2m×2m超聲速風洞CTS測控系統研制
2015-06-22 14:08:09黃敘輝張征宇高榮釗
實驗流體力學 2015年4期
李 平, 黃敘輝, 周 潤, 張征宇, 高榮釗
(中國空氣動力研究與發展中心, 四川 綿陽 621000)
2m×2m超聲速風洞CTS測控系統研制
李 平*, 黃敘輝, 周 潤, 張征宇, 高榮釗
(中國空氣動力研究與發展中心, 四川 綿陽 621000)
為滿足2m量級超聲速風洞外掛物捕獲軌跡試驗的需要,研制了2m×2m超聲速風洞CTS試驗裝置,開發了相應的信號測量與運動控制系統。為確保CTS速度閉環控制試驗方式的實現,選擇了具有集中控制的多層分布式結構,以滿足該試驗方式對測控系統的實時數據處理及信息交互能力的較高要求。系統由信號測量與軌跡運動方程求解子系統、六自由度裝置運動控制子系統和安全監控子系統等構成。采用NI公司的圖形化編程語言LabVIEW開發了監控管理軟件、數據采集和軌跡生成軟件、安全監控軟件。采用力士樂公司的IndraWorks完成了運動控制執行軟件的開發。子系統間分別運用了TCP/IP、PSP、Profibus DP等通訊協議實現信息交互。解決了系統抗沖擊及速度控制等關鍵技術難題。研制完成后采用T3-40激光跟蹤儀對六自由度裝置的靜態精度進行了測量,其中線位移X、Y、Z的定位精度達到0.021、0.046和0.094mm,角位移α、β、γ的定位精度達到0.05°、0.047°和0.022°,定位精度全部優于設計指標(±0.1mm、±0.1mm、±0.1mm、0.05°、0.05°和0.05°)。地面調試和風洞試驗驗證表明:CTS測控系統運行穩定,操作方便,維護簡便,試驗結果合理、可靠。
超聲速;風洞;測控系統;六自由度機構;速度控制
0 引 言
捕獲軌跡(Captive Trajectory Simulation,簡稱CTS)試驗是在風洞中應用的一種特種試驗技術,用來模擬外掛物從載機分離后的運動軌跡,為評估外掛物的安全特性提供依據[1]。
發達國家開展捕獲軌跡試驗研究較早(20世紀50年代)[2],技術比較成熟。中國空氣動力研究與發展中心于1988年在1.2m跨超聲速風洞中建立了第一代外掛物捕獲軌跡試驗(CTS)系統,并在2005年成功研制了第二代CTS試驗系統,同年研制完成了2.4m跨聲速風洞CTS試驗系統。
