弓網(wǎng)振動(dòng)試驗(yàn)系統(tǒng)的改進(jìn)幅相自適應(yīng)控制設(shè)計(jì)
2015-08-23 09:37:08魏巍楊志東韓俊偉
哈爾濱工程大學(xué)學(xué)報(bào) 2015年5期
魏巍,楊志東,韓俊偉
(哈爾濱工業(yè)大學(xué)機(jī)電學(xué)院,黑龍江哈爾濱150000)
弓網(wǎng)關(guān)系是高速列車(chē)能否安全有效運(yùn)行的關(guān)鍵環(huán)節(jié)[1-4]。弓網(wǎng)振動(dòng)試驗(yàn)臺(tái)在弓網(wǎng)動(dòng)態(tài)關(guān)系的模擬試驗(yàn)中發(fā)揮著重大作用,為了模擬高速列車(chē)運(yùn)行時(shí)的狀態(tài),弓網(wǎng)試驗(yàn)臺(tái)的振動(dòng)頻率需要達(dá)到100 Hz[5]。在高頻振動(dòng)試驗(yàn)中,正弦運(yùn)動(dòng)信號(hào)是很常見(jiàn)的一種信號(hào)。為了精確重現(xiàn)某一復(fù)合運(yùn)動(dòng),需要不同自由度之間的正弦運(yùn)動(dòng)能精確跟蹤各自的給定信號(hào)[6]。由于電液伺服系統(tǒng)自身固有頻率的限制,以及各種非線性因素的影響,采用傳統(tǒng)PID的位移閉環(huán)控制策略,很難實(shí)現(xiàn)高頻下正弦信號(hào)的精確跟蹤[7-8]。目前對(duì)正弦運(yùn)動(dòng)精確控制的方法主要有變結(jié)構(gòu)控制和自學(xué)習(xí)等[9-10]。張?jiān)忍岢龅幕陬l域的諧波幅相自適應(yīng)控制(HAPAC)方法[6],通過(guò)對(duì)輸入輸出信號(hào)在頻域的諧波辨識(shí)補(bǔ)償,提高了正弦運(yùn)動(dòng)的動(dòng)態(tài)跟蹤性能,不過(guò)該方法需要提前確定系統(tǒng)的初始模型,辨識(shí)速度取決于初始模型的精確程度。Yao和馬建明等提出了基于Widrow-Hoff神經(jīng)網(wǎng)絡(luò)學(xué)習(xí)算法的幅相控制策略[11-12],該控制策略將給定信號(hào)和跟其相位相差90°的信號(hào)以一定的加權(quán)系數(shù)疊加,通過(guò)LMS算法調(diào)整權(quán)值向量,實(shí)現(xiàn)正弦信號(hào)的跟蹤。不過(guò)該算法中初始加權(quán)值和學(xué)習(xí)系數(shù)的選擇容易影響系統(tǒng)的穩(wěn)定性。