基于內模原理的狀態反饋控制在陀螺平臺視軸穩定系統中的應用
2015-08-09 02:29:08夏濤
河南科技 2015年8期
夏 濤
(中國電子科技集團公司第27研究所,河南 鄭州 450015)
在動平臺光電偵查導引系統中,要求目標瞄準線能夠快速隔離載體角運動對視軸(LOS)的擾動,通過安裝在陀螺穩定平臺上的圖像探測裝置獲取穩定的目標與背景圖像,為大視場目標捕獲和小視場目標識別與跟蹤提供良好的測量和運算基準。為了保證在運動中的目標跟蹤精度,這必然要求視軸穩定系統起制動超調小、動態響應快、恢復時間短。由于傳統的陀螺平臺視軸穩定系統的速度調節一般采用常規的比例積分(PI)控制,系統在階越響應時速度調節器退飽和必然存在超調[1]。對于具有多個狀態變量的陀螺平臺視軸穩定系統,僅將系統輸出信號進行反饋,可能無法滿足系統快速隔離擾動和無靜差漸進跟蹤控制的要求。本文根據內模控制(IMC)原理,設計了一種內模控制器取代常規的比例積分(PI)調節器,很好地解決了轉速超調和無靜差漸進跟蹤控制的問題。實驗結果表明,在內模控制中,由于引入了內部模型,反饋量由原來的輸出全反饋變為擾動估計量的反饋,使系統獲得比常規比例積分(PI)調節更為優良的動態性能和穩態精度,且算法簡單,控制器容易實現[2]。
