紅外尋的導彈舵機舵偏角速率需求分析
2015-07-01 07:56:02李友年陳星陽鄭鵾鵬
兵器裝備工程學報 2015年3期
關鍵詞:系統
李友年,王 霞,陳星陽,鄭鵾鵬
(中國空空導彈研究院,河南洛陽 471009)
紅外尋的導彈輸入噪聲主要有視線角測量噪聲、閃爍噪聲、目標均勻分布機動噪聲。本文從紅外尋的導彈輸入噪聲的角度,利用伴隨分析方法,對舵機舵偏角速率的需求進行了分析。
1 伴隨分析方法
伴隨技術是基于系統脈沖響應的,它能用于分析如導彈尋的回路這樣的線性時變系統。應用伴隨方法,可以得出在特定時間的任何量的確切性能估計,并可以得出所有干擾量對性能的影響信息。
1.1 伴隨系統產生方法
伴隨系統是通過對原始系統按照一定的變換規則加以變換得到的,對于線性時變系統,首先畫出它的狀態變量圖,然后按照以下規則變換[1]:
1)用tf– t 代換原系統中所有變系數的自變量時間t。
2)倒換所有信號的流動方向,并將分支點改為求和點,將求和點改為分支點,則原始系統的輸入端變為新系統的輸出端,原始系統的輸出端變為新系統的輸入端。
即,若原系統的狀態方程如式(1),則相應的以狀態空間描述給出的伴隨系統的表達式如式(2):
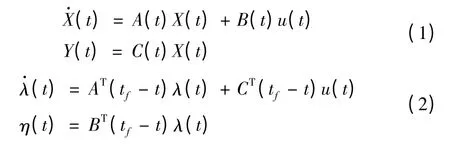
1.2 噪聲系統的伴隨模型
若線性系統的輸入為白噪聲,假定白噪聲的功率譜密度為φ,系統對噪聲的脈沖響應函數為h(t,τ),可得線形系統對白噪聲均方響應的數學期望[2-3]