另外,上述兩種控制策略無(wú)法對(duì)正弦信號(hào)的中心位置偏差進(jìn)行修正。為此,本文基于時(shí)域給出幅相自適應(yīng)控制的改進(jìn)算法、計(jì)算機(jī)實(shí)現(xiàn)方法以及弓網(wǎng)試驗(yàn)系統(tǒng)對(duì)該算法的實(shí)驗(yàn)驗(yàn)證。實(shí)驗(yàn)結(jié)果表明,改進(jìn)幅相控制算法可以有效克服上述傳統(tǒng)控制策略的缺點(diǎn),實(shí)現(xiàn)正弦運(yùn)動(dòng)信號(hào)的精確跟蹤。
1 弓網(wǎng)振動(dòng)試驗(yàn)系統(tǒng)描述
弓網(wǎng)振動(dòng)試驗(yàn)系統(tǒng)主要由3部分組成:外框、中框和內(nèi)框。如圖1所示,外框由兩組伺服電機(jī)和豎直方向的絲桿導(dǎo)軌結(jié)構(gòu)組成,模擬受電弓垂直方向的大幅值低頻運(yùn)動(dòng);中框由兩組伺服電機(jī)和水平方向的絲桿導(dǎo)軌結(jié)構(gòu)組成,模擬受電弓水平方向的運(yùn)動(dòng);內(nèi)框由伺服閥控制的激振缸驅(qū)動(dòng),模擬垂向小幅值高頻振動(dòng)。
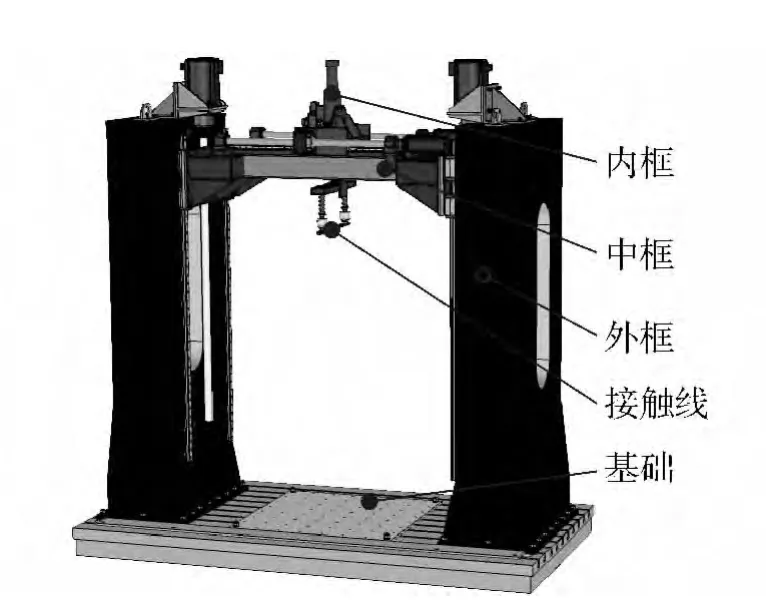
圖1 弓網(wǎng)試驗(yàn)系統(tǒng)Fig.1 Pantograph-catenary test system
外框和中框的工作頻率較低,與內(nèi)框的電液伺服系統(tǒng)相比,伺服電機(jī)沒(méi)有太多的非線性因素影響,因此,外框和中框?qū)o定信號(hào)的跟隨性較好,采用傳統(tǒng)的控制策略就能滿足精度要求。內(nèi)框采用的是液壓驅(qū)動(dòng),需要對(duì)100 Hz的高頻正弦信號(hào)進(jìn)行精確復(fù)現(xiàn)。由于液壓系統(tǒng)頻寬的限制,以及摩擦、死區(qū)、間隙和流量方程等非線性因素的影響,內(nèi)框在運(yùn)行過(guò)程中表現(xiàn)為較強(qiáng)的時(shí)變非線性[13-15]。此外,該試驗(yàn)系統(tǒng)的控制周期為1 ms,而內(nèi)框要求25 Hz正弦運(yùn)動(dòng)時(shí)相位滯后需在5°以內(nèi),即滯后時(shí)間為0.56 ms,小于試驗(yàn)系統(tǒng)的控制周期,傳統(tǒng)的PID前饋控制以及幅相控制策略無(wú)法滿足該精度要求。
