基于EEMD 的聲發射管道泄漏定位檢測
2015-07-01 07:56:34周穎濤周紹騎姚遠航晁文勝
兵器裝備工程學報 2015年3期
周穎濤,周紹騎,姚遠航,晁文勝
(1.后勤工程學院軍事供油工程系,重慶401331;2. 68099 部隊,寶雞 721700)
管道在油氣輸送過程中,由于老化、斷裂、腐蝕、人為破壞等原因,泄漏時有發生,嚴重威脅人員和財產安全。現有的檢測方法如負壓波法、模型法、神經網絡法等[1],對于小孔泄漏、緩變泄漏、已發生的泄漏等情況,存在定位精度不高、甚至無法定位的缺點。聲發射法既適用于突然泄漏,也適用于已經發生的泄漏,安裝傳感器時無需在管道上打孔,因此對聲發射管道泄漏檢測定位研究具有重要意義。
在實際檢測中,傳感器接受到的信號包含大量噪聲,直接用原始信號進行計算就會造成較大誤差,現有的信號處理方法如小波包分解[2]、EMD[3]等先后被應用于管道泄漏聲發射定位,但都不能完全解決定位精度不高的問題。為提高定位精度,本文選取集合經驗模態分解(EEMD)作為數字信號處理方法,管道泄漏產生的聲發射信號具有強烈的非平穩特性[4],EEMD 適用于非平穩隨機信號的分析,通過對分解的信號進行提取和重構,可以更準確、有效地把握信號的特征信息。
1 聲發射定位原理
當管道發生泄漏時,在管內流體從漏孔向外噴射過程中,流體與泄漏孔處管壁的摩擦產生的能量以應力波的形式沿管壁傳播,利用聲發射傳感器采集該應力波信號,通過互相關法計算時差,即可確定泄漏位置。其定位原理如圖1 所示[5],由泄漏處產生的聲發射信號傳到兩端的傳感器產生一個時間差Δt,Δt=(L2-L1)/C,L1、L2為泄漏處與傳感器1、2的距離,C 為泄漏處產生的聲發射信號沿管壁傳輸的速度,其中

式(1)中D 為兩傳感器之間的距離,只要知道Δt,就可以確定漏孔位置,而對兩個傳感器接收到的信號進行互相關計算就可以得出Δt。其中互相關函數

式(2)中:Rx1x2(Δt)為兩信號的互相關函數;mx1、mx2為兩信號的平均值;σx1、σx1為兩信號的均方差。ρx1x2最大時對應的Δt 為所求的時間差,進而可以計算出泄漏的位置。泄漏信號沿管壁傳輸速度為[6]
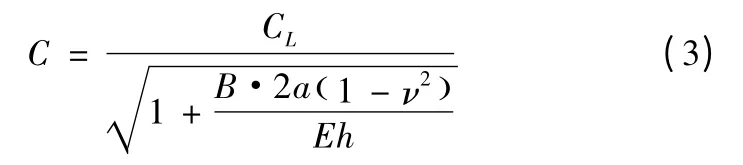
式(3)中:CL為縱向體速度;E 和ν 分別為彈性模量和泊松比;B 為體積模量;h 為管的厚度;a 為水管內經。

圖1 泄漏定位檢測原理
2 EEMD 信號分析方法
EEMD 算法為改進的EMD 算法,這是一種自適應分頻方法,不必像小波包分解那樣既要考慮小波基的選擇又要考慮分解尺度[2],可以較好地解決聲發射泄漏信號的多模態問題,具有良好的適應性和準確性,近年來被大量應用于語音信號處理和機械故障診斷等領域[7]。
