靶場試驗方案推演與評估系統(tǒng)設(shè)計
2015-07-01 07:56:22孫艷英
兵器裝備工程學(xué)報 2015年3期
關(guān)鍵詞:測量
孫艷英
(92941 部隊,遼寧葫蘆島 125001)
在海上靶場進行的導(dǎo)彈試驗,發(fā)射平臺和發(fā)射方向多是移動變化的,而測控裝備的測量站址是固定的,使測控裝備的性能受航區(qū)及海上各種環(huán)境條件的限制。靶場試驗航區(qū)周圍石油鉆井平臺的增多,制約靶場試驗航路的選取,為靶場試驗方案的制定增加了難度。靶場試驗方案是由試驗主管人員根據(jù)歷史經(jīng)驗設(shè)計試驗航路,選用參試裝備,目前還沒有科學(xué)合理的論證方法和方便可行的論證工具對設(shè)計出的試驗方案進行合理性分析和論證。另外,在靶場組織的導(dǎo)彈飛行試驗中,往往由于試驗危險區(qū)內(nèi)存在的個別漁船影響,導(dǎo)致試驗任務(wù)一再推遲甚至取消。針對上述原因,本文設(shè)計了靶場試驗方案推演與評估系統(tǒng),模擬導(dǎo)彈沿預(yù)定飛行試驗航路飛行,推演參試裝備對導(dǎo)彈跟蹤測量參數(shù)和跟蹤性能,估算導(dǎo)彈在飛行中對保護目標(biāo)的威脅程度,評估試驗方案的總體性能,既能動態(tài)演示試驗進程,對試驗方案進行科學(xué)合理的演示驗證,為試驗方案制定人員提供測試和驗證工具,還能提供準(zhǔn)確、可靠的威脅態(tài)勢信息,為試驗決策首長提供輔助決策信息支持,避免或減少一些試驗資源浪費,提高靶場的指揮自動化水平。
1 試驗方案推演與評估系統(tǒng)設(shè)計
1.1 系統(tǒng)結(jié)構(gòu)
靶場試驗方案推演與評估系統(tǒng)主要由試驗方案推演系統(tǒng)、試驗方案評估系統(tǒng)、數(shù)學(xué)模型庫、數(shù)據(jù)庫(包括測量原始數(shù)據(jù)、測量結(jié)果數(shù)據(jù)、理論彈道數(shù)據(jù)、測控裝備性能指標(biāo)、測控站點數(shù)據(jù)、航區(qū)周圍重點目標(biāo)數(shù)據(jù))、數(shù)據(jù)庫管理系統(tǒng)、信息顯示系統(tǒng)、人機交互界面組成。系統(tǒng)結(jié)構(gòu)如圖1 所示。
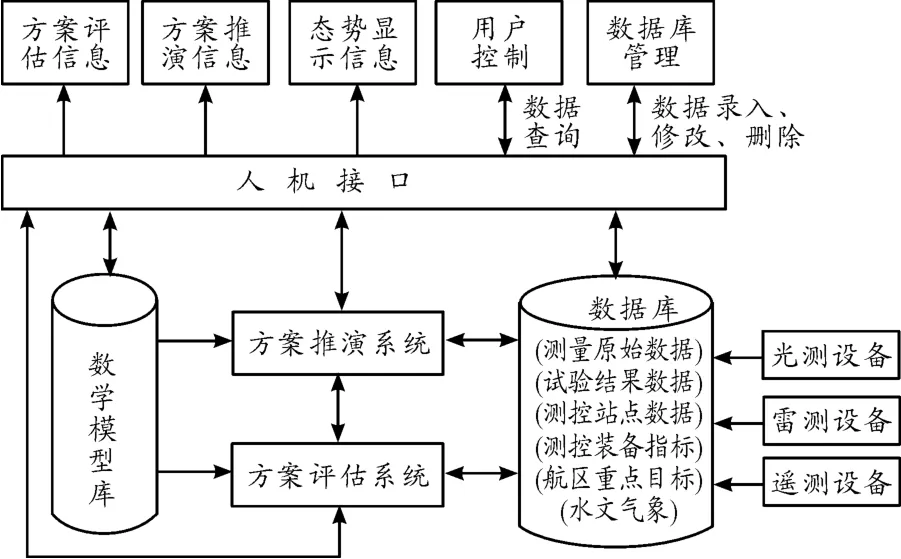
圖1 靶場試驗方案推演與評估系統(tǒng)結(jié)構(gòu)
1.2 試驗方案推演系統(tǒng)
試驗方案推演主要基于制定的試驗方案,依照理論彈道數(shù)據(jù),結(jié)合導(dǎo)彈運動特點、測控裝備技術(shù)指標(biāo)、航區(qū)及海上各種環(huán)境條件的限制,通過數(shù)學(xué)推演模型按時間軸生成導(dǎo)彈運動參數(shù)、參試測控裝備對導(dǎo)彈的跟蹤測量數(shù)據(jù)等試驗?zāi)M推演數(shù)據(jù),對試驗過程進行動態(tài)推演,驅(qū)動靶場指揮顯示系統(tǒng)動態(tài)展示推演過程中的試驗綜合態(tài)勢和試驗預(yù)期結(jié)果。