基于倒立擺的便捷自動控制教學平臺的研究與設計
2015-08-07 13:39:36燕王江華郭海文
大眾科技 2015年1期
趙 燕王江華郭海文
(1.燕京理工學院,河北 三河 065201;2.華北科技學院,河北 三河 065201)
基于倒立擺的便捷自動控制教學平臺的研究與設計
趙 燕1王江華2郭海文2
(1.燕京理工學院,河北 三河 065201;2.華北科技學院,河北 三河 065201)
設計一基于倒立擺的便捷自動控制教學平臺,內置三維陀螺儀、加速度計等傳感器,可實現平臺的自主直立控制。平臺利用STM32單片機對陀螺儀的角速度和加速度計的加速度進行實時跟蹤,采用卡爾曼濾波算法對陀螺儀與加速度計采集回來的姿態信號進行校正,從而得到一個準確的空間姿態;通過采集編碼器產生的脈沖來計數,形成速度閉環控制,實現雙輪自平衡教學平臺在任何干擾情況下,均能保持直立平衡狀態。該教學平臺的特點在于體積小巧,攜帶方便,操作簡單,運行可靠,調整速度快。該平臺是一個可隨堂演示的PID控制系統,采用現場實物演示將大大增添課堂趣味性,學生們學習相關理論知識時將會更加積極主動,從而提高理論教學的質量。
教學平臺;STM32單片機;PID控制
基于理論教學的抽象不靈活性,導致學生對理論知識的不理解,從而失去學習的興趣,于是創新性的設計出了基于倒立擺的便捷自動控制教學平臺,來調節現存的理論教學模式,進而激發學生學習的積極性,從而提高理論教學的質量。
1 平臺總體設計
平臺采用基于ARM Cortex-M3內核的32位處理器STM32F103C8作為控制核心,其總體結構如圖1所示。采用傳感器MPU-6050來檢測陀螺儀的角速度和加速度計的加速度;按鍵模塊用于菜單的選擇和調試使用;OLED顯示模塊用來顯示平臺的狀態信息;直流電機控制模塊采用PWM方式控制兩個獨立的直流電機運行;電源模塊提供平臺工作所需的+5V和+3.3V電壓;脈沖捕捉模塊用于捕捉采集編碼器產生的脈沖,達到測速的目的;NRF24L01無線模塊利用無線通信方式將數據傳輸至上位機。
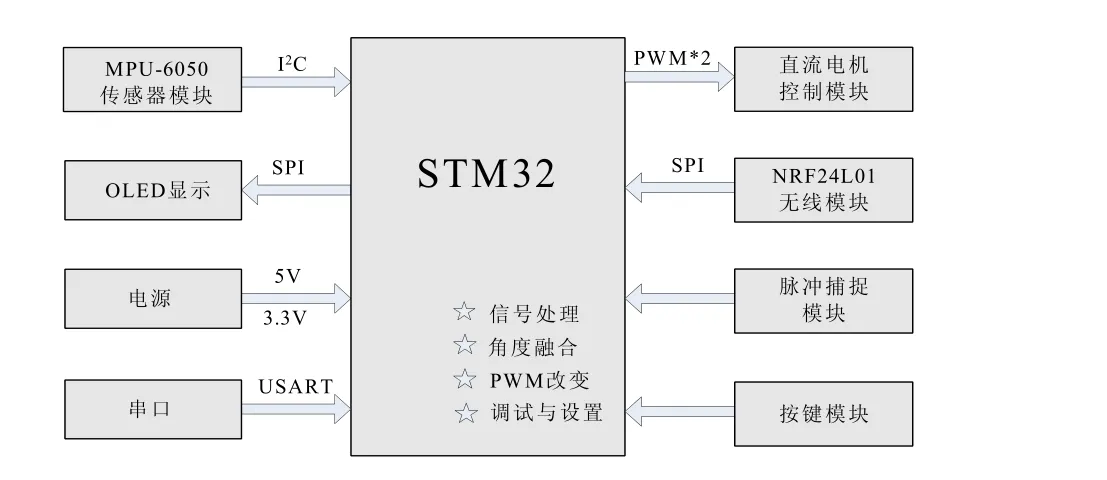
圖1 平臺總體結構圖
2 平臺硬件設計
平臺硬件電路包括STM32單片機主控模塊、電源模塊、傳感器檢測模塊以及直流電機控制模塊等。
2.1 STM32單片機主控模塊
平臺采用32位單片機STM32F103C8作為主控核心,該單片機集高速運算與面向直流電機驅動的高效控制能力于一體,可以用軟件取代模擬器件,方便的修改控制策略和控制參數,兼具故障檢測、自診斷和上位機管理與通信功能,內置數模轉換器、同步串行外設接口、異步串口通信接口、PWM控制管理器,其PWM波形產生單元包括可編程死區控制,可輸出非對稱PWM波形、對稱PWM波形和空間矢量SVP-VM波形。
