船載雷達天線與航姿分系統安裝精度研究
2015-07-18 11:24:48趙伊寧杜以林
新技術新工藝 2015年10期
關鍵詞:船舶
汪 洋,趙伊寧,杜以林
(1.中國人民解放軍 92941部隊,遼寧 葫蘆島 125001;2.中國人民解放軍裝備學院 研究生管理大隊,北京 101416;3.北京機電工程研究所,北京 100074)
船載雷達天線與航姿分系統安裝精度研究
汪 洋1,趙伊寧2,杜以林3
(1.中國人民解放軍 92941部隊,遼寧 葫蘆島 125001;2.中國人民解放軍裝備學院 研究生管理大隊,北京 101416;3.北京機電工程研究所,北京 100074)
建立了船載雷達天線安裝系統誤差與目標成功捕獲概率間的關系表達式,給出了雷達天線應滿足的安裝精度要求。利用船載地理系和甲板系間的坐標變換關系以及2種坐標系下的方位角、俯仰角計算公式,通過蒙特卡洛仿真得到了船載分系統的安裝精度要求。為船載天線和航姿分系統的安裝與標校提供了理論依據。
船載雷達天線;航姿分系統;安裝精度;蒙特卡洛仿真
Beijing 101416,China;3.Beijing Research Institute of Mechanical and Electrical Engineering, Beijing 100074,China)
船載雷達天線作為船載雷達系統的關鍵部件,在探測、通信和制導等方面發揮著重要作用。實際安裝過程中,船載雷達天線座往往不能保證和水平基準面完全水平,并且存在和船艏軸線不一致的現象,這將對探測目標的指向精度產生直接影響。船舶在航行時會發生橫搖、縱搖及航向的改變,一般采取兩軸穩定系統或者無機械穩定平臺的三軸穩定系統來有效隔離船體的搖擺。穩定系統利用航姿分系統提供的縱搖角、橫搖角和航向角信息,通過坐標變換技術在雷達天線方位和俯仰軸上進行實時的角度補償,因此,航姿分系統的安裝誤差會對雷達波束的穩定指向造成影響。
文獻[1]分析了船載雷達天線非理想安裝對系統測向誤差產生的影響,并且給出了一種誤差補償方法,但是缺乏對天線安裝精度的定量分析。文獻[2]、文獻[3]介紹了船載雷達系統常用的坐標變換公式以及相應坐標系下方位角和俯仰角的計算方法,為雷達天線的指向計算奠定了理論基礎,然而并沒有深入分析航姿分系統的安裝精度要求。本文先從系統成功捕獲目標的角度出發,研究由天線非理想安裝引入的系統誤差對捕獲成功概率的影響,進而得到天線座安裝應滿足的精度要求;然后運用船舶地理坐標系和甲板坐標系之間的變換公式,通過軟件仿真分析航姿分系統應滿足的安裝精度要求。
1 船載雷達天線安裝精度分析
船載雷達天線的安裝精度直接影響系統的指向精度及捕獲概率。假定誤差是正態平穩隨機過程,且連續捕獲概率近似服從泊松分布,則連續捕獲成功概率為:
(1)

(2)


