刮板輸送機鏈傳動系統剛-柔混合動力學仿真研究
2015-07-18 12:05:43馬國清任桂周湯易
河北工業大學學報 2015年1期
馬國清,任桂周,湯易
(1.煙臺大學機電汽車工程學院,山東煙臺 264005;2.山東省高校先進制造與控制技術重點實驗室,山東煙臺 264005)
刮板輸送機鏈傳動系統剛-柔混合動力學仿真研究
馬國清1,2,任桂周1,2,湯易1,2
(1.煙臺大學機電汽車工程學院,山東煙臺 264005;2.山東省高校先進制造與控制技術重點實驗室,山東煙臺 264005)
刮板輸送機是現代化采煤工藝中不可缺少的主要設備.由于工作過程中承受非常大的動載荷及摩擦阻力,使得圓環鏈發生較大的變形,尤其在刮板輸送機過載時,這種情況更加明顯.把圓環鏈完全當做剛性體來處理,仿真結果可能達不到精度要求.本文利用ADAMS軟件建立了刮板輸送機鏈傳動系統剛-柔混合動力學模型并進行了動力學仿真分析,模擬了鏈傳動系統在過載卡死時圓環鏈、鏈輪及刮板所受到的各種力和力矩,仿真結果清晰地顯示了在大載荷作用下圓環鏈發生了長度變形,提高了仿真結果精度,從而為對其進行動態設計、強度校核及疲勞壽命預測提供理論依據.
刮板輸送機;鏈傳動系統;剛-柔混合;動力學仿真
刮板輸送機是現代煤礦綜采技術的核心設備,主要由機頭部機頭架、中部槽、傳動裝置和鏈傳動系統等組成.刮板輸送機具有機身空間小、可彎曲性好、傳動比準確、功率大、耐磨性好等諸多優點,但工作環境惡劣,動負荷波動劇烈,摩擦阻力大,在工作過程中易發生損壞.為了提高刮板輸送機的可靠性和壽命,在對其進行設計時常常將各零部件的安全系數選用較大值,電機功率值選取也很大,使得資源在不得已的情況造成浪費.對刮板輸送機進行動力學仿真分析,可以模擬刮板輸送機工作過程中各零部件的受力,從而為對其進行強度校核、疲勞預測及優化設計提供依據[1-4].
文獻[5]建立了刮板輸送機鏈傳動系統剛體動力學模型,并進行了仿真計算,這種剛性體構件在受到力的作用時不會產生變形,即構件上兩點之間的距離在受到載荷時并不發生改變.在現實中,在精度要求不是很高的時,大多數情況下把模型中的構件當作剛性系統來處理,這樣既可以得到所需精度的結果,也可以大大減少動力學計算時的計算量.但是在對仿真結果精度要求較高的特殊情況下,如果將模型中所有構件全部作為剛性體來處理,忽略了構件受力下的微小變形,最終就可能達不到所需精度要求,造成仿真結果失真.所以此時有必要將整個模型或模型中的的部分構件做成柔性體,這些柔性體在受力狀態下會產生彈性變形,更加符合實際工作狀態,最終仿真計算出來的結果會更加準確;另外如果對高精密的儀器進行動力學仿真,因各部件微小變形會對仿真結果產生較大影響,仿真時必須將各構件微小變形納入考慮范圍,故也需要將其全部或部分構件作為柔性體來處理;另外,如果需要研究構件受力后構件內部內應力及內應變,這時也必須將該構件作為柔性體來處理.
在ADAMS中,有一個AutoFlex模塊,利用該模塊可對剛柔體混合機械系統進行建模與仿真計算.
1 利用ADAMS/AutoFlex模塊建立柔性體
AutoFlex模塊是ADAMS軟件中專門用于柔性體建模的一個模塊,通過該模塊,可以很方便地建立柔性體的模態中性文件--MNF文件,然后再用該MNF文件替代原來的剛性體.對于外形相對比較復雜的柔性體,直接利用ADAMS/AutoFlex來創建模態中性文件會稍顯復雜,一般可以先在專用的有限元軟件中生成該構件的模態中性文件,然后再將其導入到ADAMS中.
