井架排管機器人研制
2015-08-04 08:56:53蔣壯強郝麗軍南陽二機石油裝備集團有限公司河南南陽473006中國石油技術開發公司北京0008
石油礦場機械 2015年12期
蔣壯強,崔 凱,張 勇,郝麗軍,張 昶(.南陽二機石油裝備(集團)有限公司,河南 南陽473006;.中國石油技術開發公司,北京0008)
井架排管機器人研制
蔣壯強1,崔凱2,張勇1,郝麗軍2,張昶1
(1.南陽二機石油裝備(集團)有限公司,河南南陽473006;2.中國石油技術開發公司,北京100028)
排管機器人用于在二層臺排放架與井口之間抓取與排放鉆桿,是鉆井平臺鉆桿自動排放系統中最為繁忙的裝置,在提高鉆井安全性及經濟性方面發揮著重要的作用。介紹了井架排管機器人的總體機械結構及主要技術參數、液壓控制原理。本設備適合于X-Y型排管架結構,具有結構簡單、操作靈活可靠、運動穩定、操作空間大等優勢,適合于陸地橇裝鉆機平臺、海洋鉆機平臺立根自動排放操作。
排管機器人;陸地鉆機;海洋鉆機
隨著對鉆井效率及安全性要求的不斷提高,鉆機自動化已成為石油鉆機未來發展的方向。井口的機械化裝置是其自動化鉆機的關鍵部分,而實現石油鉆機井口機械化、自動化的關鍵則是鉆桿排放系統[1]。
井架排管機器人是針對陸地、海洋鉆井作業中的起下鉆排管作業而研制的自動化專用鉆機配套設備,它能夠將指梁內的立根移運到井口設定位置并交給頂驅,或者將頂驅上的立根按要求排進指梁內,為鉆機的排管作業安全性提供了可靠的保證,消除了起下鉆作業對二層臺井架工的依賴。在起下鉆作業過程中,該裝置承擔對鉆桿夾持、提升、下放、平移和回轉等操作,實現鉆具在鉆臺與二層臺之間的自動輸送、排放、儲運等;還可與動力輔助鼠洞、鐵鉆工配合完成單根接成立根操作,不再需要人工直接參與,從而讓鉆井工遠離危險區域。自動排管裝置減輕了工人勞動強度、降低了井架工的操作風險,同時提高了鉆桿排放的自動化水平和工作效率,是實現安全、健康鉆井和提高鉆井效率的有效途徑[2-3]。
國內對鉆桿自動排放系統的研究起步較晚,只有少數單位做過一些技術上的研究和設計。到目前為止,國內研發的鉆桿自動排放系統還沒有形成工業性產品,因此,國內絕大部分陸地鉆機以及海洋鉆機的鉆桿排放還是采用傳統的人工操作方式。
南陽二機石油裝備(集團)有限公司經過多年的技術攻關,提出了一種安裝在二層臺中間走道下方的排管機器人的設計方案,并已制作出樣機。
1 總體結構方案設計
1.1技術參數
液壓系統工作壓力8MPa
機械臂水平伸展距離3m
滑移系統最大速度300mm/s
旋轉機構最大旋轉速度30°/s
回轉角度0~180°
二層臺安裝高度24.5mm
適用管柱規格73.0~139.7mm
1.2總體結構
排管機器人主要用于在井口與鉆臺排放架之間往返自動移送鉆桿立根,還可與鉆桿自動上下鉆臺系統、動力輔助鼠洞、鐵鉆工配合完成離線單根接成立根操作,而不需要借助起升系統,不影響鉆進。XY型排放架內可以存放較大數量的鉆桿,移動鉆桿方便,排放架指梁可以調節,可以滿足不同直徑管柱的要求,故海洋/陸地鉆井平臺廣泛采用XY型排放架。本文設計方案適合X-Y型排管架結構。
排管機器人主要由滑移旋轉機構、連桿機構、機械臂總成、移動導軌等部分組成,如圖1所示,整個裝置放置在二層臺中間走道下面。滑移旋轉機構是鐵架工的核心承載模塊,設計有移動小車及旋轉機構。工作時,移動小車可帶動整個裝置在中間走臺下面往復運動,以便在不同的排放架位置進行取放鉆桿立根操作;回轉機構可使連桿機構及機械手模塊繞回轉軸旋轉180°,實現機械手的朝向在井口、左排放架、右排放架間的轉換。機械手面向井口時,允許機械手在井口進行立根操作;面向排放架時,允許機械手在指梁內取放立根。

圖1 排管機器人整體結構
1.3滑移旋轉機構
滑移旋轉機構的功能是實現裝置的整體平移及連桿機構與機械手模塊的旋轉運動,如圖2所示。
