北斗衛(wèi)星導(dǎo)航系統(tǒng)在工程測(cè)量中的研究與應(yīng)用
2015-06-28 06:14:50郭桂川
城市勘測(cè) 2015年1期
關(guān)鍵詞:系統(tǒng)
郭桂川
(中鐵建工集團(tuán)有限公司北京分公司,北京 100070)
1 引 言
中國(guó)自主發(fā)展,獨(dú)立運(yùn)行的北斗衛(wèi)星導(dǎo)航系統(tǒng)(BeiDou)計(jì)劃到2020年共發(fā)射5 顆靜止軌道衛(wèi)星和30 顆非靜止軌道衛(wèi)星,從而實(shí)現(xiàn)覆蓋全球的北斗衛(wèi)星導(dǎo)航系統(tǒng)。目前,北斗衛(wèi)星系統(tǒng)已經(jīng)發(fā)射了16 顆衛(wèi)星(5 顆IGSO 衛(wèi)星,5 顆MEO 衛(wèi)星和6 顆GEO 衛(wèi)星),具備了亞太地區(qū)的定位,導(dǎo)航和授時(shí)以及短報(bào)文通信服務(wù)能力。隨著北斗衛(wèi)星導(dǎo)航系統(tǒng)的發(fā)展,北斗衛(wèi)星定位在國(guó)防與工程測(cè)量中的應(yīng)用也越來(lái)越廣泛,同時(shí)對(duì)北斗衛(wèi)星系統(tǒng)與GPS(美國(guó)全球定位系統(tǒng))的兼容與互操作性的研究也將變得越來(lái)越重要。多系統(tǒng)的衛(wèi)星定位不僅增加了可用衛(wèi)星的數(shù)量,同時(shí)也提高了定位精度以及定位的可靠性[1]。
鑒于衛(wèi)星定位在工程測(cè)量中的廣泛應(yīng)用,研究北斗衛(wèi)星系統(tǒng)的定位結(jié)果具有很重要的參考與指導(dǎo)意義,尤其是與GPS 的定位結(jié)果的比較和兩個(gè)系統(tǒng)組合的定位結(jié)果的分析。因此,本文建立了適合與多系統(tǒng)組合單點(diǎn)定位的數(shù)學(xué)模型和隨機(jī)模型。通過(guò)實(shí)測(cè)的兩組不同地點(diǎn)的,長(zhǎng)時(shí)間的北斗和GPS 數(shù)據(jù),首先比較了北斗和GPS 單獨(dú)單點(diǎn)定位的結(jié)果,然后分析了兩個(gè)系統(tǒng)組合之后的單點(diǎn)定位結(jié)果。結(jié)果顯示,北斗衛(wèi)星系統(tǒng)單點(diǎn)定位的結(jié)果與美國(guó)GPS 單點(diǎn)定位的結(jié)果在亞太地區(qū)很接近,在一般的觀測(cè)情況下,靜態(tài)的定位結(jié)果水平方向上基本穩(wěn)定在5 m左右,高程方向穩(wěn)定在10 m左右。而兩個(gè)系統(tǒng)組合則可以增加衛(wèi)星數(shù)量,改善定位精度,提高定位的可靠性,特別適合遮擋比較嚴(yán)重的環(huán)境單系統(tǒng)衛(wèi)星定位不足的情況。
