跨越式自走動力底盤的設計
2015-08-06 22:43:02雷昌浩盧勇濤
湖北農(nóng)業(yè)科學 2015年10期
關鍵詞:設計
雷昌浩 盧勇濤

摘要:設計了具有自走功能的跨越式高架動力底盤,并對底盤機架進行靜力學分析。結果表明,底盤機架具有可靠性和承載性,為相應作業(yè)機具在該動力底盤上的配置提供理論依據(jù)和參考。
關鍵詞:自走底盤;設計;靜力分析;穩(wěn)定性
中圖分類號:S220.2 文獻標識碼:A 文章編號:0439-8114(2015)10-2493-04
DOI:10.14088/j.cnki.issn0439-8114.2015.10.051
目前,田管作業(yè)機械多采用以農(nóng)用拖拉機為基礎的作業(yè)機具,作業(yè)機具與拖拉機多采用拖掛的連接方式,整體結構龐大、質(zhì)量重、能耗高,并且大多數(shù)作業(yè)機具的設計制作以拖拉機為基礎,給作業(yè)機具的優(yōu)化改進帶來較大難度[1-3]。隨著農(nóng)業(yè)生產(chǎn)技術不斷進步和農(nóng)業(yè)機械化程度不斷提高,常規(guī)高地隙田間作業(yè)機械平臺難以滿足高桿作物中后期田間作業(yè)的問題日趨嚴重[4,5]。基于此,開展了跨越式自走高架動力底盤的研究,設計了具有自走功能的跨越式動力底盤,并對其進行靜力學分析和動力學研究,為高桿作物中后期植保施藥提供適用型作業(yè)平臺奠定基礎,同時為相應的作業(yè)裝置在該自走平臺上的配置提供理論依據(jù)和參考[6]。
1 跨越式自走動力底盤結構
跨越式自走動力底盤采用前輪轉(zhuǎn)向、后輪驅(qū)動的門架式結構,主要由機架、動力系統(tǒng)、駕駛室、傳動系統(tǒng)、轉(zhuǎn)向機構、支撐臂和行駛輪等組成(圖1)。