暖體假人溫控系統方案的研究
2015-07-20 11:53:26鄒鉞李書政劉赟
建筑熱能通風空調 2015年3期
鄒鉞 李書政 劉赟
東華大學環境科學與工程學院
暖體假人溫控系統方案的研究
鄒鉞 李書政 劉赟
東華大學環境科學與工程學院
暖體假人是模擬人體與環境之間熱濕交換的儀器設備,在服裝功效研究方面有重要的應用價值。為了找出控制假人溫度的最佳方案,本文提出了兩種暖體假人表面溫度的控制方案,PID控制和固態繼電器通斷控制,運用Labview軟件編程及相應的硬件設備實現對暖體假人表面溫度的控制,簡單分析比較了兩種方案的控制效果,發現PID控制可以更有效并自動地對假人溫度進行控制。文章最后還提出了PID控制的改進優化方案。
暖體假人 溫度控制 PID固態繼電器
0 引言
暖體假人是一種模擬人體散熱的設備,它能在設定的環境條件下,模擬人體、服裝和環境間的熱交換過程,方便地測試服裝整體或局部的熱學性能參數。暖體假人按其制作材料可分為:銅質暖體假人、鑄鋁暖體假人、玻璃鋼暖體假人。按其用途可分為:干熱暖體假人、出汗暖體假人、可呼吸暖體假人和可浸水暖體假人[1]。
暖體假人系統由假人本身和溫度控制系統組成。暖體假人全身應分為頭、軀干、四肢等解剖段至少6段,在每個解剖段上分別密纏加熱絲,在加熱絲上敷設有利于溫度均勻性的鋁膜,然后布置溫度探頭,與溫控系統連接[2]。暖體假人對假人表面溫度均勻性要求非常高,就暖體假人系統來說,影響假人表面溫度均勻性的因素,一方面是假人表面電熱絲及模擬皮膚的敷設,另一方面是對加熱絲的加熱控制(溫度控制),其中將假人溫度控制在設定溫度(模擬人體體表溫度)并保持溫度波動在±0.2℃以內是整個假人表面溫度均勻的基礎[3]。本文就暖體假人的溫度控制提出兩種不同的控制方式,PID控制和固態繼電器控制。
暖體假人的溫度控制系統作為下位機與上位PC機連接,通過RS485-232轉換卡實現與溫度采集卡的通訊[4]。暖體假人的上位機程序是由美國某公司開發的Labview軟件開發平臺編寫,是一種圖形化的編程語言(G語言)和開發環境[5]。暖體假人的下位機是以實時控制溫度和功率測量為核心任務的軟硬件結合的系統。由于各解剖段的工作原理都一樣,只有溫度采樣和控制量輸出的通道地址不同,本文就單獨一個通道的溫度控制來對兩種控制方式進行分析比較。
1 PID溫度控制
1.1 PID控制
PID控制算法是目前工業控制中應用最普遍的控制算法,即比例積分微分控制。PID控制法是一種線性控制方法,它根據設定值SP(t)與實際輸出值PV(t)構成控制偏差e(t),下列公式表示出各參數之間的關系:
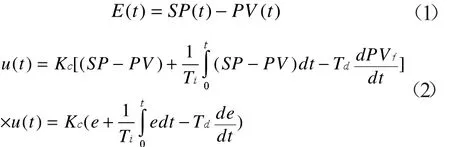
將偏差e(t)的比例、積分和微分通過線性組合構成控制量,對被控對象進行控制,因此稱為PID控制。
PID控制系統原理圖如圖1所示。
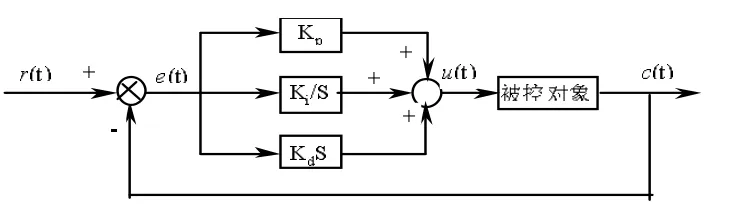
圖1 PID控制系統原理圖
1.2 PID控制系統
整個系統的硬件設備包括:PT100熱電阻、溫度采集模塊、RS485-232轉換卡、NI USB-6008、直流電機調速器、24V供電電源、36V加熱電源。
NI USB-6008可提供8個模擬輸入(AI)通道、2個模擬輸出(AO)通道、12個數字輸入/輸出(DIO)通道以及一個帶全速USB接口的32位計數器。在此控制方案中只需用到一個模擬輸出(AO)通道來輸出連續的電壓信號。
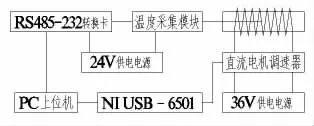
圖2 PID溫度控制系統原理圖
系統中使用的直流電機調速器是電壓控制型的,控制電壓0~5V,與NI USB-6008輸出的電壓信號配合可以實現加熱電壓36V的0%~100%的無極變化,完美控制加熱。
PID溫度控制系統的原理圖如圖2所示。
通過Labview軟件編程,PID控制根據溫度采集卡獲得的溫度數據PV算得控制輸出output,利用NI-DAQmx與NI USB-6008結合的數據采集與輸出實現0~5V電壓的實時輸出,再通過直流變速器轉換為0~36V電壓的實時輸出,從而實現假人表面溫度的精確控制。實際溫度控制實驗的數據如圖3所示。
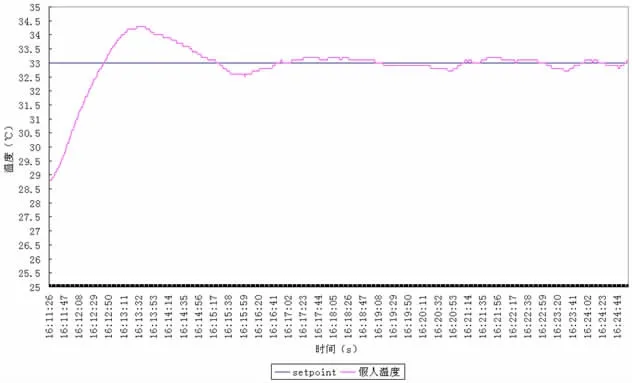