2 單點(diǎn)定位的基本模型及參數(shù)估計(jì)
隨著全球?qū)Ш叫l(wèi)星系統(tǒng)(GNSS)技術(shù)的發(fā)展,目前已經(jīng)有許多種定位方式來(lái)滿(mǎn)足各種各樣的測(cè)量,導(dǎo)航需求,例如單點(diǎn)定位,差分定位,RTK 等。其中單點(diǎn)定位是相對(duì)來(lái)說(shuō)最簡(jiǎn)單,快速,有效的可以達(dá)到5 m左右精度的定位方法,因此廣泛引用于工程測(cè)量,車(chē)載導(dǎo)航等領(lǐng)域。
2.1 建立數(shù)學(xué)模型
單點(diǎn)定位的數(shù)學(xué)模型可以建立如下[2,3]:

式中:P 表示偽距觀測(cè)值;ρ 表示衛(wèi)星到接收機(jī)之間的幾何距離;tr+t5分別表示接收機(jī)鐘差和衛(wèi)星鐘差;c 表示光速;T 和I 分別表示對(duì)流層延遲和電離層延遲。v 為觀測(cè)誤差,本文認(rèn)為多路徑延遲也歸到觀測(cè)誤差里面。由式(1)可以得出,除了接收機(jī)和衛(wèi)星自身的鐘差,單點(diǎn)定位的結(jié)果受對(duì)流層和電離層的影響較大。在實(shí)際應(yīng)用中,一般可以采用模型進(jìn)行改正,本文采用比較常用的對(duì)流層改正模型霍普菲爾德(Hopfield)模型和電離層模型克羅布歇(Klobuchar)模型[2,3]。
一般情況下需要給出一個(gè)接收機(jī)的初始坐標(biāo)X0將式(1)進(jìn)行線(xiàn)性化,從而可以將式(1)進(jìn)一步推導(dǎo)為:

式(2)的左邊l 為觀測(cè)值減去已知值,其中ρ0表示由初始坐標(biāo)計(jì)算的衛(wèi)星與接收機(jī)之間的距離。A=[AcE]和x=[xctr]T分別表示設(shè)計(jì)矩陣和未知數(shù)向量。Ac和xc分別表示線(xiàn)性化后的坐標(biāo)設(shè)計(jì)矩陣坐標(biāo)增量。E 表示鐘差的系數(shù)單位矩陣。
式(2)是針對(duì)單系統(tǒng)的單點(diǎn)定位而建立的模型,隨著GNSS 的發(fā)展,多系統(tǒng)的衛(wèi)星定位顯得越來(lái)越重要。考慮到不同系統(tǒng)具有不同的時(shí)間參考系統(tǒng),因此北斗和GPS 組合定位的模型需要加上一個(gè)(北斗基于GPS 或者GPS 基于北斗的)時(shí)間系統(tǒng)偏差進(jìn)行估計(jì),或者建模時(shí)北斗系統(tǒng)的鐘差和GPS 系統(tǒng)的鐘差分開(kāi)建立。類(lèi)似的,在北斗和其他系統(tǒng)(如Galileo,GLONASS)等系統(tǒng)組合定位時(shí)也需要加上一個(gè)時(shí)間系統(tǒng)偏差或者增加一個(gè)鐘差未知數(shù)。