由圖1可知,前輪1通過前輪支撐臂2與前橫梁13套接,前橫梁13通過鉸接自平衡機構15與機架11鉸接,在保證輪距調(diào)整便捷性的同時,滿足了機具穩(wěn)定性要求;在兩個前輪支撐臂2上分別設有助力轉(zhuǎn)向油缸14,油缸一端與轉(zhuǎn)向機構16鉸接,另一端與機架11鉸接,通過活塞桿的同步推拉實現(xiàn)對行駛方向的控制;動力系統(tǒng)3固定于機架上,通過自帶的操控系統(tǒng)實現(xiàn)對行駛速度、行駛方向、制動的操控;張緊裝置7設置于后橫梁9上,通過U形卡固定,可以實現(xiàn)前后和上下雙向調(diào)節(jié),滿足水平、豎直方向鏈傳動的張緊。同時,張緊裝置7與后輪6相連的鏈輪可以根據(jù)后輪輪距的大小進行相應的調(diào)整,滿足不同作物及相同作物不同行距田間作業(yè)的要求;后輪6通過后輪支撐臂5與后橫梁9卡接,鏈條在后輪支撐臂5內(nèi)與后輪6驅(qū)動鏈輪相連,保證輪距調(diào)節(jié)的便捷性和田間作業(yè)的安全性。
2 跨越式自走動力底盤工作過程
發(fā)動機啟動后,將動力傳遞至中央傳動,中央傳動驅(qū)動拖拉機后輪回轉(zhuǎn)軸帶動鏈輪轉(zhuǎn)動,鏈輪經(jīng)傳動鏈將動力傳遞至張緊裝置,張緊裝置將來自水平方向的動力轉(zhuǎn)化為豎直方向的動力,并通過鏈傳動驅(qū)動后輪,實現(xiàn)跨越自走式動力底盤的前進與后退。同時,駕駛人員通過操控動力系統(tǒng)自帶的方向盤,控制助力轉(zhuǎn)向油缸,實現(xiàn)對機具方向的操控。剎車制動時,拖拉機機身自帶的剎車系統(tǒng)進行制動,保證行車安全。
3 跨越式自走動力底盤傳動系統(tǒng)
設計的底盤采用鏈傳動,即發(fā)動機將功率傳遞至中央傳動,中央轉(zhuǎn)動通過兩個半軸分別傳遞至鏈傳動系統(tǒng):第一級鏈傳動將拖拉機半軸輸出的動力向后傳遞,即由鏈輪Z1傳遞至鏈輪Z2;第二級鏈傳動是將動力從鏈輪Z2(Z3)向下傳遞至鏈輪Z4,以驅(qū)動行走輪前進或后退,鏈傳動系統(tǒng)示意圖如圖2所示。
4 機架靜力分析