平臺采用上電復位和手動復位相結合的方式來實現對單片機的復位。時鐘電路采用外部時鐘,晶振頻率為8MHZ。平臺設計有JTAG的程序下載接口,本設計程序的開發主要通過單片機內部的Bootloader程序完成程序的下載和調試,因此單片機最小系統只需要一個UART便可進行,無需額外的接口調試器。若用串口下載代碼,則必須配置BOOT0為1、BOOT1為0;而若使STM32一按復位鍵就開始執行代碼程序,則需配置BOOT0為0、BOOT1為任意狀態即可。[1]
2.2 MPU-6050傳感器模塊
平臺采用MPU-6050傳感器來檢測陀螺儀的角速度和加速度計的加速度。MPU-6050是一個9軸運動處理傳感器,內部整合了3軸陀螺儀、3軸加速器,并自帶AD轉換,通過I2C總線方式與單片機進行通信。該傳感器內置在一個芯片中,可以有效地抑制陀螺儀的溫漂問題。
傳感器模塊通過I2C通信方式輸出相應的9軸數字信號。I2C是二線接口,包括串行數據線SDA和串行時鐘線SCL。連接到I2C接口的設備可做主設備或從設備。主設備將Slave地址傳到總線上,從設備用與其匹配的地址來識別主設備。當連接到系統芯片時,MPU-6050總是作為從設備。SDA和SCL信號線通常需要接上拉電阻到VCC,最大總線速率為400kHzbps。[2]
2.3 OLED顯示模塊
平臺采用OLED顯示屏來顯示一些狀態信息,此顯示屏的分辨率為128×64。OLED顯示參數設置界面如圖2所示,angle_mid為平衡角度的中心角度值,P_angle為角度PID算法的比例參數設置,D_angle為角度PID算法的微分參數設置,P_Speed為速度PID算法的比例參數設置,I_Speed為速度PID算法的積分參數設置,D_Speed為速度PID算法的微分參數設置,speed_set為運動速度的初值。
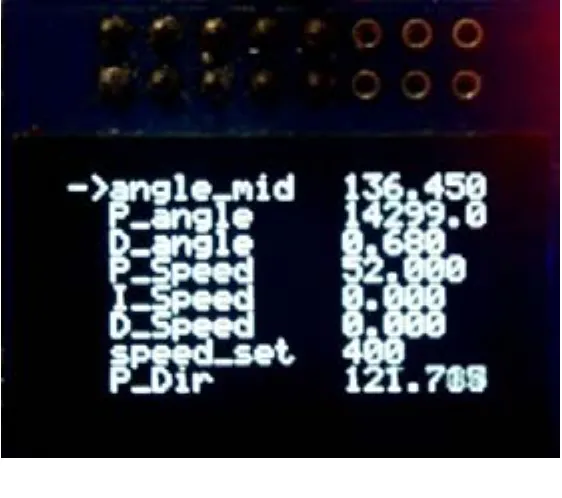
圖2 OLED參數設置界面
2.4 NRF24L01無線模塊
設計中采用的無線模塊為NRF24L01,一方面,利用無線進行數據傳輸,可以避免有線傳輸線對教學平臺調試的制約,通過這種方式可以遠離上位機調試,并且下位機參數數據實時上傳,不會有距離的限制。另一方面,利用NRF24L01制作無線遙控器,通過遙控器對教學平臺中的參數進行修改,便于現場問題的處理,方便調試。
3 平臺軟件設計
3.1 平臺程序設計
平臺由主程序和中斷程序兩部分程序構成。主程序流程圖如圖3所示,在主程序中先進行倍頻、GPIO、OLED、PWM以及定時器等各個模塊的初始化,然后使能總中斷。這樣可以為各個模塊配置好寄存器信息,給中斷要處理的信息提供保障。同時等中斷處理完信息又能確保中斷處理后的信息實時顯示在OLED上。方便程序的調試和效果的顯示。