2.1 經驗模態分解(EMD)算法
1998年,美籍華人Norden E. Huang 等[8]提出了本征模態函數(Intrinsic Mode Function,IMF)的概念,以及將任意信號分解為一組本征模態函數的新方法——經驗模態分解(Empirical Mode Decomposition,EMD)。EMD 本質上是一種將時域信號按頻率尺度分解的數值算法,可以根據被分析信號自身的特點,自適應地選擇頻帶,將原始信號分解為若干個IMF 分量和殘余分量,具有直觀、直接、后驗以及自適應性,適用于非平穩信號的分析。
2.2 集合經驗模態分解(EEMD)算法
EMD 過程中,當數據不是純的白噪聲時,分解中的一些時間尺度會丟失,這時就會造成分解的混亂,即模態混疊[9]。為了解決這個問題,Wu 和N.E.Huang 等[9]提出了集合經驗模態分解(Ensemble Empirical Mode Decomposition,EEMD)法,其具體過程為
1)在目標數據上面加入白噪聲序列;
2)將加入白噪聲的序列分解為IMF;
3)每次加入不同的白噪聲序列,反復重復步驟1)、2);
4)把分解得到的各個IMF 的均值作為最終的結果。
2.3 EEMD 算法應用于聲發射管道泄漏定位
由于管道泄漏聲發射信號中包含有大量的噪聲,如果用EMD 法對信號進行分解,就會遇到泄漏信號和頻段接近的干擾噪聲混疊在一起的現象,即模態混疊現象,通過互相關法進行漏點定位時,就會產生誤差。而EEMD 方法在信號分解過程中通過添加高斯白噪聲,使頻段相近的信號分離,可以得到更準確的分解結果,進而提高定位精度。具體步驟如下:
1)對1#、2#傳感器測得的信號x(1)、x(2)進行小波去噪[10]得到信號s(1)、s(2)。實際測得的信號包含大量噪聲,小波去噪使信號更加平滑,不僅可以減少噪聲的干擾,而且可以有效減少EEMD 的運算時間。
2)通過對信號s(1)、s(2)添加高斯白噪聲,進行EEMD分解,得到兩組IMF。此過程中要合理選擇高斯白噪聲的均方差,如果均方差偏大,會埋沒原始信號,分解出的IMF 會明顯帶有噪聲;如果均方差過小,在分解過程中會使添加的噪聲信號逐步分散在IMF 中,影響低頻部分的分解。本文選取待分解信號s(1)、s(2)均方差的0.1 倍分別作為所添加高斯白噪聲的均方差。
3)對分解的兩組IMF 分別進行選擇性重構。觀察分解的兩組IMF,根據管道泄漏聲發射信號非平穩、隨機性的特點,選取有效的IMF 分別進行信號重構,重構后的信號為h(1)、h(2)。
