利用Matlab對六自由度并聯(lián)平臺進行分析與仿真
2015-06-29 17:37:16韋正曦
科技資訊 2015年15期
關(guān)鍵詞:分析
韋正曦
摘要:六自由度并聯(lián)平臺不僅在現(xiàn)代大型高科技設(shè)備運動模擬中扮演著相當(dāng)重要的角色,在機械可靠性測試,4D立體電影座椅,導(dǎo)彈發(fā)射機座等領(lǐng)域中也具有非常重要的地位。六自由度并聯(lián)由于自由度多、分析變量多、高度非線性耦合的關(guān)系復(fù)雜,需要進行大量的矩陣運算,所以傳統(tǒng)的編程軟件對此很難完成高精度、便捷、有效的編程分析。而利用Matlab強大、便捷的矩陣運算能力,就可以非常有效的解決六自由度并聯(lián)平臺這類多自由度或多關(guān)節(jié)的機構(gòu)分析和模擬仿真問題。
關(guān)鍵字:六自由度平臺 Matlab分析計算 設(shè)備模擬仿真 矩陣運算
中圖分類號:G71 文獻標(biāo)識碼:A 文章編號:1672-3791(2015)05(C)-0000-00
正文
前言:六自由度并聯(lián)平臺在航天交會對接模擬、汽車駕駛模擬、大型機械可靠性測試、各種設(shè)備駕駛員模擬訓(xùn)練、多媒體娛樂設(shè)備等非常多領(lǐng)域有著重要的應(yīng)用,研究六自由度并聯(lián)平臺有著重大意義和經(jīng)濟價值。六自由度并聯(lián)平臺由于應(yīng)用前景極為廣闊,近幾年,已經(jīng)引起了國內(nèi)外許多科研機構(gòu)和高等院校的研究興趣。由于六自由度平臺具有硬件簡單,分析模擬復(fù)雜,各桿直接耦合嚴重,邊界條件繁多,需要建立兩個空間坐標(biāo)系進行分析,并分析出六自由度平臺的位姿關(guān)系及三維空間變換矩陣。本文討論的是采用Matlab對六自由度平臺進行研究分析,并淺談一些研究方法、思路與Matlab對多自由度、多關(guān)節(jié)設(shè)備分析和模擬的優(yōu)勢。
一、六自由度并聯(lián)平臺的結(jié)構(gòu)特點介紹
六自由度并聯(lián)平臺有上下兩個平臺,下平臺為固定平臺、上平臺為工作平臺。每個平臺上以一定參數(shù)規(guī)律安裝著六個虎克鉸或萬向鉸。兩平臺之間有六個受控的伺服液壓缸,通過虎克鉸或萬向鉸與兩平臺連接。工作時通過控制六個液壓缸的伸縮運動,從而完成工作臺所需要的空間運動。對于一般串聯(lián)結(jié)構(gòu)的工業(yè)機器人來說,六自由度并聯(lián)平臺的剛度大、結(jié)構(gòu)穩(wěn)定。載荷分布在并聯(lián)的六個液壓缸上,使得工作臺的承載能力非常強。工作臺行程誤差比較小、位置精度高、動力性能優(yōu)越。