若推演過程中輸入定制的推演事件[1],則解算推演事件對導(dǎo)彈飛行試驗的影響。推演事件是試驗過程中影響試驗進程的事件,如危險區(qū)或禁區(qū)漁船,航區(qū)附近石油平臺,復(fù)雜氣象條件等。假設(shè)推演事件1 為航區(qū)某位置的石油平臺,則在方案推演過程中實時解算目標(biāo)在飛行過程中對石油平臺的威脅概率,給出不斷變化的量化結(jié)果,并將威脅概率按值域范圍分成不同威脅等級,當(dāng)威脅概率大于規(guī)定范圍時給出威脅提示和威脅等級提示。
1.3 試驗方案評估系統(tǒng)
試驗方案是否滿足試驗要求,需要對該方案各主要指標(biāo)進行評估,即對測量精度、可靠性和試驗成功率等進行分析和評價。
試驗方案評估系統(tǒng)根據(jù)試驗方案推演系統(tǒng)產(chǎn)生的推演數(shù)據(jù),估算參試裝備在不同彈道段落的測量精度、測量覆蓋區(qū)域、各彈道段落的測量成功率、安控可靠性(安控時延)、對重要目標(biāo)的威脅概率等指標(biāo)。最后綜合試驗方案各項指標(biāo),應(yīng)用系統(tǒng)分析方法對試驗方案作出明確評價,評估試驗方案的合理性。
1.4 數(shù)學(xué)模型庫
數(shù)學(xué)模型庫包括數(shù)據(jù)分析、計算、推理所需的各種數(shù)學(xué)模型。主要包括設(shè)備誤差引入模型;測控數(shù)據(jù)仿真模型;對測量數(shù)據(jù)進行預(yù)處理的野值剔除、數(shù)據(jù)平滑、濾波、預(yù)測等算法模型;實時數(shù)據(jù)處理模型(彈道解算、落點評估、對重要目標(biāo)的威脅概率評估等);裝備歷次試驗數(shù)據(jù)質(zhì)量評估模型;測控裝備在跟蹤覆蓋區(qū)域的測量成功率、測量精度解算模型;目標(biāo)理論彈道對不同測系的坐標(biāo)變換模型;系統(tǒng)可靠性估算模型;試驗方案綜合評估模型等。
1.5 數(shù)據(jù)庫
靶場測控信息主要包括外測(光測、雷測、GPS/北斗)、遙測、警戒雷達(dá)等信息。
測控裝備原始測量數(shù)據(jù)錄入測量原始數(shù)據(jù)庫;經(jīng)野值剔除、平滑、濾波、定位等一系列處理后的彈道解算結(jié)果、設(shè)備質(zhì)量評估結(jié)果(包括跟蹤時間、跟蹤穩(wěn)定性、數(shù)據(jù)錄取有效率、測量精度)等數(shù)據(jù)錄入試驗結(jié)果數(shù)據(jù)庫;任務(wù)結(jié)束后的事后數(shù)據(jù)處理結(jié)果作為數(shù)據(jù)真值錄入試驗結(jié)果數(shù)據(jù)庫。