2m×2m超聲速風洞(以下簡稱為2m超)是中國空氣動力研究與發展中心(China Aerodynamics Research and Development Center,CARDC)于2010年底建成的一座下吹、引射式暫沖型超聲速增壓風洞,具有試驗尺度大、流場指標優良和數據精準度高等特點,是我國先進戰斗機、戰略戰術武器等型號研制的最佳地面模擬試驗平臺。為使其具備CTS試驗能力,研制了2m超風洞CTS系統,該系統于2012年研制完成并投入使用。
1 系統任務及主要性能指標
CTS試驗是通過CTS測控系統、六自由度裝置和風洞的協調工作來實現對外掛物投放軌跡的模擬測試。具體方法是:CTS測控系統根據實時測得外掛物的氣動載荷,解運動方程,并控制六自由度裝置(見圖1)支撐的外掛物運動到解算的位置和姿態,循環往復。此方法簡稱為CTS位置控制方法。
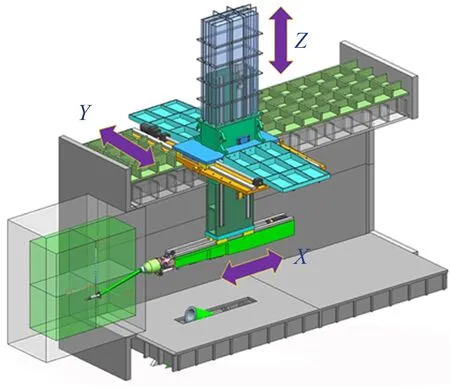
圖1 六自由度裝置結構示意圖
Fig.1 Structure schematic of the six degree-of-freedom device
2m超CTS測控系統的任務就是精確測量風洞中外掛物模型的氣動載荷,求解運動方程,控制六自由度裝置運動并監控設備運動狀態。其中,信號測量的精準度要求0.03%,六自由度裝置3個線位移的控制精準度要求為0.1mm,3個角位移的控制精準度要求為0.05°。
此外,該系統還要實現CTS的速度控制方法,即在CTS試驗過程中通過持續的測量和解算,控制外掛物模型的運動速度和姿態等,完成對外掛物連續運動軌跡的測量。由于進行速度控制時外掛物模型持續運動不停頓,因此有運動軌跡點連貫且比較節能的優點,但同時對系統的實時性和同步性要求較高。
2 系統硬件結構與組成
2m超CTS測控系統的硬件部分采用了具有集中控制的多層分步式結構的框架設計,在設備的選購上盡可能使用成熟產品,以保證CTS測控系統的高性能、可擴展和易維護。系統總體構成如圖2所示。根據CTS測控系統的任務及特點,將系統拆分為3個子系統:(1) 測量與運動方程求解系統;(2) 六自由度裝置運動控制系統;(3) 安全監控系統。
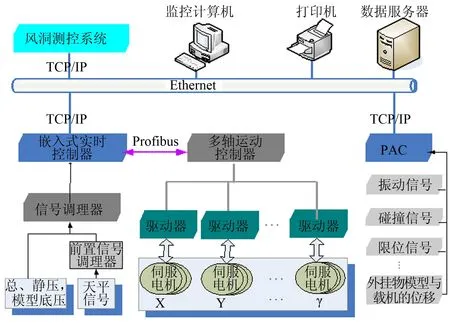
圖2 測控系統組成Fig.2 Constitution of the measurement and control system
