基于改進(jìn)魚(yú)群尋優(yōu)算法的天線陣方向圖綜合
2015-08-10 10:30:20玄曉波姚鳳薇
電子設(shè)計(jì)工程 2015年22期
黃 勇,玄曉波,姚鳳薇,曹 揚(yáng)
(上海無(wú)線電設(shè)備研究所 上海 200090)
在雷達(dá)和通訊等領(lǐng)域中,經(jīng)常需要對(duì)陣列天線方向圖進(jìn)行特殊賦形設(shè)計(jì)。根據(jù)賦形條件求解出陣列的單元數(shù)目、空間排布、幅度相位分布等參數(shù)的過(guò)程,即為綜合。陣列綜合是一個(gè)復(fù)雜的多維非線性?xún)?yōu)化問(wèn)題。當(dāng)目標(biāo)方向圖比較復(fù)雜或者存在較多約束條件時(shí),切比雪夫、泰勒等經(jīng)典的解析方法就難以進(jìn)行有效求解[1-2],需要突破常規(guī)發(fā)展一種新的實(shí)現(xiàn)方法。
智能優(yōu)化算法在解決全局性多目標(biāo)優(yōu)化問(wèn)題時(shí)具有良好的適用性。近年來(lái),在智能算法領(lǐng)域出現(xiàn)了一系列新穎算法,并作為解決傳統(tǒng)復(fù)雜問(wèn)題的一種新興演化計(jì)算技術(shù)迅速成為了國(guó)內(nèi)外的研究熱點(diǎn)。目前,遺傳算法[3-4]、差分進(jìn)化算法[5]和粒子群優(yōu)化算法[6]等智能算法已被應(yīng)用到了天線領(lǐng)域,尤其是在陣列天線的優(yōu)化設(shè)計(jì)方面。常規(guī)的智能優(yōu)化算法雖然在深零陷生成和低旁瓣抑制上取得了良好的效果,但對(duì)于有著多零點(diǎn)和低旁瓣等多約束條件的陣列天線進(jìn)行綜合時(shí)仍難以避免早熟,易陷入局部收斂。
誕生于2002年的魚(yú)群算法一種新穎的群體智能算法[7-8],通過(guò)虛擬實(shí)現(xiàn)生物的視覺(jué)感官功能,模擬魚(yú)類(lèi)的覓食、群聚、追尾、隨機(jī)等生物行為在搜索域中進(jìn)行尋優(yōu),很適合解決天線陣列綜合等復(fù)雜的多維非線性?xún)?yōu)化問(wèn)題。針對(duì)傳統(tǒng)算法容易陷入局部收斂的不足,本文提出了一種改進(jìn)的魚(yú)群尋優(yōu)算法,將混沌優(yōu)化算法和人工魚(yú)群算法進(jìn)行了結(jié)合,并將人工魚(yú)的視野范圍和步進(jìn)設(shè)置成了動(dòng)態(tài)調(diào)整,首次成功地將其應(yīng)用于陣列天線方向圖綜合中,通過(guò)仿真驗(yàn)證了新算法的有效性。
