基于智能鉆井的二維井眼軌道設計及修正方法
2015-08-04 09:54:53劉維凱畢雪亮徐海粟于曉文
石油礦場機械 2015年10期
劉維凱,閆 鐵,畢雪亮,徐海粟,張 楠,于曉文
基于智能鉆井的二維井眼軌道設計及修正方法
劉維凱a,閆鐵a,畢雪亮a,徐海粟b,張楠a,于曉文a
(東北石油大學a.油氣鉆井技術國家工程實驗室;b.提高油氣采收率教育部重點實驗室,黑龍江大慶163318)①
完全智能鉆井系統是未來定向鉆井技術的發展方向,其井下系統可以智能識別儲層情況,在地面預測出現較大誤差時,能夠自動設計相應的井眼軌道完成精確中靶的施工目標。在能夠獲取實際地質信息的前提下,對于存在埋深誤差的大面積儲層,設計了二維智能井眼軌道。設計的軌道修正閉環控制系統,能有效控制井眼軌跡與設計軌道的符合率。提出的二維井眼軌道模型能夠充分反映出智能鉆井的技術特點和需求,并具有通用性,可廣泛應用于斜直井、定向井、水平井的軌道設計、監測及修正設計,這種新的數學模型和設計方法為智能鉆井技術的推廣和應用奠定了基礎。
智能鉆井;二維軌道設計;二維軌道修正
1 完全智能鉆井系統
1.1基本組成
完全智能鉆井系統由地面監控系統、井下數據處理與軌道設計系統、井下測量與測控系統、雙向通訊系統、偏置執行機構5部分組成[1-2],如圖1所示。相比于旋轉導向鉆井系統,完全智能鉆井系統應該具有高速高效的雙向通訊系統、能探測儲層及鉆具信息的隨鉆井下測量系統、能對測量數據進行處理并作出決策的井下數據處理與軌道設計系統、能夠將井下信息實時可視化反映到監控屏和可干預井下智能鉆井系統的地面監控系統、能鉆出平滑井眼精確改變鉆具造斜能力的偏置執行機構。地面監控系統不斷將井深參數傳入井下數據處理與軌道設計系統,井下數據處理與軌道設計系統處理井下測量系統傳來的數據并結合井深參數,在預測出現較大誤差時,智能設計井眼軌道。在鉆井過程中,井下測量與測控系統中的工具測控系統不斷將實鉆軌道與設計軌道進行對比,通過偏置執行機構糾正偏差。
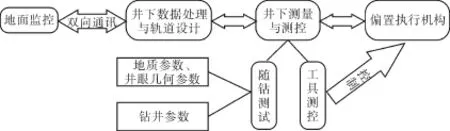
圖1 完全智能鉆井系統基本組成
1.2完全智能鉆井系統特點
20世紀80年代中期以后,國際石油鉆井中使用隨鉆測量、隨鉆測井、隨鉆地震、隨鉆地層評價、鉆井動態信息實時采集處理、地質導向和井下旋轉導向閉環鉆井等先進技術以來,鉆井技術發生了質的變化,其變化特征為[3-7]:
1)鉆井信息數字化。在鉆井過程中,井下地質參數、鉆井參數、流體參數和導向工具位置及狀態的實時測試、傳輸、分析、執行、反饋和修正,以及鉆井信息向完全數字化方向發展,越來越脫離人們的經驗影響和控制,鉆井過程逐步成為可用數字描述的確定性過程。
2)工具和作業智能化、集成化。當前的導向鉆具、測試工具和作業控制都日趨智能化。一項由國際數家公司組成,1990年開始,歷時5 a,耗資950萬美元開發的集成鉆井系統(IDS)和集成鉆井作業系統(IDO)獲得成功,也是鉆井系統及操作智能化的體現。而近年地面自動控制的導向鉆井工具和隨鉆地層評價測試系統(FEMWD)開發成功,更體現了工具和作業智能化趨勢。
完全智能鉆井系統特點為:
1)可以知道鉆頭所在位置,智能識別儲層實際情況。
2)可以連續完成鉆井任務,而旋轉鉆井系統需要人為干預。
3)當地面預測存在較大誤差時,可以智能設計相應軌道保證中靶。
4)對于一些特殊儲層,可以智能設計相應靶區軌道,實現高效開發。
2 二維智能著陸井眼軌道設計