2.1 測量與運動方程求解系統
測量與運動方程求解系統的功能包括精確測量安裝于外掛物模型內部的天平傳感器的信號、尾部的底壓傳感器信號及風洞的總、靜壓信號,計算氣動系數并與輸入的外掛物初始條件(如初始位置、角度和速度等)、飛行參數(如飛機的姿態角、飛行高度、速度以及外掛物的質量、慣性矩、阻尼導數、推力和彈射力等)一起,通過求解運動方程,獲得外掛物在下一時刻的運動速度或位置。其中,外掛物運動方程組求解過程復雜、計算量大。
為此,系統選用了美國NI公司PXI RT(Real-time)嵌入式控制器作為硬件平臺,配置了實時控制器、高速采集卡、總線通訊卡和信號調理器等硬件設備。其中,前置信號調理器位于六自由度裝置內靠近天平的位置,用于增強天平信號的抗干擾能力。
2.2 六自由度裝置運動控制系統
六自由度裝置運動控制系統的功能是準確控制六自由度裝置按照位置或速度進行運動。根據載荷及使用維護要求,驅動形式為伺服電機驅動。
為此,選用了德國力士樂公司的基于Sercos III總線的運動控制系統,主要由多軸運動控制器、6臺伺服電機(其中滾轉自由度由中空力矩電機控制)及相應的驅動器組成。同時,受六自由度裝置的結構形式限制,無法安裝外置編碼器,故在每臺伺服電機內配置了絕對編碼器。
2.3 安全監控系統
因外掛物的運動軌跡在試驗前是不可知的,加之外掛物的天平和支桿較細,所以CTS試驗存在著極大的不安全因素,如試驗時外掛物模型與載機、風洞試驗段壁板等可能發生碰撞,機構運動可能失控超過設定的極限位置等,如不采取措施可能損壞模型、天平和六自由度機構;此外,在超聲速氣流的沖擊下,六自由度裝置可能會產生振動,影響其正常運動及定位的精度。因此,安全監控系統的作用就是實時監控六自由度設備各個自由度的當前位置、振動情況,運動是否超限等,及時制動,保護設備安全。
為此,選用了NI公司的PAC系統作為獨立的安全監控系統,該子系統由一套CompactRIO(cRIO)系統設備組成,其中機箱型號為NI-9116,嵌入式控制器為NI cRIO-9024,32路數字量輸入采集卡為NI-9426,32路數字量輸出卡為NI-9477,4路振動信號輸入采集卡為NI-9234,4路模擬量輸入采集卡為NI-9222。