1 改進(jìn)的魚(yú)群尋優(yōu)算法簡(jiǎn)介
1.1 原始魚(yú)群算法
人工魚(yú)群算法通過(guò)模擬魚(yú)群的覓食、聚群、追尾、隨機(jī)等行為,且這些行為隨機(jī)進(jìn)行著互相轉(zhuǎn)換,利用魚(yú)群間的相互協(xié)作來(lái)找尋出問(wèn)題最優(yōu)解[7]。以求解極大值為例,假定魚(yú)所在位置的食物濃度為f(X),魚(yú)群算法的簡(jiǎn)要流程如圖1所示。
1.2 改進(jìn)的魚(yú)群尋優(yōu)算法
1.2.1 復(fù)合混沌映射
初始魚(yú)群的個(gè)體分布狀況直接影響著智能算法的計(jì)算準(zhǔn)確性和全局收斂性。若初始魚(yú)群分布性差,將導(dǎo)致算法收斂速度緩慢,甚至不收斂。在無(wú)法預(yù)知最優(yōu)解存在區(qū)域的情況下,初始魚(yú)群應(yīng)盡可能地分散分布。混沌是一種普遍存在的非線性現(xiàn)象,混沌搜索具有內(nèi)在隨機(jī)性、初值敏感性、遍歷性等特點(diǎn)。為確保初始魚(yú)群的多樣性,利用混沌序列來(lái)彌補(bǔ)智能算法初始值較隨機(jī)的不足,借鑒文獻(xiàn)[9]的思想,魚(yú)群的初始化分別采用Logistic序列和Tent序列,其表達(dá)式分別如下式(1)、(2)所示:
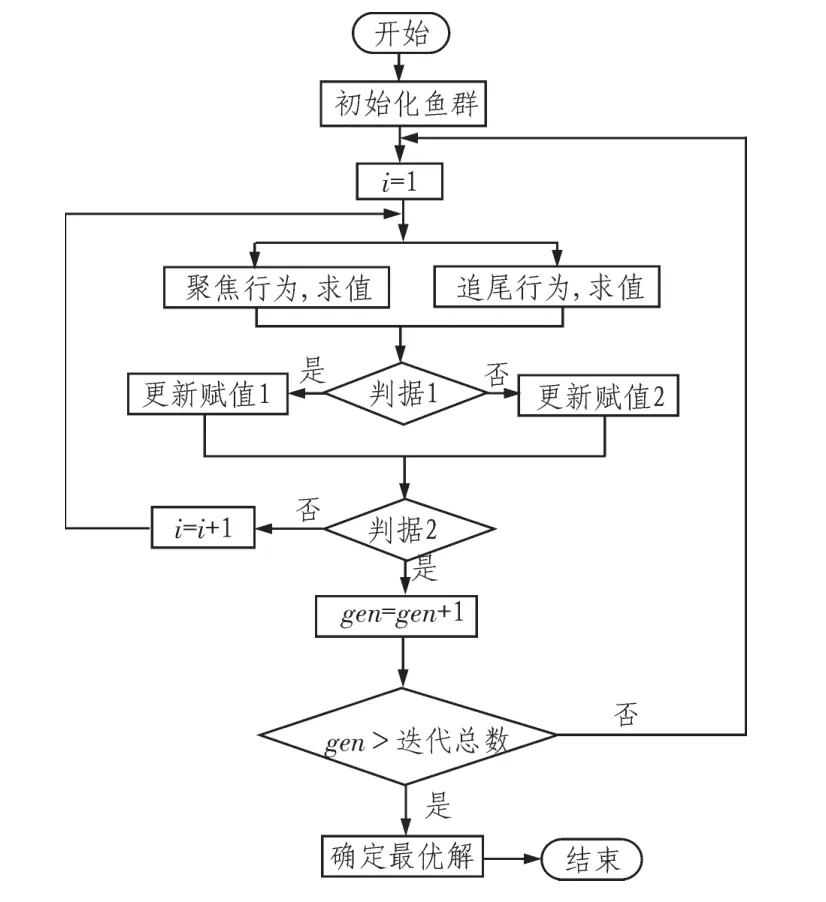
圖1 人工魚(yú)群算法流程圖Fig.1 Flowchart of artificial fish swarm algorithm
1.2.2 視野的動(dòng)態(tài)調(diào)整
由群體智能算法的空間搜索機(jī)制可知,群體智能算法在計(jì)算早期應(yīng)該著重于全局搜索,以保證較快的收斂速度和更廣的搜索范圍;在計(jì)算后期則應(yīng)該著重于精細(xì)的局部搜索,實(shí)行局部搜索,以提高算法的求解精度。為符合Logistic模型的變化規(guī)律,借鑒粒子群算法中將慣性權(quán)重設(shè)置成動(dòng)態(tài)變化的方法[9],將魚(yú)群算法中的視野范圍也設(shè)置成動(dòng)態(tài)變化的,其表達(dá)式如式(3)所示。

