下承自行式移動模架過連續(xù)梁施工工藝研究
2015-08-03 08:47:28肖植可朱耀光
黑龍江交通科技 2015年7期
肖植可,朱耀光
(中鐵八局昆明鐵路建設(shè)有限公司)
1 下承自行式移動模架概述
下承自行式移動模架分為兩種,第一種為PC 梁位于支架主梁之下的移動模架,第二種為模架主梁在PC 梁之上縱移的移動模架,采用的是第一種,其構(gòu)成主要如下:主框架總成、墩旁托架、移位臺車、前輔助支腿、中輔助支腿、后輔助支腿、外模系統(tǒng)、內(nèi)模系統(tǒng)、附屬設(shè)施、橋面走道及操作平臺、液壓系統(tǒng)、電氣系統(tǒng)。
2 技術(shù)難點及工作原理
2.1 需解決的技術(shù)難點
(1)如何解決過連續(xù)梁時移動模架自身支撐受力問題
下承自行式移動模架操作時,自身重量在前輔助支腿、中輔助支腿、后輔助支腿、支撐托架直接相互轉(zhuǎn)換,施工期間由前墩旁托架、后墩旁托架支撐,脫模時前、后墩旁托架承重油缸完全回收,此時主框架及模板的重量轉(zhuǎn)換由前中后輔助腿支撐;利用縱移油缸頂推前、后墩旁托架前進至下一橋墩就位;前、后墩旁托架上的橫移油缸頂推使前、后墩旁托架與橋墩就位后解除中輔助支腿、前輔助支腿支撐;后輔助支腿、后墩旁托架、前墩旁托架的油缸回收使移動模架主梁底部的軌道落放在支撐滑道上;而這相互轉(zhuǎn)換需要通過導(dǎo)梁及主梁進行傳導(dǎo),在過連續(xù)梁時,因連續(xù)梁的兩跨跨度遠(yuǎn)遠(yuǎn)大于2倍普通簡支梁的跨度,也就是大于移動模架導(dǎo)梁加上主梁的長度,過時主梁和導(dǎo)梁無法像過普通簡支梁那樣就位在支撐托架上,也就無法實現(xiàn)這種轉(zhuǎn)換,因此必須提供一個新的支點,確保過孔時移動模架自身的安全轉(zhuǎn)換。
(2)如何解決過連續(xù)梁縱移動力驅(qū)動
下承自行式移動模架過孔時的動力驅(qū)動為固定在支撐托架上縱移油缸,透過設(shè)在主梁及導(dǎo)梁下底面的孔板頂推主梁和導(dǎo)梁縱向移動,而在過連續(xù)梁時,因連續(xù)梁的兩跨跨度超過2 倍普通簡支梁的跨度,也就是大于移動模架導(dǎo)梁加上主梁的長度,過時主梁和導(dǎo)梁無法像過普通簡支梁那樣就位在支撐托架上,也就無法利用支撐托架上縱移油缸產(chǎn)生縱移推力,此時,必須重新增加新的動力設(shè)備。
2.2 工作原理
(1)改造原理
通過對移動模架中輔助支腿長度及高度的改造,將過孔時的承載系統(tǒng)由原來的后輔助支腿+墩旁托架組合轉(zhuǎn)換成后輔助支腿+中輔助支腿組合,同時在中輔助支腿下方增設(shè)C 梁走行機構(gòu),將縱移動力從原來墩旁托架上的縱移油缸提供轉(zhuǎn)換由新增的中輔助支腿電機提供。
