靜電陀螺監控器幾種啟動模式比較及應用分析
2015-06-15 12:56:11周海淵倪文秀王前學
中國慣性技術學報 2015年4期
關鍵詞:設備
周海淵,倪文秀,潘 良,王前學
(1. 中國衛星海上測控部,江陰 214431;2. 天津航海儀器研究所,天津 300131)
靜電陀螺監控器幾種啟動模式比較及應用分析
周海淵1,倪文秀2,潘 良1,王前學1
(1. 中國衛星海上測控部,江陰 214431;2. 天津航海儀器研究所,天津 300131)
靜電陀螺監控器可以全天候提供連續高精度的位置及航向信息,其工作不受天氣制約。該設備有碼頭啟動和海上應急啟動兩種啟動模式,海上應急啟動根據載體所處的航行工況分為錨泊啟動、漂航啟動、等緯度航行啟動三種模式。該設備啟動流程較為復雜,分為陀螺對準、陀螺啟動、六次校準、系統標定、系統導航五個子過程,不同啟動模式對應的外界工況對各子過程的啟動細節存在一定影響,進而導致不同啟動模式設備導航精度存在一定差異。針對上述問題,通過分析設備結構和工作原理,結合測量船設備多次應用該設備的工作經驗,將靜電陀螺監控器幾種啟動模式對設備啟動子過程的影響進行了綜合比較分析,最后結合不同啟動模式設備的導航精度提出了對應的應用建議,為靜電陀螺監控器在不同狀態下的啟動和應用提供借鑒。
靜電陀螺監控器;啟動方式;六次校準;系統標定
靜電陀螺監控器(以下簡稱ESGM)作為校準設備,與慣性導航系統(INS)組合使用可以有效延長INS的重調周期,提高系統精度[1-5]。而ESGM的系統精度取決于解算通道所使用參數的估計準確度,而對這些參數的估計與陀螺對準、陀螺啟動、六次校準、系統標定等階段都有密切的關系。
ESGM安裝于測量船后工作超過1萬小時,期間對碼頭啟動、錨泊啟動、漂航啟動、等緯度航行啟動等各種啟動方式都進行了相關試驗。本文通過分析設備啟動過程的工作原理,結合實際應用所積累數據,將幾種啟動模式對設備精度的影響程度進行了綜合比較分析,最后提出了應用建議,為該設備在不同工況下的啟動和應用提供了有效的參考。
1 ESGM啟動關鍵過程