相應(yīng)的,需要建立適當(dāng)?shù)碾S機(jī)模型來(lái)描述觀測(cè)值的精度,如下:

式中,D 和σ2表示觀測(cè)方差陣和先驗(yàn)方差(本文設(shè)為1 m);Q 和P 表示方差系數(shù)陣和權(quán)陣;a 和b 為經(jīng)驗(yàn)值,本文取0.3,sin(el)為高度角求正弦值。
2.2 參數(shù)估計(jì)
參數(shù)估計(jì)可以采用最小二乘估計(jì)或者卡爾曼濾波估計(jì)兩種方式。對(duì)于單歷元求解的單點(diǎn)定位來(lái)說(shuō),兩者估計(jì)的原理和結(jié)果基本一致。由式(1)和(3),可以根據(jù)最小二乘估計(jì)的準(zhǔn)則(VTPV=min),得出未知數(shù)向量的增量估計(jì)和方差陣如下[4]:

在實(shí)際的定位過(guò)程中,一般情況下需要加上粗差檢測(cè)來(lái)剔除觀測(cè)誤差比較大的衛(wèi)星。本文采用了比如常用粗差探測(cè)法來(lái)剔除觀測(cè)質(zhì)量差的衛(wèi)星,具體實(shí)現(xiàn)過(guò)程可參考文獻(xiàn)[5]。
3 定位結(jié)果分析
為了測(cè)試北斗單點(diǎn)定位的效果,與GPS 單點(diǎn)定位的結(jié)果進(jìn)行比較以及分析兩個(gè)系統(tǒng)組合定位的結(jié)果,我們?cè)诒本┎杉藘山M位于不同地點(diǎn)的靜態(tài)數(shù)據(jù)。第一組數(shù)據(jù)時(shí)長(zhǎng)為15 h15 min,觀測(cè)條件良好。第二組數(shù)據(jù)時(shí)長(zhǎng)為41 h27 min,周?chē)猩僭S高樓遮擋,觀測(cè)條件稍差。所有采集的數(shù)據(jù)都包含了北斗和GPS 衛(wèi)星。通過(guò)采用修改后的開(kāi)源GNSS 數(shù)據(jù)處理軟件RTKLIB[6],對(duì)這兩組數(shù)據(jù)進(jìn)行了處理分析。
3.1 單系統(tǒng)定位結(jié)果分析
兩組數(shù)據(jù)所采用的北斗衛(wèi)星數(shù)和GPS 衛(wèi)星數(shù)分別如圖1 和圖2。數(shù)據(jù)1 中,北斗和GPS 衛(wèi)星的數(shù)量都在8 顆~12 顆。因組合前后的粗差探測(cè)閾值選取(跟自由度相關(guān))不同,兩個(gè)系統(tǒng)組合后的衛(wèi)星有時(shí)候并不一定等于單系統(tǒng)所用衛(wèi)星之和。數(shù)據(jù)2 中北斗衛(wèi)星的數(shù)量在5 顆~12 顆之間,而GPS 的衛(wèi)星數(shù)則在7顆~12 顆之間。從圖1 和圖2 都可以看出,北斗和GPS 的系統(tǒng)組合可以使衛(wèi)星數(shù)最高達(dá)到23 顆,顯著提高了可用衛(wèi)星數(shù)量。這種多系統(tǒng)組合定位可以改善定位效果,特別適合于有遮擋環(huán)境下單系統(tǒng)衛(wèi)星數(shù)不足的情況。