式中,k為迭代次數(shù);vs為初始視野范圍;ve為迭代至最大次數(shù)時(shí)的視野范圍;M為最大迭代次數(shù)。隨著迭代不斷進(jìn)行,視野范圍v最近收斂于ve。
1.2.3 步進(jìn)的動(dòng)態(tài)調(diào)整
個(gè)體魚(yú)移動(dòng)步進(jìn)越大,個(gè)體向最優(yōu)位置靠近的速度越快,若在算法的早期采用較大的步進(jìn),收斂速度就越快,跳出局部最優(yōu)的能力也就越強(qiáng);反之,如果在算法的早期采用較小的步進(jìn),搜索范圍小,收斂速度慢,且易陷入局部最優(yōu)。同理,在算法的后期,在最優(yōu)解搜索大致范圍已確定的條件下,若采用較小的步進(jìn),可以提高算法的求解精度。動(dòng)態(tài)步進(jìn)的表達(dá)式為

式中,k為迭代次數(shù);steps為初始步進(jìn);stepe為迭代至最大次數(shù)時(shí)的步進(jìn);a為衰減率。
2 陣列方向圖綜合
對(duì)于由N個(gè)理想點(diǎn)源組成的直線陣,以陣列的第一個(gè)單元為空間位置參考點(diǎn),在不考慮單元之間耦合的條件下,天線陣列的遠(yuǎn)場(chǎng)方向圖可表示為

式中,θ為空間輻射角,k為波數(shù),dn為從第n個(gè)單元到第一個(gè)單元的距離(波長(zhǎng)的倍數(shù)),An和an分別表示第n個(gè)單元的幅度和相位。
利用切比雪夫、泰勒等經(jīng)典方法來(lái)實(shí)現(xiàn)超低副瓣綜合存在著各種限制,需要突破常規(guī)發(fā)展一種新的方法。魚(yú)群算法是通過(guò)虛擬實(shí)現(xiàn)生物的視覺(jué)感官功能,在搜索域中進(jìn)行動(dòng)態(tài)尋優(yōu),具有對(duì)初值不敏感、全局漸進(jìn)收斂等優(yōu)點(diǎn),很適合用以天線方向圖綜合等復(fù)雜的多維非線性?xún)?yōu)化問(wèn)題。用改進(jìn)魚(yú)群算法綜合方向圖的目的就是根據(jù)波束形狀來(lái)求解陣列天線的激勵(lì)幅度、相位和單元間距。適應(yīng)度函數(shù)的設(shè)計(jì)是算法的關(guān)鍵,它的好壞直接決定了優(yōu)化效果,它必須根據(jù)具體問(wèn)題進(jìn)行具體設(shè)計(jì)。對(duì)應(yīng)線性陣列的綜合,適應(yīng)度函數(shù)采用文獻(xiàn)中論述過(guò)的適應(yīng)度函數(shù)[7]:

式中,MSLL和SLLdes為計(jì)算最大相對(duì)旁瓣電平和目標(biāo)旁瓣電平;NULLθr是計(jì)算目標(biāo)位置 θγ的零陷,NULLdes_θr是相應(yīng)位置零陷深度值;NULL-STD表示多個(gè)零陷的方差,這是為了克服僅使用最高零陷深度作為優(yōu)化項(xiàng)而導(dǎo)致的零陷不均衡現(xiàn)象;α、β和γ是各項(xiàng)指標(biāo)的權(quán)值,T是需控制零陷深度的零陷總數(shù)。
采用20個(gè)天線單元組成的均勻直線陣來(lái)驗(yàn)證魚(yú)群算法是否適合超低副瓣綜合。所有單元相位相同,單元間距為0.6γ,副瓣低于-40 dB,所有的零陷深度不低于-70 dB,主瓣波束寬度不大于18°。綜合所得的方向圖和電流分布分別如圖2和圖3所示,魚(yú)群算法尋優(yōu)所得的最優(yōu)方向圖的各項(xiàng)指標(biāo)參數(shù)均優(yōu)于目標(biāo)值。對(duì)魚(yú)群算法和切比雪夫兩種方法的綜合效果進(jìn)行了對(duì)比,相對(duì)于近似的電流分布,在波束寬度等大的條件下,通過(guò)魚(yú)群算法綜合所得的方向圖副瓣更低。
魚(yú)群算法除了可以實(shí)現(xiàn)超低副瓣方面外,還可以在副瓣、副瓣間差異、波束寬度、零陷等指標(biāo)需要滿(mǎn)足一定約束條件時(shí)對(duì)一特定角度范圍內(nèi)的副瓣進(jìn)行抑制。若優(yōu)化條件為所有單元相位相同,單元間距為0.6λ,副瓣低于-35 dB,主瓣波束寬度不大于 18°,30°~40°波束范圍內(nèi)的副瓣低于-70 dB,綜合所得的方向圖如圖4所示。從圖4可以看出,線陣方向圖的副瓣和特定區(qū)域的零陷均達(dá)到了優(yōu)化指標(biāo)要求。
除了能實(shí)現(xiàn)常規(guī)的方向圖外,魚(yú)群算法還能實(shí)現(xiàn)特殊波束的賦形設(shè)計(jì),如圖5所示的余割波束賦形。進(jìn)行此類(lèi)賦形設(shè)計(jì)時(shí),適應(yīng)度函數(shù)一般選取賦形區(qū)、旁瓣區(qū)的目標(biāo)函數(shù)和綜合所得方向圖兩者間偏差的均方差來(lái)進(jìn)行賦形設(shè)計(jì)。
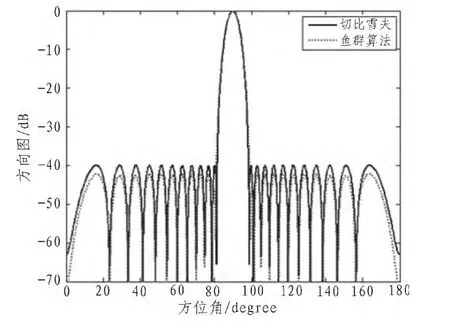