圖3 PID溫度控制系統實時數據
2 固態繼電器通斷控制
2.1 固態繼電器
固態繼電器是一種無觸點電子開關,由分立元器件、膜固定電阻網絡和芯片組成,采用混合工藝組裝來實現控制回路(輸入電路)與負載回路(輸出電路)的電隔離及信號耦合,由固態器件實現負載的通斷切換功能,內部無任何可動部件。主要由輸入(控制)電路、驅動電路和輸出(負載)電路三部分組成[6]。
固態繼電器是小功率控制高功率的電子器件。由于光耦合器的應用,使控制信號所需的功率極低(約十余毫瓦就可正常工作),而且Vsr所需的工作電平與TTL、HTL、CMOS等常用集成電路兼容,可以實現直接聯接。這使SSR在數控和自控設備等方面得到廣泛應用。耦合電路用的元件是光耦合器,它動作靈敏、響應速度高、輸入/輸出端間的絕緣(耐壓)等級高。由于輸入端的負載是發光二極管,這使SSR的輸入端很容易做到與輸入信號電平相匹配,在使用時可直接與計算機輸出接口相接,即受1與0的邏輯電平控制[7]。
2.2 固態繼電器通斷控制
整個系統的硬件設備包括:PT100熱電阻、溫度采集模塊、RS485-232轉換卡、NI USB-6008/6501、固態繼電器、24V供電電源、36V加熱電源。NI USB-6501可提供24個數字輸入/輸出(DIO)通道以及一個帶全速USB接口的32位計數器。在此控制方案中用到一個數字輸出通道執行通斷輸出,用于驅動直流固態繼電器,當模塊發出電壓信號時,固態繼電器負載開關閉合,無信號時,固態繼電器負載開關斷開,以此方式來控制電源加熱的通斷。
固態繼電器通斷溫度控制系統的原理圖如圖4所示。
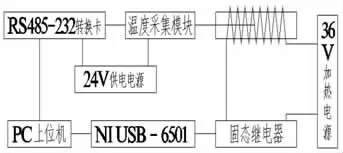
圖4 固態繼電器溫度控制系統原理圖
同樣通過Labview軟件編程,利用NI-DAQmx與NI USB-6008/6501結合的數據采集與輸出實現對繼電器的通斷控制,從而控制了加熱電源的加熱,進而實現溫度的控制。實際溫度控制實驗的數據如圖5所示。
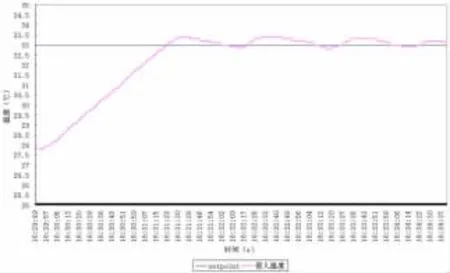
圖5 固態繼電器溫度控制系統實時數據
3 實驗結果分析
PID控制方案是連續量輸出,而固態繼電器控制是開關量輸出,基于Labview的PID控制是完全的自動控制,既可以實現外界環境變動情況下的智能溫度控制,而固態繼電器控制的通斷周期必須由用戶手動輸入才可實現控制,一旦外界環境發生變動,其通斷周期不會自動進行調整,必須經過反復試驗才可求得最佳通斷比,這會大大影響溫度的控制效率。PID控制方案的功率輸出有功功率占得比例小,成本較高,且功率計算時需進行積分計算。固態繼電器控制是通過控制導通時間占輸出周期的比例就來控制加熱功率大小的,功率計算方便。兩種控制方式的功率輸出示意圖如圖6所示。根據溫度實時數據可以非常直觀地看出在溫度相對穩定后PID控制比繼電器控制更接近設置溫度,更符合溫差±0.2℃的要求。
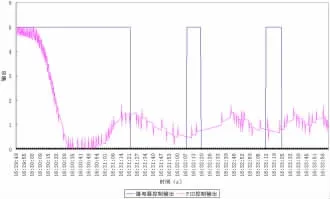
圖6 固態繼電器控制和PID控制輸出
4 結語
總體來看,PID控制方案要優于固態繼電器控制方案。在今后的研究中PID控制的功率輸出可以通過Labview中的計算算法來進行處理,在不影響控制效果的情況下獲得一條更穩定的輸出曲線,從而使功率輸出更接近于某個平均值,相比通斷控制更能直觀地看出功率輸出的大小。另外,本文中PID控制中的最佳比例控制Kp、積分控制Ti及微分控制Td系數是在常溫狀態下經過多次試驗,得到最佳的控制效果之后挑選出來的,在今后的研究中可以利用Labview軟件編程來實現Kp、Ti、Td的自動選擇,這樣計算機可以在不同的環境條件下自動挑選出最佳的控制系數來進行溫度控制,省去了很多人工挑選時間,而且比人工選擇更全面更準確。
暖體假人的發展比較迅速,并且非常具有實際意義,真實人體不可能完成的各項測試能由假人來代替完成。尤其是在近幾年,國內的研究在某些領域已達到國際先進水平。今后暖體假人的研究側重于:計算服裝的局部熱阻;模擬人體非均勻出汗的暖體假人以及如何更真實地模擬人體動態各部位不同的溫度以及出汗情況等[8]。因此在完善控制系統后,就可以整體制作假人并進行服裝熱阻的簡單測試了,本文后期研究中已經制作了一個簡體假人,為今后進行服裝熱阻測試奠定了基礎,其測試的精度要達到國家標準則需進一步的研究探索。