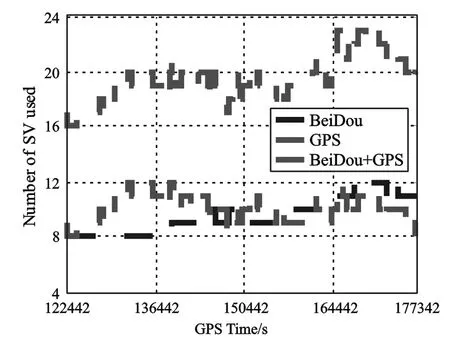
圖1 單點(diǎn)定位所用的衛(wèi)星數(shù)(數(shù)據(jù)1)
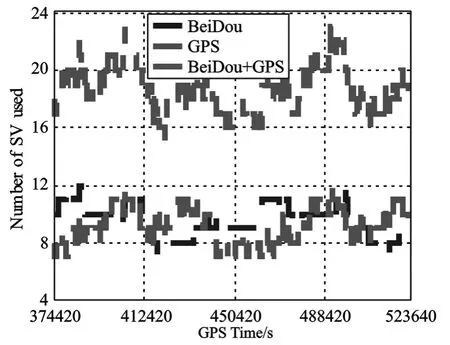
圖2 單點(diǎn)定位所用的衛(wèi)星數(shù)(數(shù)據(jù)2)
圖3 和圖4 顯示了第一組數(shù)據(jù)的單獨(dú)的北斗系統(tǒng)和GPS 系統(tǒng)單點(diǎn)定位的結(jié)果與真實(shí)的坐標(biāo)值之間的差。注意圖中縱軸單位為m。從第一組數(shù)據(jù)可以看出,北斗系統(tǒng)在緯度方向上定位偏差為2.0 m,比GPS的1.2 m要差,但是經(jīng)度方向上的1.4 m 比GPS 的2.7 m要好。無(wú)論經(jīng)度和緯度兩個(gè)系統(tǒng)在水平方向上都穩(wěn)定在3 m以?xún)?nèi)。而高程方面兩個(gè)系統(tǒng)都比水平方面差些,不過(guò)也基本在5 m 以?xún)?nèi)(分別為4.9 m 和4.8 m)。
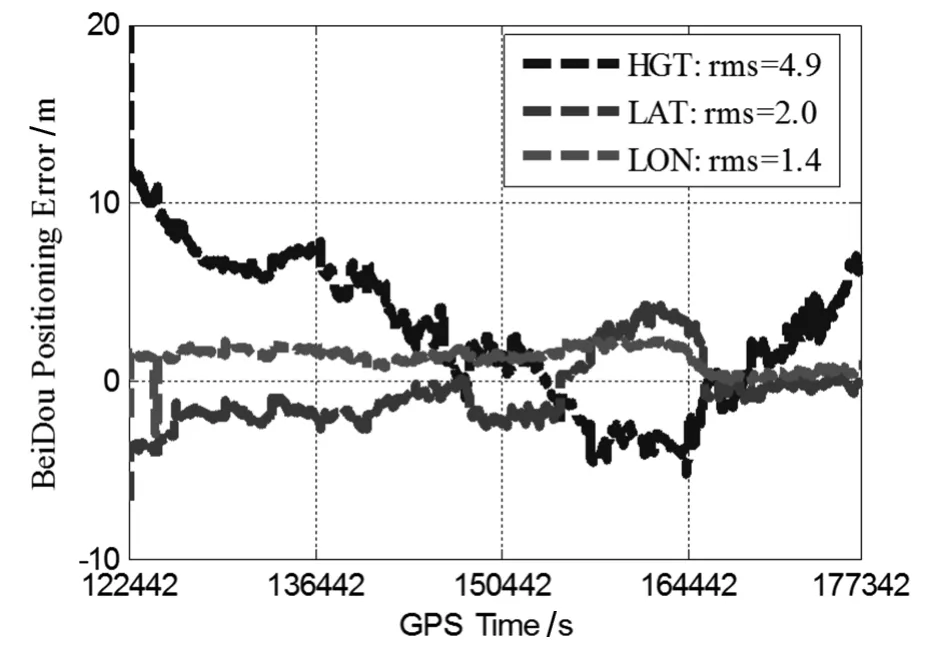
圖3 北斗單點(diǎn)定位結(jié)果(數(shù)據(jù)1)
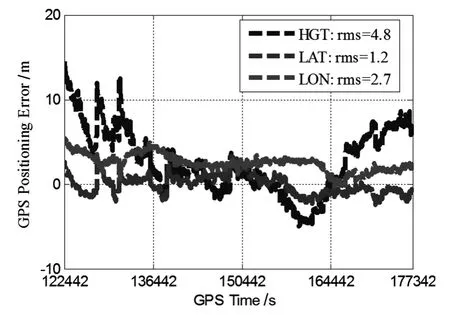
圖4 GPS 單點(diǎn)定位結(jié)果(數(shù)據(jù)1)
圖5 和圖6 給出了第二組數(shù)據(jù)的單系統(tǒng)的定位結(jié)果。可以看出,與第一組數(shù)據(jù)相比較,第二組數(shù)據(jù)的定位結(jié)果稍微差些。在衛(wèi)星數(shù)相當(dāng)?shù)那闆r下,原因是由于數(shù)據(jù)2 周?chē)亩嗦窂秸`差比較明顯。單北斗的定位結(jié)果水平方向上為4.6 m(緯度)和1.5 m(經(jīng)度),高程定位偏差為9.3 m。而GPS 系統(tǒng)在水平方向上為5.7 m(緯度)和1.9 m(經(jīng)度),在高程方向上的定位精度為8.0 m。

圖5 北斗單點(diǎn)定位結(jié)果(數(shù)據(jù)2)
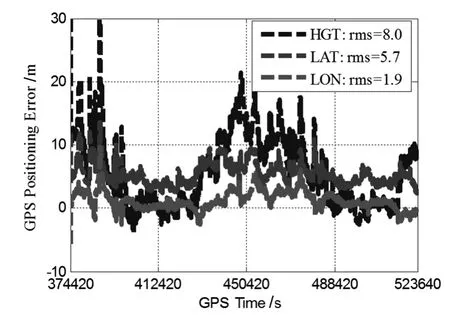
圖6 GPS 單點(diǎn)定位結(jié)果(數(shù)據(jù)2)
通過(guò)分析這兩組數(shù)據(jù)單系統(tǒng)的定位結(jié)果,可以得出北斗系統(tǒng)單獨(dú)定位的結(jié)果與GPS 單獨(dú)定位的結(jié)果類(lèi)似,觀測(cè)條件好的情況下水平定位結(jié)果在2.5 m左右,高程定位結(jié)果在5 m左右。而在觀測(cè)條件差的情況下水平定位結(jié)果在6 m左右,高程定位結(jié)果在10 m左右。