靶場所有測控裝備的戰(zhàn)術(shù)技術(shù)指標(biāo)參數(shù)(作用距離、測角范圍、跟蹤角速度、測量精度等)錄入測控裝備指標(biāo)數(shù)據(jù)庫;靶場所有測控站點的大地坐標(biāo)(L、B、H)和空間直角坐標(biāo)(X、Y、Z)錄入測控站點數(shù)據(jù)庫;航區(qū)周圍重點目標(biāo)的大地坐標(biāo)(L、B、H)、區(qū)域面積、重要等級等數(shù)據(jù)錄入航區(qū)周圍重點目標(biāo)數(shù)據(jù)庫;水文氣象數(shù)據(jù)錄入水文氣象數(shù)據(jù)庫。
數(shù)據(jù)庫管理系統(tǒng)用于完成對數(shù)據(jù)庫的錄入、修改、查詢和維護工作。
2 試驗方案推演過程
2.1 彈道仿真
彈道仿真可分為理論彈道仿真、極限彈道仿真和任意規(guī)劃彈道仿真。
理論彈道和極限彈道由工業(yè)部門提供,一般分為3 種:建立在空間直角坐標(biāo)下的坐標(biāo)(t,X,Y,Z);建立在大地坐標(biāo)下的坐標(biāo)(t,L,B,H);建立在發(fā)射坐標(biāo)系下的平面坐標(biāo)(t,X,Z)和海拔高程H,由下式[2]

計算發(fā)射坐標(biāo)系下的坐標(biāo) (t,X,Y,Z )。
任意規(guī)劃彈道是在二維電子地圖上任意輸入目標(biāo)運動航跡,根據(jù)目標(biāo)的起始點坐標(biāo)、時間、運動速度和運動方向生成目標(biāo)規(guī)劃彈道。
在實時數(shù)據(jù)處理中,需要根據(jù)外場裝備的數(shù)據(jù)幀頻將仿真彈道數(shù)據(jù)加密成同等幀頻數(shù)據(jù)。
2.2 裝備測量數(shù)據(jù)仿真
為了對目標(biāo)飛行試驗進行定量分析,需要對目標(biāo)在空間的位置、速度等參數(shù)進行測量,提供各測量站到飛行目標(biāo)的距離、方位角、高低角,及它們隨時間的變化率等。
對于給定的仿真彈道,需要進行發(fā)射坐標(biāo)系、地心坐標(biāo)系與測量坐標(biāo)系之間的轉(zhuǎn)換[2-3],最終將發(fā)射坐標(biāo)系或地心坐標(biāo)系下的目標(biāo)彈道數(shù)據(jù)轉(zhuǎn)換為各測站測量坐標(biāo)系下對目標(biāo)的觀測元素,如方位角、俯仰角、目標(biāo)距離等,這些觀測元素是測量站在理想條件下的觀測結(jié)果。
裝備的測量原理、測量體制、測量環(huán)境等因素影響,使靶場測控系統(tǒng)中測量裝備采集的目標(biāo)運動參數(shù)數(shù)據(jù)存在各種不同程度的誤差。對于設(shè)定的目標(biāo)運行軌跡,為準(zhǔn)確推演各測量站對目標(biāo)的觀測結(jié)果,需要在理想的觀測結(jié)果中加入合理的測量誤差。
2.3 測量誤差引入
隨著目標(biāo)的運動,測量站相對于被測目標(biāo)之間的相對位置關(guān)系即跟蹤幾何在不斷變化,其測量誤差也在不斷變化,而電磁環(huán)境、氣象等要素也會影響測量裝備的測量結(jié)果。因此,不同測量裝備的測量誤差不同,布站位置不同的同一種測量裝備的測量誤差不同,不同氣象條件參試的同一測量裝備的測量誤差也不相同。