機架作為跨越式自走動力底盤最主要的零部件之一,是連接行走輪支撐臂及各零部件的基礎。綜合考慮機具重量、制作成本及配置的作業(yè)機具等因素,底盤的主梁材料選為Q235的矩形管(120 mm×100 mm×8 mm),并根據(jù)整機配置,設計底盤相應的機架,為確保底盤的承載能力及其安全可靠性,在SolidWorks Simulation環(huán)境中對其進行靜力學分析,確定選材及結構設計的合理性和科學性。
前橫梁與前輪支撐臂鏈接,兩個后輪支撐臂支撐于后端的兩個橫梁兩側,對設計的機架進行約束,分別固定前橫梁的支承軸和尾部兩個橫梁的兩側底面(圖3)。
根據(jù)所選的博馬420型拖拉機,總重為1 590 kg(含前后輪),綜合估算底盤上承受的重量包括底盤自身重量約為450 kg、拖拉機機身重量約1 350 kg、相應的零部件重量約230 kg、駕駛人員重量約80 kg,合計作業(yè)機具總重量約為2 110 kg,對機架施加相應的載荷,并將載荷施加在拖拉機機頭與機架連接處(圖4),并對機架進行網(wǎng)格化(圖5)。
對機架進行靜力學分析,在10倍變形比情況下,機架應變結果見圖6,最大應變?yōu)?.342×10-4 m,幾乎未發(fā)生變形,在絕對安全范圍內(nèi),所選的主梁材料完全滿足機架靜力安全需要。
5 穩(wěn)定性分析
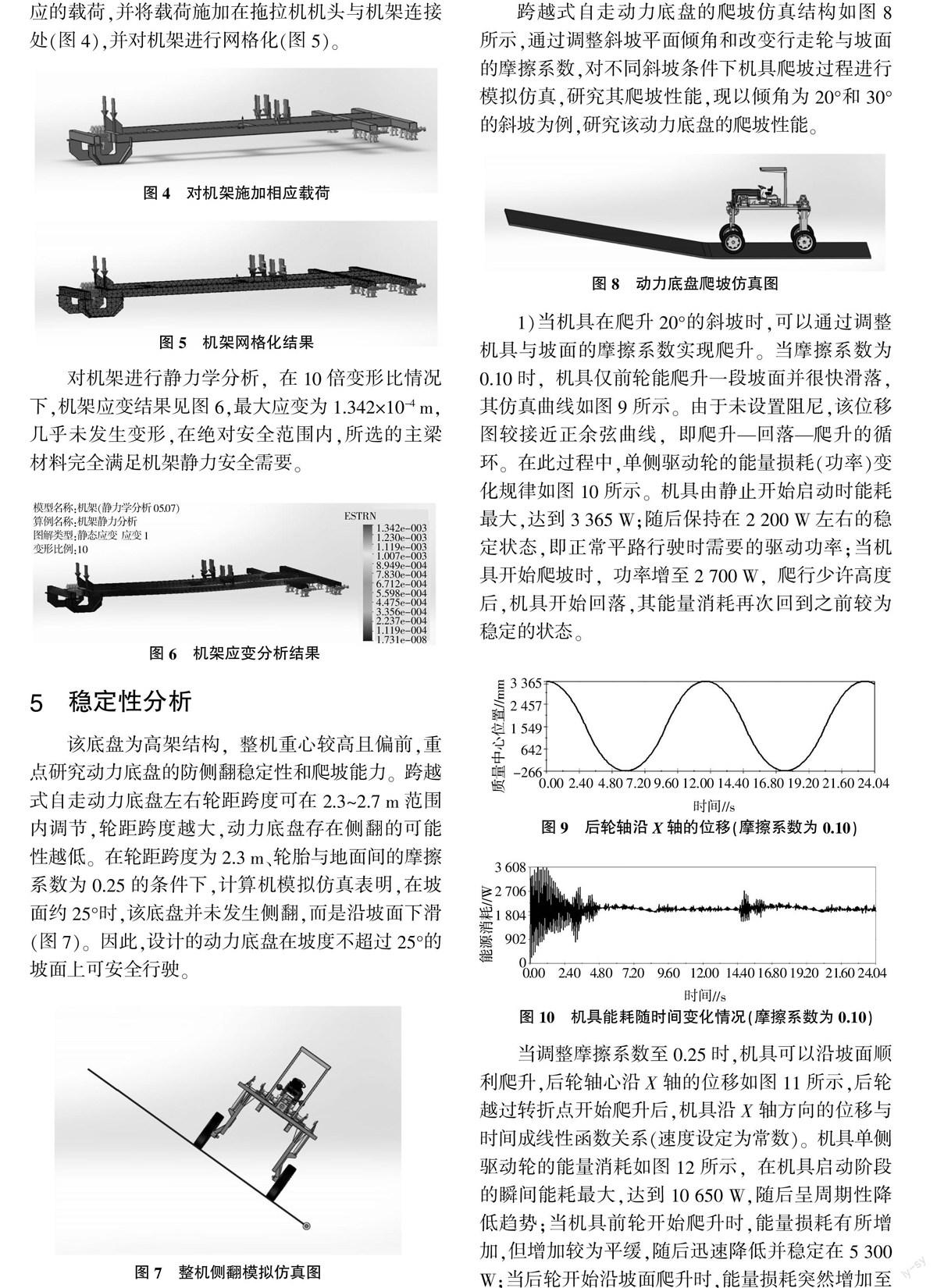
該底盤為高架結構,整機重心較高且偏前,重點研究動力底盤的防側翻穩(wěn)定性和爬坡能力。跨越式自走動力底盤左右輪距跨度可在2.3~2.7 m范圍內(nèi)調(diào)節(jié),輪距跨度越大,動力底盤存在側翻的可能性越低。在輪距跨度為2.3 m、輪胎與地面間的摩擦系數(shù)為0.25的條件下,計算機模擬仿真表明,在坡面約25°時,該底盤并未發(fā)生側翻,而是沿坡面下滑(圖7)。因此,設計的動力底盤在坡度不超過25°的坡面上可安全行駛。
跨越式自走動力底盤的爬坡仿真結構如圖8所示,通過調(diào)整斜坡平面傾角和改變行走輪與坡面的摩擦系數(shù),對不同斜坡條件下機具爬坡過程進行模擬仿真,研究其爬坡性能,現(xiàn)以傾角為20°和30°的斜坡為例,研究該動力底盤的爬坡性能。