利用AutoFlex模塊創建柔性體,有3種方法可以實現.第1種方法是拉伸法(Extrusion);第2種方法是利用剛體構件的幾何外形(Geometry)來創建柔性體,將構件離散為眾多的Solid Tetra四面體單元;第3種方法是導入有限元模型的網格文件創建柔性體[6].
用構件的幾何外形來創建柔性體,可以直接在ADAMS軟件中進行,它的本質是將幾何體的外形所占用的空間進行有限元離散化.利用該方法進行柔性化處理的幾何外形可以是直接在ADAMS/View中創建的構件,也可以是通過其它三維CAD軟件導入到ADAMS的Parasolid格式構件.
下面以刮板輸送機鏈傳動系統中一個圓環鏈為例,說明利用ADAMS/AutoFlex模塊將原先的剛性體創建成為柔性體的操作步驟.該例是利用第2種方法即通過剛性構件的幾何外形來創建柔性體.
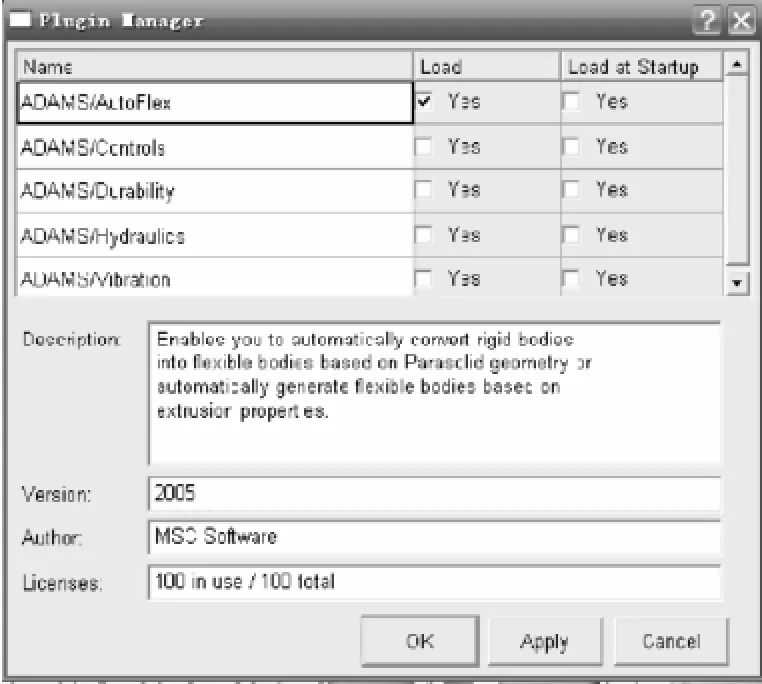
圖1 加載ADAMS/AutoFlex模塊Fig.1 The command of loading ADAMS/Auto-
1.1 加載ADAMS/AutoFlex模塊
首先加載ADAMS/AutoFlex模塊,單擊【Tools】菜單欄,然后在下拉菜單中選擇【Plugin Manager】,在彈出的Plugin Manager窗口中ADAMS/AutoFlex一行中勾選Yes,然后點擊確定按鈕退出Plugin Manager窗口,這樣就成功加載了ADAMS/AutoFlex模塊,如圖1所示.
1.2 創建外連點和輔助點
首選在圓環鏈part43一端的旋轉鉸處創建一個Marker點,Marker點的屬性設置為Add to Ground和GlobalXY,將該Marker點改名為attachmarker-1,再在該處創建一個Marker點,將該Marker點向外移動0.02 m,并改名為temmarker-1.用同樣的方法在圓環鏈part43的另一端創建兩個Marker點,分別命名為attachmarker-2和temmarker-2.
