基于工業(yè)機器人安全I/O接口控制系統(tǒng)設計
2015-09-02 08:29:22孫英飛羅愛華安徽埃夫特智能裝備有限公司安徽蕪湖241000
中國新技術新產品 2015年19期
孫英飛 羅愛華 徐 亮(安徽埃夫特智能裝備有限公司,安徽 蕪湖 241000)
高新技術
基于工業(yè)機器人安全I/O接口控制系統(tǒng)設計
孫英飛羅愛華徐亮
(安徽埃夫特智能裝備有限公司,安徽蕪湖241000)
針對工業(yè)機器人安全I/O接口控制系統(tǒng),主要是將安全接口電路系統(tǒng)分為I/O接口系統(tǒng)和安全處理系統(tǒng)兩部分組成,完成安全邏輯保護功能、伺服接口控制功能、PMAC軸接口功能、PMAC各I/O光電隔離處理以及外圍通訊控制功能設計。通過現(xiàn)場大量的應用驗證了此系統(tǒng)的正確性和可行性。
工業(yè)機器人;I/O接口控制系統(tǒng);PMAC;光電隔離
隨著科學技術的進步和人們對產品質量的要求,大量國外工業(yè)機器人已廣泛應用于國內各大工廠的各條生產線上,但是工業(yè)機器人安全I/O接口控制系統(tǒng)在國內還是空白。目前各大工廠引進的國外機器人包括KUKA、FUNUC、COMAU等世界知品牌名機器人,而國產工業(yè)機器人卻鳳毛麟角,對工業(yè)機器人安全I/O接口控制系統(tǒng)的研究就更少了。針對目前機器人技術被國外壟斷的局面,對機器人安全I/O接口控制系統(tǒng)的研究對成本節(jié)約和人機安全方面有著重要意義。這套系統(tǒng)用于國產ER165-C30重載點焊工業(yè)機器人上,并已投入奇瑞汽車公司焊裝生產線應用直到現(xiàn)在,使得現(xiàn)場較多外圍安全裝置都能得到有效控制,I/O接口擴展方便,系統(tǒng)運行穩(wěn)定,故障率較低,擁有防塵和散熱保護,維修維護非常方便,不但能滿足生產需求,而且性能穩(wěn)定。
1 安全I/O接口控制系統(tǒng)設計內容
安全I/O接口控制系統(tǒng)主要分為I/O接口板和安全板兩部分組成,整個系統(tǒng)完成安全邏輯保護功能、伺服接口控制功能、PMAC軸接口功能、PMAC各I/O光電隔離處理以及與外圍設備通訊控制功能。
2 安全I/O接口控制系統(tǒng)整體介紹
工業(yè)機器人安全I/O接口控制系統(tǒng)實物如圖1所示。
3 安全I/O接口控制系統(tǒng)各功能介紹
3.1安全邏輯保護電路
安全I/O接口控制系統(tǒng)的安全邏輯電路是通過判斷PMAC看門狗報警和各種急停(包括機器人控制柜急停、機器人示教盒急停、用戶外部急停、安全門急停、備用急停等),再由軟件編程來控制伺服系統(tǒng)主電源的接通和斷開,通過硬件邏輯電路處理和軟件邏輯判斷來實現(xiàn)對機器人的安全控制。
3.2伺服控制模塊
安全I/O接口控制系統(tǒng)的伺服控制模塊主要是實現(xiàn)各軸編碼器信號的讀取和發(fā)送、位置模式或速度模式的控制,每個軸的伺服使能、伺服準備、伺服報警和電機抱閘的控制。
3.3伺服使能
安全I/O接口控制系統(tǒng)的伺服使能主要是通過軟件將PMAC使能輸出置位,同時控制機器人各個軸使能。
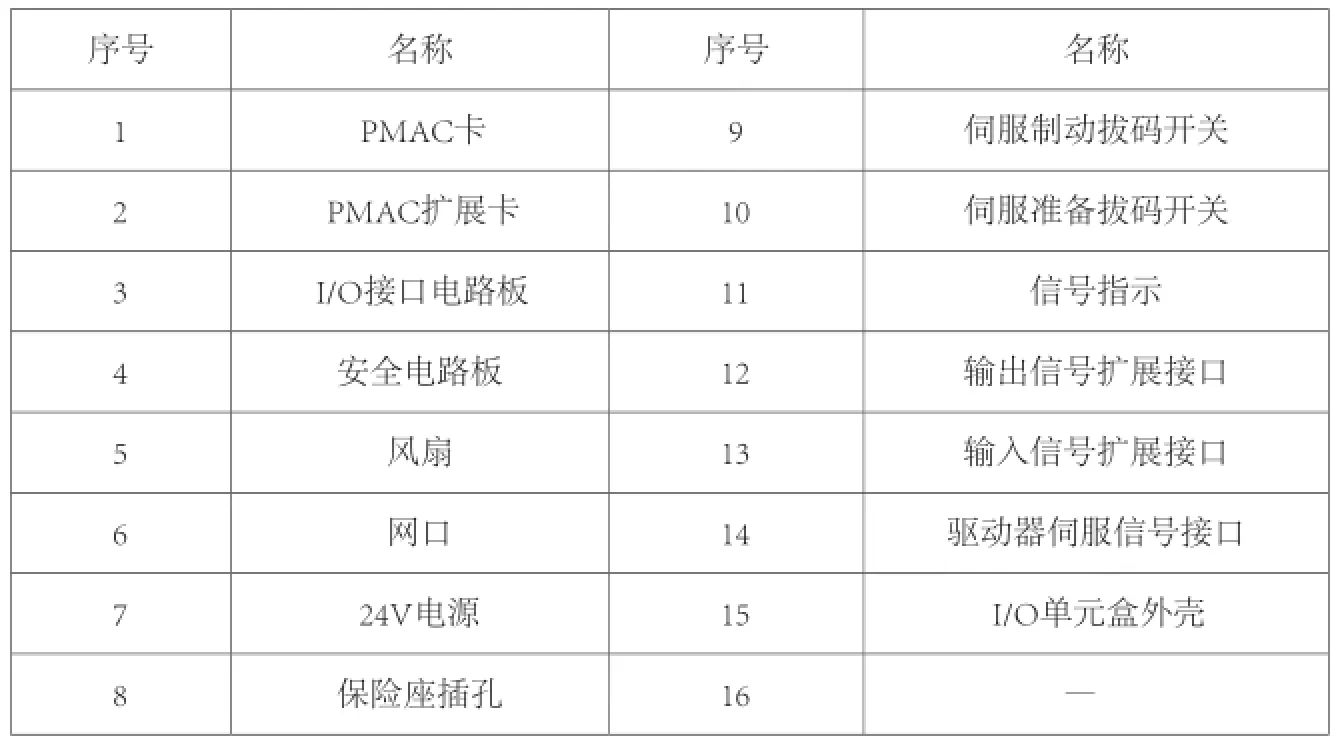
表1 安全I/O接口控制系統(tǒng)
3.4伺服準備
安全I/O接口控制系統(tǒng)的伺服準備主要是用來控制,當機器人各個軸的伺服均處于正常狀態(tài)下,伺服驅動器才發(fā)出伺服準備信號,此時機器人才能將抱閘打開。