1)當機具在爬升20°的斜坡時,可以通過調(diào)整機具與坡面的摩擦系數(shù)實現(xiàn)爬升。當摩擦系數(shù)為0.10時,機具僅前輪能爬升一段坡面并很快滑落,其仿真曲線如圖9所示。由于未設置阻尼,該位移圖較接近正余弦曲線,即爬升—回落—爬升的循環(huán)。在此過程中,單側驅(qū)動輪的能量損耗(功率)變化規(guī)律如圖10所示。機具由靜止開始啟動時能耗最大,達到3 365 W;隨后保持在2 200 W左右的穩(wěn)定狀態(tài),即正常平路行駛時需要的驅(qū)動功率;當機具開始爬坡時,功率增至2 700 W,爬行少許高度后,機具開始回落,其能量消耗再次回到之前較為穩(wěn)定的狀態(tài)。
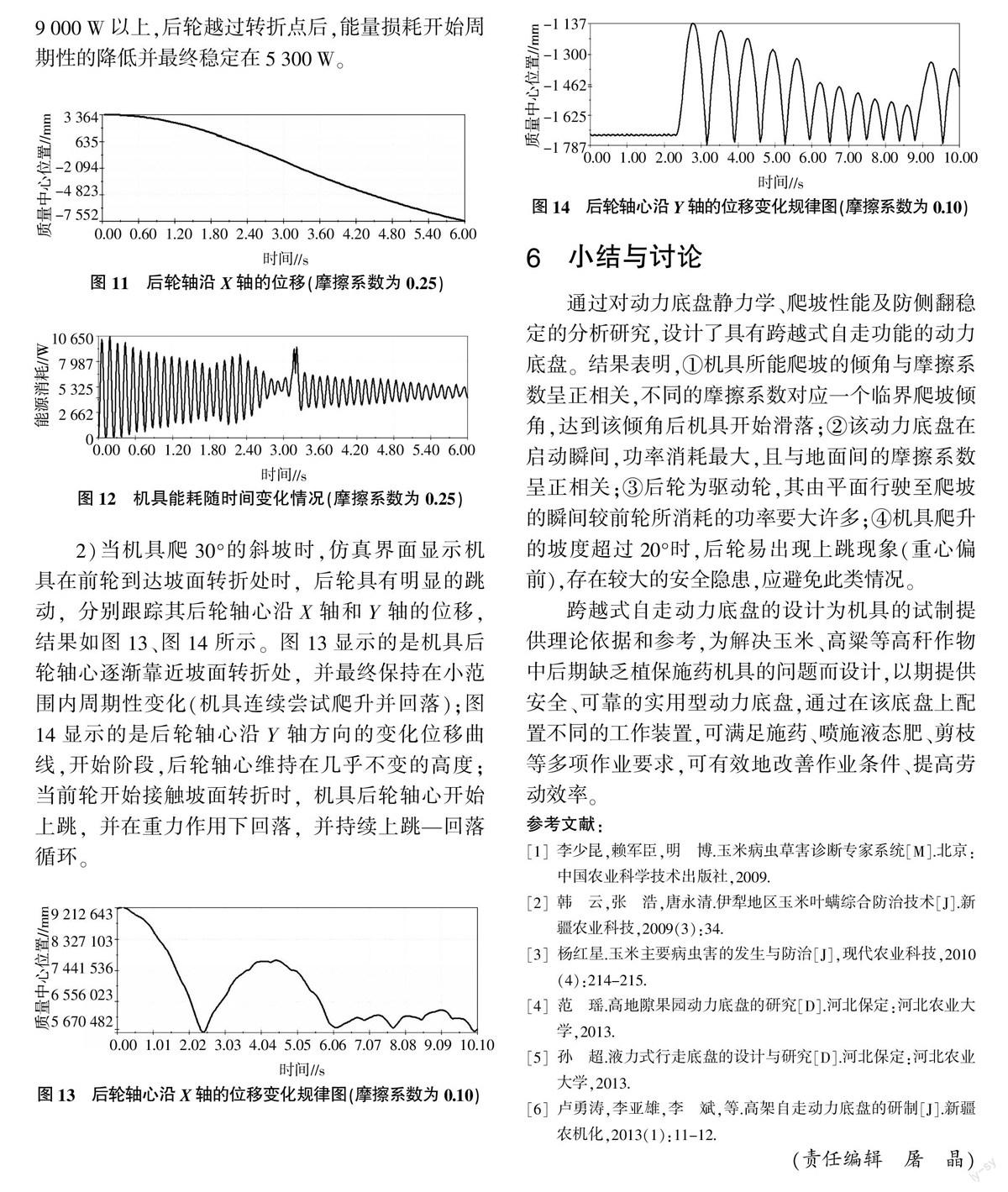
當調(diào)整摩擦系數(shù)至0.25時,機具可以沿坡面順利爬升,后輪軸心沿X軸的位移如圖11所示,后輪越過轉(zhuǎn)折點開始爬升后,機具沿X軸方向的位移與時間成線性函數(shù)關系(速度設定為常數(shù))。機具單側驅(qū)動輪的能量消耗如圖12所示,在機具啟動階段的瞬間能耗最大,達到10 650 W,隨后呈周期性降低趨勢;當機具前輪開始爬升時,能量損耗有所增加,但增加較為平緩,隨后迅速降低并穩(wěn)定在5 300 W;當后輪開始沿坡面爬升時,能量損耗突然增加至9 000 W以上,后輪越過轉(zhuǎn)折點后,能量損耗開始周期性的降低并最終穩(wěn)定在5 300 W。
2)當機具爬30°的斜坡時,仿真界面顯示機具在前輪到達坡面轉(zhuǎn)折處時,后輪具有明顯的跳動,分別跟蹤其后輪軸心沿X軸和Y軸的位移,結果如圖13、圖14所示。圖13顯示的是機具后輪軸心逐漸靠近坡面轉(zhuǎn)折處,并最終保持在小范圍內(nèi)周期性變化(機具連續(xù)嘗試爬升并回落);圖14顯示的是后輪軸心沿Y軸方向的變化位移曲線,開始階段,后輪軸心維持在幾乎不變的高度;當前輪開始接觸坡面轉(zhuǎn)折時,機具后輪軸心開始上跳,并在重力作用下回落,并持續(xù)上跳—回落循環(huán)。
