四旋翼無人機設計與滑模控制仿真
2015-08-14 21:19:49尤元李聞先
現代電子技術 2015年15期
尤元+李聞先

摘 要: 隨著近些年自然災害的頻繁發生,四旋翼飛行器搜救設備得到越來越廣泛的應用。首先介紹四旋翼飛行系統的總體設計架構,然后針對地面坐標系與集體坐標系建立了四軸飛行器的動態模型,同時為得到良好的響應速度、控制穩定度與魯棒性,應用滑模變結構控制理論設計了飛行器的控制算法。最后通過仿真數據對相同條件下的PID控制器與該控制器對比,證明該控制器的強魯棒性和控制穩定性滿足項目任務需求。
關鍵詞: 四旋翼飛行器; 滑模變結構控制; PID控制; 建模仿真
中圖分類號: TN964?34; V249.1 文獻標識碼: A 文章編號: 1004?373X(2015)15?0080?04
Design of quadrotor UAV and its sliding mode control simulation
YOU Yuan1, LI Wenxian2
(1. Changchun University of Technology, Changchun 130012, China;
2. Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, Changchun 130033, China)
Abstract: With the frequent occurrence of natural disasters in recent years, quadrotor UAV search and rescue equipments have been applied widely. The overall design framework of quadrotor aircraft system is introduced. The dynamic model of quadrotor aircraft was established for ground coordinate system and global coordinate system. To obtain fast response speed, and control stability and robustness, sliding mode variable control is used to design aircraft control algorithm. Simulation data are compared between PID controller and the proposed controller, it demonstrates that the strong robustness and control stability of sliding mode variable controller can meet project′s mission requirements.
Keywords: quadrotor aircraft; sliding mode variable control; PID control; modeling simulation
