多點定位場面監視雷達信號處理方法研究
2015-08-10 05:23:46顏波濤
艦船電子對抗 2015年6期
顏波濤,周 喃
(中國電子科技集團公司第38研究所,合肥230088)
0 引 言
多點定位機場場監雷達通過接收民航飛機應答脈沖信號探測目標的空間位置,提供機場地面及附近空域中各目標的位置,實現機場區對飛機的精確定位和識別,改善繁忙機場的場面監視能力,提高機場的安全性[1]。信號處理是整個雷達系統的核心——如何正確捕捉應答信號脈沖串,解決到達時間(TOA)高精度的測時,并進行目標定位解算是實現多點定位的關鍵。
1 多點定位場監雷達定位原理
多點定位機場場監雷達是通過布置在機場附近的各傳感器(遠端單元)捕獲飛機(車輛)的應答信號,各遠端站利用捕獲到的飛機應答脈沖信號進行脈沖串檢測、應答信號解碼,測量出各站接收到應答信號的到達時間,并將檢測到的應答信號到達時間和應答碼送至中心站匹配,利用多站TOA解算出目標的具體位置[2-3],定位技術原理圖見圖1。
2 信號處理設計實現
多點定位機場場監雷達信號處理分系統分為信號處理A(遠端站)與信號處理B(中心站)2個部分實現。

圖1 多站TOA時差定位技術原理圖
2.1 遠端站信號處理實現方法
遠端站需要完成應答信號脈沖檢測、框架檢測、去混疊處理、解碼,脈沖TOA測量、目標數據包處理等功能[4]。
遠端站的功能框圖如圖2所示。

圖2 遠端站信號處理系統功能框圖
2.1.1 脈沖檢測模塊設計
應答碼是一串脈沖信號,信號處理的首要環節就是把接收到的應答信號形成滿足脈沖特性的脈沖信號。各個站點分布處于不同地點,接收機也是獨立的,信號強弱不等,為保證前后沿統一,需要分析脈沖前后沿特性。圖3中橫向為時間,單位0.05 μs;縱向為線性幅度,歸一化值為1。

圖3 脈沖信號與經過低通系統后的波形對比
由圖3可見,前、后沿在采集脈沖信號均值的0.5的位置。對于對數信號,前后沿位置為比脈沖幅度小6dB的位置。選取適當的固定門限加噪聲門限,大于門限認為1,否則為0。脈沖檢測時采用滑窗檢測法,滿足N/M準則,則認為是脈沖信號。若脈沖過寬,則認為是干擾信號(如雷達脈沖信號或電臺信號的諧波),予以剔除。
2.1.2 框架檢測與解碼
當飛機上的應答機收到二次雷達地面站的詢問信號后,就根據詢問模式自動回答一串脈沖,這串脈沖稱為應答碼。應答碼由16個信息碼位組成,這些碼位的代號依次是 F1、C1、A1、C2、A2、C4、A4、X、B1、D1、B2、D2、B4、D4、F2和SPI,每個碼位都有2種狀態,即:有脈沖或無脈沖,有脈沖時為“1”,無脈沖時為“0”。F1與F2的0.5電平處的脈沖前沿間隔為20.3±0.1μs,稱為框架脈沖,它們是二次雷達應答信號的標志脈沖,均恒為“1”狀態。X位是備用狀態,恒為“0”。2個框架脈沖(F1與F2)之間的12個信息碼位C1、A1、C2、A2、C4、A4、X、B1、D1、B2、D2、B4、D4為信息碼,可以編成4 096個獨立的應答碼。
正常情況下,2個框架脈沖的間隔為20.3±0.1μs,因此,一個框架就認為2個前沿間有404~408個時鐘周期(20MHz抽樣頻率)。在本系統中,框架脈沖的檢測是根據比較延時的前沿與非延時情況下的重合情況,延時的前沿對應于框架脈沖F1,非延時的前沿對應脈沖F2,F1相對于F2延時20.3μs,由于F2相對于F1有5個時鐘脈沖的變化范圍,F2與F1的前沿延時404~408個時鐘周期的任一個對齊,都認為是一個正確的框架。