2 改進(jìn)幅相自適應(yīng)控制策略
改進(jìn)幅相自適應(yīng)控制模塊主要分為兩個(gè)部分:辨識(shí)和迭代,如圖2所示。理想正弦信號(hào)和反饋正弦信號(hào)通過(guò)辨識(shí)模塊進(jìn)行比較,辨識(shí)出幅值誤差ΔA,相位誤差ΔPhase和中心位置誤差ΔBias,并將結(jié)果輸入迭代模塊。迭代模塊根據(jù)當(dāng)前偏差值對(duì)正弦給定信號(hào)的3個(gè)參數(shù)進(jìn)行迭代修正,使得反饋信號(hào)可以精確跟蹤正弦信號(hào)。
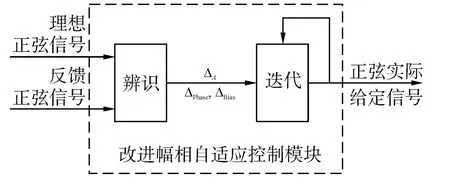
圖2 改進(jìn)幅相自適應(yīng)控制模塊的組成Fig.2 Composition of the MAPAC module
弓網(wǎng)振動(dòng)試驗(yàn)系統(tǒng)下位機(jī)的實(shí)時(shí)運(yùn)行代碼通過(guò)快速原型的方式開(kāi)發(fā)。幅相自適應(yīng)模塊基于Stataflow圖形工具進(jìn)行開(kāi)發(fā)。有限狀態(tài)機(jī)Stataflow在解決復(fù)雜的邏輯問(wèn)題方面很占優(yōu)勢(shì),圖形化的編程方式也更為直觀和簡(jiǎn)潔,且其本身與Simulink之間能實(shí)現(xiàn)無(wú)縫連接。
2.1 辨識(shí)模塊
辨識(shí)模塊的主要作用是找出反饋信號(hào)與理想信號(hào)間的幅值差,相位差和中心位置偏差。顯然,辨識(shí)出這些誤差值,至少需要一個(gè)周期的數(shù)據(jù),因此辨識(shí)模塊的辨識(shí)周期為一個(gè)理想正弦信號(hào)的周期。定義單個(gè)辨識(shí)周期的起始點(diǎn)為理想信號(hào)由下而上穿越中位線時(shí)刻,結(jié)束點(diǎn)為下一次的正向穿越,同時(shí)該結(jié)束點(diǎn)也是下一個(gè)辨識(shí)周期的開(kāi)始點(diǎn),辨識(shí)周期與正弦信號(hào)的周期相同,如圖3所示。
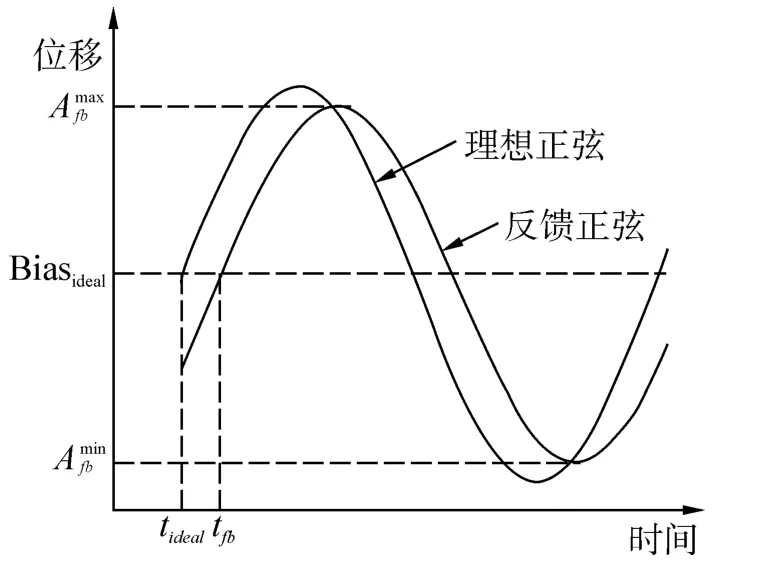
圖3 單個(gè)辨識(shí)周期Fig.3 Single identification period
幅值誤差和中位位置偏差比較容易辨識(shí),幅值誤差和中心位置誤差分別為