1 內模控制原理及結構特點
內模控制(Internal Model Control)的概念是由Garcia等人于1982年提出的一種基于控制系統數學模型進行控制器設計的新型控制策略。其設計思路是將對象模型與實際被控對象并聯,控制器逼近模型的動態逆,對單變量而言內模控制器取為其模型最小相位部分的逆,并通過附加低通濾波器以增強系統的魯棒性,與傳統的反饋控制相比,它能夠清楚地表明調節參數和閉環響應及魯棒性的關系,從而兼顧性能和魯棒性。典型內模控制器的一般結構如圖1所示:
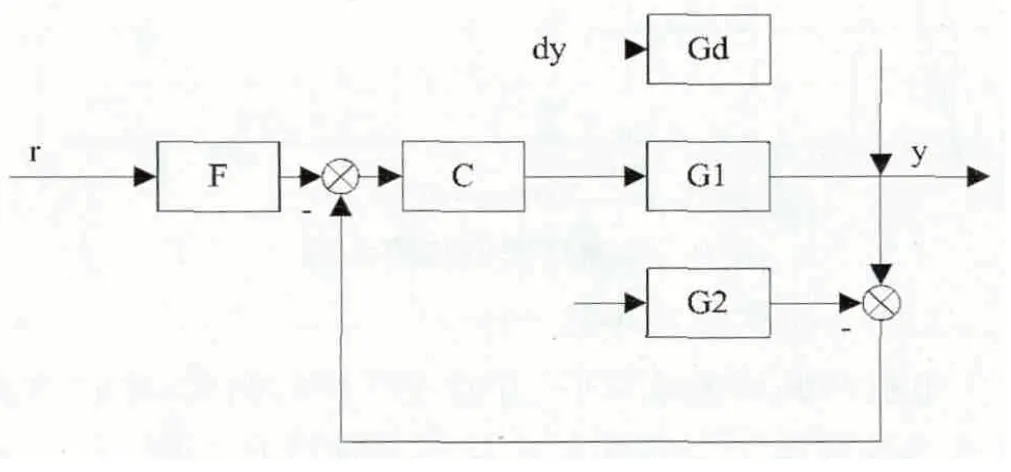
圖1 典型內模控制(IMC)的一般結構
其中y、u為被控對象的輸出量和被控量;r是給定值,dy是外部擾動;G1為被控對象;G2為內部標稱模型;C為內模控制器;F 為前饋調節器。系統設計過程一般為在IMC 典型結構中進行控制器設計,實施時再轉換為常規反饋結構,這樣便于算法的軟件實現,IMC的等效反饋結構如圖2所示。
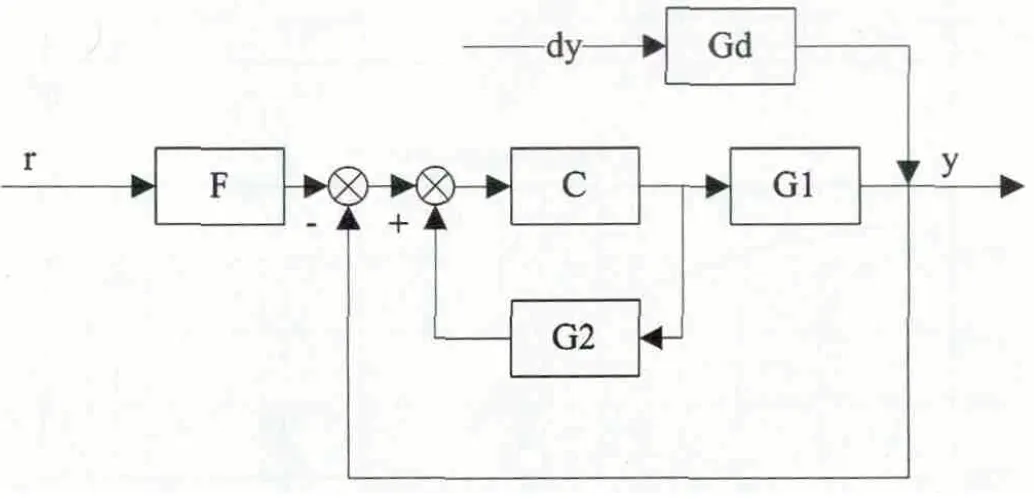
圖2 內模控制(IMC)等效反饋結構