4)對重構后的信號進行互相關分析,求出時間差,確定泄漏位置。運用Matlab 的xcorr 函數對h(1)、h(2)進行互相關分析,求出h(1)、h(2)互相關序列最大值對應的序列延時矢量Bm。傳感器采樣頻率為Fs,波速為C,則信號h(1)、h(2)的時間差Δt=Bm* C/Fs,測量得到兩傳感器之間的距離為D,通過式(1)即可確定泄漏位置。
3 計算機仿真分析
為驗證EEMD 算法相比EMD 算法的優越性,本文選取如圖2 所示的一組典型信號序列,該信號由一路幅度逐漸增大的正弦信號和7 路頻率依次降低、幅度為1 的信號及趨勢量疊加而成。分別采用EMD 和EEMD 方法分別對上述疊加信號進行分解;EEMD 過程中,所加高斯白噪聲相對均方差為0.1,總體平均次數設為500,最大單次循環數設為5 000,分解結果如圖3 所示。
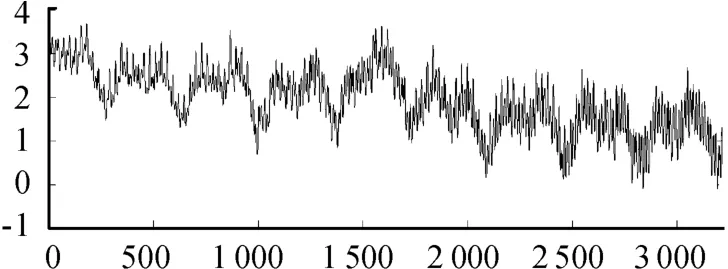
圖2 待分解仿真信號
從圖3 中可以看出,EMD 的結果中IMF 分量存在模態混疊現象,與實際信號相差很大。而EEMD 分解得到的IMF從高頻到低頻依次分布,所得到的信號更加平滑,更接近真實信號,較好地克服了模態混疊現象。
4 實驗分析
模擬管道鋪設了6 m×7 m 長的野戰輸油管線進行輸水實驗,管道外徑102 mm,壁厚2.5 mm,管材為10 號帶鋼,管內水壓為0.06 MPa。采用德國Vallen 公司生產的AMSY-5(M16 -2)型16 通道聲發射儀采集信號,采樣頻率設為2 MHz,采樣點數為10 000 點。1#傳感器和2#傳感器采集到的信號x(1)、x(2)如圖4 所示。
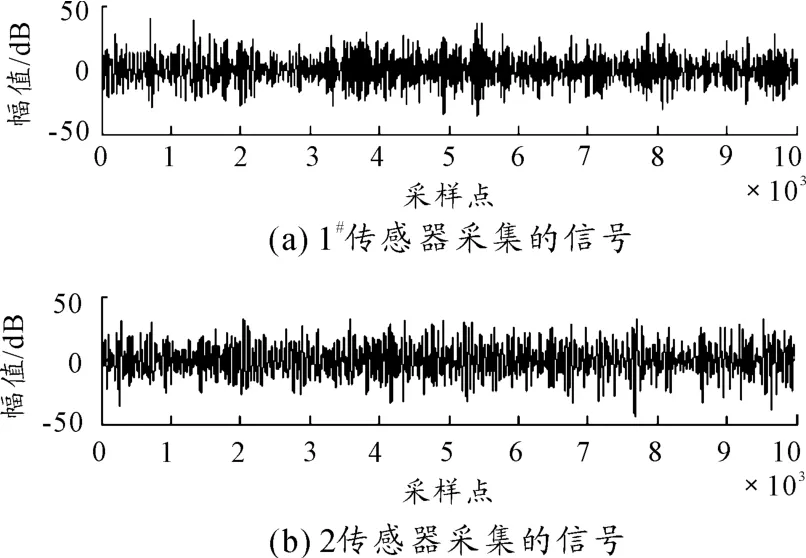
圖4 傳感器采集的信號
由于實驗現場環境含有大量的噪聲(如泄漏水流、振動噪聲、電子儀器帶來的噪聲等),對原始信號直接進行相關分析會產生較大的誤差。1#和2#傳感器接收到信號x(1)、x(2)經小波去噪,小波基選擇dmey 小波,分解尺度選擇3 層,去噪后的信號h(1)、h(2)如圖5 所示。

圖5 信號經小波去噪后的結果
通過加入相對均方差為0.1 的高斯白噪聲,將信號h(1)、h(2)經EEMD 分解,結果如圖6 所示。
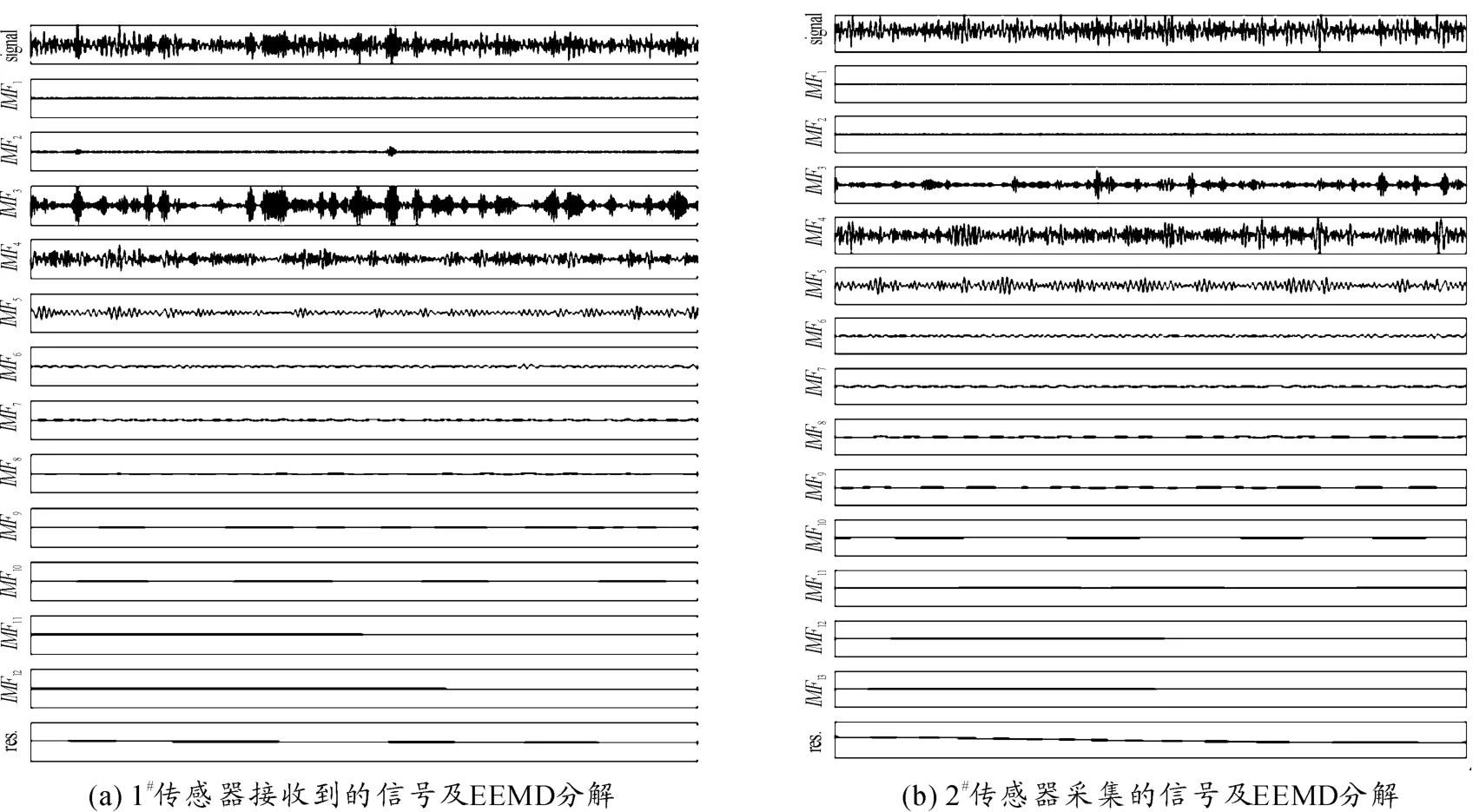
圖6 1#和2#傳感器采集的信號及EEMD 分解