式中:Aideal、Biasideal分別為理想正弦信號(hào)幅值和理想中位值,、分別為單個(gè)辨識(shí)周期內(nèi)正弦反饋信號(hào)的最大值和最小值。通過(guò)找到一個(gè)周期內(nèi)正弦反饋信號(hào)的最大值與最小值即可辨識(shí)出幅值誤差和中位誤差。
相位誤差通過(guò)理想正弦信號(hào)正向穿越中位線時(shí)間和反饋信號(hào)的正向穿越中位線時(shí)間之間的差值來(lái)確定。由于系統(tǒng)的采樣及控制周期為1 ms,為了突破控制周期對(duì)相位精度的限制,在穿越前的時(shí)間點(diǎn)與穿越后的時(shí)間點(diǎn)之間進(jìn)行線性插值,來(lái)精確確定穿越時(shí)刻。
理想信號(hào)的穿越時(shí)刻為

式中:tideal為理想信號(hào)的穿越時(shí)刻;為理想信號(hào)穿越后一點(diǎn)的時(shí)刻;分別為理想信號(hào)穿越前后兩點(diǎn)的幅值。反饋信號(hào)穿越時(shí)刻tfb的計(jì)算方法與此類似。
由此可以得到相位滯后為

將相位誤差在π處進(jìn)行如下分段處理:

該處理方式將相位誤差范圍由 [0,2π]調(diào)整至[-π,π],降低了誤差大于π時(shí)所需的相位調(diào)整量。
通過(guò)上面的公式,就可以對(duì)一個(gè)辨識(shí)周期內(nèi)的ΔA、ΔPhase和ΔBias進(jìn)行辨識(shí),實(shí)現(xiàn)該辨識(shí)方法的有限狀態(tài)機(jī)程序如圖4所示。程序中的Loop1部分用來(lái)確定辨識(shí)周期內(nèi)反饋信號(hào)的最大最小值,Loop2部分用來(lái)尋找反饋信號(hào)穿越中心位置的時(shí)間,Loop3部分用來(lái)計(jì)算ΔA、ΔPhase和ΔBias。
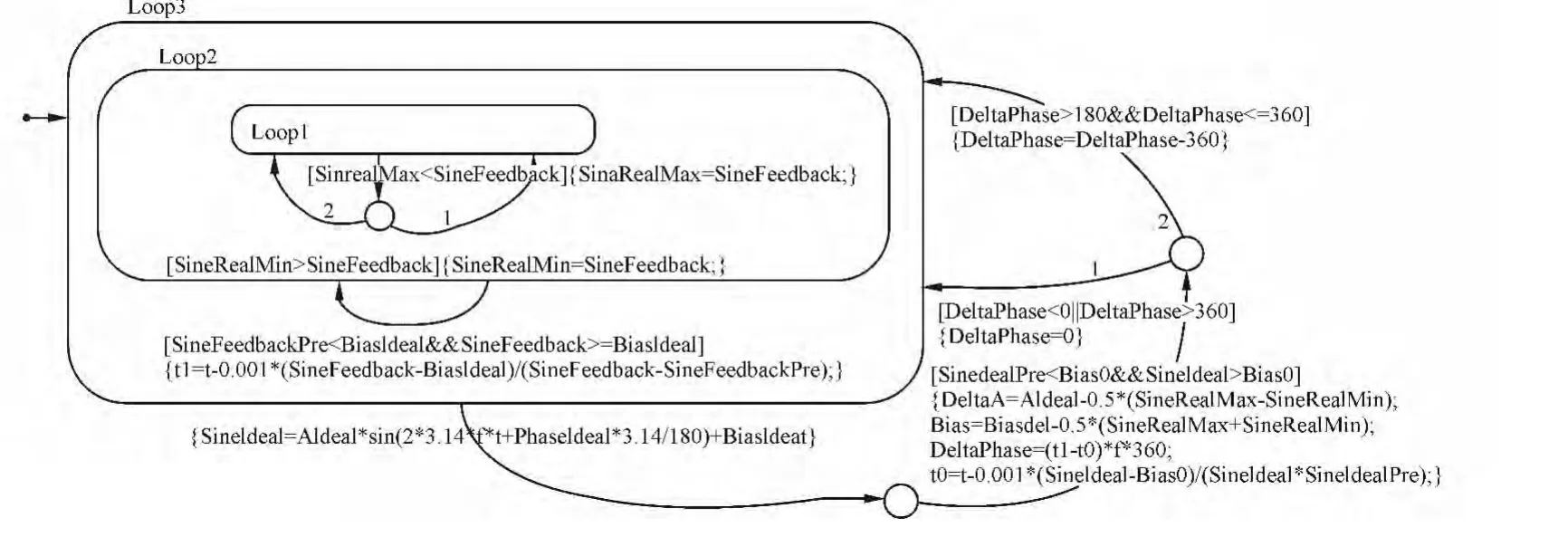
圖4 辨識(shí)模塊的有限狀態(tài)機(jī)程序Fig.4 StataFlow program of identification module
2.2 迭代模塊
迭代模塊主要是根據(jù)辨識(shí)模塊辨識(shí)出的ΔA、ΔPhase和ΔBias,實(shí)時(shí)修正給定信號(hào)的幅值、相位和中心位置。迭代模塊的運(yùn)行周期為系統(tǒng)的控制周期,也就是1 ms。
給定正弦信號(hào)的幅值、相位及中位值的迭代序列分別如下:
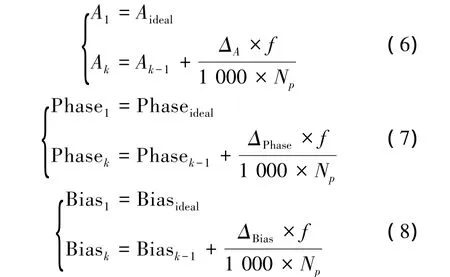
