地下牽引機器人行進效率分析
2015-08-04 09:54:51陳文征王宏偉馬汝濤趙力云陶京峰
石油礦場機械 2015年10期
陳文征,王宏偉,馬汝濤,李 強,趙力云,陶京峰
地下牽引機器人行進效率分析
陳文征1,王宏偉2,馬汝濤2,李強1,趙力云1,陶京峰1
(1.中國石油技術開發公司,北京100028;2.中國石油集團鉆井工程技術研究院,北京102206)①
地下牽引機器人在行進過程中需不斷與地層接觸,若接觸點的地層有較大的切向變形,將影響機器人的行進效率,進而影響整體作業進度。為探索該問題,將機器人視為多體節結構,假設其行進過程中始終受阻力作用。通過分析接觸面的切向變形發現:地層越容易發生切向變形、牽引力越大時,機器人行進效率越低,甚至可能停止行進;體節的數量越多時,機器人行進效率越高;體節越多的機器人所能提供的牽引力也越大。該結果對牽引機器人的結構設計和運動分析具有指導作用。
牽引機器人;多體節;接觸變形;行進效率
地下牽引機器人是一種用于地下環境中執行拖放線纜或管柱、探測信息等作業的特種機器人,其應用涵蓋石油鉆井、搶險救援、管道鋪設等領域[1-4]。部分牽引機器人在管道中工作,應用于運送測井儀器的水平井牽引器、管道檢測機器人等[5];另有很大一部分牽引機器人需直接面對原始地層,需一邊鉆掘,一邊拖曳管線前行,例如“穿地龍”工具、拱泥器、Digbot等[6-10]。由于地下巖土空間的組成復雜、非均質性突出,研制能夠在巖土層中高效行進的牽引機器人是一項富于挑戰的龐大工程。目前,國內外眾多科研機構和公司正在這一技術領域激烈角逐,提出了大量創新的概念和思路。日本中央大學Hayato Omori等人提出了用于月壤鉆探的小型鉆掘機器人設想,并完成了室內試驗[2];美國Honeybee Robotics的Kris等人提出了外星深鉆的機器人概念,并進行了原理測試[11];國內哈爾濱工業大學、西北工業大學、哈爾濱理工大學、同濟大學等均在蠕動仿生機器人領域進行了探索[4,12]。
值得注意的是,目前國內外所報導的文獻絕大部分集中于機器人的機械結構設計、牽引機器人受力分析、控制策略研究等方面,但罕有報道關注地層特性對于機器人鉆進效率的影響。另一方面,牽引機器人通常為多節式結構,常見的為2節式和3節式,但并未有文章說明這種結構設計的依據。
本文將考慮牽引機器人與地層的相互作用,進而分析影響機器人行進效率的因素,并初步分析分節式結構的合理性,可為這類地下牽引機器人的運動分析和結構設計提供參考。
1 結構簡化及動作流程
牽引機器人一般由多個環節組成,最前端為鉆頭(或不具備破巖能力的導引頭),其后跟隨轉向機構、進給機構、支撐機構、探測元器件等。鉆頭用于破碎地層形成孔道;轉向機構用于控制鉆頭行進方向;進給機構用于為鉆頭提供軸向推力;支撐機構用于支撐孔壁并依靠產生的摩擦力抵消鉆頭的軸向推力。比較典型的結構如哈爾濱工程大學提出的拱泥器、美國NASA等提出的地外行星鉆探器、日本中央大學提出的月壤鉆探器等,如表1所示。
常見的牽引機器人主體結構類似,移動方式基本都采用仿尺蠖的蠕動前進方法。為簡化模型,本文約定:牽引機器人結構中每一個能夠相對其他環節發生軸向位移的環節稱為1個“體節”,那么,牽引機器人可簡化為連接在一起的數個體節(如圖1所示)。每個體節被視為完全相同的結構,自右至左依次標識為體節1和體節2。
2 兩體節牽引機器人行進效率
采用往復伸縮前行的機器人行進效率通常定義為[13-14]

式中:Le為實際行進距離,mm;Ls為設計行程,mm。
但式(1)只適用于兩體節機器人,即僅包含體節1和2,二者之間通過伸縮機構連接。

表1 不同機構牽引機器人基本結構對比

圖1 簡化為體節結構的牽引機器人
3 孔壁摩擦力與切向力
當牽引機器人在較軟的地層中工作時,其支撐機構接觸孔壁后,接觸部位的孔壁將發生變形,并產生摩擦力。分析該情況下牽引機器人的運動過程,將每一體節的運動簡化為閉合、移動、張開3種狀態。閉合狀態時,支撐機構縮回;移動狀態時,體節沿孔壁向前滑動;張開狀態時,支撐機構張開,對孔壁施加法向力。
基于庫倫模型,當孔壁受到法向力Fn時,將通過接觸點向機器人施加摩擦力Ff,即