1.3 計算mnf文件
1)在ADAMS/View命令欄點擊【Build】,選擇【Flexible Bodies】,在下拉菜單中點擊【ADAMS/AutoFlex】,然后在彈出的對話框中,在FlexBody欄中輸入將要創建的柔性體的名稱part43-flex,在FlexBody Type中選擇用構件幾何外形來創建柔性體的Geometry項,在Part to bemeshed輸入框中提交擬柔性化的剛性體構件名稱part43.在M esh/Properties欄中,將擬采用的單元類型設置為四面體實體網格,Element Specification選擇Size,然后設置單元大小,在相應欄目輸入框中輸入0.03,M inimum Size欄目中設置為0.002,節點數目欄目輸入框中輸入30,勾選Stress Analysis,在材料輸入框中設置為Steel,其它欄目使用系統默認設置.
2)單擊attachments項,進入外連點的定義階段.在Selection Type下拉列表中選擇Cylindrical,在Radius輸入框中輸入0.0 15,在End Location輸入框中單擊鼠標右鍵,在彈出的菜單中選擇【Reference-frame】,點擊【Browse】欄,彈出Database Navigator對話框,在模型樹中找到Marker點temmarker-1,并將該Marker點置入End Location輸入框中,然后對Symm tric一項進行勾選,并單擊Transfer IDs按鈕,在彈出的對話框中會顯示生成的節點信息.同樣的方法,對圓環鏈另一端的外連點進行定義.單擊OK按鈕后,就開始計算該圓環鏈的mnf文件,計算結束后在ADAMS工作目錄下就會生成part43-flex.mnf.
1.4 用柔性體構件替換剛性體構件.
單擊菜單【Build】,在下拉菜單中點擊【Flexible Bodies】,在出現的二級菜單中點擊【Rigid to Flex】,此時會彈出一個對話框,需要在CurrentPart輸入框提交擬柔化的剛性體構件名稱part43,在MNF File輸入框中提交part43的MNF文件part43-flex.mnf及其路徑,單擊OK按鈕就可以用柔性體代替原來的剛性體,如圖2所示,圖中藍色的圓環鏈即為柔性體part43-flex,圖3所示為該柔性體的網格圖.
2 刮板輸送機鏈傳動系統動力學模型中柔性體的模態信息
模態是機械結構本身固有的一種振動特性,它只與構件的材料特性、構件的約束形式、構件的形狀有關,而與載荷等其他條件無關.通過求解振動特征方程,可以得到特征值與特征向量,即可得到相應的固有頻率與模態.模態分析就是結構的固有振動特性分析,這種分析用于確定結構的固有頻率和振型,并在此基礎上預言機械結構在受到各種激振力的作用下所表現出的實際振動響應,模態分析的結果可作為瞬態動力學分析,諧響應分析和譜分析等其他動力分析的基礎,因此,模態分析是結構動態設計及設備故障診斷的重要方法[7-12].
模態振型是一種虛擬的振動形式,也是機械系統的一種固有的特性,描述了與機械系統每一個固有頻率相對應的自身振動的形態.每一階固有頻率都對應一種振型.通過振型的線性疊加可以得到實際的振動響應(變形).
零件模態分析為自由狀態時,前6階為剛體位移狀態,即6個自由度狀態.第7階開始才是零件約束狀態時的第1階頻率,對應振型為第1階振型.
圖4~圖9即為圓環鏈自由狀態時的前6階模態,是其在6個自由度上產生的振動模態.