適用于面積大且產狀規則、油氣層性質穩定、埋藏深度預測存在一定誤差的油氣藏。
2.1安全圓柱與靶區設計
為防止實際井眼軌跡與設計井眼軌道偏差過大而導致脫靶,設計了安全圓柱與靶區,一旦井眼軌跡穿出這一范圍就重新設計井眼軌道,如圖2所示。
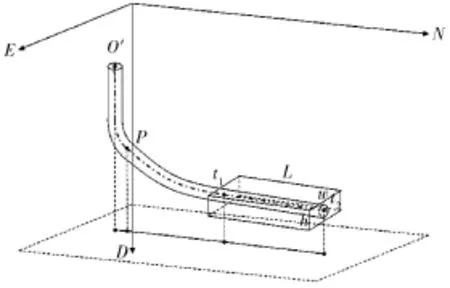
圖2 二維井眼軌道安全圓柱與靶區
安全圓柱是以設計著陸井眼軌道O′Pt1為軸線、r為半徑的圓柱體。靶區的設計遵循行業技術規范,以L為靶區長度,h為靶區高度,w為靶區寬度。
由圖2可以看出:由于不需要進行扭方位,所以為二維井眼軌道,在水平投影面上可以看出井眼軌道的投影表現為1條直線,P為當前鉆頭所在位置,Pt1為著陸部分,t1為入靶點,t2為設計終止點。
2.2入靶井斜角的計算
通常地層是傾斜的,可以用地層傾角來表示其傾斜程度,用下傾方位來表示其傾斜方向。為了有效開發儲層,水平井段應始終保持在儲層中。雖然深度預測出現誤差,但儲層面積大,產狀規則,油層性質穩定,不講究嚴格的入靶方位,可按原設計方位進行二維著陸[8],若原設計方位角為Φ,入靶點處儲層的下傾方位角為Ψ,儲層的地層傾角為β,如圖3所示。
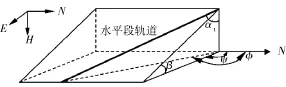
圖3 儲層產狀參數
則入靶井斜角為
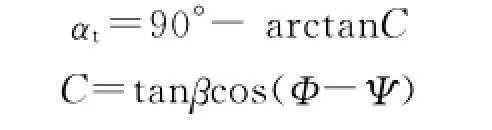
2.3計算井眼軌道參數
2.3.1判斷是否需要更換鉆具
設P為當前井底,t為入靶點,已知P點處空間坐標(NP,EP,DP),井斜角αP,方位角Φ;t點處空間坐標(Nt,Et,Dt),井斜角αt,方位角Φ。以Pa作為穩斜調整段,at為圓弧段,計算圓弧段曲率半徑來判斷是否需要更換鉆具,如圖4所示。
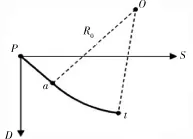
圖4 穩-增入靶垂直剖面
圖中幾何關系滿足

消去LPa項,得

將井下鉆具最大造斜率對應的曲率半徑Rmin與R0進行比較。當Rmin<R0時,設計穩-增-穩-增軌道;當Rmin≥R0時,造斜力不足,需要更換更大造斜能力的井下鉆具。
2.3.2計算相關參數
若Rmin<R0,先以Pa作為穩斜調整段,再通過ab段造斜到αQ,續以bQ為穩斜段,一旦發現油氣顯示立即增斜到αt,由靶點t進入儲層中部,如圖5所示。
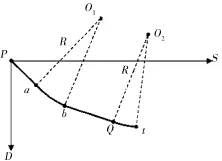
圖5 二維著陸井眼軌道垂直剖面
欲準確進入儲層中部,需滿足以下關系式,即
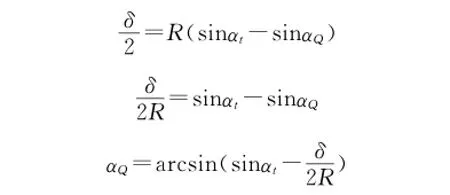
式中:δ為入靶點處儲層厚度,m;α為各點井斜角,(°);R為造斜率對應的曲率半徑,m。
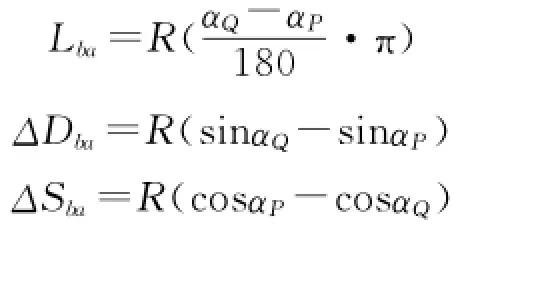
1)Pa段。

整理,得

分離LPa,得

2)ab段。
3)Qt段
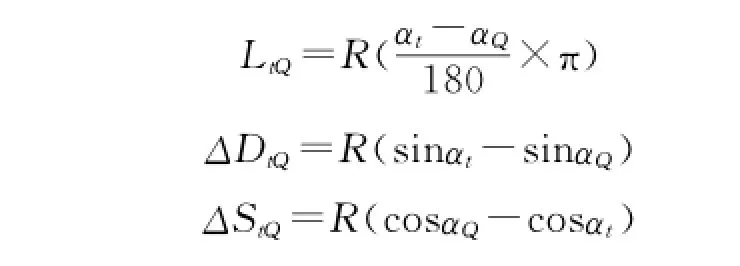
4)bQ段。
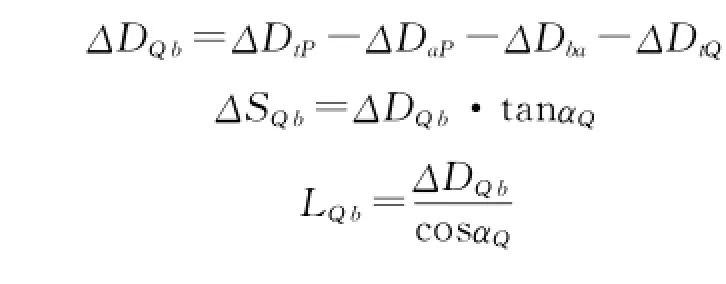
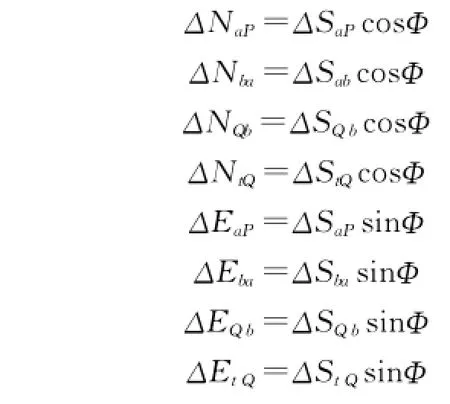
空間坐標變化
設計結果如表1所示。
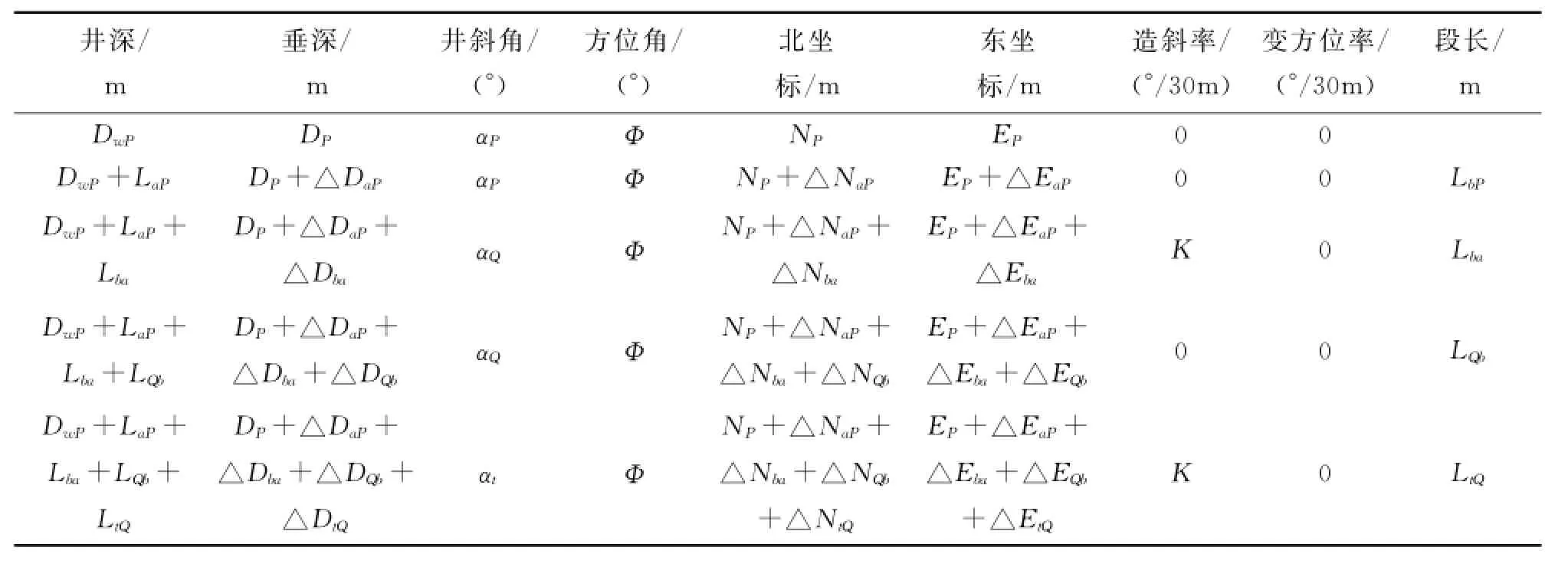
表1 二維著陸井眼軌道設計結果
2.4軌道姿態的自動調整