滑車架是滑移旋轉機構的保護外殼,內部設有驅動輪總成、從動輪總成、液壓馬達、回轉機構、回轉缸、齒輪機構。液缸馬達為滑動小車提供移動的動力,回轉缸為機械臂轉動提供轉矩[4]。
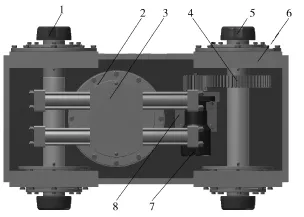
圖2 滑移旋轉結構
1.4機械臂總成
機械臂總成主要由旋轉座、主動桿Ⅰ、主動桿Ⅱ、從動桿Ⅰ、從動桿Ⅱ、伸縮液壓缸、連桿座、驅動快、機械手總成組成,主要實現機械手的伸出與收回等動作,如圖3所示。
該總成頂部是旋轉座,通過銷軸與旋轉機構及連桿相連,是機械臂動作的傳力者。當液壓缸伸長時,推動主動桿Ⅱ向前擺動,在連桿座及驅動塊的作用下,主動桿Ⅰ、從動桿Ⅰ、從動桿Ⅱ及機械手同步向前移動。回轉缸轉動時,回轉軸將扭轉力矩傳遞給機械臂總成,實現機械臂總成0~180°旋轉。
此機械臂結構僅用一個液壓缸,便可實現4根連桿的聯動,且液壓缸較小的行程可實現機械手較大的水平位移;連桿機構的平行四邊形結構保證了機械手始終處于水平狀態。
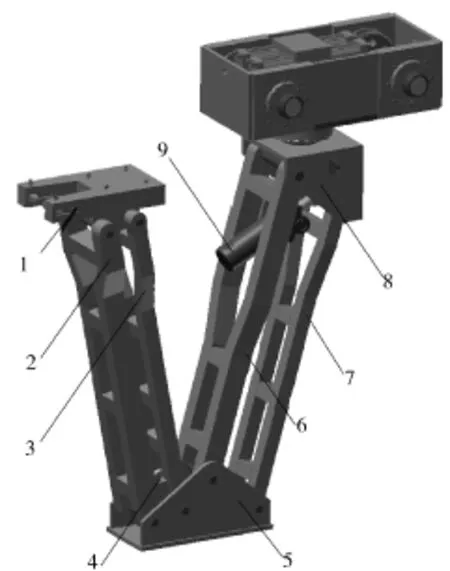
圖3 機械臂總成結構
1.5機械手總成
機械手總成主要由盒體、液壓缸、彈簧座、彈簧、連桿、擋塊等部件組成,如圖4所示。液壓缸縮回時,彈簧作用于彈簧座及連桿,使擋塊處于關閉狀態,立根被限定在機械手前段的U形槽內。當機械手端部的液壓缸伸出時,推動彈簧座及連桿,使擋塊向內側旋轉,擋塊打開,立根可以與機械手脫離。
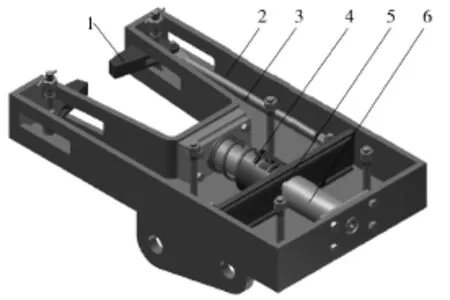
圖4 機械手總成結構
2 液壓系統及控制原理
液壓系統及控制原理如圖5所示,液壓系統工作壓力8 MPa,采用開式循環結構。各個液壓元件順序動作,由PLC控制電磁閥來控制液壓缸液壓馬達的動作,同時由行程開關以及傳感器把信號反饋給PLC來控制機械結構運動位置。
為防止重力超速,在伸縮臂運動回路上安裝限速閥,小車移動回路安裝位移傳感器及緩速閥。
通過遠程監控可視系統,操作人員可在司鉆房內對取放立根進行遠程控制,不僅提高了工作效率,而且降低了鉆井工人的勞動強度。
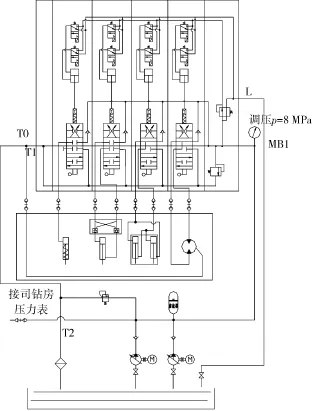
圖5 液壓系統原理
3 創新點
井架排管機器人具有結構簡單、體積小、質量輕、動作穩定可靠、安裝方便等特點。創新點如下:
1)滑移旋轉機構采用獨特的箱式結構,將移動、旋轉兩個功能集成在一個箱體內,結構緊湊,安裝方便。此結構已申請實用新型專利[5]。
2)機械臂總成采用全新的連桿結構,較小的液壓缸行程便可實現機械手較大的位移。
4 結論
1)通過樣機試驗,排管機器人的動作穩定可靠,符合設計要求。
2)滑移旋轉機構采用獨特的箱式結構,將移動、旋轉兩個功能集成在一個箱體內,結構緊湊,安裝方便。全新的機械臂結構,使連桿運動輕便靈活。
3)在進行液壓系統設計時,未過多考慮執行件的速度控制問題。
4)排管機器人對提高鉆井自動化、安全性、經濟性等方面具有重要意義,可以推廣應用于陸地鉆機、海洋鉆井平臺。
5)在機械手夾持方式及液壓回路控制方面應繼續進行研究,提高機械手夾持鉆桿的性能,并實現執行件速度的動態控制。
[1]張先余.自動化鉆機二層臺鉆桿排放技術的研究[D].東營:中國石油大學,2012.
[2]劉文慶,崔學政,張富強.鉆桿自動排放系統的發展及典型結構[J].石油礦場機械,2007,36(11):74-77.
[3]崔學政,劉文慶,肖文生,等.海洋鉆井平臺立柱式排管機設計[J].石油礦場機械,2010,39(1):45-49.
[4]中國有色工程設計研究總院.機械設計手冊:3卷[K].北京:化學工業出版社,2008.
[5]蔣壯強,王德余.新型滑移旋轉小車:中國,CN204457498U [P].2015-07-08.