陀螺平臺視軸穩定系統本質上就是以速率陀螺為測速元件的閉環直流調速系統,其性能包括動態性能和靜態性能。就靜態而言,由于內模控制器輸出飽和時等效反饋控制器C 為PI 調節器,因而調速系統對階躍輸入和負載擾動的穩態誤差都是零。就動態而言,C 的參數按工程設計法設計,內模控制器屬于超前型控制器,當突加階躍輸入時,其輸出很快處于飽和限幅狀態,從而使電機在最大電流下實現恒流升速,加快了起動過程。但由于內模控制器沒有積分累加作用,當電機轉速接近給定轉速時,控制器C 就退出飽和限幅狀態,因而轉速不會因為退飽和而產生超調。基于以上原因,為了滿足視軸穩定系統對陀螺平臺的高精度、快速響應要求,本文在輸出反饋變量速度、位置以及電樞電流的閉環校正過程中引入內模控制,使系統達到優良的動態性能和穩態精度[3-4]。
2 陀螺平臺視軸穩定系統的結構特點及控制思想
陀螺平臺視軸穩定系統實質上是圍繞改善伺服驅動裝置的靜、動態特性來展開的,目前能夠得到普遍認同的觀點是,對于具有多個狀態變量的直流伺服系統最有效的控制方法,就是包含電流環的速度內環,再加上一個位置環進行位置控制。
2.1 陀螺平臺視軸穩定系統的結構構成
下面結合某型陀螺平臺視軸穩定系統的工程設計進行探討。這個系統主要是用于對海上目標進行搜索和跟蹤。其伺服控制系統結構圖如圖3所示。