二、對六自由度并聯(lián)平臺的空間分析
3.1位置分析
為了方便分析工作平臺在空間中的位姿變換情況,需要在固定平臺上建立一個靜坐標(biāo)系O-XYZ,在工作平臺上建立一個連體坐標(biāo)系O1-xyz。
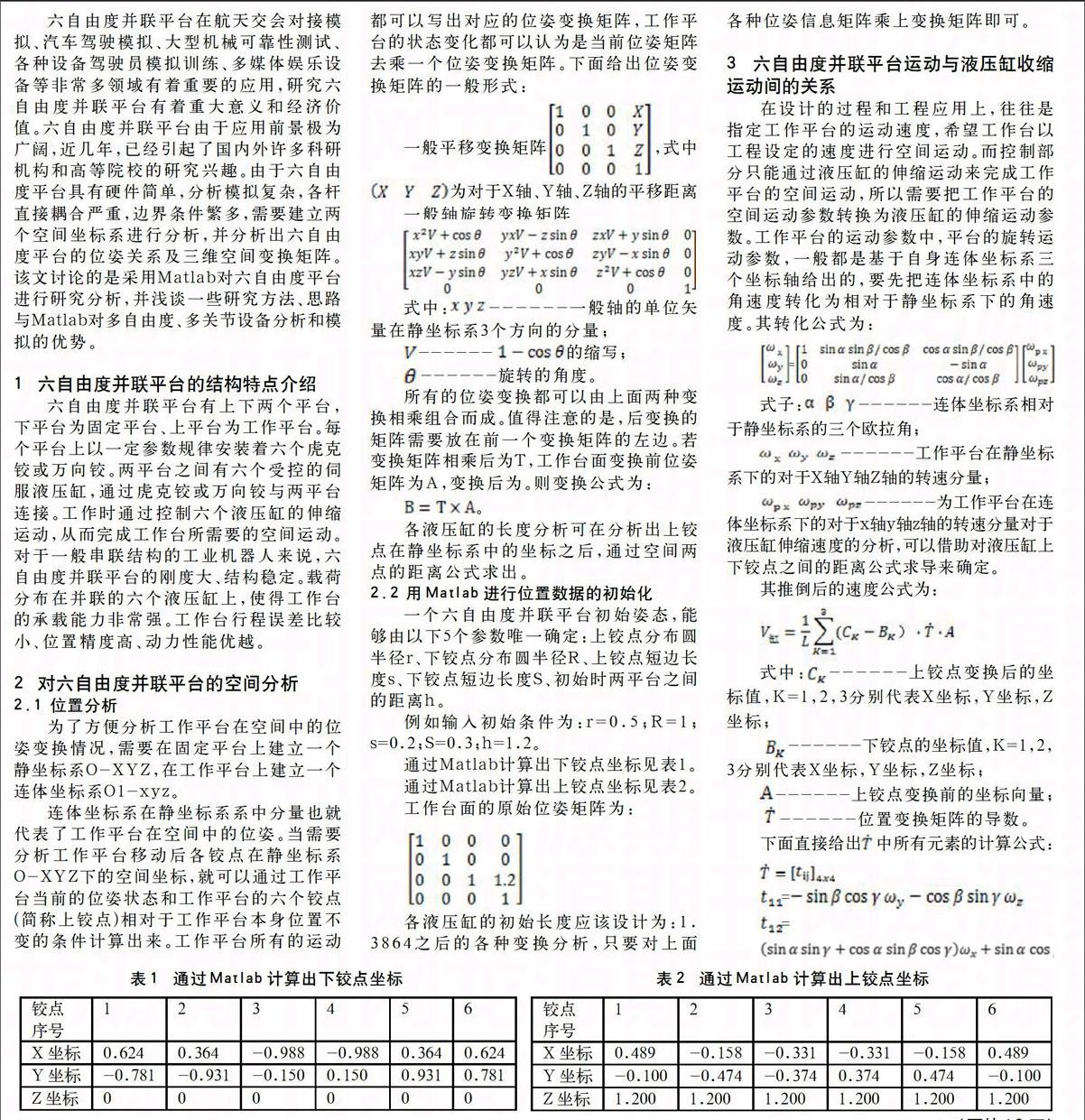
連體坐標(biāo)系在靜坐標(biāo)系系中分量也就代表了工作平臺在空間中的位姿。當(dāng)需要分析工作平臺移動后各鉸點在靜坐標(biāo)系O-XYZ下的空間坐標(biāo),就可以通過工作平臺當(dāng)前的位姿狀態(tài)和工作平臺的六個鉸點(簡稱上鉸點)相對于工作平臺本身位置不變的條件計算出來。工作平臺所有的運動都可以寫出對應(yīng)的位姿變換矩陣,工作平臺的狀態(tài)變化都可以認為是當(dāng)前位姿矩陣去乘一個位姿變換矩陣。下面給出位姿變換矩陣的一般形式:
一般平移變換矩陣 ,式中 為對于X軸、Y軸、Z軸的平移距離
一般軸旋轉(zhuǎn)變換矩陣
所有的位姿變換都可以由上面兩種變換相乘組合而成。值得注意的是,后變換的矩陣需要放在前一個變換矩陣的左邊。若變換矩陣相乘后為T,工作臺面變換前位姿矩陣為A,變換后為。則變換公式為:
各液壓缸的長度分析可在分析出上鉸點在靜坐標(biāo)系中的坐標(biāo)之后,通過空間兩點的距離公式求出。
3.2用Matlab進行位置數(shù)據(jù)的初始化
一個六自由度并聯(lián)平臺初始姿態(tài),能夠由以下5個參數(shù)唯一確定:上鉸點分布圓半徑r、下鉸點分布圓半徑R、上鉸點短邊長度s、下鉸點短邊長度S、初始時兩平臺之間的距離h。
工作臺面的原始位姿矩陣為:
各液壓缸的初始長度應(yīng)該設(shè)計為:1.3864
之后的各種變換分析,只要對上面各種位姿信息矩陣乘上變換矩陣即可。
三、六自由度并聯(lián)平臺運動與液壓缸收縮運動間的關(guān)系