(3)
式中,Bn是伺服帶寬。
假定系統參數選取如下:σ=0.35°,Bn=2.0 Hz,R1=1.6°,T=0.6 s,由式1~式3計算得到,天線安裝系統誤差q1與系統捕獲成功概率P關系如圖1所示,可以看出當天線座方位安裝精度高于0.35°時,可保證捕獲成功概率>99%。
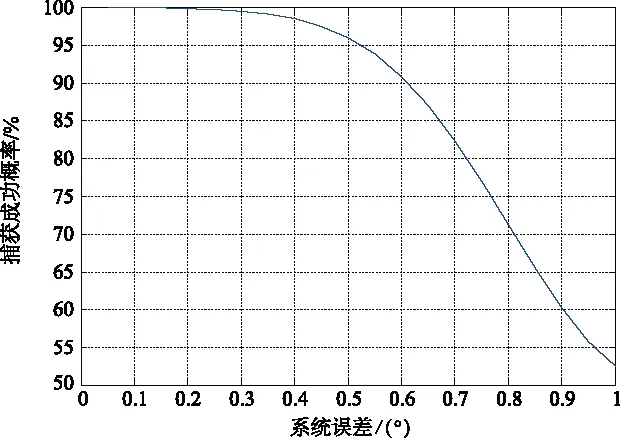
圖1 天線安裝系統誤差對系統捕獲成功概率的影響
2 船載航姿分系統安裝精度分析
船載航姿分系統的主要功能是提供進行船舶地理坐標系與甲板坐標系之間轉換所需要的航向、橫搖和縱搖角度信息。船舶地理坐標系和甲板坐標系的示意圖如圖2所示,圖2中船舶地理坐標系XdYdZd的原點O位于船體搖擺中心,OXd軸平行于水平面指向正東,OYd軸平行于水平面指向正北,OZd軸垂直于水平面指向天頂;船舶甲板坐標系XjYjZj是以甲板平面為基準,OYj軸平行于艏艉線指向船艏,OXj軸與OYj軸垂直指向右舷。
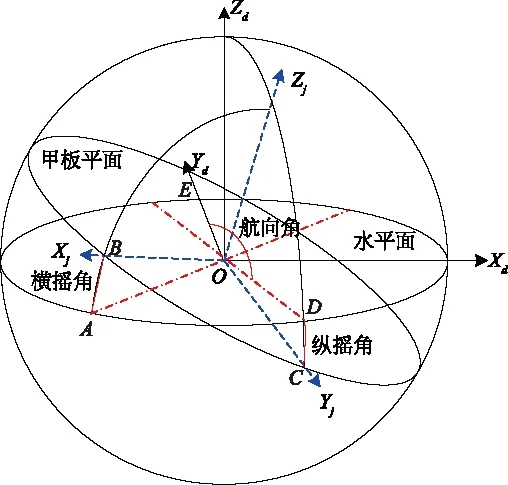
圖2 船舶地理坐標系和甲板坐標系示意圖

大地角轉換為甲板角的公式為:
(4)

甲板角轉換為大地角的公式為:
(5)
式中,y1=sinEjcosψcosθ,y2=-cosEjsinAjsinψcosθ,y3=cosEjcosAjsinθ,y4=(cosKcsinψ-sinKcsinθcosψ)sinEj,y5=sinKccosθcosEjcosAj,y6=(sinKcsinθsinψ+cosψcosKc)sinEj,y7=cosKccosθcosEjcosAj,y8=-(cosKcsinθcosψ+sinKcsinψ)sinEj,y9=(cosKcsinθsinψ+cosψcosKc) cosEjsinAj。
航姿分系統總精度應滿足坐標變換后的精度高于天線波束角的1/10,這樣才能保證系統的捕獲要求。為了給出航姿分系統航向角、橫搖角和縱搖角的具體精度要求,這里采用蒙特卡洛仿真方法[5],將航向角、橫搖角和縱搖角視作隨機變量,通過統計試驗和式4、式5的計算加以求解。坐標變換后的誤差大小用均方根值來衡量,其計算公式為:

(6)
仿真試驗中航向角、橫搖角和縱搖角均設置成均值為0的正態分布,方差與精度值相等,橫搖角和縱搖角精度保持一致。船舶地理坐標系到船舶甲板坐標系變換時不同橫搖、縱搖和航向精度對應的方位角和俯仰角均方根誤差結果如圖3所示,可以看出橫搖、縱搖精度對方位角均方根誤差影響甚微,特別是在航向精度較高的情況下,俯仰角均方根誤差隨著橫搖、縱搖和航向精度的降低而增加;當航向精度從0.15°變化到0.45°時,方位角均方根誤差顯著增加而俯仰角均方根誤差逐漸增大。從船舶甲板坐標系變換到船舶地理坐標系時不同橫搖、縱搖和航向精度對應的方位角和俯仰角均方根誤差結果如圖4所示,可以看出橫搖、縱搖精度對方位角和俯仰角均方根誤差影響很小,這種變化趨勢與式5一致;方位角和俯仰角均方根誤差隨著航向精度的降低而增大。