中斷處理流程圖如圖4所示,利用定時器1ms中斷,在中斷中完成信號的采集和處理。采集MPU-6050輸出的陀螺儀、加速度計的數據值,然后將采集數據進行中值濾波,將中值濾波后的數據再進行10次的均值濾波。這樣可以保證濾去雜波和不正確的值,得到的數據比較平滑。將得到的值與中心值進行比較得到變化值,再將變化的信號值轉化成變化的角度值。將得到處理后的陀螺儀變化的角度值和加速度變化的角度值進行卡爾曼濾波,得到的角度與設定好的角度比較并用PID算法計算。再通過STM32的脈沖捕捉功能,分別捕捉兩路脈沖并計數,將此數值與程序中設定好的數值比較并用PID算法計算。最后將角度PID值和速度PID值疊加,再調節PWM的占空比。[3]
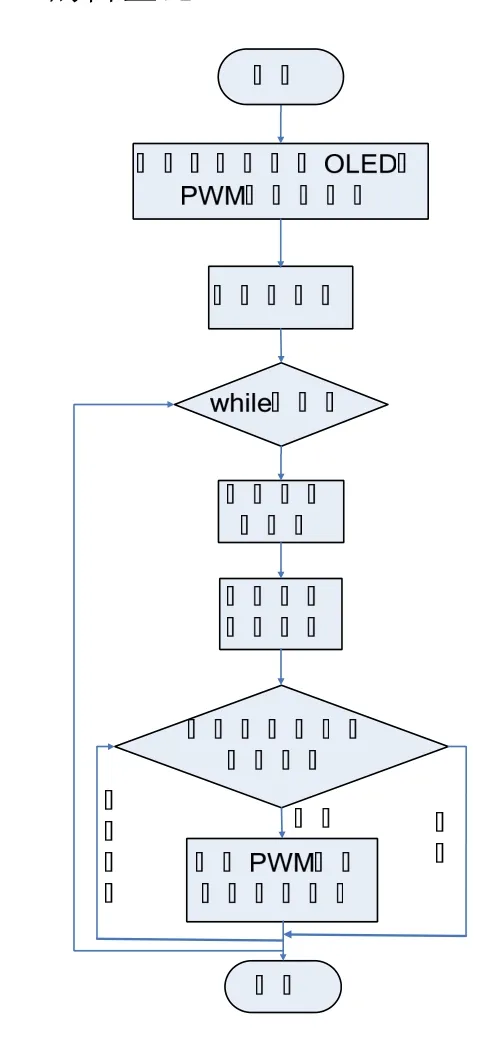
圖3 平臺主程序流程圖
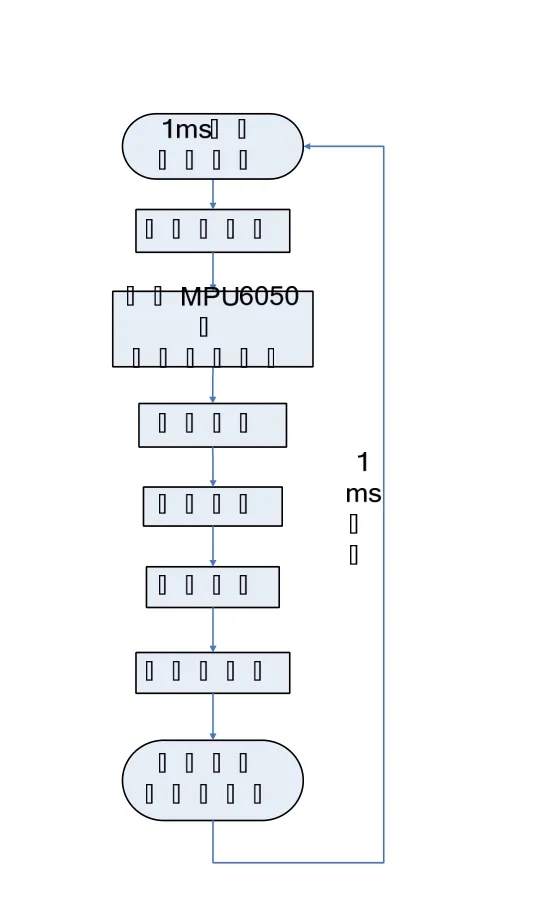
圖4 平臺中斷程序流程圖
3.2 單片機各模塊初始化
3.2.1 系統時鐘初始化
該函數的主要功能是初始化STM32的時鐘。其中包括對向量表的配置,以及相關外設的復位及配置。Stm32_Clock_Init函數只有一個變量PLL,用來配置時鐘的倍頻系數。比如當前所用的晶振為8MHz,PLL的值設為9,那么STM32將以72MHz的速度運行。系統時鐘初始化程序如下:
void Stm32_Clock_Init(u8 PLL)
{
unsigned char temp=0;
MYRCC_DeInit(); //復位并配置向量表
RCC->CR|=0x00010000; //外部高速時鐘使能HSEON
while(!(RCC->CR>>17)); //等待外部時鐘就緒
RCC->CFGR=0X00000400;
//APB1=DIV2;APB2=DIV1;AHB=DIV1;
PLL - =2; //抵消2個單位
RCC->CFGR|=PLL<<18; //設置PLL值 2~16
RCC->CFGR|=1<<16; //PLLSRC ON
FLASH->ACR|=0x32; //FLASH 2個延時周期
RCC->CR|=0x01000000; //PLLON
while(!(RCC->CR>>25)); //等待PLL鎖定
RCC->CFGR|=0x00000002; //PLL作為系統時鐘
while(temp!=0x02) //等待PLL作為系統時鐘設置成功
{
temp=RCC->CFGR>>2;
temp&=0x03;
}
}
3.2.2 I/O口模塊初始化
STM32F103C8的I/O口可以配置成輸入模式、輸出模式或復用模式。如果把端口配置成輸出模式,有3種輸出速度可選,即2MHz、10MHz和50MHz,這個速度是指I/O口驅動電路的響應速度而不是輸出信號的速度,輸出信號的速度與程序有關。通過選擇速度來選擇不同的輸出驅動模塊,達到最佳的噪聲控制和降低功耗的目的。高頻的驅動電路,噪聲也高,當不需要高的輸出頻率時,請選用低頻驅動電路,這樣非常有利于提高系統的EMI性能。如果要輸出較高頻率的信號,但卻選用了較低頻率的驅動模塊,很可能會得到失真的輸出信號。如果把端口配置成輸入模式,無需設置輸出速度即可。如果把端口配置成復用輸出模式,則引腳和輸出寄存器斷開,并和片上外設的輸出信號連接。將管腳配置成復用輸出功能后,如果外設沒有被激活,那么它的輸出將不確定。