六自由度機構運動極限限位信號、緊急停止信號、碰撞信號、設備上電狀態和故障信息等由NI-9426輸入,機構振動信號由NI-9234輸入,外掛物模型與母機位移及Z軸平衡氣缸壓力等信號由NI-9222輸入,聯絡信號、報警信號、驅動器通斷電信號等由NI-9477輸出。
上位機將編制好的安全監控程序部署到嵌入式實時控制器cRIO-9024中運行,確保程序運行的可靠性和確定性。另外,通過RIO(可重復配置)I/O技術將處理器、FPGA和定制化的I/O結合在一起,實現了系統對外部I/O信號的實時響應,通過這些技術實現對六自由度裝置運動過程中碰撞信號、振動信號、伺服驅動控制系統工作狀態(包括上電、使能等)、限位信號,外掛物模型初始定位時與載機的位移量,緊急停止信號和平衡氣缸壓力信號等的快速檢測及響應,達到保護設備的目的。
3 系統軟件設計及實現
CTS測控系統的軟件共分為4部分,分別是:運行在監控管理計算機上的監控管理軟件;運行在嵌入式實時控制器上的數據采集和軌跡生成軟件;運行在多軸運動控制器上的運動控制執行軟件;運行在PAC系統上的安全監控軟件。各部分的功能和系統間的通信方式如圖3所示。其中,監控管理軟件、數據采集和軌跡生成軟件、安全監控軟件在Windows環境下采用NI公司的圖形化編程語言LabVIEW開發,運動控制執行軟件在Windows環境下使用力士樂公司IndraWorks進行開發。下面就軟件開發過程中的關鍵技術進行介紹。
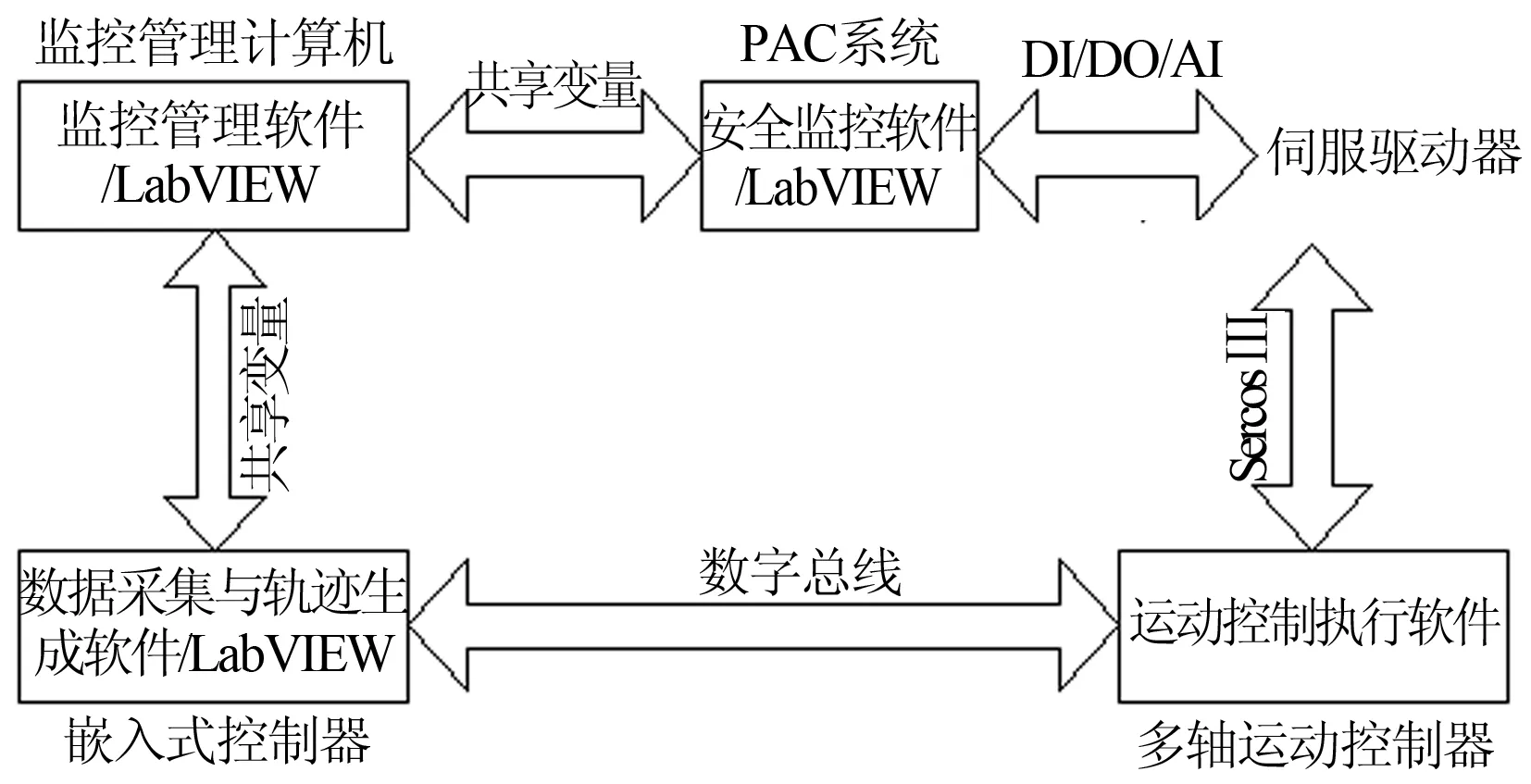
圖3 軟件總體結構Fig.3 Overall structure of software
3.1 系統實時性
為了確保整個測控系統的實時性,在嵌入式控制器中配置了RTOS(Real Time Operation System)實時操作系統、在嵌入式控制器和多軸運動控制器間配置了專門的高速通信的Profibus DP數字通訊總線。其中RTOS實時操作系統提供了高效的實時任務調度、中斷管理、系統資源和任務間的通訊等功能,實現了速度控制過程中任務間時序關系、運動時間的精確控制;Profibus DP總線的雙向數據通訊中,IndraWorks多軸運動控制器和NI嵌入式控制器之間的數據刷新周期達到2ms。
3.2α自由度的運動控制