圖3 船舶地理坐標系到船舶甲板坐標系變換時不同橫搖、縱搖和航向精度對應的方位角和俯仰角均方根誤差

圖4 船舶甲板坐標系到船舶地理坐標系變換時不同橫搖、縱搖和航向精度對應的方位角和俯仰角均方根誤差
綜合圖3和圖4的仿真結果,可以得出如下結論:在航向精度≤0.30°,橫搖和縱搖精度≤0.05°的條件下,由坐標變換引入的方位角和俯仰角均方根誤差分別<0.29°和0.06°;因此,航姿分系統安裝后的總精度>0.30°,即可保證天線波束的指向精度。
3 結語
針對船載雷達系統的天線波束穩定指向,本文提出了雷達天線和航姿分系統應滿足的安裝精度要求。給出了天線安裝精度與目標成功捕獲概率間的表達式,分析了由天線非理想安裝產生的系統誤差對目標成功捕獲概率的影響。利用船載地理坐標系和船載甲板坐標系間的變換公式及相應坐標系下方位角和俯仰角的計算方法,通過蒙特卡洛仿真得到了橫搖、縱搖和航向角精度對方位角和俯仰角均方根誤差產生的影響,進一步給出了航姿分系統的安裝精度要求。本文關于安裝精度要求的研究,對于船載天線座和船載分系統設備的安裝與標校具有重要的指導意義。
[1] 杜永強.船載雷達天線安裝非理想引入的測向誤差分析[J].現代雷達,2000,22(4):61-66.
[2] 曹正才.船載雷達常用穩定方式坐標變換[J].雷達與對抗,2010,30(1):47-52.
[3] 張志遠,羅國富.船舶姿態坐標變換及穩定補償分析[J].船舶科學技術,2009,31(4):34-40.
[4] 王航宇,王士杰,李鵬.船載火控原理[M].北京:國防工業出版社,2006.
[5] 方再根.計算機模擬和蒙特卡洛方法[M].北京:北京工業學院出版社,1998.
責任編輯彭光宇
ResearchontheSettingPrecisionofShip-borneRadarAntennaandAttitudeandHeadingSubsystem
WANG Yang1,ZHAO Yining2,DU Yilin3
(1.92941 Unit of PLA, Huludao 125001,China;2.Department of Graduate Management, Academy of Equipment of PLA,
The formula describing the relation between setting system error of ship-borne radar antenna and successful acquisition probability of target is established, and the setting precision requirement of radar antenna is analyzed by the formula. Meanwhile, using the coordinate transformation between ship-borne geographic and deck coordinate systems and the calculation expressions of azimuth and elevation angle in the two coordinate systems, the setting precision requirement of ship-borne attitude and heading subsystem is obtained with the help of Monte Carlo simulation. Provide a theoretical basis for the install and calibration of ship-borne antenna and attitude and heading subsystem.
ship-borne radar antenna, attitude and heading subsystem, setting precision, Monte Carlo simulation
U 665
:A
汪洋(1969-),男,高級工程師,碩士,主要從事測量與控制及雷達等方面的科研及管理工作。
2014-12-09
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:08:26
艦船科學技術(2022年14期)2022-09-22 03:07:40
機械工業標準化與質量(2022年6期)2022-08-12 02:07:42
艦船科學技術(2022年2期)2022-03-29 01:12:44
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
軍工文化(2017年12期)2017-07-17 06:08:06
中國船檢(2017年3期)2017-05-18 11:33:09
船海工程(2015年4期)2016-01-05 15:53:30