ESGM安裝有兩個靜電陀螺儀,模擬兩顆恒星。極陀螺動量矩H1的指向與地球極軸平行,赤道陀螺動量矩H2的指向與赤道面平行。ESGM通過復示平臺跟蹤當地水平面,陀螺儀動量矩軸在慣性空間內的指向,在地平坐標系內用高度角h和方位角q表示,在赤道坐標系內用赤緯δ及地方時角S*表示,其中h和q通過對陀螺儀方位環和高度環的測量得到,δ和S*通過測量通道計算得出。因此,啟動過程中陀螺儀動量矩軸的對準精度直接影響著設備的導航精度。ESGM啟動的過程可以分為陀螺對準、陀螺啟動、六次校準、系統標定、系統導航5個階段,以下針對不同工況條件對陀螺儀啟動的影響進行分析。
1.1 陀螺對準
由于靜電陀螺無法通過施加力矩的方式調整動量矩,因此在轉子轉動之前必須驅動h、q來使其幾何軸處于如公式(1)所示的理論指向[6]。

陀螺對準階段,利用對高度環和方位環的測量值解算得出him和qim,然后通過引入當地經緯度、INS航向及水平姿態信息,將公式(1)中的相關角度轉換成極陀螺、赤道陀螺的高度角h0i和方位角q0i。最后如公式(2)所示,通過調整測量通道與解算通道之間的誤差,將Δhi、Δqi逼近為零,使陀螺儀動量矩軸構建精確的慣性坐標系(i=1,2分別表示極陀螺、赤道陀螺)。
1.2 陀螺啟動
陀螺完成對準,需要通過加速使其旋轉以便建立慣性空間,該過程分為一次加速、阻尼定中、二次加速三個階段。一次加速為陀螺提供初始轉動動量矩,轉速約為20 Hz,阻尼定中使轉子動量矩軸與陀螺殼體的幾何對稱軸趨于一致,阻尼精度在10'左右。二次加速陀螺轉速達到300 Hz,最后采用鎖相環技術,控制其精度在±0.1 Hz,實現對陀螺轉子的穩速閉環控制。之后ESGM進入隨動狀態,慣性坐標系初步形成。
在陀螺整個加速過程中需要根據載體所處的航行工況實時對h、q不斷調整才能保證陀螺動量矩軸的精確指向,一般調整精度保持在5′以內,這也是陀螺儀啟動的難點和關鍵所在。
1.3 六次校準
六次校準[7]的作用在于利用已經預先裝訂的陀螺漂移參數、地球自轉角速度ωe及陀螺動量矩相對赤道坐標系的初始位置角(赤緯δi(0)、地方時角Si*(0)),迭代解算瞬時的赤緯δip(t)和地方時角Si*p(t)及格林威治時角Sip(t),如公式(3)所示,其中后兩項可以由預知參數計算。