考慮試驗中易出現(xiàn)的異常情況如異常測元、時間不同步等情況。按照誤差模型將各種誤差源的誤差仿真值加到理想狀態(tài)下的觀測結(jié)果上,形成合理的測量仿真結(jié)果。引入的誤差源包括空間傳播誤差、大地測量誤差、測量設(shè)備誤差、時統(tǒng)誤差等主要誤差項。
誤差仿真的策略是:向不同測量段落的各測元分別加入符號不同、大小不等的系統(tǒng)誤差;向各測元分別加入服從正態(tài)分布、均值為零的隨機誤差。引入的系統(tǒng)誤差和隨機誤差的方差的大小可根據(jù)各測量裝備的性能指標(biāo)和在不同參試條件下的歷史測量誤差統(tǒng)計分析獲得。
不同站址的測量裝備對目標(biāo)的捕獲時間、跟蹤時間不同,需考慮各測站的跟蹤覆蓋范圍和對目標(biāo)的通視性。
2.4 測量裝備通視性分析
由于測量裝備的自身性能(測角范圍、最大作用距離、跟蹤角速度、角加速度等)影響和時空條件(地球曲率、目標(biāo)的光照條件等)限制,測量裝備對目標(biāo)的觀測是有范圍的。
當(dāng)目標(biāo)飛行高度較低時,有些站位裝備因地形遮擋測量不到目標(biāo),需根據(jù)各測量站點周圍地形地貌,得到各自的受限范圍。
測量裝備能夠觀測到目標(biāo)的空間范圍稱可見域。由于目標(biāo)特性、環(huán)境條件和測控裝備自身性能的影響,裝備對其可見域目標(biāo)不一定能發(fā)現(xiàn)和跟蹤,裝備對目標(biāo)的跟蹤特性可由仿真和歷史測量結(jié)果統(tǒng)計分析獲得。
2.5 推演事件定制
試驗方案制定過程中或進入試驗程序后,總有一些含有一定風(fēng)險的不確定事件影響試驗方案的制定或試驗的實施,可在試驗方案推演系統(tǒng)中預(yù)先或?qū)崟r輸入定制的推演事件,推算和演示推演事件對導(dǎo)彈飛行試驗的影響。例如,在按任務(wù)需求規(guī)劃的某試驗航路中,有某石油平臺距試驗禁區(qū)較近,應(yīng)分析導(dǎo)彈飛行故障對該石油平臺可能造成的威脅,對試驗風(fēng)險進行評估。為此,可以在試驗方案推演系統(tǒng)中預(yù)先輸入該試驗平臺位置,定制對該石油平臺進行威脅評估的推演事件,在方案推演過程中實時推算并顯示導(dǎo)彈故障對該石油平臺的威脅概率。
推演事件由用戶和推演系統(tǒng)的人機交互界面輸入,對于固定事件元素如石油平臺位置存儲在數(shù)據(jù)庫中,輸入時從數(shù)據(jù)庫調(diào)入,突發(fā)性事件元素人工輸入。
2.6 推演態(tài)勢顯示
真實演示試驗飛行過程、參試裝備工作狀態(tài)及試驗預(yù)測結(jié)果,是對該試驗實施過程的預(yù)演,為方案制定人員和試驗決策人員提供科學(xué)、直觀的可視依據(jù)。顯示內(nèi)容包括試驗?zāi)繕?biāo)飛行軌跡,參試測控裝備對目標(biāo)的跟蹤狀態(tài)、跟蹤測量參數(shù),系統(tǒng)測量精度,導(dǎo)彈故障時預(yù)測落點對重要目標(biāo)的威脅概率等。
3 試驗方案評估方法
3.1 評估指標(biāo)確定