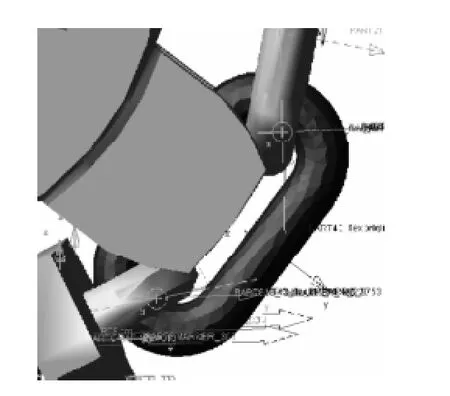
圖2 用柔性體替換剛性體后的圓環鏈圖Fig.2 The flexible body of round-link chain
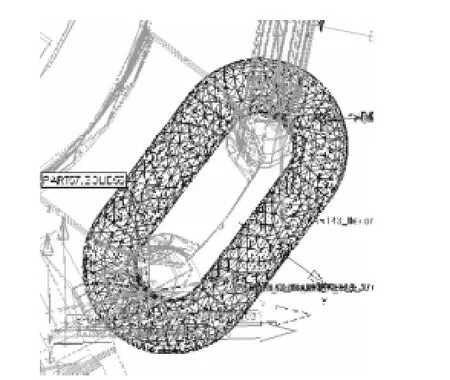
圖3 柔性體圓環鏈網格圖Fig.3 Themeshmap of flexible round-link chain
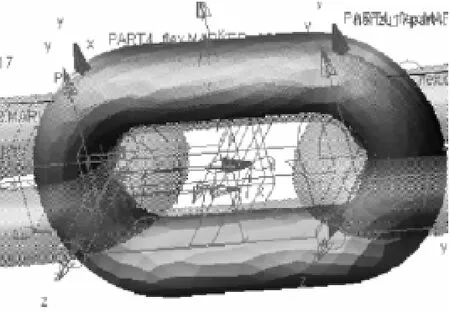
圖4 自由狀態第1階模態圖Fig.4 Sketch of first-ordermodel in free state(繞X軸旋轉)
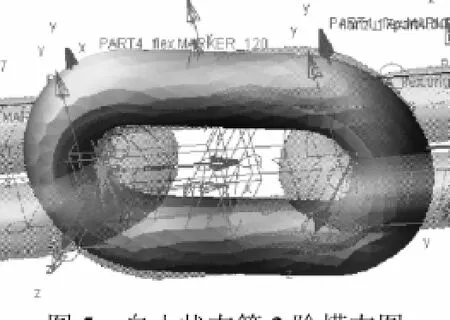
圖5 自由狀態第2階模態圖Fig.5 Sketch of second-ordermodel in free state(繞Z軸旋轉)
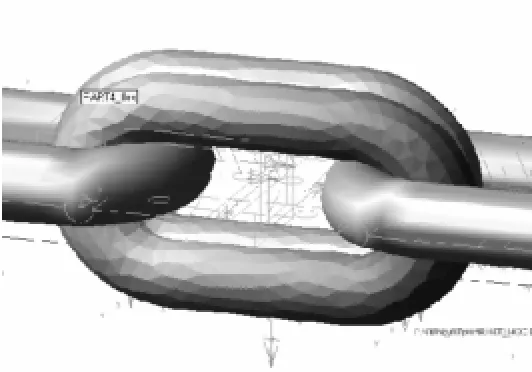
圖6 自由狀態第3階模態圖Fig.6 Sketch of third-ordermodel in freestate(沿Z軸的平移)
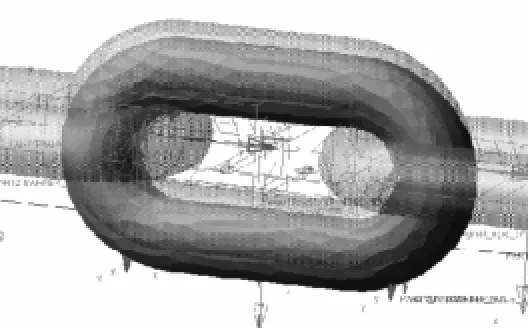
圖7 自由狀態第4階模態圖Fig.7 Sketch of fourth-ordermodel in free state(沿Y軸的平移)
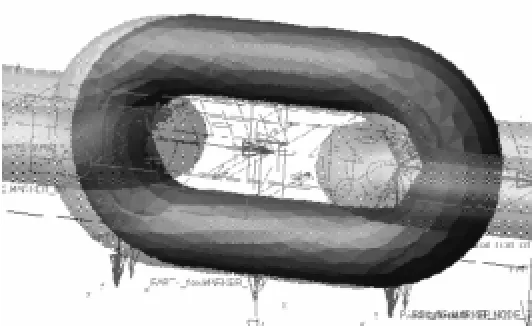
圖8 自由狀態第5階模態圖Fig.8 Sketch of fifth-ordermodel in free state(沿X軸的平移)
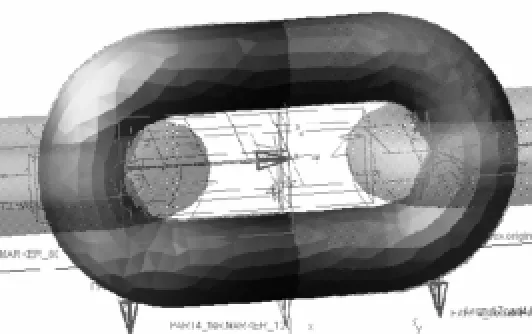
圖9 自由狀態第6階模態圖Fig.9 Sketch of sixth-ordermodel in freestate(繞Y軸的旋轉)
圓環鏈第7階模態才是其在約束狀態下的第1階模態,對應的頻率為第1階頻率.