3.2 多系統(tǒng)定位結(jié)果分析
多系統(tǒng)的定位模型需要考慮不同系統(tǒng)所具有的不同的時(shí)間參考系統(tǒng),因此本文在處理多系統(tǒng)時(shí)各自系統(tǒng)的接收機(jī)的鐘差進(jìn)行估計(jì),相當(dāng)于增加了一個(gè)鐘差未知數(shù)。
圖7 顯示了數(shù)據(jù)1 的北斗和GPS 組合定位結(jié)果。可以看出,與單北斗系統(tǒng)或者單GPS 系統(tǒng)相比,定位結(jié)果穩(wěn)定平滑,有小幅度的改善。在水平方向上精度為0.8 m(緯度)和2.3 m(經(jīng)度),在高程方向上為4.2 m。從表1 可以得出,多系統(tǒng)定位在緯度和高程方向上都有明顯改善,而經(jīng)度方向上由于GPS 定位結(jié)果較差,多系統(tǒng)的定位結(jié)果優(yōu)于GPS 但是沒(méi)有北斗定位好。
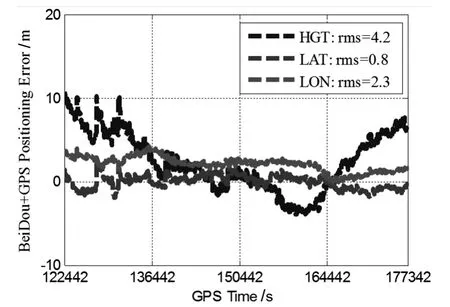
圖7 北斗+GPS 單點(diǎn)定位結(jié)果(數(shù)據(jù)1)
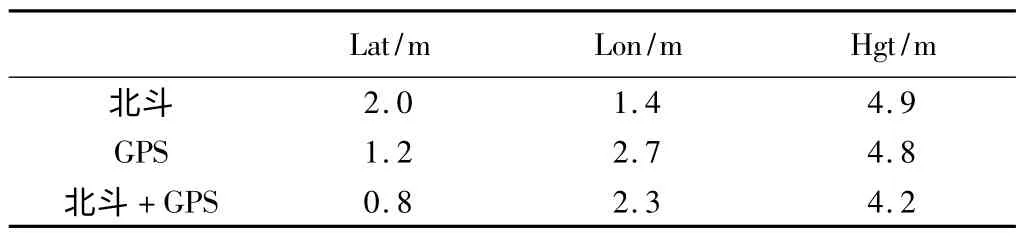
多系統(tǒng)與單系統(tǒng)的定位結(jié)果比較(數(shù)據(jù)1) 表1
圖8 給出了數(shù)據(jù)2 的北斗和GPS 系統(tǒng)組合定位結(jié)果。與數(shù)據(jù)1 的結(jié)果類(lèi)似,組合后的定位結(jié)果比較平滑穩(wěn)定,說(shuō)明了多系統(tǒng)的衛(wèi)星定位不僅提高了觀測(cè)衛(wèi)星數(shù)和定位結(jié)果,同時(shí)也提高了定位結(jié)果的可靠性。從表2 得出組合后的定位結(jié)果水平方向上為5.5 m(緯度)和1.4 m(經(jīng)度),高程為7.8 m。經(jīng)度和高程都優(yōu)于單系統(tǒng)的定位結(jié)果。緯度方向比GPS 要好,但是略差于北斗。
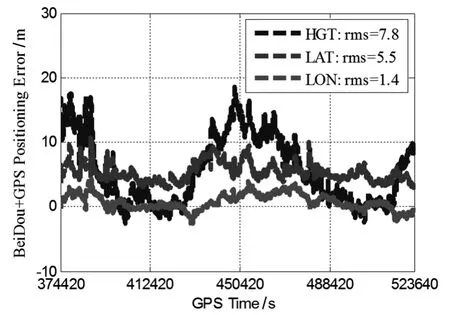
圖8 北斗+GPS 單點(diǎn)定位結(jié)果(數(shù)據(jù)2)
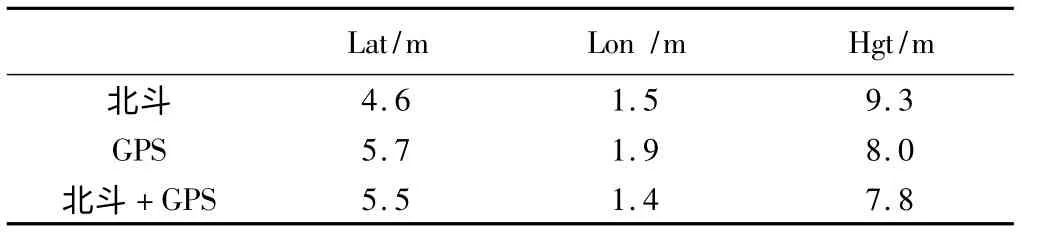
多系統(tǒng)與單系統(tǒng)的定位結(jié)果比較(數(shù)據(jù)2) 表2
通過(guò)圖7 和圖8 可以得出,兩個(gè)系統(tǒng)的組合對(duì)最終的定位結(jié)果的改善并不是很大,但是增加了衛(wèi)星觀測(cè)數(shù)量,從一定程度上提高了定位結(jié)果的可靠性,特別是在觀測(cè)條件差,對(duì)于單系統(tǒng)衛(wèi)星數(shù)少的情況下。