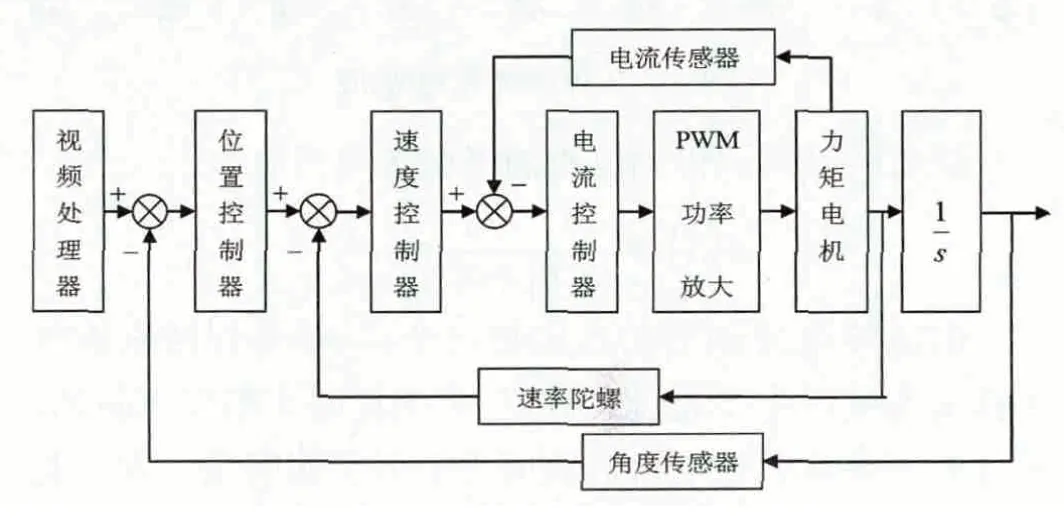
圖3 陀螺伺服穩定跟蹤系統框圖
2.2 陀螺平臺視軸穩定系統的設計
對于具有多個狀態變量的伺服系統,轉矩—速度—位置的調節順序是很自然的,它符合控制對象的結構。這種多環路串級結構只能在下述假定下才能發揮其功能,即越到內環控制,頻帶越寬,電流環的響應最快,而位置環的響應最慢。很顯然,只有在速度環能夠快速執行位置調節器的指令時,位置回路才能很好地起作用,亦即每個內環的工作從屬于外環,基于這些理由,設計調節器的順序先內后外,由里向外,依次引入狀態變量電流、轉速、位置的反饋。在每一步中,依據外環頻帶與內環頻帶之間的相互關系,把內環“等效慣性”降階近似處理為一個低階的數學模型,將控制回路一個接一個地順序投入運行。
2.2.1 電樞電流反饋的設計
陀螺平臺視軸穩定系統本質上是一個力矩平衡系統,由陀螺敏感擾動力矩,從而達到視軸相對于慣性空間穩定的目的。因此,在陀螺平臺的軸系控制中,電機的控制模式選用直接轉矩控制。建立轉矩環(電流環),可以近似地看成是給電樞提供一個外加的電流源,使轉矩環的輸出電流值與閉環的輸入電壓參考值成比例關系,這樣就可以大大提高慣性速率環的控制效果,從而提高系統的隔離度[5]。