陀螺初始位置角由對應時刻陀螺在水平坐標系中測量的hi′和qi′經過球面三角變換求得。陀螺動量矩在赤道坐標系的位置角δi和Si與其在水平坐標系中的位置角hi′和qi′之間的關系如公式(4)所示:
1.4 系統標定
六次校準結束后,進入48 h系統標定階段。該過程以經過三角變化后的δim(t)、Si*m(t)作為準確值,經過一系列修正、平滑代表了陀螺動量矩實際的瞬間指向。計算δip(t)、Si*p(t)過程中,地球自轉角速度ωe可以預知,初始位置信息、GPS實時位置信息是已知信息。因此標定過程的解算數據中僅包含了陀螺初始位置誤差信息以及陀螺漂移參數誤差Δm01、Δm02、Δn11、Δn12、Δn22。
測量通道和解算通道誤差如公式(5)所示。在整個標定過程中,使用測量通道結果經過卡爾曼濾波迭代解算Δδi(t)、ΔSi*(t)中反映的初始位置誤差Δδi(0)、ΔSi*(0)以及相關陀螺漂移Δm01、Δm02、Δn11、Δn12、Δn22。

標定過程的唯一可觀測量稱為Z矢量,該矢量是Δδi(t)、ΔSi(t)的線性組合,反映了Δδi(t)、ΔSi(t)的變化情況,如公式(6)所示:
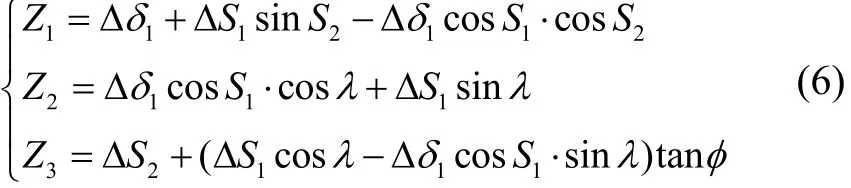
式中,Z1、Z2、Z3有著明顯的幾何意義:Z1是極陀螺和赤道陀螺H軸之間的夾角計算誤差,Z2是極陀螺H軸在當地子午面上的位置角計算誤差,Z3是赤道陀螺H軸在赤道面上的位置角計算誤差。
1.5 系統導航
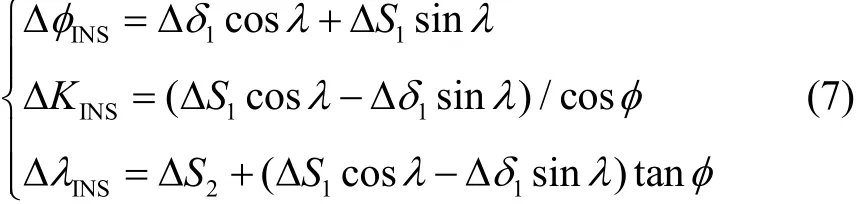
標定結束后系統轉入導航階段,此時解算通道各參數已經相當精確。由于ESGM工作是建立在INS基礎之上,此時的測量通道結果包括了INS的航向和位置誤差信息,如公式(7)所示可以使用Δδi(t)、ΔSi(t)來修正INS誤差,完成監控功能。
2 啟動方式對啟動過程的影響
在陀螺對準和啟動階段,通過對hi和qi持續調整才能保證六次校準和系統標定過程中對于陀螺漂移參數和陀螺初始位置的計算精度。在ESGM中位置信息與陀螺H軸之間存在公式(8)所示的關系:

從公式(8)可以看出,極陀螺H軸的高度角h1、方位角q1有著明顯的幾何意義,緯度φ變化量對應極陀螺高度角變化量,航向K變化量對應方位角變化量。由于在不同的航行工況下緯度和航向變化情況不同,因而導致ESGM在不同航行工況下的啟動過程中測量通道需要調整的復雜程度也不一樣。
2.1 碼頭啟動
在碼頭條件下,船舶航向、位置信息為固定值,當陀螺完成對準后,測量通道h1、q1、h2、q2四個參數幾乎不受影響,直至完成陀螺加速,期間不需要重新調整陀螺動量矩方向,因此兩個陀螺可以同時啟動。雖然碼頭啟動操作簡單且設備精度較高,但是受到嚴重的應用限制。
2.2 錨泊啟動
錨泊一般是在近海錨地,由于載體一端被錨鏈固定于海底,在近海洋流作用下其航向變化十分頻繁[8],如圖1所示,在1 h內航向變化范圍為150°~350°。
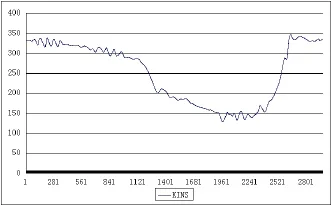
圖1 錨泊情況下載體航向Fig.1 Carrier heading under mooring condition
如圖2所示,航向變化率最快達到2.7 (°)/s,從航向變化速率可以發現,錨泊狀態的航向變化沒有固定的規律。
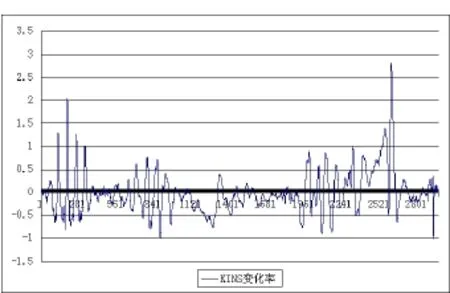
圖2 錨泊情況下載體航向變化率Fig.2 Changing rate of carrier heading under mooring condition
當陀螺完成對準后,航向變化導致q1、q2變化較大需要實時調整,而實際操作中h1、h2雖然變化不大,但是也需要一定的調整。因此綜合以上因素考慮,無法確保兩個陀螺同時啟動的精度,實際使用中一般采用兩個陀螺分時啟動。
另外,在這種狀態下,INS的航向和位置數據發散嚴重,而ESGM工作需要INS的位置、航向信息作為支撐。上述情況在一定程度上影響到ESGM慣性坐標系精度和后續導航參數的標定精確度。
2.3 漂航啟動
漂航一般是在遠海海況較好的情況下進行,此時遠海洋流流向和流速較為穩定,漂航狀態下載體艏艉方向垂直于洋流方向并隨洋流移動,載體的航向和位置都不固定但是變化都比較小。如圖3所示,由于浪涌、洋流沖擊,載體在航向在267°附近變化,但是航向變化不超過1°。