圓環鏈約束狀態下第1階模態的振動頻率為f=4 522.71 Hz,第2階模態的振動頻率為f=4 775.72,第3階模態的振動頻率為f=5 287.25,第4階模態的振動頻率為f=5 492.58,如圖10~圖13所示.
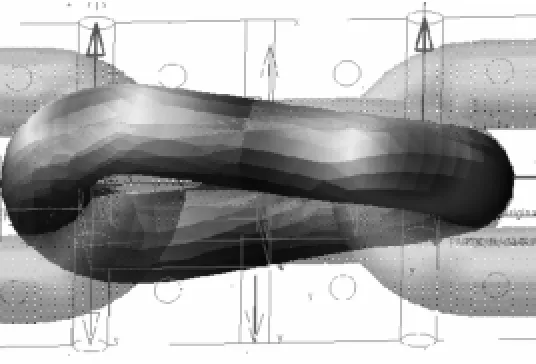
圖10 約束狀態第1階模態圖Fig.10 Sketch of first-orderm odel in constraintstate
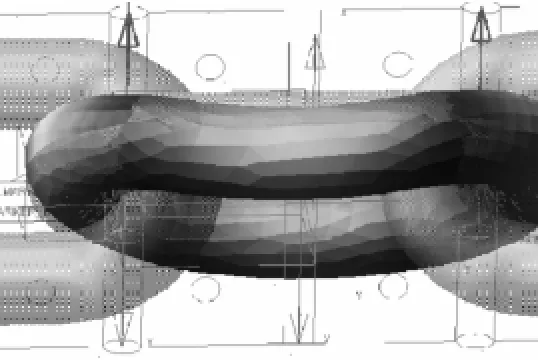
圖11 約束狀態第2階模態圖Fig.11 Sketch of second-ordermodel in constraintstate
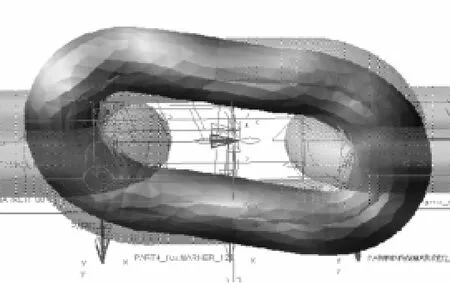
圖12 約束狀態第3階模態圖Fig.12 Sketch of third-ordermodel in constraint state
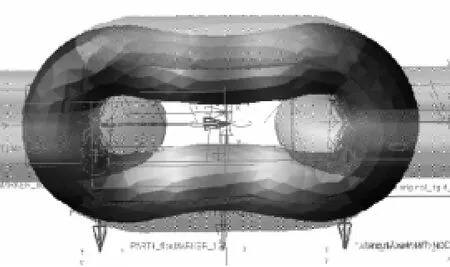
圖13 約束狀態第4階模態圖Fig.13 Sketch of fourth-ordermodel in constraintstate
3 刮板輸送機鏈傳動系統剛-柔混合動力學模型仿真
建立了刮板輸送機鏈傳動系統剛-柔混合動力學模型后,即可在ADAMS中對其進行動力學仿真,仿真結果可以得到模型中各體的位移、速度、加速度及受力曲線.
圖14~圖18即為刮板輸送機鏈傳動系統剛-柔混合動力學仿真過程圖及所得到的各曲線圖.