在設(shè)計的過程和工程應(yīng)用上,往往是指定工作平臺的運動速度,希望工作臺以工程設(shè)定的速度進行空間運動。而控制部分只能通過液壓缸的伸縮運動來完成工作平臺的空間運動,所以需要把工作平臺的空間運動參數(shù)轉(zhuǎn)換為液壓缸的伸縮運動參數(shù)。工作平臺的運動參數(shù)中,平臺的旋轉(zhuǎn)運動參數(shù),一般都是基于自身連體坐標(biāo)系三個坐標(biāo)軸給出的,要先把連體坐標(biāo)系中的角速度轉(zhuǎn)化為相對于靜坐標(biāo)系下的角速度。其轉(zhuǎn)化公式為:
對于液壓缸伸縮速度的分析,可以借助對液壓缸上下鉸點之間的距離公式求導(dǎo)來確定。
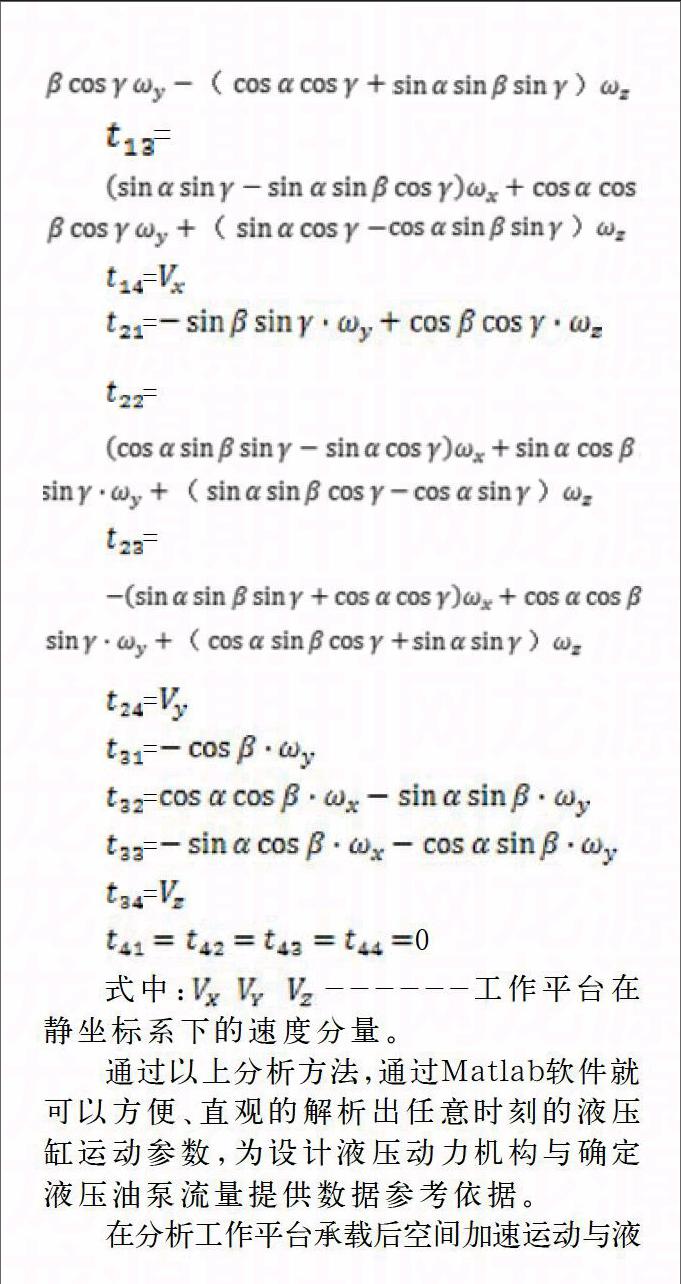
其推倒后的速度公式為。
通過以上分析方法,通過Matlab軟件就可以方便、直觀的解析出任意時刻的液壓缸運動參數(shù),為設(shè)計液壓動力機構(gòu)與確定液壓油泵流量提供數(shù)據(jù)參考依據(jù)。
在分析工作平臺承載后空間加速運動與液壓缸受力之間的關(guān)系時,這類六自由度并聯(lián)平臺的動力學(xué)問題分析方法有很多,例如:拉格朗日法、牛頓-歐拉法、虛構(gòu)原理法和影響系數(shù)法。對于用Matlab對六自由度并聯(lián)平臺編程分析來說拉格朗日法比較適合的,因為拉格朗日法以系統(tǒng)的動能和勢能為基礎(chǔ),不用分析機構(gòu)的真實運動,推到過程較簡單,能用形式簡潔的動力學(xué)方程表示出各構(gòu)件的耦合特性,這個方法不僅能用于動力學(xué)分析,還能用于動力學(xué)控制。通過Matlab能夠簡單的編程出算法,大量的復(fù)雜運算Matlab都能非常效率準(zhǔn)確的完成。
四、利用Matlab對六自由度并聯(lián)平臺仿真
Matlab給用戶提供一個名為simulink的系列工具軟件包。它能夠?qū)﹄x散系統(tǒng)、連續(xù)系統(tǒng)及連續(xù)離散的混合系統(tǒng)進行充分的建模和仿真。六自由度并聯(lián)平臺這類連續(xù)的系統(tǒng),一旦完成設(shè)計,用戶還可以借助工具生成嵌入式的代碼,進行編譯、連接之后,直接嵌入到硬件設(shè)備中。這樣無須手工編寫代碼和復(fù)雜的調(diào)試,就可以完成從動態(tài)系統(tǒng)設(shè)計到最后代碼實現(xiàn)的全過程,給后期控制系統(tǒng)程序的分析和燒寫提供了極大的便利。并且simulink支持非常多種類的硬件系統(tǒng),有著很直觀簡潔的圖形用戶界面,使用起來非常方便和靈活。使用Matlab對六自由度并聯(lián)平臺建立系統(tǒng)建模任務(wù),就是把適合數(shù)據(jù)分析的模塊按照建模要求連接起來即可。這些模塊可以是系統(tǒng)自帶的模塊,也可以是用戶根據(jù)需求自己編輯的模塊。如果對仿真結(jié)果不滿意,可以隨時調(diào)整各模塊的相關(guān)參數(shù)再進行仿真,直到達到預(yù)期效果。