在2m超CTS結構設計中,α、β2自由度采用了十字球鉸和推拉式的并聯結構,通過直線推桿的線位移來產生角度運動,但當β角運動以后,會引起α角的變化。圖4給出了不同β角下,α角與直線推桿位移的對應關系,可知β角變動后,同一推桿位移對應著不同的α角。為此,通過采用電子凸輪及虛擬主軸技術,實現了α、β解耦后的同步協調運動。
3.3 CTS試驗速度控制方法的實現
鑒于速度控制方法在節省能耗、提高試驗效率方面的效果極其明顯,但是由于外掛物模型的運動速度不能在試驗前確定,導致工程上比較成熟的控制策略難以直接運用到CTS系統中,為此,采用基于時空變換的雙閉環速度控制策略,如圖5所示,成功實現了CTS試驗的速度控制方法。外環建立軌跡精度誤差模型,實現求解運動方程時間步長的自適應,并根據CTS系統的運動能力和動態響應特性,通過時空變換動態產生最優的速度變換尺度;內環由多軸運動控制器、驅動器、電機和編碼器組成,精確控制六自由度裝置的運動速度。
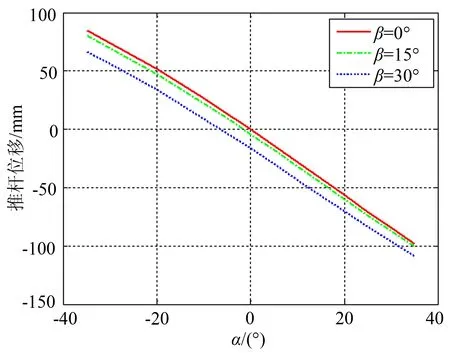
圖4 β角對α角的影響Fig.4 Influence of β angle on α angle
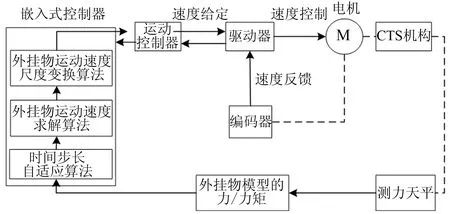
圖5 雙閉環速度控制策略Fig.5 Strategy of double closed-loop velocity control
4 調試結果
4.1 靜態調試
在CTS測控系統完成安全連鎖、緊急停車和驅動參數優化等調試工作后,使用美國API公司生產的T3-40激光跟蹤儀對6自由度裝置的靜態精度進行了測量,測量結果如表 1所示,可以看出6自由度裝置的靜態定位精度全部優于設計指標。
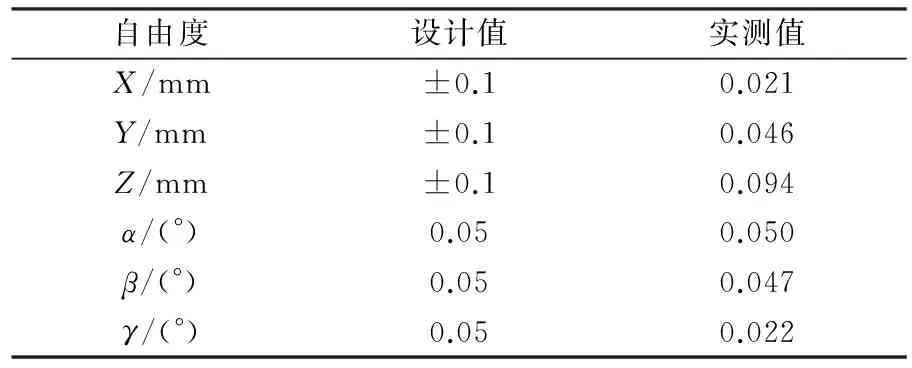
表1 六自由度裝置靜態定位精度Table 1 Accuracy of the six degree-of-freedom device
4.2 自由流調試試驗
為了檢驗CTS測量與6自由度運動控制系統的協調性和可靠性,開展了自由流試驗,即外掛物模型在沒有母機干擾的自由流場中的測力試驗,并將試驗結果與該外掛物在1.2m風洞得到的相同試驗條件下的試驗結果進行比較,對比曲線如圖6所示。可以看出,該外掛物的法向力系數、俯仰力矩系數重復性非常好,且與1.2m風洞的試驗結果規律一致,吻合較好。說明CTS測量系統與六自由度運動控制系統的協調性、可靠性和穩定性滿足試驗要求。