圖14 刮板輸送機鏈傳動系統剛-柔混合動力學模型圖Fig.14 Themodelof of scraper conveyor chain transmission system
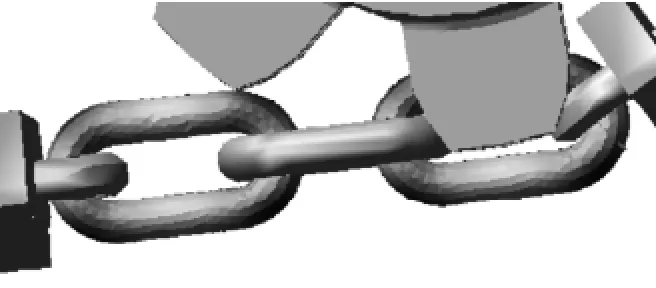
圖15 柔性體仿真圖Fig.15 The flexible round-link chain
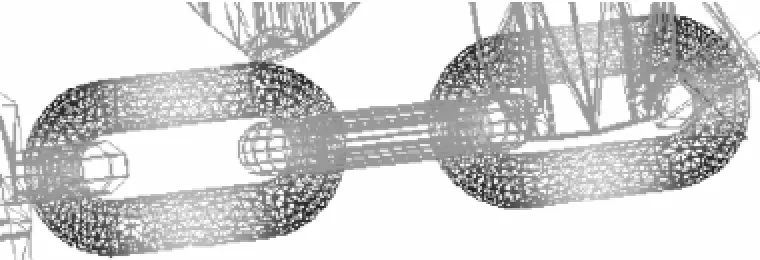
圖16 柔性體網格圖Fig.16 Themeshmap of flexible round-link chain
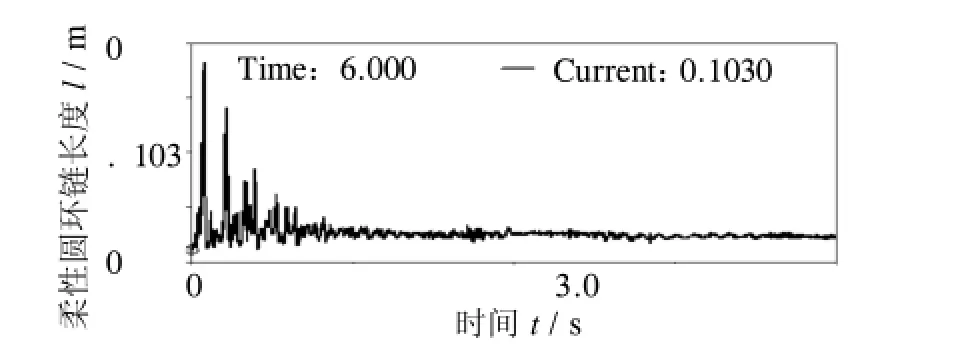
圖17 柔性圓環鏈長度變形曲線圖Fig.17 Thesketchof length deformationof flexible round-link chain
刮板輸送機在井下工作時的工況是非常復雜的,大面積煤壁的塌落有可能將鏈傳動系統卡死,造成悶車.在本文的動力學仿真模型中,設置了兩個制動柱,當選定的刮板與制動柱碰撞時,鏈傳動系統將被卡死,用以模擬煤壁塌落造成的悶車.圖19即為鏈傳動系統被卡死時柔性圓環鏈承受的載荷,圖20為鏈輪驅動力曲線圖,圖21為柔性圓環鏈長度變形曲線圖.