五、結(jié)束語
六自由度并聯(lián)平臺研究和開發(fā)在未來的發(fā)展中,會有相當(dāng)重要的作用。這類多自由度或多關(guān)節(jié)的機構(gòu),在分析和仿真上是十分困難的,因為它們都涉及到大量的矩陣分析與矩陣運算。而Matlab這一款高級語言就能很好的幫助解決這些困難。使用Matlab對這類復(fù)雜的機構(gòu)分析,是十分便捷和有效的,加上Matlab的強大模擬仿真能力和對侵入式芯片開發(fā)的便捷性,使得Matlab在六自由度并聯(lián)平臺進行分析與仿真上有著得天獨厚的優(yōu)勢。本文希望能給研究六自由度并聯(lián)平臺的朋友起到借鑒作用。
參考文獻
[1]趙強.運動模擬器并聯(lián)六自由度平臺的理論和應(yīng)用.東北林業(yè)大學(xué)出版社,2008
[2]孫樹棟.工業(yè)機器人技術(shù)基礎(chǔ).西北工業(yè)大學(xué)出版社,2006
[3]劉浩,韓晶.MATLAB R2012a完全自學(xué)一本通.電子工業(yè)出版社,2012
[4]黃真,孔令富,方躍法.并聯(lián)機器人結(jié)構(gòu)學(xué)理論及控制.機械工業(yè)出版社,1997
猜你喜歡
現(xiàn)代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設(shè)計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
當(dāng)代經(jīng)濟研究(2016年5期)2016-12-01 03:12:05
現(xiàn)代農(nóng)業(yè)(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫(yī)藥現(xiàn)代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學(xué)學(xué)報(社會科學(xué)版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06