3.2.3 PWM模塊初始化
先對APB1ENR進行設置,開啟TIM2的時鐘,配置PA0、PA1為復用輸出,因為TIM2_CH2、TIM2_CH3通道是以I/O復用的形式連接到PA0、PA1上的,故使用其復用輸出功能。在開啟了TIM2的時鐘之后,要設置ARR和PSC兩個寄存器的值來控制輸出PWM的周期。PWM周期在這里不宜設置的太小,否則會有明顯的閃爍現象。之后設置TIM2_CH2、TIM2_CH3的PWM模式,使能TIM2的CH2、CH3輸出。在完成以上設置了之后,需要開啟TIM2的通道2輸出以及TIM2中斷。前者通過TIM2_CCER1來設置,是單個通道的開關, 而后者則通過TIM2_CR1來設置,是整個TIM2的總開關。只有設置了這兩個寄存器,在TIM2的通道2、3上才能輸出PWM波,此時輸出的PWM波的占空比和頻率都是固定的,通過修改TIM2_CCR2、TIM2_CCR3則可以控制CH2、CH3的輸出占空比,繼而控制舵機的輸出角度。
4 總結
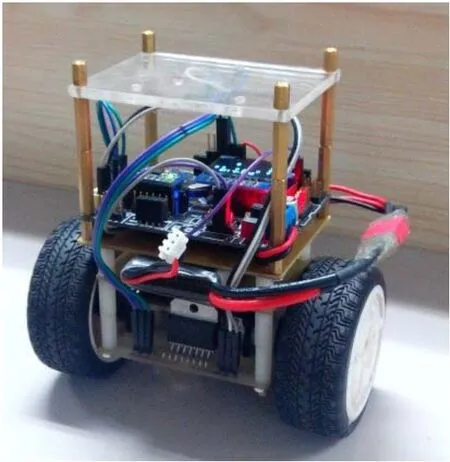
圖5 平臺實物圖
平臺實物如圖5所示。本教學平臺體積小巧,攜帶方便,操作簡單,運行可靠,調整速度快,可應用于PID控制相關課程的理論教學,采用現場實物演示將大大增添課堂趣味性,學生們學習相關理論知識時將會更加積極主動,從而提高理論教學的質量。
[1] 陳春,朱向冰,朱騫,等.基于STM32單片機的DLP驅動電路的研究[J].電子設計工程,2012,20(2):126-128.
[2] 李航.小型四旋翼飛行器實時控制系統研究[D].大連:大連理工大學,2010.
[3] 劉金琨.智能控制[M].北京:電子工業出版社,2009:124-125.
Research and design of convenient automatic control teaching platform based inverted pendulum
To design a teaching platform of the convenient automatic control based on the inverted pendulum , built-in 3 d gyroscope and accelerometer sensors, can realize autonomous vertical control. Platform uses STM32 MCU to track the accelerometer gyroscope