0 引 言
四旋翼飛行器是有四個旋翼呈剛性十字結構的一種飛行裝置,它通過控制四個旋翼的速度來實現垂直起降、自主懸停以及姿態控制等動作。因其具有適應復雜環境的能力、可低速飛行、機體結構簡單、制造成本低等優點,可廣泛應用于軍事偵察、自然災害搜救遙感、高空拍攝等軍用與民用領域。隨著新型材料的應用、微處理器技術的進步、傳感器工藝的提高,電池續航能力的提升以及動力裝置的改善,四旋翼無人機成了近幾年來國內外研究的焦點[1]。
四旋翼飛行器是一個非線性、強耦合、欠驅動、時變的被控對象,其獨特的結構布局和飛行控制的干擾敏感特性使其控制系統的設計變得較為復雜[2]。近些年國內外學者對該飛行器的控制模型做了大量的研究工作,文獻[3] 將控制系統分為幾個獨立的通道,分別設計相應的PID 控制器進行姿態與懸停控制,文獻[4]采用反步法,通過構造合適的Lyapunov函數求出控制律進行姿態與位置控制,得到了良好的跟蹤性與快速的調整時間。
本文采用滑模變結構控制理論推導了四旋翼無人機動力學模型的控制律,通過Matlab/Simulink對無人機動力模型的PID控制器與滑模控制器進行仿真對比,對比結果表明,本文設計的控制器具有響應速度快、控制過程平穩、無超調與震蕩及強魯棒性等優點。
1 四旋翼飛行器動力模型建立
四旋翼飛行器可視為具有十字交叉固定結構并具有4個獨立電機驅動螺旋槳的剛性系統,飛行器的運動完全由4個電機的轉速控制,如圖1所示。四旋翼飛行器的動力模型輸入為4個螺旋槳的轉速,輸出為飛行器的位置(x,y,z)與飛行器的姿態角([?,][θ,][ψ]),由于其獨立控制變量個數小于系統自由度個數,因此該系統為欠驅動系統、動力不穩定系統。
四旋翼飛行器的簡化結構如圖1所示,飛行器被視為一個剛體,現做如下假設:
(1) 地面為平坦的且靜止不動的近似慣性參考系;
(2) 重力加速度[g]為常數且方向向下垂直于地面;
(3) 大氣相對于地球為靜止的,且空氣密度不隨高度改變。
圖1 四旋翼飛行器簡化模型
那么根據牛頓第二定律有:
[mI00JVBωB+ωB×mVBωB×JωB=FBTB] (2)
式中:[FB]表示機體受力,[FB∈R3;][TB]為機體轉動力矩,[TB∈R3;][VB]表示機體的線速度,[VB∈R3;][ωB]表示機體角速度,[ωB∈R3;][J]表示機體的轉動慣性矩陣,[J∈R3;][I]表示單位矩陣,[I∈R3]。
由公式(2)可推導得出飛行器的力學方程[5]:
[u=1m(mgsinθ-kd1x)+ψv-θwv=1m(-mgsin?cosθ-kd2y)+?w-ψuw=1m[F1+F2+F3+F4-(mgcos?cosθ-kd3z)]+θu-?v] (3)
式中:[u,][v,][w]分別表示沿機體坐標系[x,][y,][z]軸的機體速度;[kd1,][kd2,][kd3]分別為機體坐標系中沿著[x,][y,][z]軸運動的阻力系數。通過地面坐標系與機體坐標系的坐標轉換可得飛行器導航運動方程[5]:
[x=F1+F2+F3+F4m(cosψsinθcos?+sinψsin?)-kd1xmy=F1+F2+F3+F4m(sinψsinθcos?-cosψsin?)-kd2ymz=F1+F2+F3+F4mcosθcos?-kd3zm-g] (4)