圖3 漂航情況下載體航向Fig.3 Carrier heading under drift condition
當陀螺完成對準后,h1、q1、h2、q2四個參數中,都需要視情調整,但是調整幅度較小,調整的頻率也不高。這種情況下兩個陀螺可以同時啟動也可分時啟動,當然分時啟動的難度更小一些。漂航條件下支撐ESGM工作的INS數據精度也能得到保障,再者載體沒有動力消耗,因此這種方式是ESGM啟動的較為靈活且經濟實用的方式。
2.4 等緯度啟動
等緯度航行啟動是ESGM目前較為標準的海上應急啟動方式,從陀螺對準、陀螺啟動至完成六次校準,載體提供6 h等緯度航行。如圖4所示,這種情況下載體的航向較為穩定,在90°附近,變化不超過±1°。
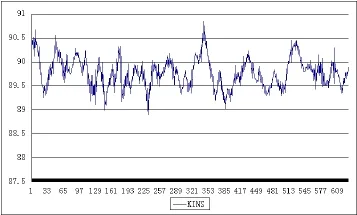
圖4 等緯度情況下載體航向Fig.4 Carrier heading under equal-latitude condition
當陀螺完成對準后,q1、q2有較為明顯變化,視情調整即可。根據實際工作經驗,h1、h2變化不大幾乎不用調整,兩個陀螺可以分時啟動也可以同時啟動。
等緯度航行雖然存在諸多優點,但是也存在一定局限,首先要求載體改變航行計劃,其次如果在漂航狀態測量船航行那么會徒增燃料消耗。
3 啟動方式對設備精度的影響
反應ESGM精度的有三個量,一是Z矢量,二是陀螺漂移參數,三是航向精度。下面從上述三個方面對各種啟動方式的設備工作情況進行分析。
3.1 啟動方式對Z矢量影響
圖5是四中啟動方式的Z矢量曲線。在碼頭和錨泊狀態下,載體靜止Z曲線是比較平滑的,以24 h為周期變化的三角函數曲線,碼頭Z曲線峰峰值為3,錨泊Z曲線峰峰值為10,這是由于碼頭載體水平姿態變化比錨泊狀態小;在漂航和等緯度航行下,Z曲線依然存在24 h為周期變化的三角函數關系,但是曲線不平滑,規律不明顯,這是由于載體運動和姿態變化較大的結果。比較分析不難發現,載體所處的外界環境越好,標定Z矢量誤差越小,因此設備啟動應該選擇良好的外界環境。
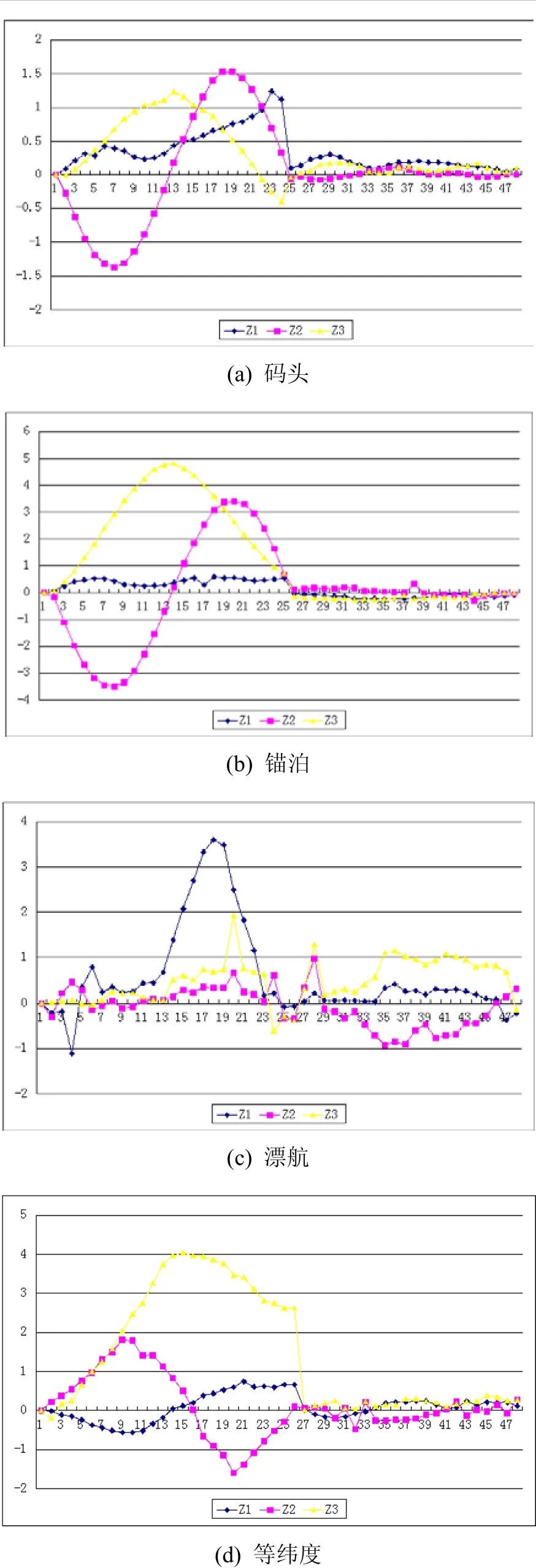