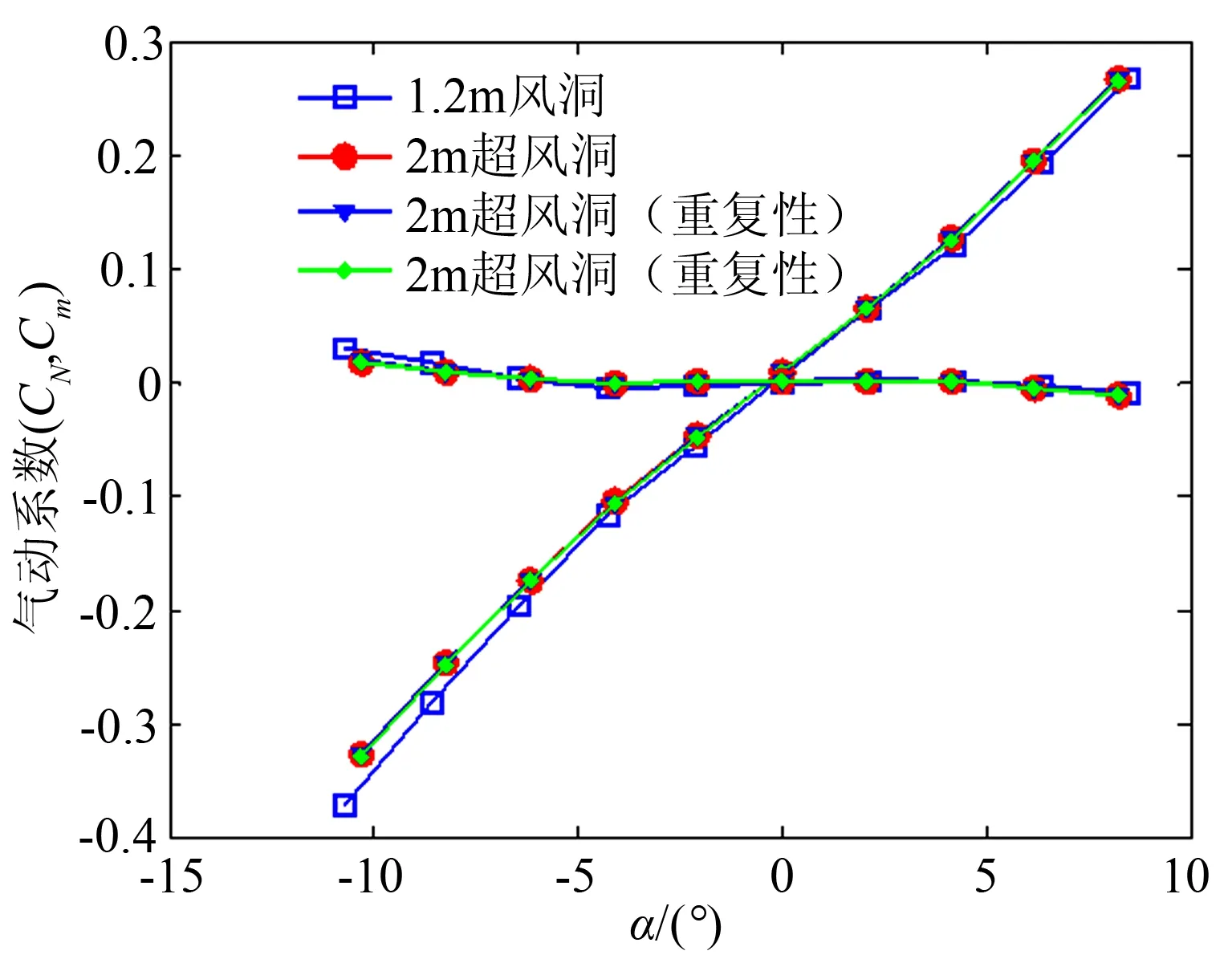
圖6 自由流試驗結果Fig.6 Free flow test results
4.3 軌跡調試試驗
為了檢驗運動方程求解算法和雙閉環速度控制方法的正確性,分別使用位置控制方法和速度控制方法進行CTS試驗,并與該外掛物在1.2m風洞采用位置控制方法獲得的相同馬赫數下的軌跡數據進行比較,結果如圖7所示。可以看出,所得軌跡變化規律一致、量值接近,僅滾轉角γ存在一定差異,這主要是由于該外掛物的滾轉力矩Mx測值太小、天平的Mx量程較大以及導彈轉動慣量較小等綜合因素所致;2m超CTS系統采用位置控制方式或速度控制方式所獲得分離軌跡同期重復性精度較高。另外,從CTS系統運行時間以及風洞吹風時間來看,速度控制方式比位置控制方式所用時間更短,更節能。并且從所獲得分離軌跡數據來看,速度控制方式所獲得的軌跡數據信息量更大,軌跡計算積分誤差相對減小,分離軌跡預測更加合理準確。這也說明本文研制的CTS測控系統為速度控制方法提供了性能優異的硬件構架,保證了系統的實時性和協調性。
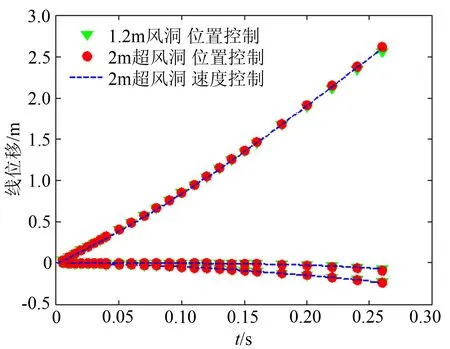
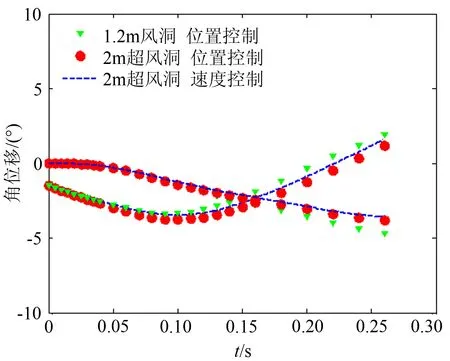
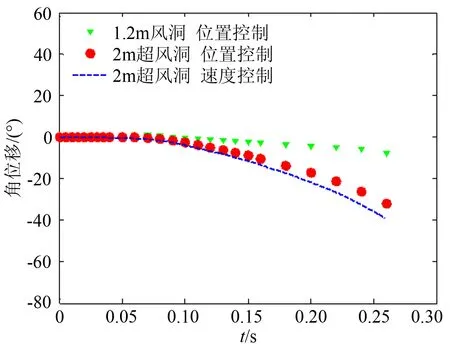
圖7 軌跡試驗結果Fig.7 Captive trajectory simulation test results
5 結 論
地面調試和風洞調試試驗結果表明,2m×2m超聲速風洞CTS測控系統性能穩定可靠,達到了預期研制目標,主要結論如下:
(1) 采用基于實時操作系統的嵌入式控制器和基于SercosIII總線的多軸運動控制器,保證了整個測控系統的高效實時、穩定可靠;為實現CTS試驗速度控制方法提供了性能優異的硬件構架;
(2) 配置的2級前置信號調理器增強了天平信號的抗干擾能力,提高了信噪比;
(3) 獨立的安全監控系統和完備的安全監控策略確保了試驗設備的運行安全;
(4) 由于采用集中控制的多層分步式結構設計,且設備的選購上盡可能使用成熟產品,使該系統具有任務均衡、可靠性高、運行穩定、易維護等優點,是一種具有推廣價值的CTS測控系統方案。
[1] 王發祥. 高速風洞試驗[M]. 北京: 國防工業出版社, 2003: 266-267.