式中:[F1,][F2,][F3,][F4]分別代表四個旋翼的升力。
由于每個旋翼的轉動慣量相對于轉動力矩來說非常小,所以本文忽略了四個旋翼的陀螺力矩,根據角動量定理有:
[dHBdtE=?HB?tB+ωB×HB=TB][HB=JωB=Jxx-Jxx-Jxx-JxyJxx-Jxx-Jxx-JxxJxxpqr] (5)
式中:[HB]代表四旋翼飛行器角動量;[TB]代表作用于飛行器質心的凈力矩,定義[TB=u2u3u4],其中[u2,][u3,][u4]分別代表飛行器以機體坐標系中[x,][y,][z]軸的旋轉力矩,[u1]代表四個螺旋槳升力之和,[u1=FT;][p,][q,][r]分別為機體坐標系中每個軸的角速度。
假設俯仰與橫滾的角度非常小,那么歐拉角速度可簡化為([?,][θ,][ψ])T=([p,][q,][r])T,通過公式(5)可推導出飛行器的扭矩方程為:
[?=1Jx(F3-F2)l-kd4?-θψ(Jz-Jy)θ=1Jx(F1-F4)l-kd5θ-?ψ(Jx-Jz)ψ=1Jx(F1-F3+F4-F2)l-kd6ψ-θ?(Jy-Jx)] (6)
2 四旋翼飛行器滑模變結構控制設計
滑模變結構控制系統的設計,一般可以分為兩個部分,第一個部分是按照某種期望的動態特性來設計切換函數(切換面),設計的切換函數使得開關面有某些優良的品質,從而使系統的狀態點可以快速穩定地從滑模面外進入滑模面;而第二部分是設計能在切換面附近產生滑動模態的控制輸入。
首先根據飛行器的動力模型可得控制系統的狀態方程:
[X=x2u1m(cosx7sinx9cosx11+sinx7sinx11)x4u1m(cosx7sinx9sinx11-sinx7cosx11)x5u1mcosx7cosx9-gx8(Jy-Jz)x10x12+u2Jxx10(Jz-Jx)x8x12+u3Jyx12(Jx-Jy)x10x12+u4Jz] (7)
式中:[X=[x,x,y,y,z,z,?,?,θ,θ,ψ,ψ]T=[x1,x2,…,x12]T;][Jx,][Jy,][Jz]分別為四旋翼無人機在[x,][y,][z]軸的轉動慣量。
公式(8)定義誤差變量[zi,]然后選取李雅普諾夫函數[Vi:]
[zi=xid-xi, i∈1,3,5,7,9,11xi-x(i-1)d-αzi-1, i∈2,4,6,8,10,12]
[Vi=12zi2, i=1,3,5,7,9,1112(2Vi-1+zi2), i=2,4,6,8,10,12] (8)
選取滑模切換面[S:]
[Sx=z2=x2-x1d-αz1Sy=z4=x4-x3d-αz3Sz=z6=x6-x5d-αz5S?=z8=x8-x7d-αz7Sθ=z10=x10-x9d-αz9Sψ=z12=x12-x11d-αz11] (9)
那么根據李雅普諾夫到達條件,同時按照指數趨近律的控制方法可以推導得出四旋翼飛行器的控制方程為:
[u1=mcosx7cosx9-εsgn(Sz)-kSz+zd+α(zd-z)+gu2=Jx-εsgn(S?)-kS?+?d+α(?d-?)-Jy-JzJxx10x12u3=Jy-εsgn(Sθ)-kSθ+θd+α(θd-θ)-Jz-JxJyx8x12u4=Jz-εsgn(Sψ)-kSψ+ψd+α(ψd-ψ)-Jx-JyJzx8x10] (10)