分解得到的IMF 組代表了信號的內在特征,Wu 和Huang[11]用實驗的方法證明了分解過程具有二進濾波的作用。管道泄漏AE 信號具有典型的非平穩特性,根據這一特征,對分解后的IMF 進行分析可獲得信號中更豐富的波動信息。因此,可以利用分解得到的具有典型管道泄漏聲發射特征的IMF 分量對信號進行重構,恢復被干擾的真實信號,而對于剩余的IMF,如果干擾的成分較突出,可以直接將其去除。由于殘余分量是單調的,且代表了信號的整體趨勢,所以對AE 信號的分析作用不大,因此可不考慮殘余分量的影響。
從圖6 可以看出,EEMD 較好地將所測得的信號進行了分解,在分解得到的兩組IMF 中,IMF1、IMF2、IMF6 及其后面的分量幅值很小,對AE 信號的分析影響較弱,故不考慮。分量IMF3 ~IMF5 呈具有沖擊性質的AE 信號的典型特征,因此為有效的IMF 分量。選取IMF3 ~IMF5 三個本征模態函數進行重構,重構后的信號h(1)、h(2)如圖7 所示。
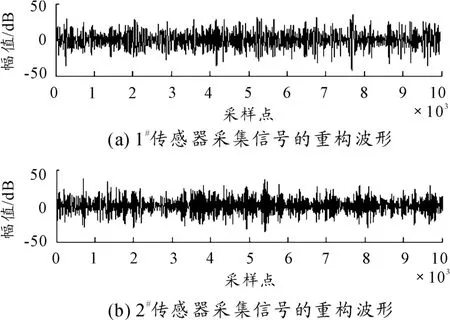
圖7 傳感器采集信號的重構波形
對重構后的信號進行相關分析,得到泄漏點與1#傳感器的距離為17.432 m,實際距離為18.00 m,誤差為3.16%。為進行比較,分別對原始信號、EMD 分解后的重構信號、EEMD 分解后的信號進行互相關分析,計算得到泄漏點距離1#傳感器的位置如表1 所示。

表1 根據不同方法計算的泄漏點位置
5 結束語
為提高管道泄漏聲發射檢測的定位精度,根據管道泄漏AE 信號非平穩、隨機性的特點,選取了EEMD 對信號進行分析:將兩個傳感器采集到的信號依次進行小波去噪和EEMD分解,對分解結果進行信號重構,通過互相關法進行時差計算和漏點定位。運用計算機仿真的方法,對一組典型的模擬信號分別進行EMD 和EEMD,仿真結果表明EEMD 比EMD具有更強的信號分解能力。通過實驗,將所測得的聲發射信號進行小波去噪,添加均方差適合的高斯白噪聲進行EEMD,得到了分解后的兩組IMF 分量。去除IMF 組中的干擾成分,篩選出具有現實物理意義的IMF 分量對兩路信號分別進行重構,進而確定時差和漏點位置。實驗表明:EEMD 比EMD 計算出的結果更為準確,漏點定位精度更高。
[1]陳華波,涂亞慶.輸油管道泄漏檢測方法綜述[J].管道技術與設備,2000(1):38-41.
[2]史烈,張光新,周澤魁,等.基于聲發射的輸油管線破壞點定位方法研究[J]. 浙江大學學報:工學版,2005,39(3):322-325.
[3]孫立瑛,李一博,靳世久,等.基于小波包和HHT 變換的聲發射信號分析方法[J].儀器儀表學報,2008,29(4):1577-1582.
[4]《國防科技工業無損檢測人員資格鑒定與認證培訓教材》編審委員會.聲發射檢測[M].北京:機械工業出版社,2004.
[5]LOU Y L,LIU G F,LI Z X.A general approach for optimal kinematic design of parallel manipulators[C]//New Orleans,LA:IEEE Proc Int Conf on Robot Automat.2004:3659-3664.
[6]PINNINGTON R J,BRISCOE A R.External applied sensor for axisymmetric waves in a fluid filled pipe[J].Journal of Sound and Vivration,1994,173(4):503-516.
[7]Huang N E,Shen S S.Hilbert-Huang transform and its applications[M].World scientific publishing co pte ltd,2014.
[8]Huang N E,Shen Z,Long S R,et al. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis[J].Proc.R.Soc.Lond,1998,454A:903-993.
[9]Wu Z,Huang N E. Ensemble empirical mode decomposition:a noise-assisted data analysis method[J].Advances in adaptive data analysis,2009,1(1):1-41.
[10]劉明才.小波分析及其應用[M]. 北京:清華大學出版社,2013.
[11]Wu Z,Huang N E.A study of the characteristics of white noise using the empirical mode decomposition method[J].Proc.R.Soc.Lond,2004,460A,1597-1611.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年18期)2018-11-14 01:48:24
電子制作(2018年11期)2018-08-04 03:25:42
山東工業技術(2016年15期)2016-12-01 05:31:22
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39