為確定設(shè)計出的試驗方案是否滿足試驗要求,試驗過程中出現(xiàn)的突發(fā)事件是否影響試驗安全、滿足試驗條件,需要對系統(tǒng)某些指標(biāo)進行量化、評估,包括對測量精度、測量覆蓋區(qū)域、測量成功率、安控可靠性、目標(biāo)威脅概率等指標(biāo)進行分析,建立量化分析模型,并對各指標(biāo)量化結(jié)果進行綜合評估,對試驗方案的合理性和可行性作出準(zhǔn)確評價。
3.2 測量覆蓋區(qū)域分析
已知各測量裝備的站址和戰(zhàn)術(shù)技術(shù)指標(biāo),根據(jù)理論彈道或規(guī)劃彈道,在考慮周圍地形、地球曲率、跟蹤角速度等因素的影響下,分析各參試測控裝備組成的測控系統(tǒng)對被測目標(biāo)可達(dá)到的跟蹤測量區(qū)域[4],分析被測目標(biāo)在試驗航區(qū)內(nèi)任意位置,系統(tǒng)可實現(xiàn)的跟蹤覆蓋區(qū)域,估算是否滿足測控要求。
影響測量裝備捕獲跟蹤的許多因素呈隨機特性,例如彈道與姿態(tài)的隨機變化、裝備的隨機誤差、環(huán)境條件的隨機變化等,需要通過多次仿真,用統(tǒng)計的方法確定測量覆蓋區(qū)域,并采用數(shù)據(jù)列表和圖形方式顯示。
3.3 測量成功率分析
參試的每臺裝備,并不是每次試驗都能保持較好的可靠性并提供有效的試驗數(shù)據(jù),在實際測量時因可靠性不夠?qū)е虏荒芴峁┯行У脑囼灁?shù)據(jù)的情況需要考慮在內(nèi)。
測量成功率分析是對參試的各測量裝備組成的測控系統(tǒng)進行可靠性估計,計算整個測控系統(tǒng)成功完成對目標(biāo)測控任務(wù)的概率。
本文對測控系統(tǒng)可靠性的評估分析,是以被評估參試裝備在近期內(nèi)參加試驗任務(wù)能夠提供有效測量信息的能力作為衡量其可靠性的重要指標(biāo)和依據(jù),并兼顧到測控裝備近期的維護保養(yǎng)情況及參加測控聯(lián)調(diào)、合練等任務(wù)的工作狀態(tài)。
設(shè)某裝備在近1年內(nèi)參加試驗任務(wù)N 次,有N1次提供了有效的試驗數(shù)據(jù),未能提供有效數(shù)據(jù)的情況包括裝備故障、操作手操作失誤和測量數(shù)據(jù)異常等。計算單臺裝備測量成功率r 的公式為

測控系統(tǒng)中的各裝備是相互獨立的,整個測控系統(tǒng)的測量成功率模型為并聯(lián)結(jié)構(gòu)。系統(tǒng)的測量成功率計算公式為

3.4 測量精度分析
在靶場進行的武器裝備的試驗?zāi)康氖菣z驗武器裝備的戰(zhàn)術(shù)技術(shù)性能,鑒定武器裝備性能是否滿足戰(zhàn)術(shù)技術(shù)指標(biāo)的標(biāo)準(zhǔn)測控系統(tǒng)的精度。
假設(shè)某測量裝備采用某種數(shù)據(jù)處理方法得到導(dǎo)彈的彈道坐標(biāo)為x1、x2、…、xn,理論彈道坐標(biāo)為x01、x02、…、x0n。則該裝備提供的測量精度估計值[5-6]為

同理可得到