6 小結與討論
通過對動力底盤靜力學、爬坡性能及防側翻穩(wěn)定的分析研究,設計了具有跨越式自走功能的動力底盤。結果表明,①機具所能爬坡的傾角與摩擦系數(shù)呈正相關,不同的摩擦系數(shù)對應一個臨界爬坡傾角,達到該傾角后機具開始滑落;②該動力底盤在啟動瞬間,功率消耗最大,且與地面間的摩擦系數(shù)呈正相關;③后輪為驅(qū)動輪,其由平面行駛至爬坡的瞬間較前輪所消耗的功率要大許多;④機具爬升的坡度超過20°時,后輪易出現(xiàn)上跳現(xiàn)象(重心偏前),存在較大的安全隱患,應避免此類情況。
跨越式自走動力底盤的設計為機具的試制提供理論依據(jù)和參考,為解決玉米、高粱等高稈作物中后期缺乏植保施藥機具的問題而設計,以期提供安全、可靠的實用型動力底盤,通過在該底盤上配置不同的工作裝置,可滿足施藥、噴施液態(tài)肥、剪枝等多項作業(yè)要求,可有效地改善作業(yè)條件、提高勞動效率。
參考文獻:
[1] 李少昆,賴軍臣,明 博.玉米病蟲草害診斷專家系統(tǒng)[M].北京:中國農(nóng)業(yè)科學技術出版社,2009.
[2] 韓 云,張 浩,唐永清.伊犁地區(qū)玉米葉螨綜合防治技術[J].新疆農(nóng)業(yè)科技,2009(3):34.
[3] 楊紅星.玉米主要病蟲害的發(fā)生與防治[J],現(xiàn)代農(nóng)業(yè)科技,2010(4):214-215.
[4] 范 瑤.高地隙果園動力底盤的研究[D].河北保定:河北農(nóng)業(yè)大學,2013.
[5] 孫 超.液力式行走底盤的設計與研究[D].河北保定:河北農(nóng)業(yè)大學,2013.
[6] 盧勇濤,李亞雄,李 斌,等.高架自走動力底盤的研制[J].新疆農(nóng)機化,2013(1):11-12.
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04