4 結(jié)論與展望
本文分析比較了北斗衛(wèi)星導(dǎo)航定位系統(tǒng)和GPS 單點(diǎn)定位的結(jié)果。通過(guò)處理實(shí)測(cè)數(shù)據(jù)可以得出,單系統(tǒng)的北斗單點(diǎn)定位結(jié)果與GPS 的定位結(jié)果類(lèi)似,在亞太地區(qū)基本可以替代GPS 衛(wèi)星系統(tǒng)。在觀測(cè)條件良好的情況下水平定位結(jié)果基本在3 m左右,滿(mǎn)足一些工程測(cè)量的應(yīng)用。同時(shí),通過(guò)建立多系統(tǒng)導(dǎo)航定位的模型,分析比較了單系統(tǒng)和多系統(tǒng)的定位結(jié)果。結(jié)果顯示,多系統(tǒng)的定位結(jié)果在觀測(cè)條件良好的情況下水平方向上為2.5 m左右,略?xún)?yōu)于單系統(tǒng)的定位結(jié)果。同時(shí)多系統(tǒng)的定位結(jié)果與單系統(tǒng)定位結(jié)果相比更加平滑可靠。因此北斗系統(tǒng)和GPS 系統(tǒng)的組合應(yīng)用前景將更加廣泛。
[1]中國(guó)衛(wèi)星導(dǎo)航系統(tǒng)管理辦公室.北斗衛(wèi)星導(dǎo)航系統(tǒng)空間信號(hào)借口控制文件[Z].北京:2013,12.
[2]李征航,張小紅.衛(wèi)星導(dǎo)航定位新技術(shù)及高精度數(shù)據(jù)處理方法[M].武漢:武漢大學(xué)出版社,2009.
[3]謝鋼.GPS 原理與接收機(jī)設(shè)計(jì)[M].北京:電子工業(yè)出版社,2009,423.
[4]LI,T.,Wang,J.Some remarks on GNSS integer ambiguity validation methods.Survey Review,2012,230~238.
[5]Baarda,W.A testing procedure for use in geodetic networks.Geodesy,2(5).Netherlands Geodetic Commission,Delft,1968.
[6]Takasu,T.,Yasuda,A.Development of the Low-Cost RTK-GPS Receiver with an open source program package RTKLIB.Proceedings of the International Symposium on GPS/GNSS.Korea,Jeju,2009,4~6.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(xiāo)(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
