XIA Tiejian. Modern deep water multibeam bathymetric Introduction[J]. Acoustics and Electronics Engineering, 2008(1): 46-48.
[6] 陳若婷, 劉曉東, 劉治宇, 等. 一種基于橫搖穩定的多波束測深方法[J]. 聲學技術, 2013, 32(5): 368-372.
CHEN Ruoting, LIU Xiaodong, LIU Zhiyu, et al. A bathymetric algorithm based on roll compensation for multi-beam echo sounder[J]. Technical Acoustics, 2013, 32(5): 368-372.
[7] Daniel S, Gueriot D, Maillard E P. Underwater environment restitution through sonar images and swath bathymetry rendering[C]// Systems, Man, and Cybernetics, 1998. 1998 IEEE International Conference on. IEEE, 1998, 5: 4417-4422.
[8] Lurton X. Swath bathymetry using phase difference: theoretical analysis of acoustical measurement precision[J]. IEEE Journal of Oceanic Engineering, 2000, 25(3): 351-363.
A fast simulation method of seabed scattering signal for deep-water multibeam echo sounder
ZHANG Wei1,2, LIU Xiao-dong1, LIU Zhi-yu1, LIU Xiao-gang1, DONG Fei1
(1. Laboratory of Ocean Acoustics Technology,Institute of Acoustics, Chinese Academy of Sciences,Beijng100190, China;2.University of Chinese Academy of Sciences,Beijng100190, China;3.State Key Laboratory of Acoustics,Institute of Acoustics, Chinese Academy of Sciences,Beijng100190,China)
In order to find a balance between the computational time consumption and the accuracy of the physical phenomenon description of simulated sonar signal, this paper presents a fast simulation method of seabed scattering signal based on extended scatters model. Considering the attitude of carrier, the basic idea is using the intensity data of seabed scattering signal to select scatter areas, and then to normalize the scattering intensities from these areas as the amplitude weights of seabed scattering signals to reflect the attitude changes of the transmitting array in the simulated sonar signals. Comparing to the traditional simulation method, the simulation method presented in this paper can reduce the computational complexity and contain attitude information in the signal. Besides, the method can be used to simulate the sonar signal containing phase error information.
deep-water multibeam echo sounder;sonar signal simulation; attitude
TB565
A
1000-3630(2015)-01-0011-07
10.16300/j.cnki.1000-3630.2015.01.003
2014-05-14;
2014-08-24
國家863計劃項目(2007AA090901)
張威(1988-), 男, 江蘇連云港人, 碩士, 研究方向為信號與信息處理。
劉曉東, E-mail: liuxd@mail.ioa.ac.cn
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
光學精密工程(2016年6期)2016-11-07 09:07:19
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
核科學與工程(2015年4期)2015-09-26 11:59:03