圖2 20陣元均勻線陣歸一化方向圖Fig.2 Normalized power pattern for 20 elements with the same interelement spacing
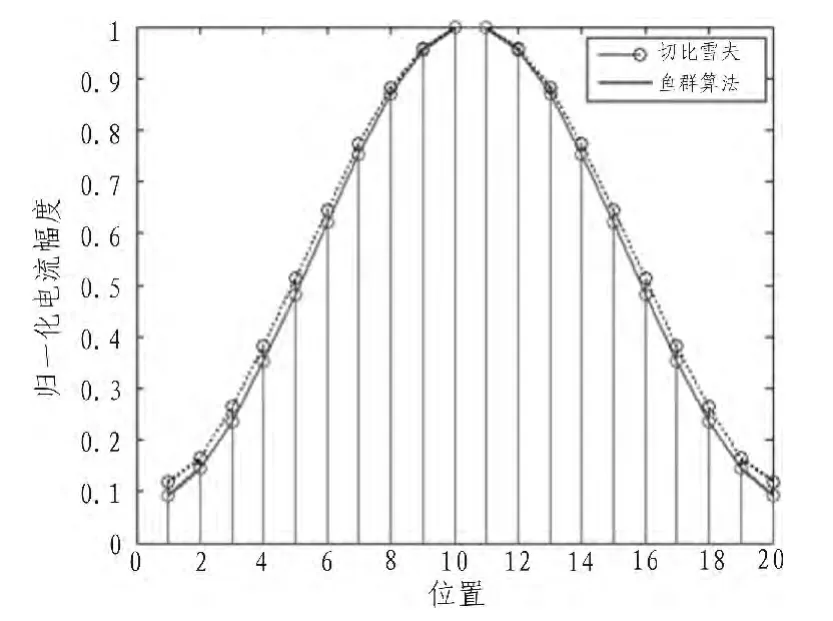
圖3 陣列歸一化電流分布圖示Fig.3 Normalized current value of the array
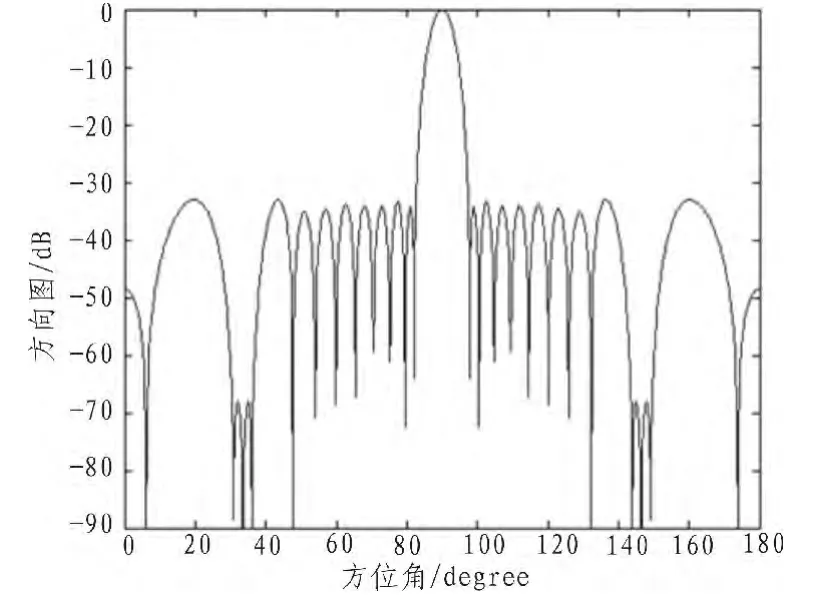
圖4 30°~40°范圍內(nèi)具有低副瓣的方向圖Fig.4 The pattern with low side-lobe between 30°to 40°
綜上,通用魚(yú)群尋優(yōu)算法來(lái)實(shí)現(xiàn)超低副瓣抑制、零陷控制和特殊波束賦形設(shè)計(jì)是可行的,且比傳統(tǒng)方法效果更優(yōu),運(yùn)算的時(shí)效較傳統(tǒng)算法有大幅度提升。
3 結(jié)束語(yǔ)
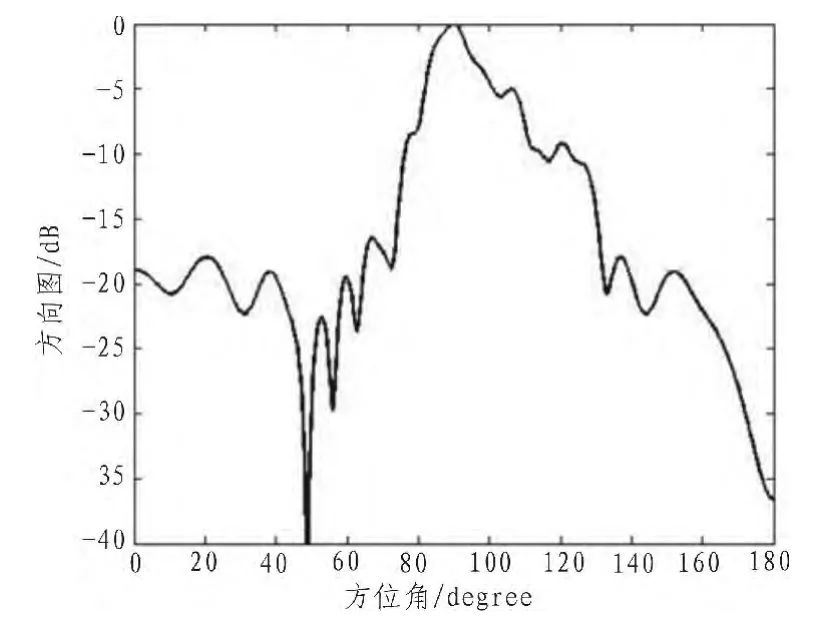
圖5 余割平方波束賦形Fig.5 The pattern of Csc beam
針對(duì)傳統(tǒng)智能算法在實(shí)現(xiàn)陣列方向圖綜合中存在早熟收斂,易陷入局部極值的缺陷,本文介紹了一種可以進(jìn)行低副瓣抑制和波束賦形的新方法,即改進(jìn)的魚(yú)群算法。該算法將混沌算法和魚(yú)群算法相結(jié)合,采用混沌序列初始化魚(yú)群,以提高種群的多樣性和搜索的遍歷性,有效地避免了早熟收斂。為了在將算法早期的全局搜索和算法后期的精細(xì)局部搜索有機(jī)結(jié)合起來(lái),借鑒粒子群算法中的動(dòng)態(tài)慣性權(quán)重方法,將人工魚(yú)的移動(dòng)步進(jìn)和視野范圍均設(shè)置成動(dòng)態(tài)變化的,以滿(mǎn)足Logistic模型的變化規(guī)律。
為了驗(yàn)證算法的實(shí)用性和有效性,利用其進(jìn)行陣列天線方向圖綜合和波束賦形設(shè)計(jì)。工程實(shí)例表明,該算法在解決多參數(shù)、非線性的復(fù)雜問(wèn)題時(shí)具有良好的適用性。
[1]Robert C Hansen,Deng P.No-uniformly spaced super directive antenna arrays patel[J].IEEE, Antenna Array,2002,38(12):131-135.