式中:μ為接觸位置靜摩擦因數,無量綱。
Ff的方向隨體節的運動趨勢而變化,可能向后或向前。
為了解孔壁變形對支撐機構受力的影響,進而分析其行進效率,本文將從接觸模型角度入手,考慮引入切向接觸柔度分析機器人的受力,則有

式中:Ft為切向力,此處與Ff相等;δ為孔壁的變形量,mm。
假設孔壁變形呈線性規律變化,則式(3)改寫為

式中:kt為接觸位置處孔壁的剛度。
若以δb表示向后的變形量,δf表示向前的變形量,則有

式中:μb和μf分別為向后和向前的摩擦因數。
4 雙體節機器人行進效率分析
圖2給出了雙體節機器人的1個行進周期。起始點體節2為張開狀態,體節1為閉合狀態,且體節1正要開始移動。給定阻力Fe,分析2個體節的運動.
參考圖2a~2b,體節1剛要移動時,體節2在外力作用下發生向后的微小位移,也即體節2與孔壁接觸部位發生了切向變形,記為-δ(2)=-Fe/kt;然后體節2可提供足夠大的摩擦力支持體節1向前移動直至達到最大行程。
參考圖2c~2d,體節1到達行程終點后,張開支撐機構,體節2閉合。體節2剛要移動時,體節1亦在外力Fe作用下發生向后的微小位移,記為-δ(1)=-Fe/kt,然后體節2在進給機構作用下向前移動1個行程Ls。
這一過程中機器人實際行進的距離為

據此求解機器人行進效率為

由式(6)可以發現:即使雙體節機器人的每個體節形狀不同,導致體節的微小移動有所差別,但最終的表達形式并不受影響。

圖2 雙體節機器人行進周期
5 多體節機器人行進效率分析
5.1每個體節逐次運動
針對具有n個體節的牽引機器人,若各個體節按次序移動,則可以判定,機器人最終的行進效率為

若各個體節產生的微小位移完全相同,假設其值為d,則

5.2多個體節移動而其他體節固定
下面考慮受均勻外力Fe時,具有n個體節的機器人中的m 個體節發生移動(m<n)、m+1之后的體節不發生運動的情況,如圖3所示。

圖3 具有n個體節的牽引機器人受力簡圖

給定初始條件:每個體節已具有初始的微小位移δ(i),分析機器人受力。
根據初始假設,m個體節發生移動,體節m+1及之后的體節保持固定,則有

由于所受外力均勻,類比雙體節機器人移動時各體節最終位移的微小變化,認為體節m+1及之后的體節變形呈等差序列變化,差值設為d,則對n-m個未移動的體節,其接觸的孔壁變形量為