式中:Ak、Phasek和Biask分別為當(dāng)前控制周期內(nèi)正弦給定信號(hào)的幅值、相位和中位值;Ak-1、Phasek-1和Biask-1分別為上一控制周期的幅值、相位和中位值;f為正弦信號(hào)的頻率;Np為迭代調(diào)整周期,即消除當(dāng)前偏差所需要經(jīng)過(guò)的正弦周期數(shù)。
Np的值越大,則收斂速度越慢,需要經(jīng)過(guò)的迭代周期數(shù)越多,時(shí)間越長(zhǎng)。由于MAPAC模塊的辨識(shí)周期為一個(gè)正弦周期,因此迭代調(diào)整周期至少要超過(guò)一個(gè)正弦周期,才能保證系統(tǒng)的收斂性,所以Np的值要大于1。另外考慮到正弦信號(hào)高頻時(shí)的周期很短,如果Np為某一固定值,頻率越大,則迭代時(shí)間會(huì)越短,而此時(shí)幅值衰減和相位滯后也相對(duì)較大,過(guò)短的迭代調(diào)整時(shí)間容易造成系統(tǒng)不穩(wěn)定。因此本文的Np值按如下方式分段選擇:

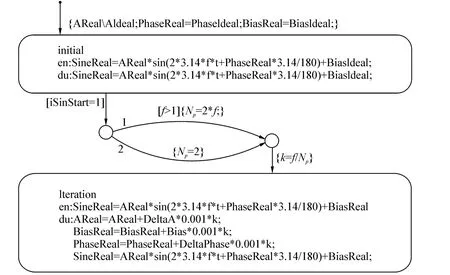
圖5 迭代模塊的有限狀態(tài)機(jī)程序Fig.5 Stateflow program of iteration module
當(dāng)正弦信號(hào)的頻率f在1 Hz以下時(shí),按照兩次正弦周期的迭代時(shí)間進(jìn)行迭代運(yùn)算,當(dāng)頻率f在1 Hz以上時(shí),則變?yōu)楣潭ǖ? s迭代時(shí)間進(jìn)行迭代運(yùn)算。Np的分段選取方式兼顧了控制算法在低頻時(shí)收斂的快速性與高頻時(shí)的穩(wěn)定性。迭代部分的有限狀態(tài)機(jī)程序如圖5所示。
2.3 改進(jìn)幅相自適應(yīng)控制模塊
將辨識(shí)模塊與迭代模塊的程序相結(jié)合,并將有限狀態(tài)機(jī)StataFlow程序嵌入至Simulink中,得到如圖6所示的改進(jìn)幅相自適應(yīng)控制模塊。圖中的iSinStart端口用來(lái)指定系統(tǒng)是否啟用幅相自適應(yīng)控制策略。該幅相控制模塊中僅需要輸入理想正弦信號(hào)的相關(guān)參數(shù)以及正弦反饋信號(hào)即可,無(wú)需額外設(shè)定其他參數(shù),也不需要提前確定系統(tǒng)的初始模型,使用十分便捷。輸出端口為實(shí)際的給定正弦信號(hào),用該信號(hào)作為傳統(tǒng)PID控制策略的輸入值即可實(shí)現(xiàn)幅相控制。