Wang Faxiang. High speed wind tunnel test[M]. Beijing: National Defence Industry Press. 2003: 266-267.
[2] 李周復. 風洞特種試驗技術[M]. 北京: 航空工業出版社, 2010: 140-141.
Li Zhoufu. Special wind tunnel test technique[M]. Beijing: Aviation Industry Press, 2010: 140-141.
[3] 黃敘輝, 龐旭東, 宋斌. 1.2m跨超聲速風洞新型捕獲軌跡系統研制[J]. 實驗流體力學, 2008, 22(2): 95-98.
Huang Xuhui, Pang Xudong, Song Bin. Development of a new captive trajectory simulation system in the 1.2m transonic wind tunnel[J]. Journal of Experiments in Fluid Mechanics, 2008, 22(2): 95-98.
[4] 黃敘輝, 羅新福, 于志松. FL-24風洞新型捕獲軌跡系統設計與發展[J]. 空氣動力學學報, 2008, 26(2): 145-149.
Huang Xuhui, Luo Xinfu, Yu Zhisong. Design & development of a new captive trajectory simulation system in FL-24 wind tunnel[J]. Acta Aerodynamica Sinica, 2008, 26(2): 145-149.
[5] 祝汝松. 一個六自由度機構控制系統的實現[J]. 電子技術應用, 2000, 5: 37-39.
Zhu Rusong. Realization of control system for 6-DOF rig[J]. Application of Electronic Technique, 2000, 5: 37-39.
[6] 閻成, 鄧曉曼, 高峰, 等. 基于分步式測控技術的風洞運行狀態監測系統[J]. 兵工自動化, 2013, 32(2): 67-70.
Yan Cheng, Deng Xiaoman, Gao Feng, et al. Monitoring system for wind tunnel testing status based on distributed measurement and control technology[J]. Ordnance Industry Automation, 2013, 32(2): 67-70
[7] 楊帆, 樊丁, 彭凱, 等. 基于CAN總線的航空發動機試車臺實時測控系統設計[J]. 測控技術, 2013, 32(11): 72-75.
Yang Fan, Fan Ding, Peng Kai, et al. Design of real-time measurement and control system for aeroengine test rig based on CAN[J]. Measurement & Control Technology, 2013, 32(11): 72-75.
[8] 劉楓. 基于虛擬儀器的網絡化測控系統的研究[D]. 北京: 中國科學院研究生院, 2008.
Liu Feng.Research on networked measurement and control system based on virtual instrument[D]. Beijing: Graduate University of Chinese Academy of Sciences, 2008.
[9] 蒲鳳萍, 呂迪波. 基于LabVIEW的多任務測控系統設計與實現[J]. 電子測試, 2009, 8(8): 35-38.
Pu Fengping, Lyu Dibo. Design and realization of multi-task measurement and control system based on LabVIEW[J]. Electronic Test, 2009, 8(8): 35-38.
[10] 李洪珠. 基于LabVIEW遠程測控系統技術[J]. 國外電子測量技術, 2006, 25(1): 51-53.
Li Hongzhu.Technology of remote measurement and control system based on LabVIEW[J]. Foreign Electronic Measurement Technology, 2006, 25(1): 51-53.
[11] 馬妍妍. 基于SERCOSIII協議的開放式伺服控制系統設計與開發[J]. 工業控制計算機, 2013, 26(11): 40-44.