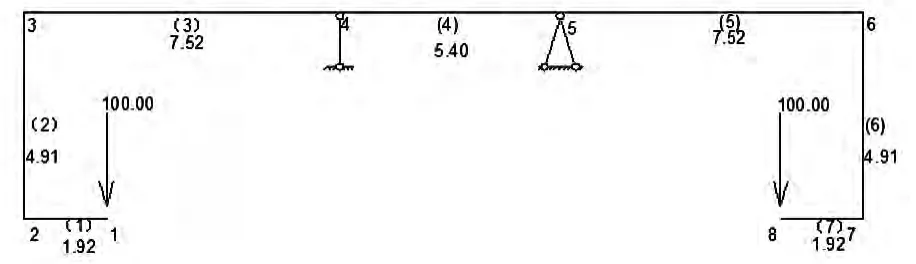
(2)改裝后中輔助腿受力檢算
①受力模型如下圖
彎矩圖
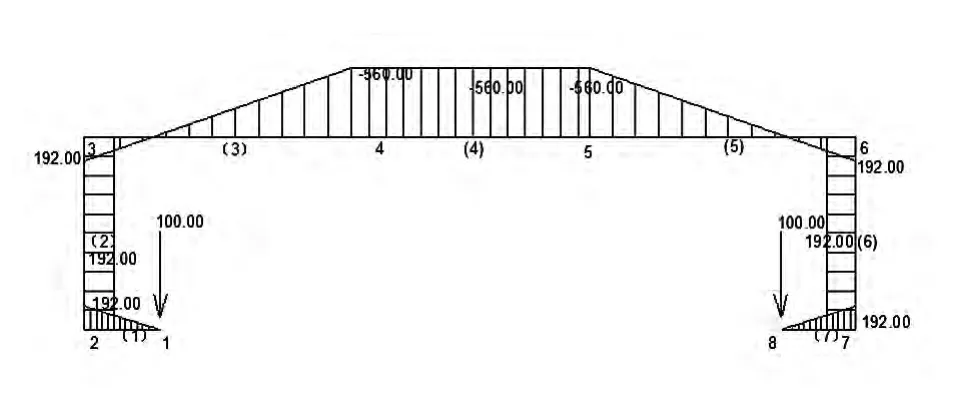
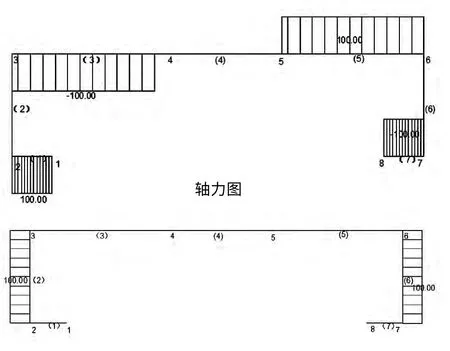
剪力圖
②橫梁加長段箱型截面參數(shù):
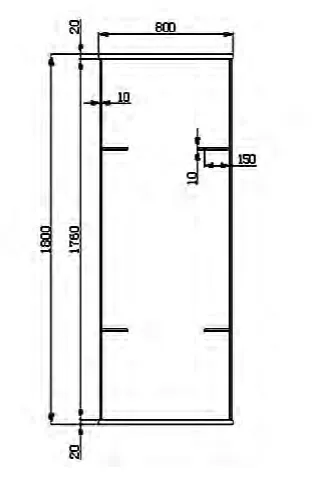
橫梁加長段箱型截面參數(shù)
截面面積:A=73 200 mm2,慣 性 矩:IX=3.58 ×1010mm4,IY=7.34 ×1010mm4,
截面系數(shù):WX=3.979 × 107mm4,WY=1.835 ×1010mm4
正應(yīng)力σ=彎矩/截面系數(shù)=M/WX=560 ×107/3.979×107=140.7 MPa <[σ]=170 MPa(滿足要求)
剪應(yīng)力τ=剪力/2x 截面高度×單側(cè)截面厚度=Q/2h0h=100 ×104/2 ×1 760 ×10=28.4 MPa
③未加高段處截面計算

箱型截面參數(shù)
截面面積:A=49 200 mm2,慣性矩:IX=7.256 ×109mm4,IY=4.19 ×109mm4,
截面系數(shù):WX=1.61 ×107mm4,WY=1.05 ×107mm4
未加高段處最大彎矩:Mmax=214t.m 剪力:Q=100 t
正應(yīng)力σ=最大彎矩/截面系數(shù)=Mmax/WX=214 ×107/1.61 ×107=132.9 MPa <[σ]=170 MPa(滿足要求)剪應(yīng)力τ=剪力/2x 截面高度× 單側(cè)截面厚度=Q/2h0δh=100 ×104/2 × 860 × 10=58.1(滿足要求)
3 工藝流程
總個過連續(xù)梁工藝流程如下:移動模架現(xiàn)澆梁初張拉完成→主梁落回滑道→利用墩旁托架上的橫移油缸橫向開啟主梁→后輔助支腿支撐千斤頂及其走行系統(tǒng)就位→安裝中輔助支腿曲臂增長段→安裝中走行C 梁走行機構(gòu)→調(diào)整后輔助支腿豎向千斤頂使中、后輔走行系統(tǒng)落回走行軌道(此時整個移動模架自身重量由中、后輔助支腿承擔(dān),墩旁托架不在承擔(dān))→拆除導(dǎo)梁(此步驟主要考慮曲線半徑較小的橋梁,非曲線段或者曲線半徑較大時可以不拆除)→調(diào)整墩旁托架上的豎移油缸將主梁與墩旁托架脫離→解除對拉精軋螺紋鋼筋并利用橫向頂推油缸將墩旁托