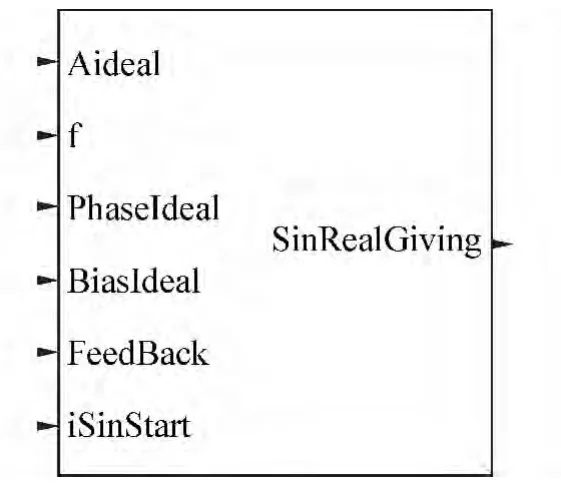
圖6 改進(jìn)幅相自適應(yīng)控制的Simulink模塊Fig.6 Simulik module for MAPAC
3 改進(jìn)幅相自適應(yīng)控制的實(shí)驗(yàn)結(jié)果
為驗(yàn)證本算法在弓網(wǎng)振動(dòng)試驗(yàn)臺(tái)上的實(shí)際控制效果,用NI的PXI8110工控機(jī)對(duì)內(nèi)框的正弦運(yùn)動(dòng)信號(hào)進(jìn)行采樣及實(shí)時(shí)控制,其采樣及控制周期為1 ms。以帶寬為0~150 Hz的隨機(jī)信號(hào)對(duì)系統(tǒng)進(jìn)行激勵(lì),經(jīng)過(guò)頻譜分析,得到采用經(jīng)典PID算法時(shí),內(nèi)框的幅頻特性曲線如圖7所示,幅值衰減為-3 dB時(shí)對(duì)應(yīng)的頻率為 24.9 Hz。
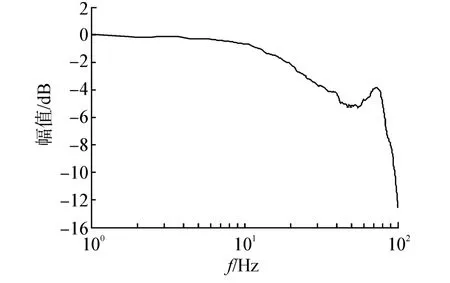
圖7 弓網(wǎng)試驗(yàn)系統(tǒng)內(nèi)框的幅頻特性Fig.7 Amplitude-frequency characteristic of inner frame in pantograph-catenary test system
分別用25 Hz和80 Hz的高頻正弦信號(hào)對(duì)系統(tǒng)進(jìn)行激勵(lì)。不采用MAPAC時(shí),正弦信號(hào)的跟蹤曲線如圖8所示。頻率為25 Hz和80 Hz時(shí),幅值誤差分別為 6.36%和22%,相位滯后分別為 97.2°和300°,與系統(tǒng)要求的正弦精度指標(biāo)相差較大。
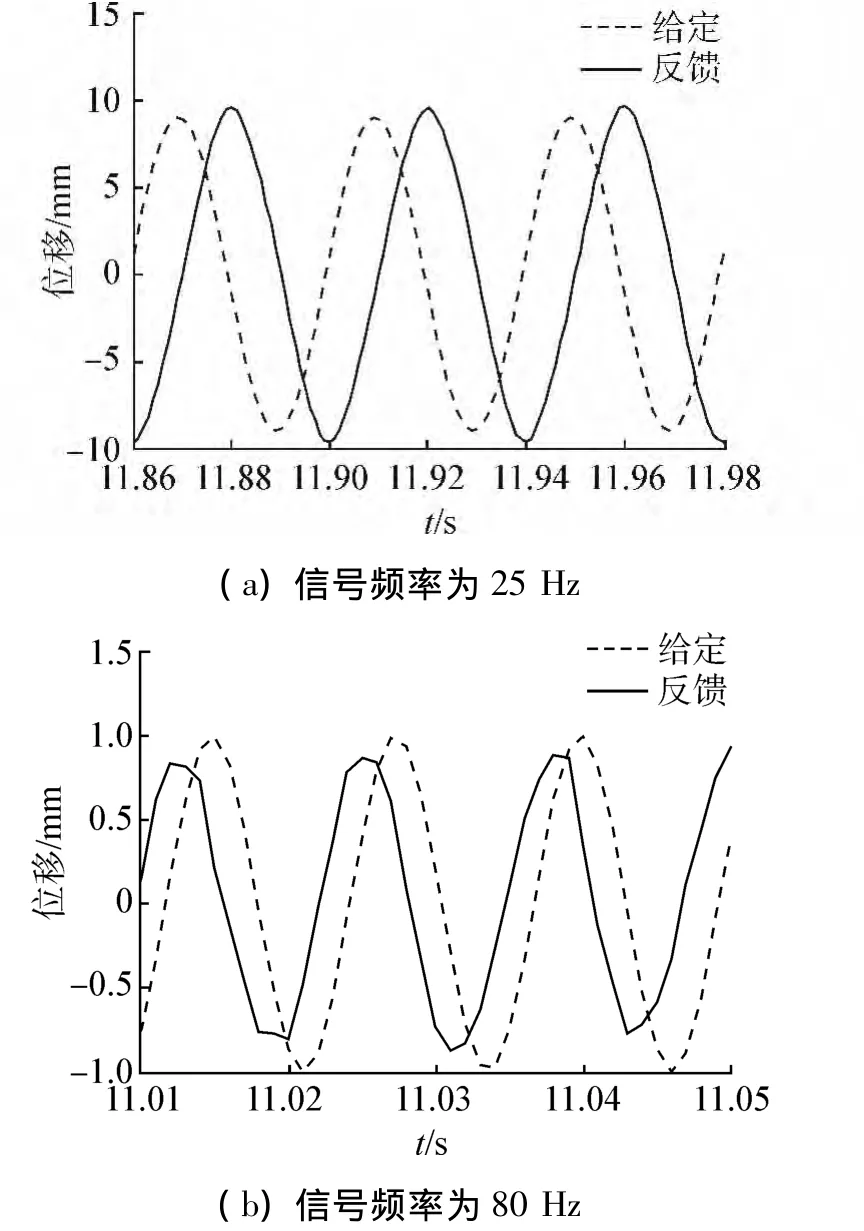
圖8 采用經(jīng)典PID控制策略的實(shí)驗(yàn)曲線Fig.8 Experimental curves under PID control strategy