已知最近兩測點井深L1、L2,井斜角α1、α2,方位Φ1、Φ2,則可計算當前鉆具的變井斜能力和變方位能力Kα、KΦ為
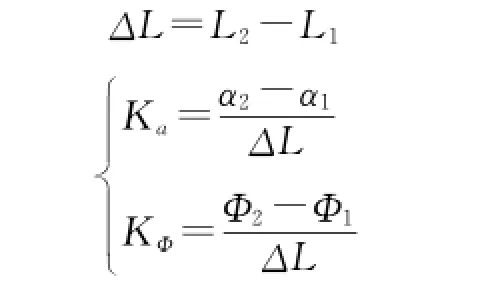
將Kα、KΦ與該井段設定值Kαx、KΦx比較,作差得到ΔKα、ΔKΦ,由控制器計算所需側向力的大小和方向并下令給偏置執行機構;偏置執行機構改變鉆具受力情況后,再次測量Kα、KΦ并與該井段設定值Kαx、KΦx比較,不斷修正至滿足精度要求。其閉環控制系統如圖6所示。
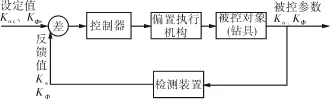
圖6 軌道修正閉環控制系統
3 結論
1)完全智能鉆井系統是未來水平井鉆井技術發展的方向,提出的二維井眼軌道模型能夠充分反映出智能鉆井的技術特點和需求,并具有通用性,可廣泛應用于斜直井、定向井、水平井的軌道設計、監測及修正設計。這種新的數學模型和設計方法為智能鉆井技術的推廣和應用奠定了基礎。
2)文中的計算公式在數學上都是精確解,適用于設計由直線段和圓弧段所組成的各種井身剖面,通過軌道修正閉環控制系統,可獲得較好的井身質量。
[1]張紹槐.智能油井管在石油勘探開發中的應用與發展前景[J].石油鉆探技術,2004,32(4):1-4.
[2]王以法.人工智能鉆井實時專家控制系統研究[J].石油學報,2001,22(2):83-86.
[3]劉清友.未來智能鉆井系統[J].智能系統學報,2009,4 (1):16-20.
[4]岳登進,馮明.過去10年國外鉆井技術的重要進步[J].鉆采工藝,2001,24(4):5-7.
[5]石崇東,張紹槐.智能鉆柱設計方案及其應用[J].石油鉆探技術,2004,32(6):7-10.
[6]石崇東,李琪,張紹槐.智能油田和智能鉆采技術的應用與發展[J].石油鉆采工藝,2005,27(3):1-4.
[7]祝效華,劉清友,李紅巖,等.井眼軌跡預測理論及方法研究[J].天然氣工業,2004,24(4):38-40.
[8]劉修善.井眼軌道幾何學[M].北京:石油工業出版社,2006.
(2011ZX05036-002)
Research on Three dimensional Welborel Trajectory Design and Correction Method Based on Intelligent Drilling
LIUWeikaia,YAN Tiea,BI Xuelianga,XUHaisub,ZHANG Nana,YU Xiaowena
(a.National Engineering Laboratory of Oil and Gas Drilling Technology;b.Key Laboratory of Enhanced Oil Recovery of the Ministry of Education,Northeast Petroleum University,Daqing 163318,China)