Research and Manufacture of Mast Handling Robot
JIANG Zhuangqiang1,CUI Kai2,ZHANG Yong1,HAO Lijun2,ZHANG Chang1
(1.RG Petro-Machinery(Group)Co.,Ltd.,Nanyang 473006,China;2.China Petroleum Technology&Development Corporation,Beijing 100028,China)
Handing robot plays a very important role in improving safety and cost cutting of drill-ing rig,which is used for handling drilling pipes between the well center and set back area.Pipe-racking on drill floor is the most frequent procedure in automated pipe racking operation of drill-ing platform.In this paper,the general design of mast handing robot is provided,main parameter s of the mechanisms are introduced,hydraulic system chart and control mode of the mechanisms are presented.The device introduced in this paper is fits for X-Y type racking platform,which has many advantages like simple structure,simple and reliable operation,working stability,larger working range.The device can be used on land drilling rig and sea drilling rig for pipe racking op-eration.
handing robot;land drilling rig;sea drilling rig
TE928
B
10.3969/j.issn.1001-3482.2015.12.014
1001-3482(2015)12-0055-04
2015-08-05
河南省重大科技專項“智能化斜直井鉆機關鍵技術研發及產業化”(141100210700);“自升式海洋鉆井平臺鉆機的研發及產業化”(111100210500)
蔣壯強(1983-),男,河南南陽人,工程師,碩士,現從事石油鉆井設備的研究開發工作,Email:jzhuangqiang2014 @163.com。
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
中華詩詞(2019年7期)2019-11-25 01:43:04
電腦報(2019年40期)2019-09-10 07:22:44
模具制造(2019年3期)2019-06-06 02:10:54
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
科技知識動漫(2016年8期)2016-07-29 20:40:09
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49