圖5 不同啟動方式Z矢量曲線Fig.5 Z vector curves in different start-up modes
3.2 啟動方式對陀螺漂移參數影響
ESGM設備有五個可觀測的陀螺漂移參數,分別是m01、m02、n11、n12、n22,其中m02在設備導航后每24 h更新一次,其余參數則不再變化。表1為四種啟動模式下的陀螺漂移系數。在設備進入導航狀態后各參數屬于同一數量級,沒有明顯的區別。
由于參數m02的特殊性,該參數直接反應了設備的精度和工作情況。在ESGM中,對m02設置了理論門限(絕對值小于0.484 810×10-7)。表2對ESGM四種啟動模式中的m02進行了統計,可以看出,錨泊啟動時m02發散較快,導航72 h該數據接近理論門限,導航240 h該數據遠超理論門限。
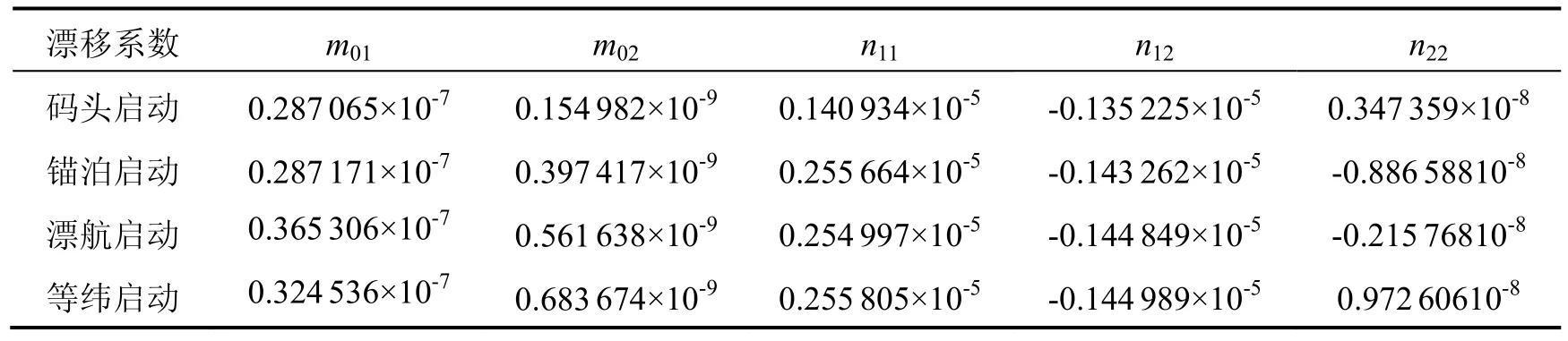
表1 ESGM陀螺漂移參數比對表Tab.1 Comparison on drift parameters of ESGM gyroscope in different start-up modes
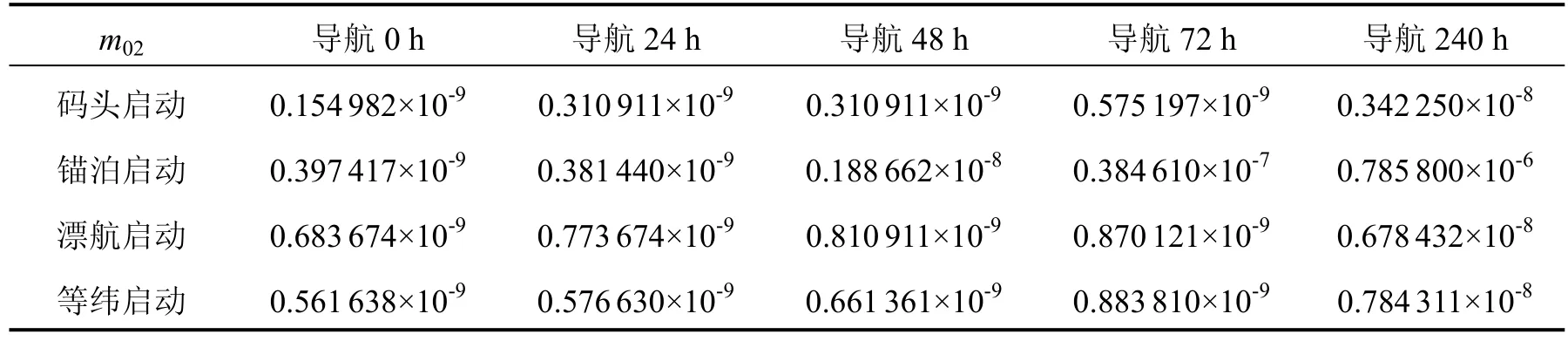
表2 ESGM陀螺漂移參數m02變化情況比對表Tab.2 Comparison on drift parameter m02of ESGM gyroscope in different start-up modes
3.3 啟動方式對航向精度影響
ESGM航向誤差如表3所示,可以看出,碼頭、漂航和等緯度三種啟動方式下基本一致,而錨泊啟動的72 h和240 h航向誤差都較大,同時也說明了ESGM航向誤差的變化情況與m02變化情況完全一致。
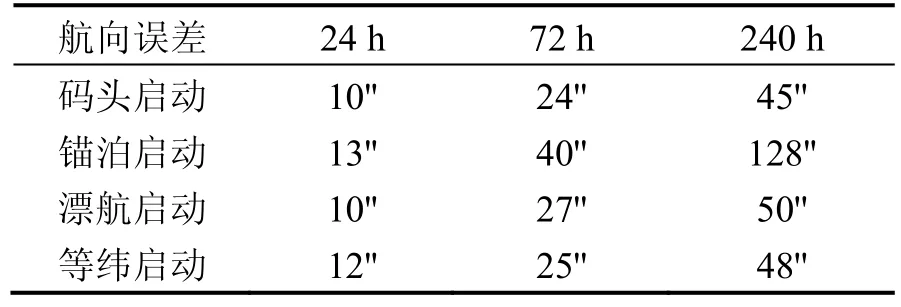
表3 ESGM航向精度比對表Tab.3 Comparison on ESGM heading precisions in different start-up modes
4 啟動方式特點歸納與應用建議
綜合前面分析,可以用表4來說明各種啟動方式的特點。