架與墩身分離→整體拆除前后墩旁托架移至下一孔簡支梁墩柱位置并安裝就位(此步驟主要是減輕移動模架自身重量,減少走行機構(gòu)承擔(dān)的重量,也可以將墩旁托架倒掛在主梁上,但必須對走行機構(gòu)進行局部加強)→開啟中輔助支腿上的電機驅(qū)動將移動模架縱向移至連續(xù)梁端頭位置→將移動模架主梁落回墩旁托架上方并將其上縱移油缸與主梁連接到位→拆除中輔助支腿曲臂增長段及中走行C 梁走行機構(gòu)→安裝導(dǎo)梁并將前墩旁托架與導(dǎo)梁連接到位→利用前后墩旁托架上方縱移油缸透過設(shè)在主梁及導(dǎo)梁下底面的孔板頂推主梁和導(dǎo)梁縱向移動倒施工位→橫向合攏再次形成施工平臺。
4 控制要點
4.1 中輔助支腿曲臂增長段及C 梁走行機構(gòu)安裝
中輔助支腿曲臂增長段及C 梁走行機構(gòu)安裝是總個施工過程的關(guān)鍵步驟,總個安裝過程必須嚴(yán)格按照廠家操作規(guī)程進行安裝,采用螺栓的位置連接必須采用扭力扳手進行,采用焊接連接的位置嚴(yán)格控制焊縫的質(zhì)量,系統(tǒng)走行前,必須對所有的電機進行檢查,確保運轉(zhuǎn)方向、運轉(zhuǎn)速度達到統(tǒng)一才進行下一道工序的操作。
4.2 承載系統(tǒng)的轉(zhuǎn)換
總個施工過程中,經(jīng)過了兩次承載系統(tǒng)的轉(zhuǎn)換,第一次承載系統(tǒng)的轉(zhuǎn)換由原來的后輔助支腿+墩旁托架組合轉(zhuǎn)換成后輔助支腿+中輔助支腿組合,第二次重新將其轉(zhuǎn)換回來,總個轉(zhuǎn)換過程,通過設(shè)備自帶的4 個豎向千斤頂完成,操作過程必須嚴(yán)格控制千斤頂?shù)牟僮饔捅茫ㄗh在千斤頂上增設(shè)智能系統(tǒng),由電腦同步控制,如現(xiàn)場無法實現(xiàn),則必須由專人指揮四個油泵的操作,使他們達到絕對的統(tǒng)一,避免因為操作失誤出現(xiàn)偏壓,導(dǎo)致移動模架傾覆或者損壞千斤頂及走行系統(tǒng)。
5 結(jié) 語
通過佛肇城際鐵路桂丹立交特大橋下承自行式移動模架自行通過(30 m +45 m +30 m)現(xiàn)澆連續(xù)梁的工程實例,詳細(xì)的介紹了下承自行式移動模架在通過連續(xù)梁時的需進行的改造及施工全過程,具有極強的可操作性,對類似工程有著積極的指導(dǎo)意義。
[1]黃成造,項貽強,張少錦.移動模架設(shè)計、施工與養(yǎng)護技術(shù)指南[M].人民交通出版社,2009.
[2]橋梁設(shè)計常用數(shù)據(jù)手冊[M].人民交通出版社,2005.