圖18 剛-柔混合動力學仿真鏈輪驅動力曲線圖Fig.18 The driving torque of chain wheel in rigid-flexible hybrid dynamics simulation
4 結論
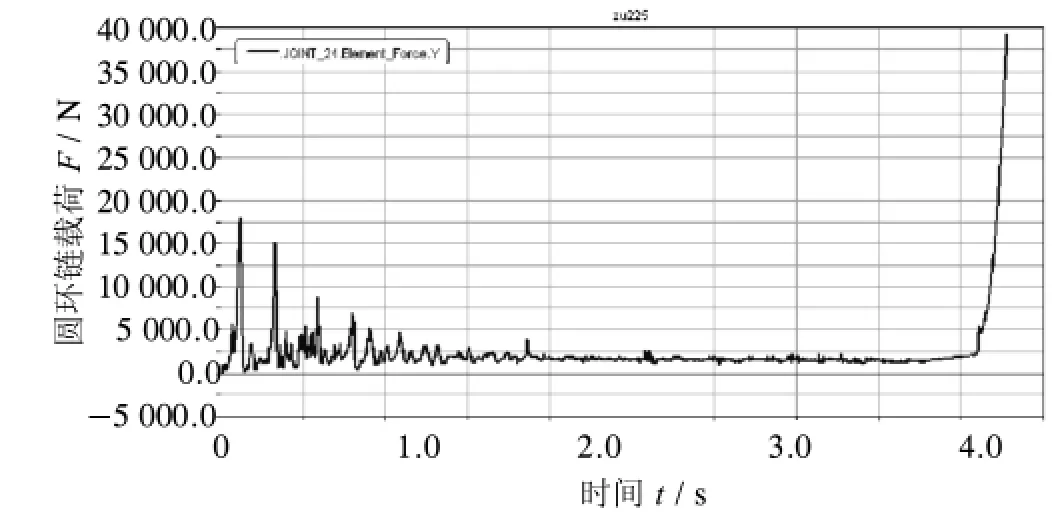
圖19 鏈傳動系統被卡死時柔性圓環鏈承受的載荷曲線圖Fig.19 The load of flexible round-link chain in case of overload
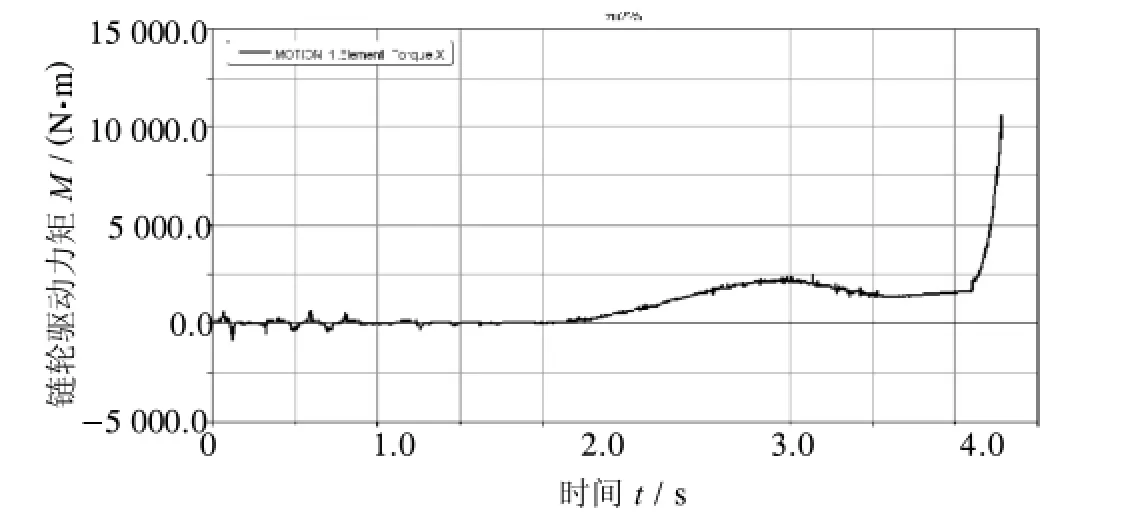
圖20 鏈傳動系統被卡死時鏈輪驅動力曲線圖Fig.20 The driving torque of chain wheel in case of overload
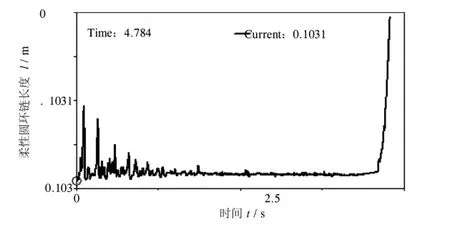
圖21 鏈傳動系統被卡死時柔性圓環鏈長度變形曲線圖Fig.21 The sketch of length deformation of flexible round-link chain in case of over-
在大載荷工作狀態下,刮板輸送機鏈傳動系統各零部件會發生顯著變形,如果完全將其做為剛性系統來處理,忽略各構件在大載荷作用下產生的彈性變形,則仿真結果可能會失真,因此,必須把刮板輸送機鏈傳動系統模型中的全部或部分構件做成柔性體來處理,這樣計算出來的結果會更準確一些.本文利用ADAMS軟件建立了刮板輸送機鏈傳動系統剛-柔混合動力學模型并進行了動力學仿真分析,剛-柔混合動力學模型更符合刮板輸送機實際工作狀態,仿真結果清晰地顯示了在大載荷作用下圓環鏈發生了長度變形,提高了仿真結果精度,從而為對其進行動態設計、強度校核及疲勞壽命預測提供理論依據.