給電機輸入階躍電壓,對應的電流輸出如圖4所示:
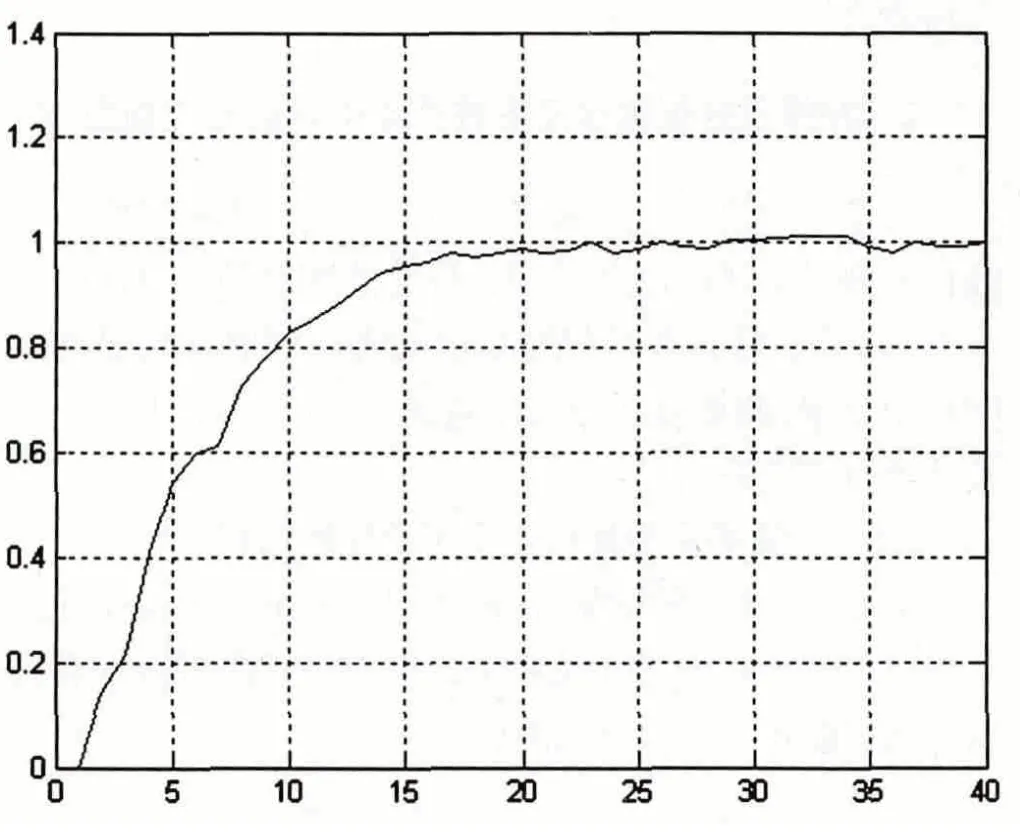
圖4 開環電流階躍響應
經過時域辨識得到電機的電樞傳遞函數為:
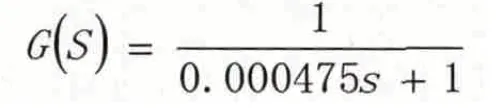
電流環電流調節的作用有兩個:一個是保持電樞電流在動態過程中不超過允許值,突加控制作用時無超調,充分利用直流力矩電機過載能力獲得快速響應。因為此時速度調節器已經進入飽和狀態,其輸出信號通過限幅一般作為極限值加到電流調節器輸入端,電流調節器的作用結果使電樞電流迅速達到并穩定在最大值上,從而實現快速加減速和電流限制作用。電流調節器的另一個作用是使系統抗電源擾動和負載擾動的能力增強,如果沒有電流環,擾動會使繞組電流隨之波動,使電動機的速度響應受影響,雖然速度環可以最終使速度穩定,但需要的過渡時間較長;如果有電流環,由于力矩電機電氣時間常數較小,電流調節器會使受擾動的電流迅速穩定下來,不至于發展到對速度產生大的影響。因而系統的快速性和穩定性得到改善。根據內模原理,在電流環中引入內模控制器,使電樞電流的動態響應快速且無超調[6]。