[2]Warnick,Jensen.Antennas and propagation for wireless communications[J].IEEE Transition on Antennas and Propagation,2001,49(13):32-39.
[3]王宏建,高本慶,劉瑞祥.基于遺傳算法的單脈沖陣列天線優(yōu)化[J].中國(guó)科學(xué)工程,2002,4(5):84-87.
[4]范瑜,金榮洪.基于一種新的遺傳算法的天線方向圖綜合技術(shù)[J].電波科學(xué)學(xué)報(bào),2004,19(2):182-186.
[5]謝歡歡,楊伯朝.基于差分進(jìn)化算法的陣列天線波束賦形研究[J].現(xiàn)代導(dǎo)航,2012,6(3):219-224.
[6]齊美清,汪偉,金謀平.基于粒子群算法的天線陣方向圖優(yōu)化[J].現(xiàn)雷達(dá)科學(xué)與技術(shù),2008,6(3):231-234.
[7]王培崇,雷鳳均,錢(qián)旭.改進(jìn)人工魚(yú)群算法及其收斂性分析[J].科學(xué)技術(shù)與工程,2013,13(3):616-620.
[8]李曉磊,錢(qián)積新.基于分解協(xié)調(diào)的人工魚(yú)群優(yōu)化算法研究[J].電路與系統(tǒng)工程,2003,8(1):1-6.
[9]劉建霞,李楠,謝克明.改進(jìn)的思維進(jìn)化算法在陣列天線綜合中的應(yīng)用[J].測(cè)試技術(shù)學(xué)報(bào),2009,23(4):331-336.
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
計(jì)算機(jī)應(yīng)用(2022年2期)2022-03-01 12:33:42
計(jì)算機(jī)應(yīng)用(2022年1期)2022-02-26 06:57:42
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
計(jì)算機(jī)應(yīng)用(2021年4期)2021-04-20 14:06:36
計(jì)算機(jī)應(yīng)用(2021年3期)2021-03-18 13:44:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
計(jì)算機(jī)應(yīng)用(2021年1期)2021-01-21 03:22:38