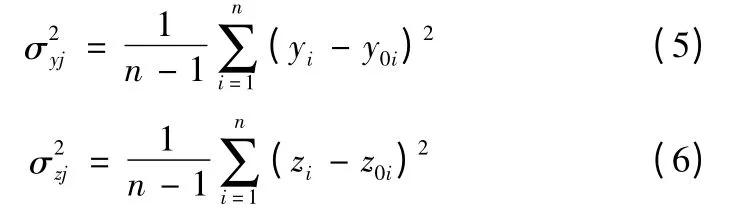
則系統(tǒng)測量精度統(tǒng)計結(jié)果為:
在不同測控段落,參試裝備不同,導(dǎo)彈參數(shù)精度不同,需要根據(jù)參試裝備實際測量和數(shù)據(jù)處理情況合理劃分統(tǒng)計區(qū)域,使彈道精度統(tǒng)計結(jié)果真實反映各測控段落實際情況,以正確檢驗試驗測控方案是否滿足試驗要求。
3.5 安控可靠性分析
安控由彈上自主自毀系統(tǒng)和地面安控系統(tǒng)組成,兩系統(tǒng)采用并聯(lián)方式。將各系統(tǒng)裝備按工作方式進行分類,建立各裝備的可靠性模型和框圖,按照設(shè)備基本可靠性指標(biāo)MTBF值和規(guī)定的任務(wù)時間,計算各裝備的任務(wù)可靠性[7]。靶場安控可靠性框圖如圖2 所示。
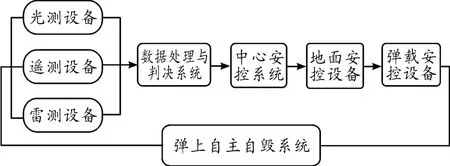
圖2 靶場安控可靠性框圖
3.6 目標(biāo)威脅概率評估
距試驗危險區(qū)較近的目標(biāo)或試驗禁區(qū)內(nèi)出現(xiàn)的移動船只,需計算導(dǎo)彈故障飛行時對目標(biāo)的威脅概率。靶場試驗的導(dǎo)彈故障模式[8]一般分為有控墜落和失控墜落2 類模式。每類模式又分為有偏墜落和無偏墜落2 種形式。由于導(dǎo)彈在其飛行彈道上任一點均可能發(fā)生故障,且彈道上不同點對于保護目標(biāo)的威脅不同,工程上一般采用彈道逐點積分原理進行計算。基本方法是:導(dǎo)彈故障或?qū)?dǎo)彈實施安控后自毀落點散布是以自毀點為中心,以導(dǎo)彈速度方向為中心,半徑為R 的長方形或扇形等區(qū)域,R 值大小與導(dǎo)彈故障時的導(dǎo)彈速度、彈道高度有關(guān),在中心方向上均勻選取間隔足夠小的點,計算每一點對保護目標(biāo)的威脅概率,然后相加。
3.7 試驗方案評估
由于試驗中涉及的環(huán)境因素、設(shè)備因素、人為因素的不完全確定性,有些試驗方案評定指標(biāo)比較抽象、模糊,如測量裝備工作的穩(wěn)定性、人工操作的隨機性等,基于這種描述問題的不準(zhǔn)確性即模糊性,可采用模糊綜合評價方法[9-10]對試驗方案進行綜合評估。
設(shè)U={u1,u2,…,un}為評價指標(biāo)因素集合,V={v1,v2,…,vm}為評價指標(biāo)的評語集合。設(shè)模糊集合B~={b1,b2,…,bm}是評語集合V 上的一個模糊子集,其中bj(j=1,2,…,m)∈[0,1]是第j 種評價vj對模糊集B~的隸屬度;模糊集合A~={a1,a2,…,an}為評價指標(biāo)因素權(quán)重集合,其中為從U 到V 的一個 (n×m )維模糊關(guān)系矩陣,其矩陣元素rij表示從第i 個指標(biāo)因素著眼,作出第j 種評價的可能程度。則評判結(jié)果

4 實例分析