電流環SIMULINK的仿真模型如圖5所示:
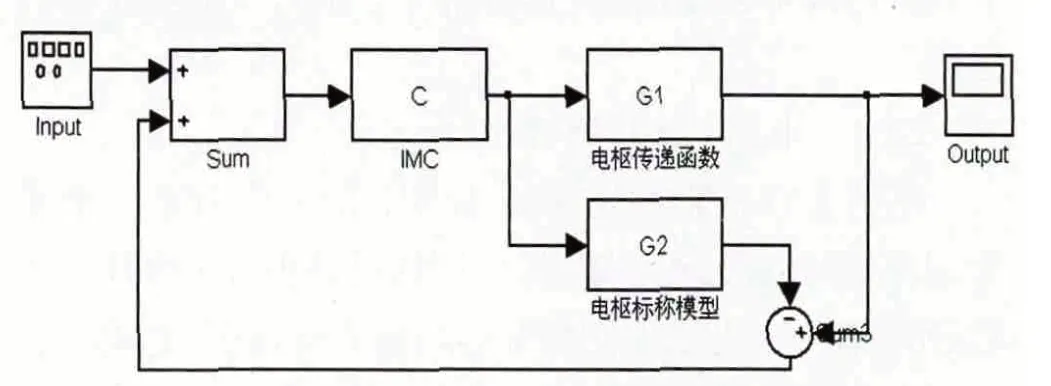
圖5 電流環SIMULINK的仿真模型框圖
通過仿真等效內模調節器的傳遞函數為:

則電流環的階躍響應如圖6所示:
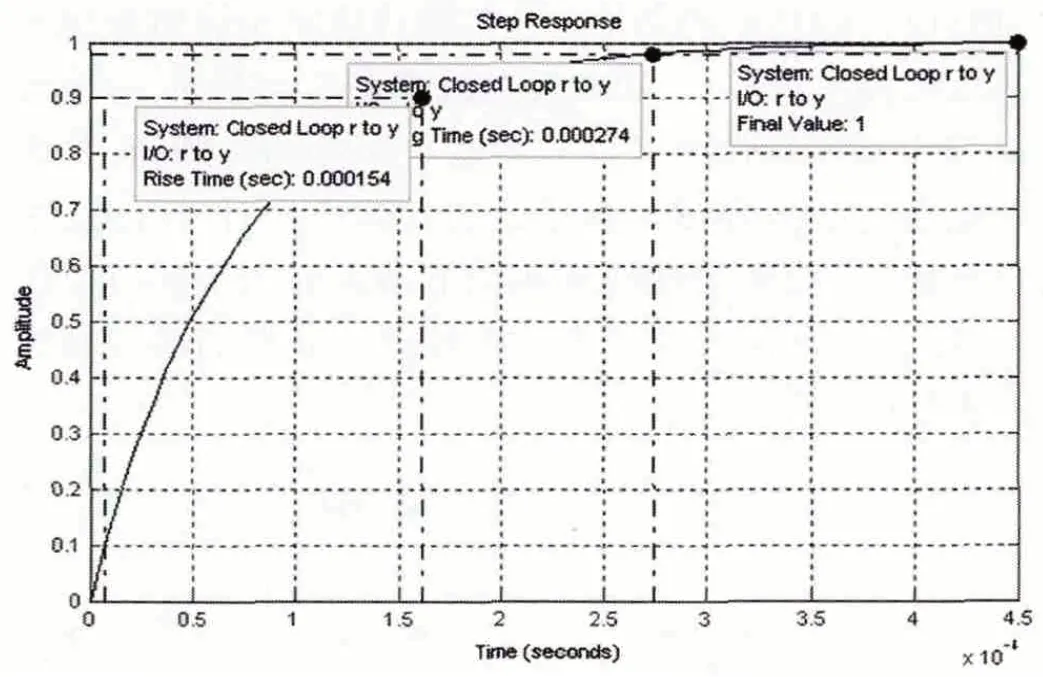
圖6 電流環階躍響應曲線
2.2.2 速率穩定環的設計
電流環調試完成以后,開始速度環的調試,此處的慣性速率環本質上與普通的電機控制速度環不同,其反饋元件為速率陀螺,其敏感的是框架相對于慣性空間的角速率。采用頻率特性分析儀對速率穩定環進行開環頻率特性測試,測試數據擬合成Bode圖如圖7所示:
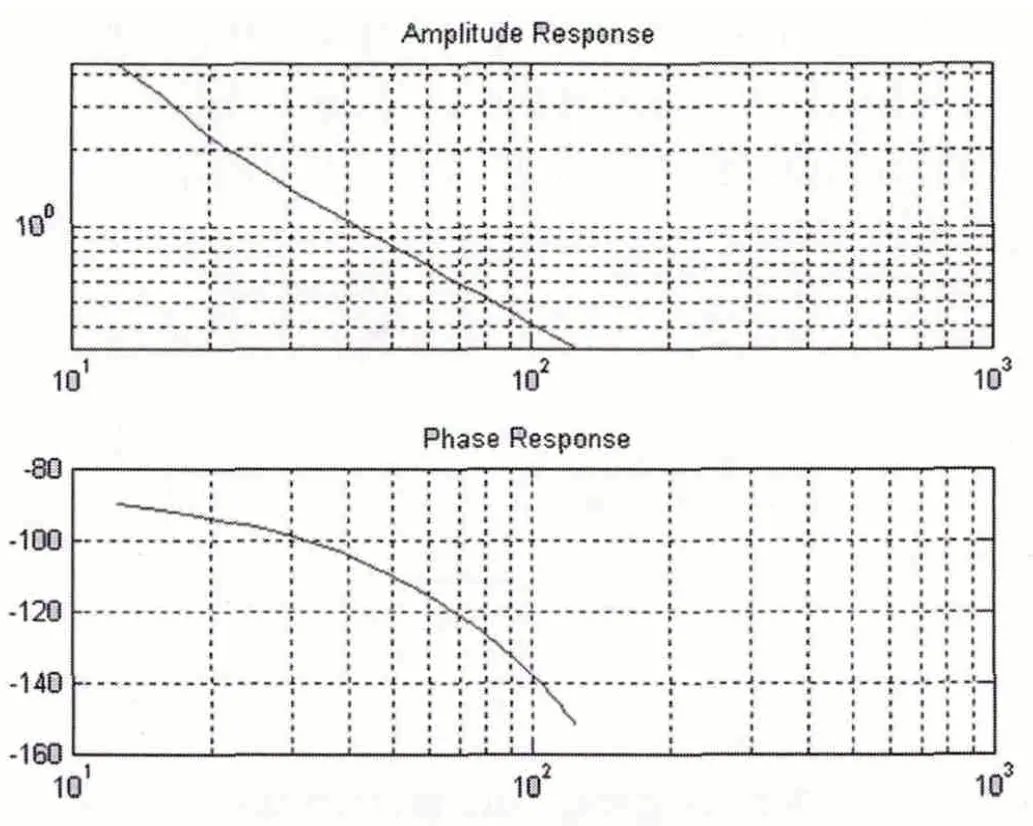
圖7 速度環開環對數幅頻特性曲線
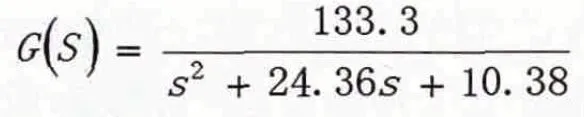
通過速度環開環對數幅頻特性曲線擬合出速度回路的開環傳遞函數為:
速度環SIMULINK的仿真模型如圖8所示:
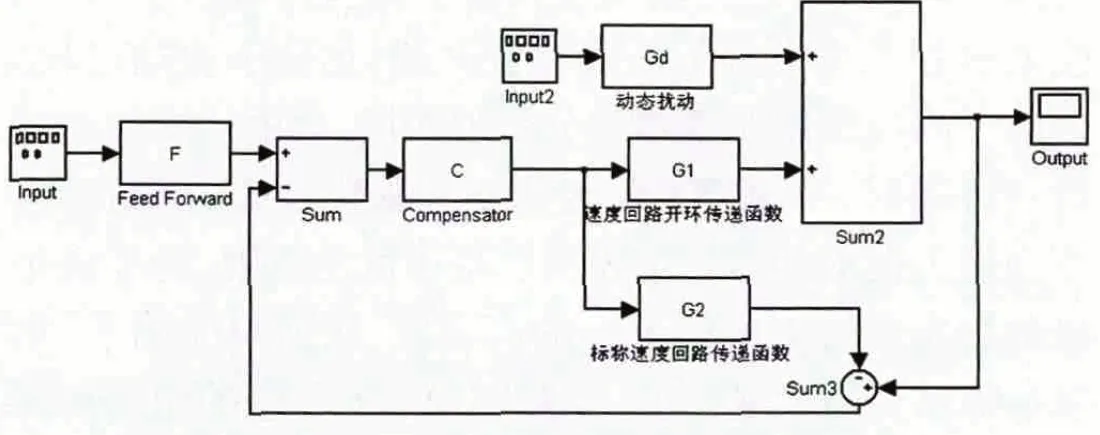