3 滑模控制的Matlab/Simulink實現與仿真分析
3.1 滑模控制系統Simulink設計
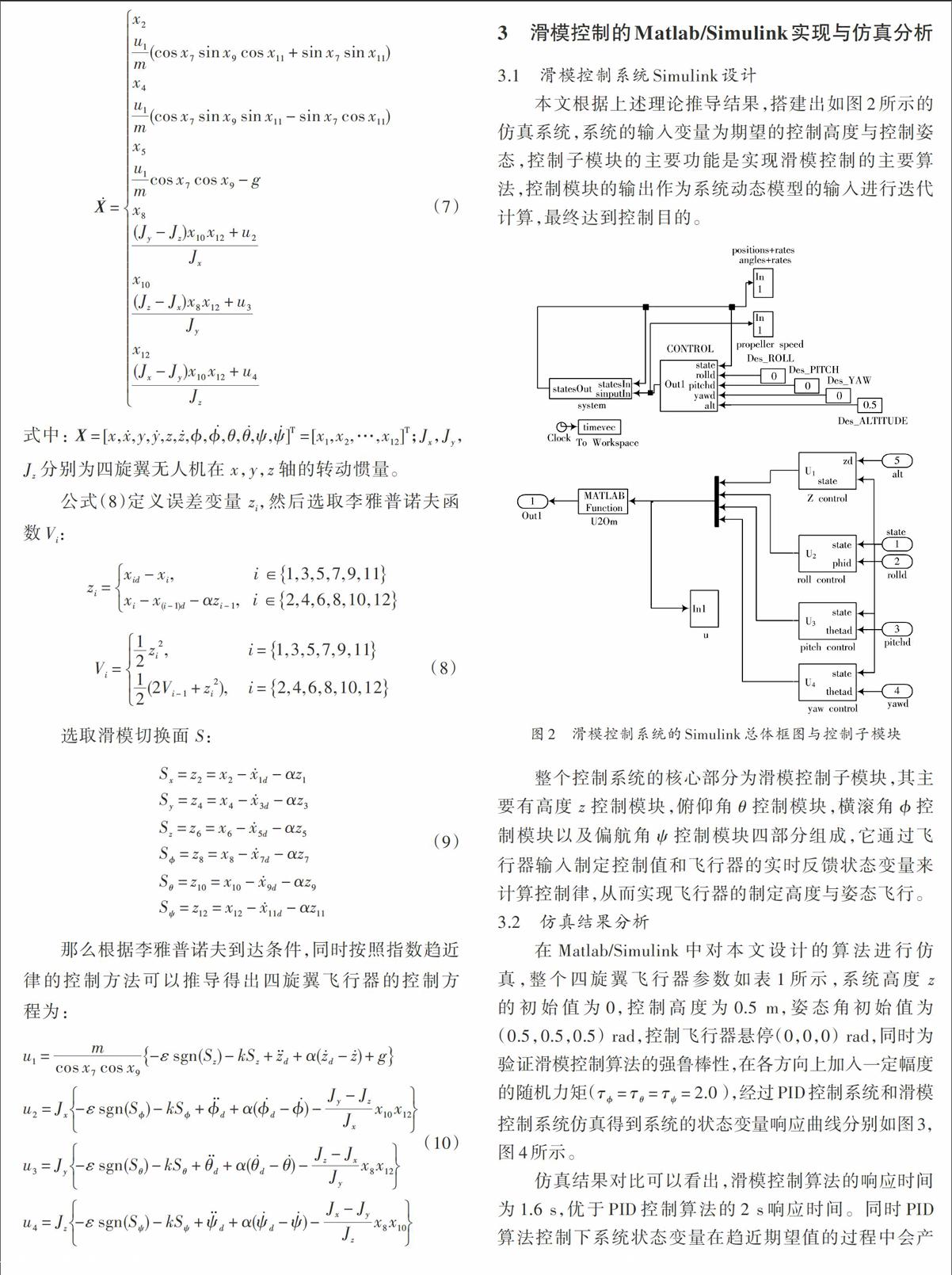
本文根據上述理論推導結果,搭建出如圖2所示的仿真系統,系統的輸入變量為期望的控制高度與控制姿態,控制子模塊的主要功能是實現滑模控制的主要算法,控制模塊的輸出作為系統動態模型的輸入進行迭代計算,最終達到控制目的。
圖2 滑模控制系統的Simulink總體框圖與控制子模塊
整個控制系統的核心部分為滑模控制子模塊,其主要有高度[z]控制模塊,俯仰角[θ]控制模塊,橫滾角[?]控制模塊以及偏航角[ψ]控制模塊四部分組成,它通過飛行器輸入制定控制值和飛行器的實時反饋狀態變量來計算控制律,從而實現飛行器的制定高度與姿態飛行。
3.2 仿真結果分析
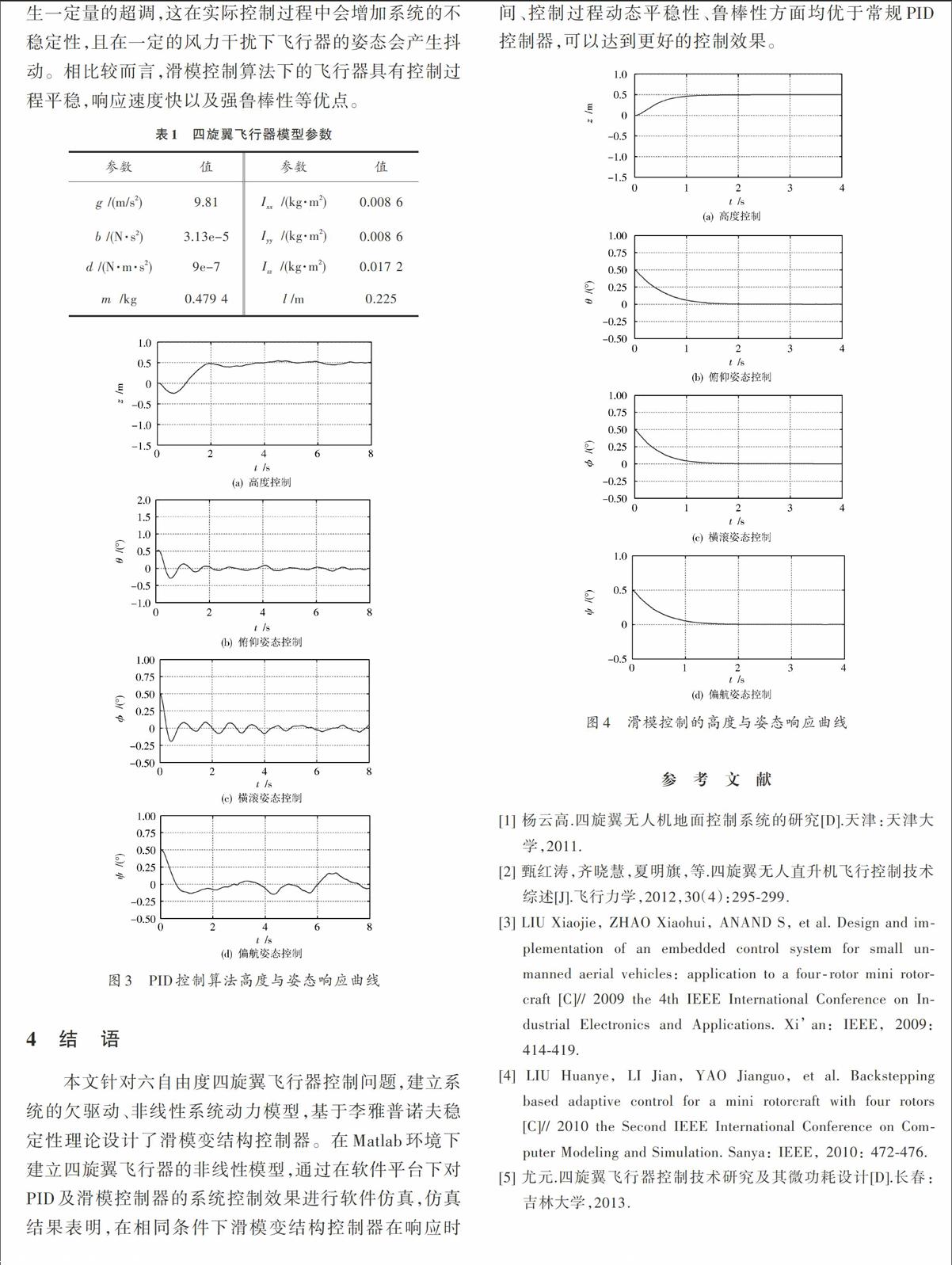
在Matlab/Simulink中對本文設計的算法進行仿真,整個四旋翼飛行器參數如表1所示,系統高度[z]的初始值為0,控制高度為0.5 m,姿態角初始值為(0.5,0.5,0.5) rad,控制飛行器懸停(0,0,0) rad,同時為驗證滑模控制算法的強魯棒性,在各方向上加入一定幅度的隨機力矩([τ?=τθ=τψ=2.0]),經過PID控制系統和滑模控制系統仿真得到系統的狀態變量響應曲線分別如圖3,圖4所示。
仿真結果對比可以看出,滑模控制算法的響應時間為1.6 s,優于PID控制算法的2 s響應時間。同時PID算法控制下系統狀態變量在趨近期望值的過程中會產生一定量的超調,這在實際控制過程中會增加系統的不穩定性,且在一定的風力干擾下飛行器的姿態會產生抖動。相比較而言,滑模控制算法下的飛行器具有控制過程平穩,響應速度快以及強魯棒性等優點。
表1 四旋翼飛行器模型參數
[參數\&值\&參數\&值\&g /(m/s2)\&9.81\&[Ixx] /(kg·m2)\&0.008 6\&b /(N·s2)\&3.13e-5\&[Iyy] /(kg·m2)\&0.008 6\&d /(N·m·s2)\&9e-7\&[Izz] /(kg·m2)\&0.017 2\&[m] /kg\&0.479 4\&[l]/m\&0.225\&]
圖3 PID控制算法高度與姿態響應曲線
4 結 語
本文針對六自由度四旋翼飛行器控制問題,建立系統的欠驅動、非線性系統動力模型,基于李雅普諾夫穩定性理論設計了滑模變結構控制器。在Matlab環境下建立四旋翼飛行器的非線性模型,通過在軟件平臺下對PID及滑模控制器的系統控制效果進行軟件仿真,仿真結果表明,在相同條件下滑模變結構控制器在響應時間、控制過程動態平穩性、魯棒性方面均優于常規PID控制器,可以達到更好的控制效果。
圖4 滑模控制的高度與姿態響應曲線
參考文獻
[1] 楊云高.四旋翼無人機地面控制系統的研究[D].天津:天津大學,2011.
[2] 甄紅濤,齊曉慧,夏明旗,等.四旋翼無人直升機飛行控制技術綜述[J].飛行力學,2012,30(4):295?299.