圖4 應答信號組成

圖5 20MHz采樣真實應答信號
當一個正確的框架被檢測到,接下來的任務就是檢測此次應答碼的內容,解碼過程依據每個應答碼間的距離都是1.45μs,比較相對于框架脈沖可能出現應答碼的位置上的幅度值與框架脈沖幅度之間的差值,若超出一定的幅度范圍則應答碼為0,否則為1。考慮到每個應答碼與框架脈沖間的距離有一定的容許誤差,在距框架脈沖相應的應答碼出現的位置上,提前或延后一個時鐘周期都認為是正確的應答碼的位置。
2.1.3 應答碼混疊處理
在機場場面監視中,由于可能有多架飛機且相距較近,其應答信號幾乎同時響應而使系統的接收信號發生混疊。對于混疊,考慮2種情況:一種為碼元不混疊,只是碼元(脈沖)交替出現,即碼元時間間隔不是1.45μs,這個可以通過判別碼元時間間隔即可知道;另一種為碼元脈沖混疊,即脈沖寬度比0.45μs要大。因此,通過脈沖前后沿的時間差來識別碼元脈沖是否交疊[5-6]。
當發現收到的一脈沖串存在混疊現象時,其解碼就不能按照不混疊的情況處理,否則可能有誤。
首先,判斷框架脈沖第1個脈沖是否有交疊。
若沒有(即時間間隔0.6μs以上,等效距離間隔180m以上),則對其以后的脈沖處理,按照前沿(th+0.1+1.45*n)μs采樣,后沿(tb-0.1+1.45*n)μs采樣,n=1,…,14。若二者一致,則該碼元信息提取無誤。不同時,優選信息狀態為“0”,因為2個應答信號的脈沖(“1”狀態)接收后相當于“或”邏輯。為脈沖且脈寬為0.45μs時,則質心估計時刻可用。0.1μs的偏差主要是防止前后沿的檢測偏差,因此,兩目標的定位分辨時間間隔大于0.2 μs,即120m。
若交疊,則說明兩目標相距很近,可以分別以前后沿處理2批目標信息碼。為避免框架脈沖檢測時因第1個脈沖存在交疊,造成框架丟失或編碼判斷不準確,可以在單次脈沖檢測時即對脈沖寬度進行判斷,如若脈沖寬度大于0.45μs,則該脈沖可能存在混疊。對于混疊的脈沖,可以利用脈沖寬度及其前后沿特性對脈沖進行切分,將1個混疊脈沖分離為2個獨立脈沖(如圖6)。脈沖A前沿即以混疊脈沖前沿為前沿,后沿為混疊脈沖前沿(th+0.45μs)。脈沖B前沿以混疊脈沖后沿(tb-0.45μs)為前沿,后沿即為混疊脈沖后沿。

圖6 混疊脈沖切分示意圖
用以上方法處理2個目標應答碼混疊時,信息碼解碼一般不會出現問題。為了防止信息碼解碼時的誤碼,要求后端空間定位時間匹配時,對信息碼不要求所有位匹配,否則多目標混疊導致解碼錯誤,將出現無解或空間定位錯誤。這一點要從工程實際允許應答信號混疊嚴重程度去要求,在目標定位漏警和虛警中尋求平衡。
處理中,為了方便中心站應答信號匹配處理,混/不混疊應答信號等建立不同標記,以示不同的TOA信用標志。
2.1.4 高精度脈沖TOA測量
精確測量應答信號的到達時間以滿足多點定位的需要是機場場面高精度綜合監視系統的技術難點之一。本系統設計出了適應系統工程化的自適應門限檢測方法、差值測時法、多點數據綜合測時法的優化解決方案,解決了多點定位系統到達時間測量對脈沖幅度的偶合作用,使測時精度更好地滿足系統對目標精確定位的要求[7]。
(1)自適應門限檢測法
為了解決各遠端基站因接收到脈沖幅度不同,而引起固定門限帶來的脈沖到達時間測量誤差,考慮采用自適應門限的方法提高測時精度,即采用脈沖幅度的固定比例為門限,確定脈沖到達時間。由圖7可以看出,即使脈沖幅度不同,脈沖幅度的固定比例時間仍在同一時間點t上,脈沖到達時間測量不受脈沖幅度的影響。