將某試驗方案分成3 個測量段落,在每個測量段落分別對測量精度、測量覆蓋區(qū)域、測量成功率、安控可靠性、目標(biāo)威脅概率進行分析、統(tǒng)計,給出出不同指標(biāo)的模糊評價值。將評判集定義為﹛好,良好、一般、差﹜。如由首段參試設(shè)備的測量成功率分別為0.70、0.60、0.70、0.60、0.65,則由并聯(lián)成功率計算公式得出首段測量系統(tǒng)的測量成功率為0.995,其模糊評判集為{0.5,0.4,0.1,0}。同理得出各評價指標(biāo)的評價關(guān)系矩陣R~:
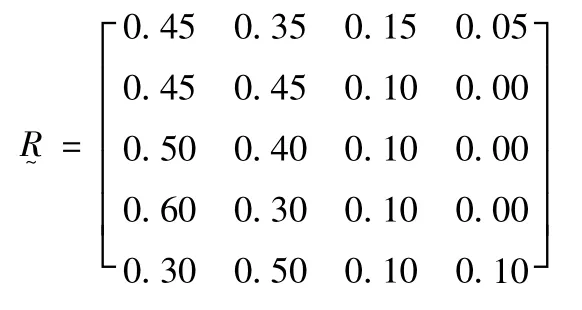
專家評定各指標(biāo)權(quán)重為[0.15,0.15,0.15,0.25,0.3],則該方案的綜合評判結(jié)果為[0.45,0.405,0.108,0.038],通過歸一化處理并按最大隸屬度原則,識別該方案評價結(jié)果為好。
5 結(jié)論
試驗方案是試驗實施的依據(jù),關(guān)系到試驗的成敗和試驗鑒定結(jié)果的準(zhǔn)確性。試驗方案設(shè)計是一項復(fù)雜的系統(tǒng)工程,影響試驗方案評價的指標(biāo)眾多,評價方法復(fù)雜多樣。本文對影響試驗方案優(yōu)劣的評價指標(biāo)及指標(biāo)評價方法進行了有益探索和研究,可為靶場試驗方案的設(shè)計和評估提供科學(xué)依據(jù)。
[1]葉利民,龔立,劉忠.兵棋推演系統(tǒng)設(shè)計與建模研究[J].計算機與數(shù)字工程,2011(12):58-61.
[2]孫艷英,楊榮芳,吳繼娟.非充分測量條件下實時定位方法探討[J].戰(zhàn)術(shù)導(dǎo)彈技術(shù),2007(4):60-62.
[3]朱華統(tǒng).常用大地坐標(biāo)系及其轉(zhuǎn)換[M].北京:解放軍出版社,1990:124-134.
[4]梁曉輝,趙沁平.改進的通視性檢查算法[J].軟件學(xué)報,2002,13(9):1840-1845.
[5]劉丙申,劉春魁,杜海濤.靶場外測設(shè)備精度鑒定[M].北京:國防工業(yè)出版社,2008:43-66.
[6]高冰,段一萍.靶場試驗外測系統(tǒng)精度估算方法[J].戰(zhàn)術(shù)導(dǎo)彈技術(shù),2003(9):31-36.
[7]徐克俊,金星,鄭永煌.航天發(fā)射場可靠性安全性評估與分析技術(shù)[M].北京:國防工業(yè)出版社,2006:183-201.
[8]王淼,王永杰.大射程高彈道反艦導(dǎo)彈威脅概率計算方法[J].火力與指揮控制,2012,37(3):211-214.
[9]譚躍進,陳英武,易進先.系統(tǒng)工程原理[M].長沙:國防科技大學(xué)出版社,1999:186-198.
[10]項磊,楊新,張揚,等.基于層次分析法與模糊理論的衛(wèi)星效能評估[J].計算機仿真,2013,30(2):55-61.
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級版)(2015年4期)2015-04-29 00:00:00