其中:y(t)為線形系統對白噪聲的響應;τ 為脈沖發生時間;t為觀測時間。
根據式(1)、式(2)所述的原始系統與伴隨系統的基本關系,可得

令x=tf-τ,則有

則當t=tf時,有

由式(6)可知,當線形系統具有多個確定的白噪聲輸入時,對原始系統的白噪聲輸入變成伴隨系統的輸出,具有隨機輸入的線性系統的伴隨模型與原模型等效關系如圖1 所示。
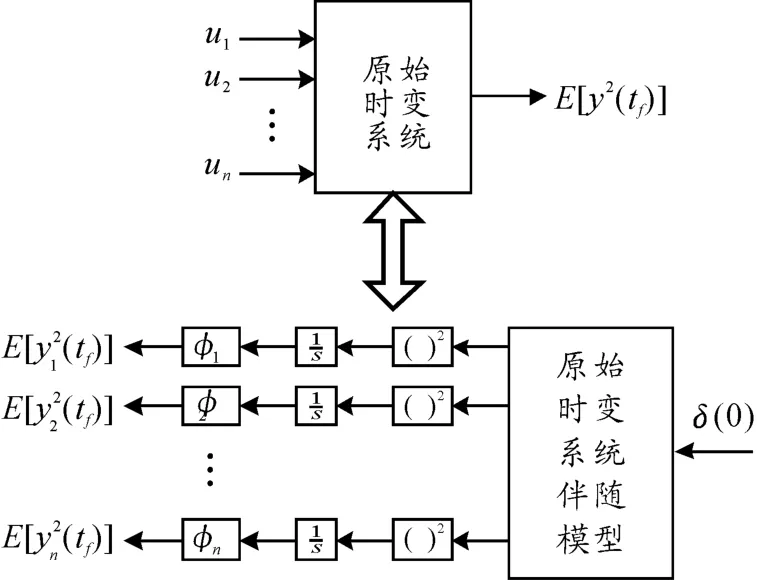
圖1 隨機輸入的伴隨模型與原模型等效關系
2 舵偏角速率需求分析
紅外尋的導彈輸入噪聲主要有視線角測量噪聲、閃爍噪聲、目標均勻分布機動噪聲。
紅外尋的導彈制導系統伴隨模型如圖2 所示。
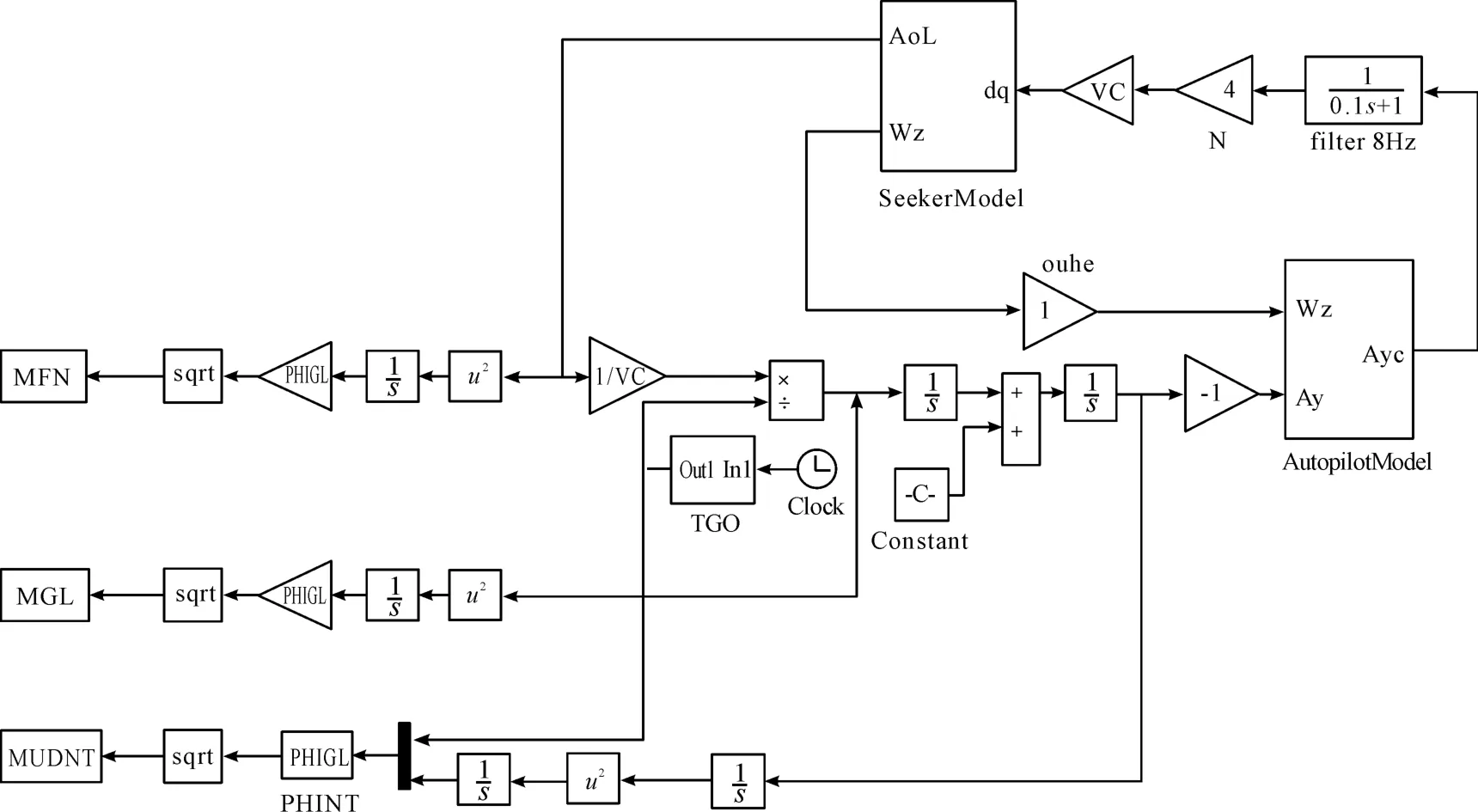
圖2 紅外尋的導彈制導系統伴隨模型
2.1 視線角測量噪聲對舵機角速率的需求分析
導彈高度10 km,導彈速度3 M,接近速度1 200 m/s,有效導航比取4,噪聲相關時間常數取0.01 s,引入視線角噪聲,噪聲均方根分別取0.5 mrad、1 mrad 和2 mrad(對應的像素數分別為1、2 和4)。仿真結果如圖3 所示,可知,當視線角噪聲為0. 5 mrad(1 個像素)時,需求的舵機角速率為55°/s。
2.2 閃爍噪聲對舵機角速率的需求分析
2.2.1 閃爍噪聲為白噪聲
導彈高度10 km,導彈速度3 M,接近速度1 200 m/s,有效導航比取4,模型中引入閃爍噪聲,噪聲的均方根分別取0.5 m、1 m 及1.5 m,噪聲相關時間常數取0.1 s,仿真結果如圖4 所示。
圖3 視線角噪聲對舵機角速率的需求
圖4 閃爍噪聲(白噪聲)對舵偏角速率的需求
由圖3 可知,舵機角速率隨著噪聲均方根的增大而增大,彈道末端,需求的舵機角速率增大。當噪聲均方根為0.5 m 時,在彈道結束前0.3s 所需的舵機角速率達到380°/s。
2.2.2 閃爍噪聲為隨機噪聲
對紅外導引頭而言,閃爍噪聲一般為跟蹤點跳動。由于閃爍噪聲具有低頻、自相關的特性,其帶寬與系統帶寬接近,一般不把閃爍噪聲近似為白噪聲。可利用白噪聲通過一個成形濾波器來等效閃爍噪聲