圖7 輸入正交信號的自適應門限檢測示意圖
以上方法適用于輸入IQ信號時的門限檢測。由于本系統輸入信號為求模取對數后的幅度信號,脈沖幅度的固定比例為門限的檢測方法即轉化為脈沖幅度降固定數值為門限,如圖8所示。

圖8 輸入模對數值的自適應門限檢測示意圖
(2)差值法到達時間測量
由以往脈沖到達時間測量分析可知,采用逐次臨近法選取與幅度均值接近的幅度時間偏差來獲得脈沖到達時間偏差,所得到達時間測量精度為10ns,且會引起2.89ns的量化誤差。為了避免量化誤差對本系統定位精度上的影響,滿足到達時間測量精度為1ns的系統精度要求,可采用差值測時法計算脈沖偏差時間。
脈沖上升沿差值測時方法可以近似于梯形進行運算。如圖9所示,假設過門限脈沖頂端幅度均值減去固定差值所獲得的脈沖前沿時刻幅度為S-,脈沖前沿時刻t落于采樣點時刻t1、t2之間,A1、A2為t1、t2時刻的100M 采樣幅度值,A1<S-<A2,則:

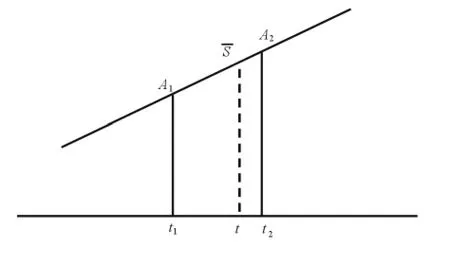
圖9 差值法到達時間測量示意圖
由式(1)可得脈沖前沿時刻t:

采用差值測時的方法,解決了逐次臨近法帶來的量化誤差,進一步提高了單站到達時間測時精度(1ns)。
另外還有多點數據綜合測時法,由于篇幅所限,本文就不一一介紹。
2.2 中心站信號處理實現方法
中心站主要實現各遠端站點的編碼匹配處理、多點定位處理等功能。
中心站的功能框圖如圖10所示。
遠端站通過各通道將實時應答信號解碼信息及時間信息TOA送入中心站數字信號處理器(DSP)進行編碼匹配處理,匹配后獲得來自同一個目標的應答信號及TOA等信息組合送目標解算計算機,解算目標位置。
2.2.1 多站匹配軟件實現
中心站多站匹配軟件在一片DSP中實現,軟件采用結構化設計方法,總體結構設計由解應答數據包、多站目標信息匹配、生成目標數據包軟件單元組合組成。其中,多站目標信息匹配軟件單元組合由匹配鏈表操作、目標信息匹配、提取匹配目標信息3個軟件單元組成。軟件單元組成如圖11所示。
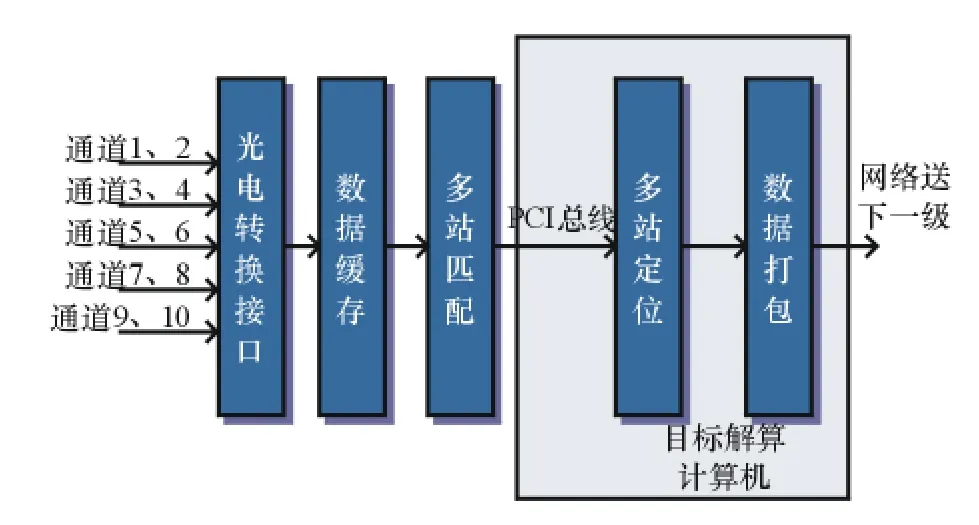
圖10 中心站信號處理系統原理框圖
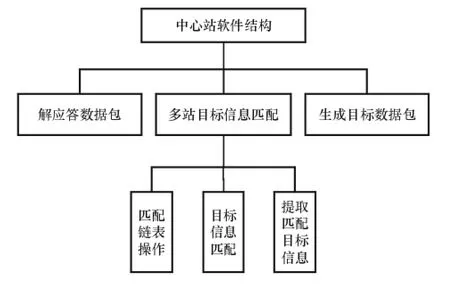
圖11 中心站軟件單元組成框圖
2.2.2 多點定位算法
當中心站獲取了各站到達時間,則只要通過空間三維方程求解即可,因此只要滿足4個站點即可定位目標的三維空間位置(x,y,z),則:

由于實際不能獲得當前應答信號從目標到各站的TOA傳播時間,只是獲得脈沖到達的時刻,因此由時間差信息可組成3個方程的方程組[8]:
在目標計算機中,只要解算該方程組,即可獲得目標空間位置。這就是多點定位的基本思想,也是多點定位場監雷達監視系統的關鍵內容。
3 測試結果
本系統可通過車載應答模擬器模擬飛機發出真實的應答信號,對整個信號處理結果進行測試。在實驗場中搭建5個遠端站(接收站),如圖12所示,利用GPS測得各遠端站點具體坐標位置。定位測試時,按一定軌跡推動車載應答器,其發出的應答信號經過信號處理后在終端畫面上形成圖中運動目標的圓形軌跡,經數據分析該系統定位誤差小于2m。

圖12 車載應答模擬器運行軌跡
[1]張睿,孔金鳳.機場場面監視技術的比較及發展[J].中國西部科技,2010(4):34-35.
[2]陸炫.淺析基于廣域多點相關定位的監視新技術[J].北京:空中交通管理,2008(1):19-20.
[3]周喃,顏波濤,趙洪立.基于多點定位的高精度TOA測量方法研究[J].電子工程學院學報,2014(3):37-39.
[4]孫仲康,周宇,何黎星.單多基地有源無源定位技術[M].北京:國防工業出版社,1996.
[5]曲長文,徐征.一種新的基于角度和時差的穩健定位跟蹤算法[J].信號處理,2011(2):27-31.
[6]王宇,王志雄.無源多站時差定位技術研究及在頻譜監測中的應用[J].山西電子技術,2011(1):62-63.
[7]王成,李少洪.測時差定位系統精度分析與最優布局[J].火控雷達技術,2003,32(1):32-34.
[8]顧曉婕,王新民,李文超.多站時差無源定位探測器位置優化[J].傳感技術學報,2011(1):93-99.
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
海峽科技與產業(2016年3期)2016-05-17 04:32:12
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