鑒于表4及前面分析結果,在四種啟動模式中,提出以下應用建議:
① 在有條件和工作性質允許的情況下,盡可能使用碼頭啟動方式,無論從啟動難易程度還是航向精度考慮,這種方式都是首選。但是需要出航前完成ESGM啟動,同時必須考慮到長時間工作后數據的發散,再者加以碼頭條件的限制,該方式精度雖高但是應用顯得不夠靈活。
② 如果載體長時間海上工作,建議采用海上等緯度航行或者漂航啟動,這兩種方式難易程度和航向精度相當,同時也能滿足指標要求。具體采用哪種方式,可以結合載體的航行計劃以及節能減排綜合考慮定奪,這兩種方式應用較為靈活。
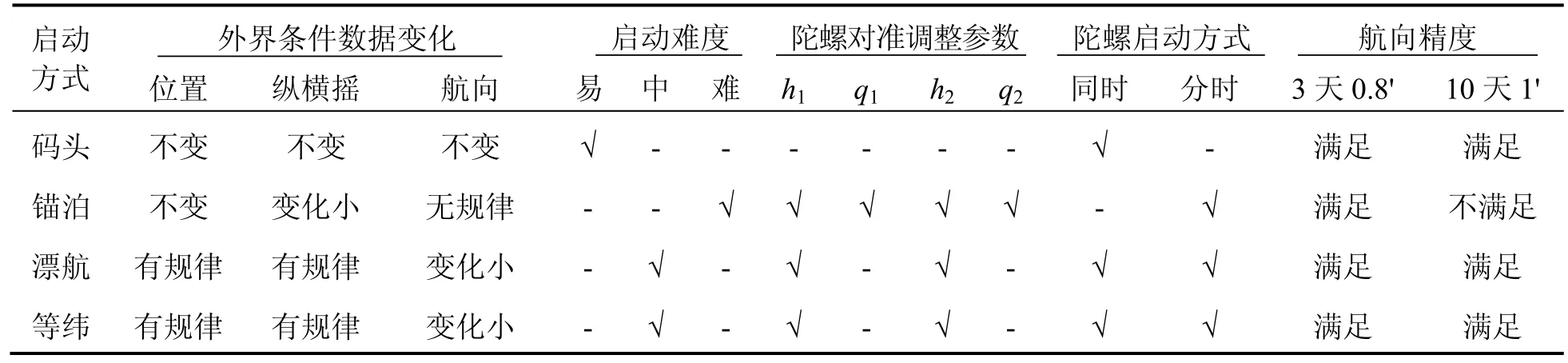
表4 ESGM啟動方式分析結果匯總表Tab.4 Summary on analysis results of ESGM start-up modes
③ 錨泊啟動方式雖然也能夠完成設備啟動,但在此不推薦采用,這是由于航向變化較快而且規律較難把握,啟動難度較大。在實際應用中又由于航向頻繁變化,導致INS設備航向誤差、位置誤差較大,進而會影響ESGM設備的啟動精度,長時間工作下航向精度難以保障。
5 結 論
ESGM有著多種的啟動方式,不同啟動方式對啟動流程的難易程度有著不同的約束,對設備的導航精度也有不同程度的影響。本文從設備工作原理入手,分析了設備啟動方式對啟動過程和設備精度的影響,總結了各種啟動方式的特點,提煉出了具體可行的ESGM啟動方式應用建議。本文研究成果是對ESGM幾十次次啟動和近萬小時應用的經驗總結,對于設備的應用具有較強的實用價值。
(References):
[1] 馮鴻奎, 李曉勇, 薛國虎, 等. 航天測量船導航系統ESGM技術[J]. 飛行器測控學報, 2010, 29(1): 28-33. Feng Hong-kui, Li Xiao-yong, Xue Guo-hu, et al. Application of ESGM technique on space instrumentation ships[J]. Journal of Spacecraft TT&C Technology, 2010, 29(1): 28-33.