[3] LIU Xiaojie, ZHAO Xiaohui, ANAND S, et al. Design and implementation of an embedded control system for small unmanned aerial vehicles: application to a four?rotor mini rotorcraft [C]// 2009 the 4th IEEE International Conference on Industrial Electronics and Applications. Xian: IEEE, 2009: 414?419.
[4] LIU Huanye, LI Jian, YAO Jianguo, et al. Backstepping based adaptive control for a mini rotorcraft with four rotors [C]// 2010 the Second IEEE International Conference on Computer Modeling and Simulation. Sanya: IEEE, 2010: 472?476.
[5] 尤元.四旋翼飛行器控制技術研究及其微功耗設計[D].長春:吉林大學,2013.
[6] SOUMELIDIS A, GASPAR P, REGULA G, et al. Control of an experimental mini quad?rotor UAV [C]// 2008 the 16th Mediterranean Conference on Control and Automation. Ajaccio: IEEE, 2008: 1252?1257.
[7] BOUADI H, BOUCHOUCHA M, TADJINE M. Sliding mode control based on backstepping approach for an UAV quad rotor [J]. International Journal of Applied Mathematics & Computer Sciences, 2008, 4(1): 12?17.
[8] WU Yiting. Development and implementation of a control system for a quad?rotor UAV [D]. Weingarten: University of Applied Science Ravensburg Weingarten, 2009.
[9] RAZA S A. Design and control of a quadrotor unmanned aerial vehicle [D]. Ottawa: University of Ottawa, 2010.
[10] 孟佳東,趙志剛.小型四旋翼無人機建模與控制仿真[J].蘭州交通大學學報,2013,32(1):63?67.
[11] 聶博文,馬宏緒,王劍,等.微小型四旋翼飛行器的研究現狀與關鍵技術[J].電光與控制,2007,14(6):113?117.