Fully intelligent drilling system is the future development direction of the directional drilling technology its underground system can intelligently identify the reservoir conditions. When the ground prediction error is large,fully intelligent drilling system can be used to automatically design the corresponding trajectory to complete the accurate construction target.Under the premise of obtaining the actual geological information,two-dimensional intelligent trajectory is designed for the existence of large area reservoir with depth error.In the process of drilling,the trajectory correction closed-loop control system is designed to effectively control the coincidence rate between the actual drilling wellbore trajectory and the designed wellbore trajectory.The proposed two-dimensional wellbore trajectory model can fully reflect the characteristics and requirements of intelligent drilling technology and can be widely used in the slant well,directional well,horizontal well trajectory design,and monitoring and correction design,making it more versatile.This new mathematical model and design method also laid the foundation for the promotion and application of intelligent drilling technology.
intelligent drilling;two-dimensional trajectory design;two-dimensional trajectory correction
TE928
A
10.3969/j.issn.1001-3482.2015.10.011
1001-3482(2015)10-0046-04
①2015-04-08
黑龍江省教育廳科學技術研究項目“基于完全智能鉆井系統的井下井眼軌道的智能設計及修正理論研究”
(L13H-Q13038)
劉維凱(1974-),男,黑龍江龍江人,講師,博士,主要從事油氣井工藝理論與技術研究,E-mail:lwkzdd@sina.com。
①2015-04-12
國家科技重大專項“大型油氣田及煤層氣開發”子課題“煤層氣水平井、多分支水平井鉆井技術研究”
陳智(1975-),男,湖北武漢人,高級工程師,碩士,主要從事石油機械研究與應用工作,E-mail:1499730069@qq.com。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