[1]邵國友.礦用刮板輸送機主要部件的結構設計[J].煤礦機械,2014,35(4):14-16.
[2]許聯航,劉混舉.大采高工作面刮板輸送機中部槽斷裂原因分析[J].煤炭科學技術,2014,42(4):126-128.
[3]劉靈偉.刮板輸送機斷鏈的原因及對策[J].黑龍江科學,2014,5(4):111-112.
[4]雷麗萍.刮板輸送機鏈條鏈輪磨損失效分析[J].煤礦機械,2014,35(1):77-78.
[5]郭忠,龔曉燕,陳賀.刮板輸送機鏈輪傳動系統動力學仿真分析[J].煤礦機械,2010,31(9):68-70.
[6]陳峰華.ADAMS 2012虛擬樣機技術從入門到精通[M].北京:清華大學出版,2013.
[7]潘學萍,扈衛衛,尚霏.多信號模態參數識別的小波方法[J].電力自動化設備,2013,33(5):31-35.
[8]陳龑,林建平,胡小舟.基于模態分析的某客車車身NVH性能優化[J].現代制造工程,2013(6):51-54.
[9]尹長城,馬迅,陳哲.基于ANSYSWorkbench傳動軸的模態分析[J].湖北汽車工業學院學報,2013,27(1):15-18.
[10]花勇,李尚平,李冰.低速載貨汽車車架的模態實驗與驗證[J].農業裝備與車輛工程,2013,51(1):5-8.
[11]張計磊.基于虛擬樣機技術的鍛造操作機動力學仿真研究[D].沈陽:東北大學,2008.
[12]侯苗苗.基于ADAMS的天車系統建模仿真與分析[D].沈陽:東北大學,2009.
[責任編輯 楊屹]
Study on the rigid-flexible hybrid dynam ics simulation of scraper conveyor chain transm ission system
MA Guo-qing1,2,REN Gui-zhou1,2,TANG Yi1,2
(1.Schoolof Electromechanicals&Automobile Engineering,YantaiUniversity,Shandong Yantai264005,China;2.Key Laboratory of Advanced Manufacturing and Control Technology in Universitiesof Shandong,Shandong Yantai264005,China)
Scraperconveyorhasbecomeoneof themain equipmentindispensable in the processofmodernizationof coal m ining.Because of large dynam ic load and friction resistance in working process,the round-link chainsw ould undergo large deformations,especially in the case of overloading.Treating the round-link chains as rigid body,the simulation resultsmay not reach the precision requirement.The rigid-flexible hybridmodelof scraper conveyor chain transm ission system w asbuiltin thispaper,and thedynam icssimulation analysiswasalso done.Using thesimulationmodel,the forces and torquesof round-link chain,chain wheeland scraper blade can be calculated in the case of overload.Thesimulation results clearly show that the deformation of round-link chain occured.The precision simulation has provided theoretical basis for dynamic design,intensity and fatigue lifepredictionon thescraper conveyor chain transmission system.
scraper conveyor;chain transmission system;rigid-flexiblehybrid;dynamics simulation
TH227
A
1007-2373(2015)01-0073-05
10.14081/j.cnki.hgdxb.2015.01.014
2014-10-23
汽車安全與節能國家重點實驗室開放基金(KF11222);山東省科技發展計劃(2012YD04039)
馬國清(1970-),男(漢族),博士,副教授.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00