圖8 速度環SIMULINK的仿真模型框圖
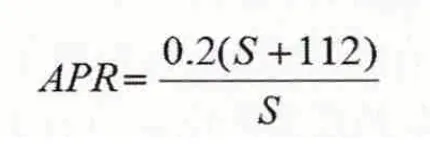
通過仿真速度環等效內模調節器的傳遞函數為:

則速度環的階躍響應如圖9所示:
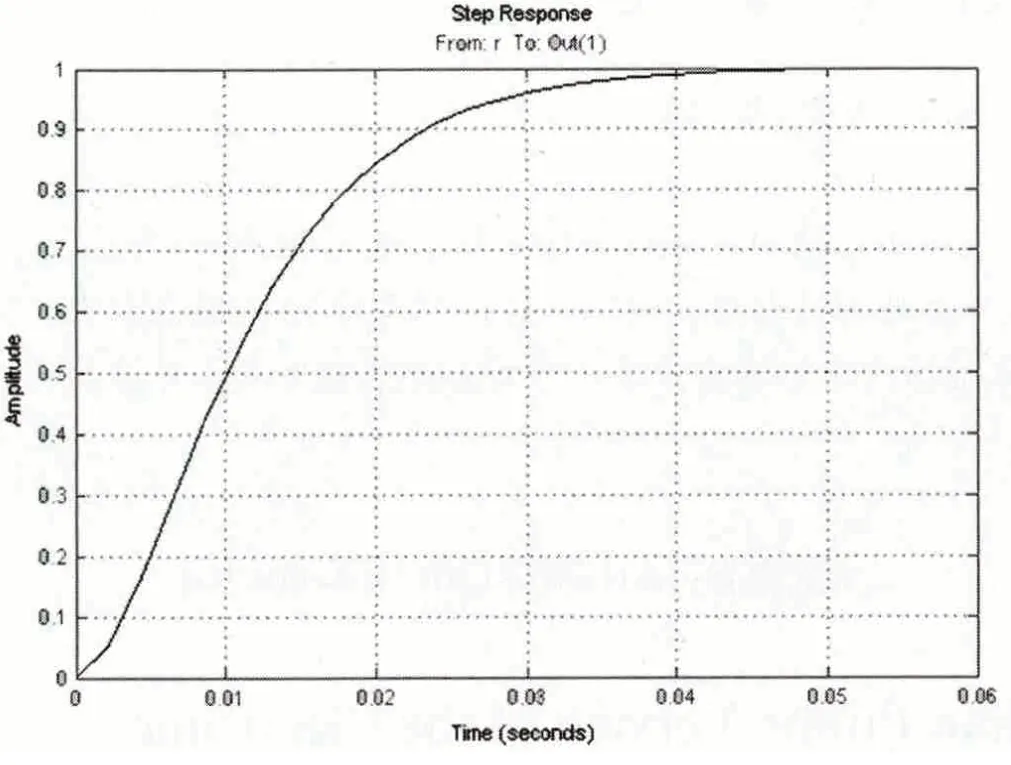
圖9 速度環階躍響應曲線
2.2.3 位置調節器的設計
最后進行位置調節器設計,位置環的根本作用是實現執行機構對位置指令的準確跟蹤,被控量是負載的空間位移,當給定量隨機變化時,系統能使被控量準確無誤地跟隨并復現給定量。具體到文中的某陀螺平臺視軸穩定系統就是實現目標的穩定跟蹤。因此在動態設計時,為了提高系統快速跟隨能力,要求位置環應有較高的截止頻率,因為位置環的截止頻率表征了系統的快速性。在保證了位置回路快速性的同時還必須保證系統的穩態精度,這就要求位置調節器具有大的開環放大增益,且階躍響應無超調。通過仿真,調節器傳遞函數如下:
此時系統位置環的階躍響應曲線如圖10所示,系統上升時間為0.0766s,調節時間為0.132s,終值為1,動態過程無超調,因此,位置調節器設計還是比較滿意的。
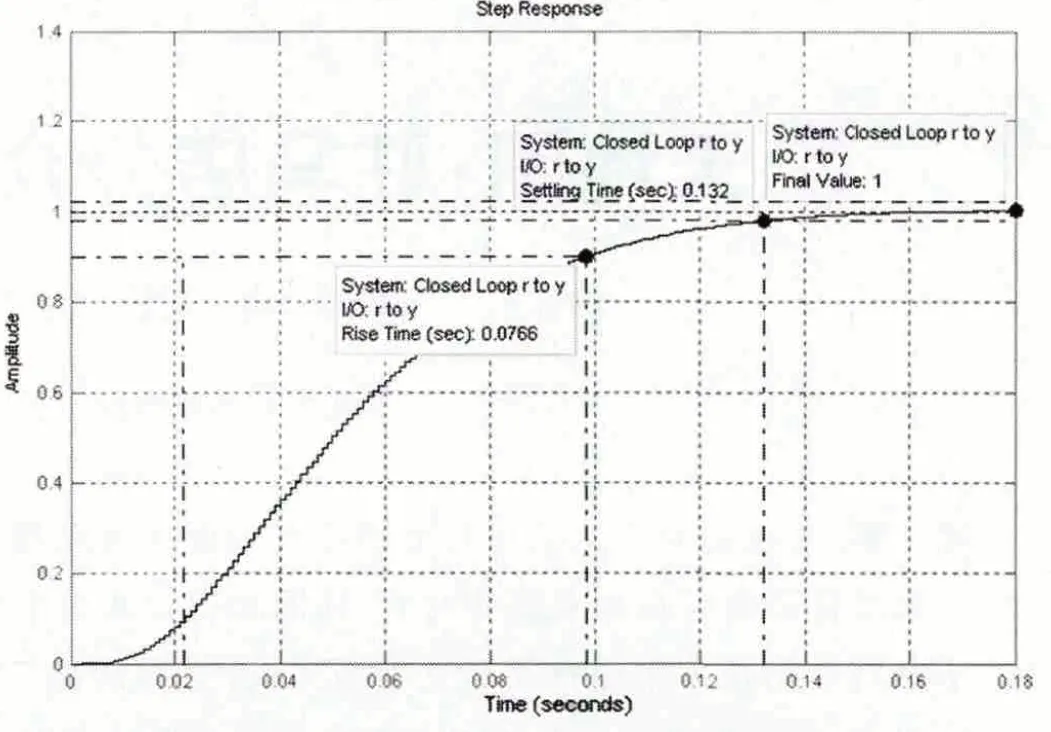
圖10 位置環階躍響應曲線
3 結語
內模控制(IMC)在多環路從屬控制系統中被實踐證明是有效的,達到了期望的設計指標。這些系統的優點在于:首先,可由寬頻帶內環來迅速抑制作用在系統上的擾動;其次,從內環開始分步設計,可以分成幾個步驟解決系統穩定性的問題,通過選取適當的參考變量能夠限制中間狀態變量的極限值;最后將外環路打開,就可以簡單測試和進行現場調試。
[1]姬偉.陀螺穩定光電跟蹤伺服控制系統研究[D].南京:東南大學,2006.
[2]姬偉,李奇,楊海峰,等.精密光電跟蹤轉臺的設計與伺服控制[J].光電工程,2006(03):11-16,72.
[3]姬偉,李奇,許波.運動光電成像跟蹤系統視軸穩定伺服控制設計研究[J].應用基礎與工程科學學報,2007(01):121-129.
[4]胡壽松.自動控制原理[M].北京:科學出版社,2000.
[5]王曉明,王玲.電動機的DSP控制——TI公司DSP應用[M].北京:北京航空航天大學出版社,2004.
[6]黃忠霖.控制系統MATLAB計算及仿真[M].北京:國防工業出版社,2001.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