of angular velocity and acceleration. Using Calman filtering algorithm for correcting the posture signal, the signal is collected by the gyroscope and accelerometer, to get an accurate space posture. By collecting generated pulse encoder counts, forming a closed loop speed control. Realization of two-wheeled self-balancing teaching platform in any interference, can maintain upright balance. Features of the teaching platform is compact, easy to carry, easy to operate, reliable, fast adjustment. The platform is a quiz presentation PID control system. Using live demonstrations will greatly increase the physical classroom fun. Students will learn the theory of knowledge when more proactive, thereby improving the quality of teaching theory.
Teaching platform; STM32 MCU; PID control
TP273
A
1008-1151(2015)01-0015-03
2014-12-12
廊坊市科學技術研究與發展計劃自籌經費項目“基于倒立擺的便捷自動控制教學平臺的研究與設計”(2014011033)。
趙燕(1982-),女,燕京理工學院講師,從事理論及實驗教學和科研工作。
猜你喜歡
甘肅教育(2020年14期)2020-09-11 07:57:50
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
人大建設(2019年12期)2019-05-21 02:55:44
瞭望東方周刊(2017年42期)2017-12-05 18:49:38
東方教育(2017年19期)2017-12-05 15:14:48
環球時報(2017-03-30)2017-03-30 06:44:45
唐山文學(2016年2期)2017-01-15 14:03:59
中國衛生(2015年3期)2015-11-19 02:53:32