[2] Christensen W. Advanced development of ESG strap -down navigation system[J]. IEEE Transactions on Aerospace and Electronic Systems, 1996, 2(2): 143-157.
[3] Zhang Ke-zhi, Tian Wei-feng, Qian Feng. Combination of distributed Kalman filter and BP neural network for ESG bias model identification[J]. Transactions of Nanjing University of Aeronautics & Astronautics, 2010, 27(3): 226-231.
[4] Yang Gong-liu. Study on simulation techniques for marine integrated navigation system[C]//Second International Symposium on Inertial Technology in Beijing. Beijing, 1998.
[5] Hill D A, Letendre T, Mills H A. Embedded real-time DSP control of an electrostatically gyroscope[C]//Proceeding of the American Control Conference. Boston, 2004.
[6] 王前學, 倪文秀, 劉巍, 等. 靜電陀螺監控器海上赤道陀螺儀低緯度下的隨動性能[J]. 中國慣性技術學報, 2010, 18(1): 90-92. Wang Qian-xue, Ni Wen-xiu, Liu Wei, et al. Servo performance of ESGM’s equatorial gyroscope in low-latitude regions[J]. Journal of Chinese Inertial Technology, 2010, 18(1): 90-92.
[7] 劉新民, 孫學成, 周琳琦, 等. 靜電陀螺監控器海上“六次校”方法[J]. 中國慣性技術學報, 2011, 19(4): 309-402. Liu Xin-ming, Sun Xue-cheng, Zhou Lin-qi, et al. Method of electrostatic gyroscope monitor’s maritime six-times calibration[J]. Journal of Chinese Inertial Technology, 2011, 19(4): 309-402.
[8] 石敬, 李澤, 宋健力, 等. 靜電陀螺監控器錨泊啟動方法.[J]. 中國慣性技術學報, 2013, 21(2): 174-177. Shi Jing, Li Ze, Song Jian-li, et al. Experiment on marine anchoring start of electrostatic gyro monitor[J]. Journal of Chinese Inertial Technology, 2013, 21(2): 174-177.
Comparison and application analysis on several ESGM starting modes
ZHOU Hai-yuan1, NI Wen-xiu2, PAN Liang1, WANG Qian-xue1
(1. China Satellite Maritime Tracking & Controlling Department, Jiangyin 214431, China; 2. Tianjin Navigation Instrument Research Institute, Tianjin 300131, China)
Electrostatic gyro monitor can continuously provide all-weather high-precision position and heading information. ESGM has two start-up modes, i.e. dock static start-up and maritime emergency start-up. According to the carrier’s navigation condition, the maritime emergency start-up is divided into mooring start-up, drift start-up, same latitude sailing start-up. The boot process is rather complicated and can be divided into gyro starting alignment, gyro start-up, six calibration, system calibration, system navigation. The external working conditions in different start-up modes would have different impacts on the details of each starting process and hence the equipment’s navigation precisions. In view of the above situation, the ESGM’s structure and working principle is analyzed combining with the working experience of TT&C ship, and a comprehensive comparative analysis among the several ESGM starting modes is studied. Finally an application suggestion is proposed, and it can provide effective application reference for ESGM in different states of the start-up.
electrostatic gyro monitor; start-up; six calibration; calibration system
U666.1
A
1005-6734(2015)04-0467-05
10.13695/j.cnki.12-1222/o3.2015.04.009
2015-03-26;
2015-07-09
周海淵(1982—),男,工程師,從事慣性導航設備應用研究。E-mail:lynn9527@gmail.com
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
當代工人(2020年13期)2020-09-27 23:04:20
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年10期)2018-08-04 03:24:48
家庭影院技術(2017年11期)2017-12-20 08:10:57
工業設計(2016年12期)2016-04-16 02:52:00
IT時代周刊(2015年8期)2015-11-11 05:50:37
汽車維修與保養(2015年1期)2015-04-17 03:25:28
設備管理與維修(2015年12期)2015-04-09 06:57:00