Ma Yanyan.Open structure servo control system′s based on SERCOS Ⅲ[J]. Industrial Control Computer, 2013, 26(11): 40-44.
[12] 賀繼林, 趙群飛, 楊汝清. 基于SERCOS的博弈機器人實時控制[J]. 機器人, 2003, 25(5): 390-393.
He Jilin, Zhao Qunfei, Yang Ruqing.Real-time control of chess-playing robot based on SERCOS[J]. Robot, 2003, 25(5): 390-393.
[13] Roy G Butler. Wind tunnel captive trajectory testing using continuous velocity control[C]//IAS, 1979, 253-255.
[14] 黃曉燕, 馮西安, 高天德. 基于CompactRIO的多通道陣列數據采集系統實現[J]. 測控技術, 2009, 28(12) : 17-19.
Huang Xiaoyan, Feng Xi’an, Gao Tiande. Implementation of data acquisition system for multi-channel array based on CompactRIO[J]. Measurement & Control Technology, 2009, 28(12) : 17-19.
[15] 田洪偉, 金海鷹. 基于PXI和LabVIEW技術實現的故障診斷系統[J]. 電子測量技術, 2012, 35(6): 125-128.
Tian Hongwei, Jin Haiying.Fault diagnosis system based on PXI and LabVIEW technology to realize[J]. Electronic Measurement Technology, 2012, 35(6): 125-128.
[16] 于志松, 王發祥, 羅新福. 兩種特殊CTS試驗技術的研究[J].
流體力學實驗與測量, 2004, 18(4): 49-53.
Yu Zhisong, Wang Faxiang, Luo Xinfu. Investigation of two special CTS test techniques[J]. Experiments and Measurements in Fluid Mechanics, 2004, 18(4): 49-53.
(編輯:楊 娟)
Development of measurement and control system for CTS in 2m×2m supersonic wind tunnel
Li Ping*, Huang Xuhui, Zhou Run, Zhang Zhengyu, Gao Rongzhao
(China Aerodynamics Research and Development Center, Mianyang Sichuan 621000, China)
In order to meet the requirement of Captive Trajectory Simulation tests in 2m-scale supersonic wind tunnel, the CTS facility and the corresponding measurement and control system are developed in the 2m×2m supersonic wind tunnel. In order to realize the closed-loop velocity control mode, a multi-layer distributed structure with a centralized control test technique is selected for the construction of the measurement and control system which must meet the high demands of real-time processing and information interaction tasks. The system consists of three subsystems, namely, the signal measurement and motion equation solver subsystem, the 6-DOF motion control subsystem , and the safety supervising subsystem. The softwares of monitoring and management, data acquisition and trajectory generation, and security monitoring are developed by LabVIEW. The motion control execution software is developed by IndraWorks. The information interaction among subsystems is implemented through TCP/IP, PSP and Profibus DP. The key technical problems such as shock resistance and velocity control are solved. Static accuracy of the 6-DOF rig is measured by T3-40 laser tracker which shows that the positioning accuracy of linear displacementX,YandZachieves 0.021mm, 0.046mm and 0.094mm respectively,the positioning accuracy of angular displacementα,βandγachieves 0.05°,0.047° and 0.022°, respectively. The accuracy is better than that of design index(±0.1mm,±0.1mm,±0.1mm,0.05°,0.05°,0.05°).The debugging and wind tunnel tests show that the system is stable, reliable, and easy to use and maintain; the test results are reasonable, and the data obtained are reliable.
supersonic wind tunnel;measurement and control system;6-DOF rig;velocity control
1672-9897(2015)04-0095-06
10.11729/syltlx20140082
2014-07-18;
2015-04-28
LiP,HuangXH,ZhouR,etal.DevelopmentofmeasurementandcontrolsystemforCTSin2m×2msupersonicwindtunnel.JournalofExperimentsinFluidMechanics, 2015, 29(4): 95-100. 李 平, 黃敘輝, 周 潤, 等. 2m×2m超聲速風洞CTS測控系統研制. 實驗流體力學, 2015, 29(4): 95-100.
V211.7
A

李 平(1968-),男,四川眉山人,高級工程師。研究方向:風洞測量、控制及數據處理研究。通信地址:四川省綿陽市中國空氣動力研究與發展中心(621000)。E-mail:LP_YL@163.com
*通信作者 E-mail: LP_YL@163.com
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