[1]諶玉紅,姜志華,曾長松.暖體假人測試技術研究現狀與發展趨勢[J].北京紡織報,2000,21(3):49-51
[2]楊凱,焦明立.暖體假人軟質模擬皮膚的研究及其應用[J].紡織學報,2008,29(12):74-77
[3]Maria Konarska,Krzysztof So?tynski.Comparative evaluation of clothing thermal insulation measured on a thermal manikin and on volunteers[J].Fibres&Textiles in Eastern Europe,2007,15 (2):73-76[4]Ingvar Holmér.Thermal manikin history and application[J]. European Journal of Applied Physiology,2004,92(6):614-618
[5]袁雪,陳斌魯.基于LabVIEW的Modbus串口通訊協議的實現[J].現代儀器,2008,(2):31-33
[6]彭建,劉躍.固態繼電器及在應用中一些問題的探討[J].貴州工業大學學報(自然科學版),2000,(6):64-71
[7]周衛兵.固態繼電器的特點及應用[J].山西電子技術,2010,(1): 90-92
[8]陳瀏.暖體出汗假人的開發現狀及其研究方向[J].紡織科技進展,2009,(2):87-89
Re s e a rc h on the The rm a l Ma nikin’s Te m pe ra ture Control Sys te m
ZOU Yue,LI Shu-zheng,LIU Yun
College of Environmental and Engineering,Donghua University
Thermal manikin is equipment simulating the heat and moisture exchange between the human body and the environment,which is important application of costume efficacy study.In order to find out the best program of the thermal manikin’s temperature control system,two program of the thermal manikin’s temperature control system are introduced,PID control and solid state relay make-and-break control,and Labview software and appropriate hardware devices are implemented on the thermal manikin surface temperature control,and the control effect of the two kinds of program are simply analyzed.It is found that PID control can be more effectively and automatically controlled temperature for thermal manikin.Finally,it also suggests improvement and optimization of PID control scheme to lay an important foundation for further research on this topic.
thermal manikin,temperature control,PID,solid state relay
1003-0344(2015)03-070-4
2013-12-9
鄒鉞(1969~),男,博士,副教授;上海市東華大學環境科學與工程學院(201620);E-mail:lishuzhengtongxue@163.com