3.5伺服報警和撥碼開關
安全I/O接口控制系統(tǒng)的伺服報警主要是用來控制,當伺服驅動器中任何一軸發(fā)生伺服報警時,機器人均產生伺服故障報警,機器人各軸電機輸出抱閘信號使其抱閘,在伺服報警未清除或故障未解決之前,機器人無法運動。此時只有手動將伺服準備和抱閘撥碼開關撥為ON狀態(tài),才能使各軸抱閘打開,才能使未發(fā)生伺服報警的軸使能運動。
3.6PMAC軸接口電路
安全I/O接口控制系統(tǒng)的PMAC軸接口電路主要是用來控制,PMAC與伺服之間的通訊、控制信號的轉接和處理,編碼器位置信號的讀寫、伺服使能、伺服報警、模擬量控制信號、脈沖控制信號、標志位、PMAC看門狗報警處理等。
3.7輸入輸出接口電路
安全I/O接口控制系統(tǒng)的輸入輸出接口電路主要是用來控制,將PMAC中各軸標志位和通用I/O經輸入輸出電路板用光電隔離處理。輸入以高電平有效,輸出通過繼電器處理,提高帶負載能力,高低電平均有效。可用輸入24個,可用輸出23個。輸入輸出均通過D型頭連接。JJ1和JJ2為輸入口,JJ3、JJ4和JJ5為輸出口。
3.8指示燈信號
安全I/O接口控制系統(tǒng)的接口板各指示燈從上到下分別為開伺服、示教盒急停、再現(xiàn)、外部急停、安全門急停、備用急停、PMAC主控、PMAC看門狗報警、伺服準備、制動、使能、伺服報警。
結論
此工業(yè)機器人安全I/O接口控制系統(tǒng),已經成功的運用到了安徽埃夫特智能裝備有限公司所有的ER165-C30機器人上,機器人在生產過程中表現(xiàn)了良好的穩(wěn)定性和安全性,也更好的解決了機器人與外圍設備的信號交互,不但提高了機器人的運行效率,而且也保證了機器人的安全性。
[1]周孝成,孟正大.KUKA機器人運動學算法的研究[J].工業(yè)控制計算機,2014,19(09):64-67.
[2]劉金漢.點焊工業(yè)機器人系統(tǒng)的開發(fā)與研究[J].機器人,2000,22(07):156-161.
[3]蘭文寶.基于PMAC的工業(yè)機器人控制系統(tǒng)研究與實現(xiàn)[D].哈爾濱工程大學,2013.
[4]陳紅春.基于PMAC的開放式數(shù)控系統(tǒng)的研究[D].浙江大學,2006.
[5]黃堅,宋麗蓉.數(shù)控伺服系統(tǒng)位置控制模式的研究[J].電氣傳動,2005,12(08):23-26.
[6]門昌華,關學鋒,胡明.基于PMAC的六自由度機器人開放式控制系統(tǒng)開發(fā)[J].機電產品開發(fā)與創(chuàng)新,2008,4(08):15-18.
[7]昕皓.基于PMAC的機器人伺服系統(tǒng)研究[D].東北大學,2009.
TP242.2
B
資金來源:國家高技術研究發(fā)展計劃(863計劃)課題。課題編號:2014AA041601。
課題名稱:面向建材行業(yè)的經濟型工業(yè)機器人應用示范。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
科技傳播(2019年22期)2020-01-14 03:06:54
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
電子制作(2018年11期)2018-08-04 03:25:42
中國科技論壇(2017年7期)2017-07-25 08:49:53
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