將MAPAC應(yīng)用于弓網(wǎng)振動(dòng)試驗(yàn)系統(tǒng),采用同樣的正弦進(jìn)行實(shí)驗(yàn),得到正弦實(shí)驗(yàn)跟蹤曲線如圖9所示。25 Hz正弦對(duì)應(yīng)的相位誤差降低為0.36°,中心位置穿越處的相位滯后時(shí)間僅為0.04 ms,突破了系統(tǒng)控制周期帶來(lái)的限制。同時(shí),由于系統(tǒng)采樣周期為1 ms,頻率為80 Hz時(shí),正弦信號(hào)一個(gè)周期內(nèi)僅有不到13個(gè)數(shù)據(jù)點(diǎn),即使在這種情況下,采用MAPAC方法后,依舊可以使反饋信號(hào)以高精度跟蹤理想信號(hào)。由實(shí)驗(yàn)結(jié)果可以看出,采用改進(jìn)的幅相自適應(yīng)控制策略后,系統(tǒng)的正弦跟蹤精度有了很大的提高,遠(yuǎn)遠(yuǎn)超出原先的精度要求。
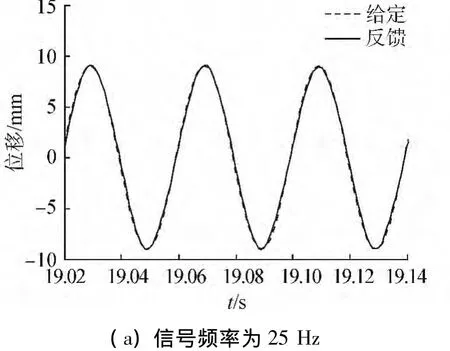
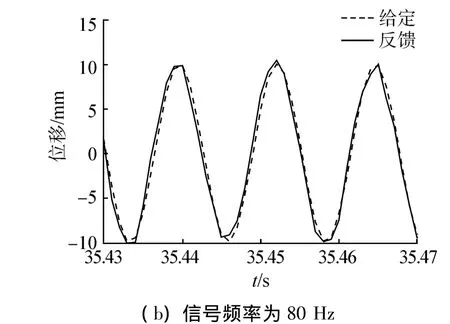
圖9 采用改進(jìn)幅相自適應(yīng)控制的實(shí)驗(yàn)曲線Fig.9 Experimental curves under MAPAC
4 結(jié)論
本文研究了基于時(shí)域的改進(jìn)幅相自適應(yīng)控制策略,并將其應(yīng)用于弓網(wǎng)振動(dòng)試驗(yàn)系統(tǒng)中來(lái)精確跟蹤正弦信號(hào)。
1)在時(shí)域內(nèi)分析了正弦信號(hào)幅值、相位和中心位置的辨識(shí)公式,通過(guò)線性插值,實(shí)現(xiàn)了相位滯后時(shí)間的精確辨識(shí)。對(duì)辨識(shí)誤差進(jìn)行迭代控制,給出了迭代序列,并對(duì)迭代調(diào)整周期進(jìn)行分段設(shè)置,同時(shí)滿足了系統(tǒng)的快速性和穩(wěn)定性的要求。
2)給出了辨識(shí)和迭代部分的StataFlow程序并對(duì)其進(jìn)行了實(shí)驗(yàn)驗(yàn)證,結(jié)果表明,改進(jìn)幅相自適應(yīng)控制策略能有效提高弓網(wǎng)振動(dòng)試驗(yàn)系統(tǒng)的正弦跟蹤精度,同時(shí)還克服了傳統(tǒng)幅相控制設(shè)定參數(shù)繁多、容易發(fā)散以及需要提前確定系統(tǒng)初始模型等缺點(diǎn)。
[1]TELLINI B,MACUCCI M,GIANNETTI R,et al.Linepantograph EMI in railway systems[J].IEEE Instrumentation & Measurement Magazine,2001,4(4):10-13.