式中:Ts為系統采樣周期;TN為成形濾波器時間常數。
由隨機過程可知,若白噪聲通過的成形濾波器的傳遞函數為

則輸入白噪聲的功率譜密度為

其中:T 為濾波器時間常數;σ 為等效的隨機噪聲的均方根。因此在伴隨模型中引入成形濾波器,輸入白噪聲的功率譜密度如下

假定閃爍噪聲為隨機噪聲,采用白噪聲通過成形濾波器的方法來生成閃爍噪聲,成形濾波器的傳遞函數見式(8),白噪聲的功率譜密度按式(9)進行計算,系統的伴隨模型如圖5 所示。
采用上述伴隨模型進行仿真分析,其中導彈高度10 km,導彈速度3M,接近速度1 200 m/s,有效導航比取4,模型中引入閃爍噪聲,噪聲的均方根分別取0.5 m、1 m 及1.5 m,噪聲相關時間常數取0.1 s,仿真結果如圖6 所示。
由圖6 可知,對于特性為隨機噪聲的閃爍噪聲,當噪聲均方根為1 m 時,在彈道結束前0.3 s 時需求的舵機角速率為160°/s 。閃爍噪聲對舵機角速率的需求如表1 所示。
圖5 系統伴隨模型
圖6 閃爍噪聲(隨機噪聲)對舵偏角速率的需求仿真結果
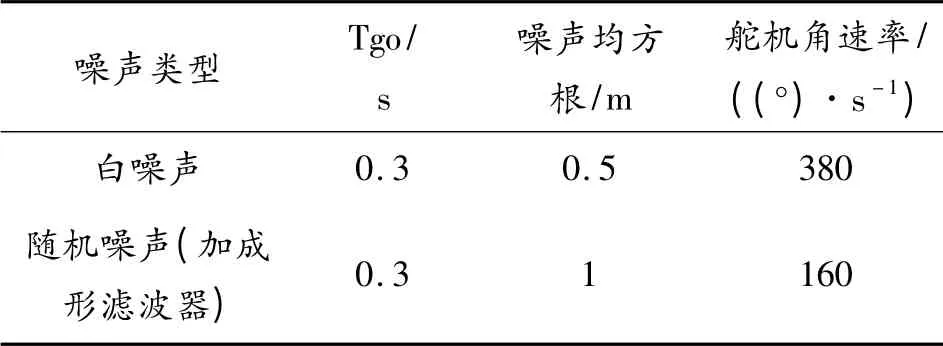
表1 閃爍噪聲需求的舵機角速率
2.3 目標機動對舵機角速率的需求
假設目標做6g 的均勻分布機動,需求的舵機角速率的均方根如圖7 所示。
由圖7 可知,目標機動對舵機角速率的需求很小,可忽略。
3 結論
目標機動對舵機角速率的需求很小,可忽略;
當視線角噪聲為0.5 mrad(1 個像素)時,需求的舵機角速率為55°/s;
閃爍噪聲對舵機角速率需求較大:當閃爍噪聲為隨機噪聲時,噪聲均方根在1 m 左右時,在彈道結束前0.3s 時所需的舵機角速率達到160°/s。

圖7 目標機動對舵偏角速率的需求
綜上可知,當視線角噪聲在0.5 mrad、閃爍噪聲為隨機噪聲且均方根在1 m 左右時,需求的舵機角速率不小于170°/s。
[1]林曉輝,崔乃剛,劉撴.伴隨理論及其在仿真中的應用研究[J].航天控制,1996(3):1-66.
[2]Paul Zarchan.Complete statistical analysis of nonlinear missile guidance systems-SLAM[Z].AIAA,77-1094.
[3]Paul Zarchan.Tactical and Strategic Missile Guidance[M].Fifth Edition.2006.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32