若切向力與孔壁變形呈線性關系,根據δ(i)取值不同,切向力表達方式亦有所區別,有
聯立式(9)~(12),可得

從中解得

則機器人的行進效率為

根據式(9)~(15)分析牽引機器人的行進效率,如圖4~5所示。
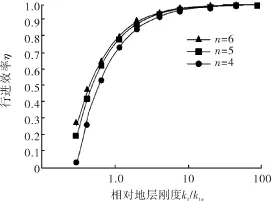
圖4 牽引機器人行進效率與地層柔度關系
由圖4可知:對牽引機器人而言,地層柔度越大,即地層越容易切向變形,則其行進效率越低;特殊情況下,可能因地層原因造成其行進效率低至理論值的20%甚至更低。圖4中曲線也同時說明了體節數量對行進效率的影響,體節數量適當增加,行進效率將隨之提升。
圖5用于說明牽引力對于行進效率的影響,顯然牽引力越大時,行進效率越低。當牽引力達到某一數值時,牽引機器人將無法移動。
同時,圖5也顯示了體節數量對行進效率的影響:體節越多,行進效率也越高,這種趨勢在牽引力較大時體現得更為明顯;另外,行進效率相同時,體節越多的牽引機器人所能提供的牽引力也越大。
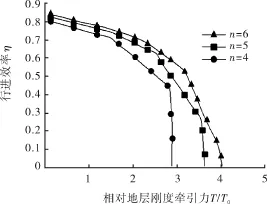
圖5 牽引力與體節數量關系
6 結論
1)地下牽引機器人是一種重要的特種作業機器人,應用于石油鉆井、搶險救援、管道鋪設等多種行業。能夠在地層中高效穿行的機器人是具有挑戰性的研究領域,已引起國內外眾多科研機構的重視,但目前尚無成熟的產品。
2)牽引機器人行進效率是指機器人每個動作周期中前進的距離與其設計行程的比值。在容易發生切向變形的的地層中,牽引力越大,機器人行進效率越低。
3)常見牽引機器人的基本結構可簡化為多個體節,其他因素相同的情況下,機器人體節的數量越多,行進效率越高。
4)行進效率相同的情況下,機器人體節越多,所能提供的牽引力也越大。
[1]Kubota T,Nagaoka K,Tanaka S.Earth-worm typed Drilling Robot for Subsurface Planetary Exploration [C]//Sanya:International Conference on Robotics and Biomimetics.2007.
[2]Omori H,Murakami T,Nakamura T,et al.Development of a novel bio-inspired planetary subsurfaced explorer:initial experimental study by prototype excavator with propulsion and excavation units[C].IEEE/ASME Transactions on Mechatronics,2013.
[3]袁勝發.氣動潛地機器人的研究設計[J].液壓與氣動,2002(1):20-21.
[4]楊鵬春,簡小剛,王葉鋒,等.地下鉆進機器人研究與發展趨勢[J].機械設計,2012,29(11):1-4.
[5]白相林.水平井牽引機器人關鍵技術研究[D].哈爾濱:哈爾濱工業大學,2009.
[6]張忠林.“穿地龍”機器人轉向機構與位姿檢測研究[D].哈爾濱:哈爾濱工程大學,2006.
[7]張英.水下仿生拱泥機器人及其關鍵技術研究[D].武漢:武漢理工大學,2005.
[8]閆成罡.基于MATLAB的拱泥機器人控制仿真研究[D].哈爾濱:哈爾濱理工大學,2007.
[9]李燕.仿蚯蚓在土質環境下拱洞機器人的研究[D].西安:西北工業大學,2004.
[10]簡小剛,王葉鋒,楊鵬春.基于蚯蚓蠕動機理的仿生機器人研究進展[J].中國工程機械學報,2012,10(3):359-364.
[11]Zacny K.Wireline Deep Drill for Exploration of Mars,Europa,and Enceladus[C].IEEE Transactions on Mechatronics,2013.
[12]謝方明.基于蠕動原理仿生攻泥機器人虛擬樣機制作研究[D].哈爾濱:哈爾濱理工大學,2006.
[13]Zarrouk D,Fearing R S.Cost of Locomotion of a Dynamic Hexapedal Robot[C].IEEE International Conference on Robotics and Automation.Karlsruhe,Germany,2013.
[14]Kim B,Lee MG,Lee Y P,et al.An earthworm-like micro robot using shape memory alloy actuator[J]. Sens.Actuators A,Physical,2006,125(2):429-437.
Locomotion Efficiency Analysis of Subsurface Tract Robots
CHENWenzheng1,WANGHongwei2,MA Rutao3,LI Qiang1,ZHAO Liyun1,TAO Jingfeng1
(1.China Petroleum Technology and Development Corporation,Beijing 100028,China;2.CNPC Drilling Research Institute,Beijing 102206,China)
Subsurface tract robots are fit for purpose devices used for laying cables and pipe strings.The robot inevitably contacts the wall of the borehole while moving through into the formation.If the formation allows tangential deformation,it will affect the locomotion efficiency of the robot,therefore exert an influence on the total operational procedure.In order to figure out how the efficiency is affected by the deformation,the tract robot was assumed to has a simplified multi-section structure,subjecting to constant resistances during moving forward.Analysis on the model reveals that the locomotion efficiency is lower or even close to zero under a more tangential flexible formation or higher tract tension.Meanwhile,the more sections the robot has the higher efficiency it is.In addition,a robot with more sections could endure more tract tension was also illustrated.The results are anticipated to be useful for analysis and designing of subsurface tract robots.
subsurface tract robot;multi-section;contact model;locomotion efficiency
TE928
A
10.3969/j.issn.1001-3482.2015.10.005
1001-3482(2015)10-0020-05
①2015-04-22
陳文征(1982-),男,山東臨沂人,工程師,碩士,主要從事石油裝備新技術研發與技術支持工作,E-mail:chenwz @cptdc.com。
①2015-05-21
王顯林(1987-),男,四川江油人,工程師,主要從事鉆桿的研發制造工作。
猜你喜歡
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中華詩詞(2020年1期)2020-09-21 09:24:52
甘肅教育(2020年14期)2020-09-11 07:57:42
電子制作(2018年18期)2018-11-14 01:48:24
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
山東工業技術(2016年15期)2016-12-01 05:31:22
時代英語·高二(2015年1期)2015-03-16 00:08:11
中國衛生(2014年11期)2014-11-12 13:11:32