[2]WALTERS S,RACHID A,MPANDA A.On modeling and control of pantograph catenary systems[C]//International Conference on Pantograph-catenary Interaction Framework for Intelligent Control.Amiens:Universite de Picardie Jules Verne,2011:54-63.
[3]時(shí)菁,楊志鵬,張文軒,等.關(guān)節(jié)式電分相處的弓網(wǎng)動(dòng)態(tài)特性[J].中國(guó)鐵道科學(xué),2014,35(2):46-51.SHI Jing,YANG Zhipeng,ZHANG Wenxuan,et al.Pantograph-catenary dynamic characteristics of articulated phase insulator[J].China Railway Science,2014,35(2):46-51.
[4]王萬(wàn)崗,吳廣寧,高國(guó)強(qiáng).高速鐵路弓網(wǎng)電弧試驗(yàn)系統(tǒng)[J].鐵道學(xué)報(bào),2012,34(4):22-27.WANG Wangang,WU Guangning,GAO Guoqiang.The pantograph-catenary arc test system for high-speed railways[J].Journal of The China Railway Society,2012,34(4):22-27.
[5]吳學(xué)杰,張衛(wèi)華,揚(yáng)世杰.應(yīng)用于接觸網(wǎng)/受電弓混合模擬試驗(yàn)臺(tái)的計(jì)算機(jī)測(cè)控系統(tǒng)[J].計(jì)算機(jī)工程與應(yīng)用,2002,12:213-216.WU Xuejie,ZHANG Weihua,YANG Shijie.The computer control and measure system applied to the pantograph/catenary mixed dynamic simulation system[J].Computer Engineering and Applications,2002,12:213-216.
[6]張?jiān)瑮钜粭潱R智周.三軸轉(zhuǎn)臺(tái)諧波幅相自適應(yīng)控制系統(tǒng)的設(shè)計(jì)[J].南京航空航天大學(xué)學(xué)報(bào),2004,36(5):619-622.ZHANG Yuansheng,YANG Yidong,MA Zhizhou.Design of harmonic amplitude-phase adaptive control system in three-axis turntables[J].Journal of Nanjing University of Aeronautics& Astronautics,2004,36(5):619-622.
[7]MERRITT H E.Hydraulic control systems[M].New York:John Wiley& Sons,1967:68-70.
[8]STOTEN D P,SHIMIZU N.The feedforward minimal control synthesis algorithm and its application to the control of shaking-tables[J].Proceedings of the Institution of Mechanical Engineers.Part I:Journal of Systems and Control Engineering,2007,221(3):423-444.
[9]SHIN K.Adaptive control of active balancing systems for speed-varying rotating machinery[D].(s.l.):Library of U-niversity of Michigan,2001:113-120.
[10]WEN Haoping.Design of adaptive and basis function based learning and repetitive control[D].New York City:Library of Columbia University,2001:87-92.
[11]馬建明,黃其濤,叢大成.幅相控制策略在六自由度運(yùn)動(dòng)模擬器中的應(yīng)用[J].哈爾濱工程大學(xué)學(xué)報(bào),2008,29(11):1217-1221.MA Jianming,HUANG Qitao,CONG Dacheng.Application of the amplitude-phase control strategy in a 6-DOF motion simulator[J].Journal of Harbin Engineering University,2008,29(11):1217-1221.
[12]YAO Jianjun,DI Duotao,JIANG Guilin,et al.Acceleration amplitude-phase regulation for electro-hydraulic servo shaking table based on LMS adaptive filtering algorithm[J].International Journal of Control,2012,85(10):1581-1592.
[13]PLUMMER A R.A detailed dynamic model of a six-axis shaking table[J].Journal of Earthquake Engineering,2008,12(4):631-662.
[14]STEFANO P,RICCARDO R,SALVATORE S,et al.Non-linear modelling and optimal control of a hydraulically actuated seismic isolator test rig[J].Mechanical Systems and Signal Processing,2013,35(2):255-278.
[15]李洪人.液壓控制系統(tǒng)[M].北京:國(guó)防工業(yè)出版社,1990:55-58.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25