采用嵌入式處理器與可編程邏輯陣列的分布式圓機(jī)控制系統(tǒng)設(shè)計(jì)
2015-06-09 20:49:07王起文
紡織學(xué)報(bào) 2015年1期
李 軍, 周 炯, 王起文
(杭州師范大學(xué) 信息科學(xué)與工程學(xué)院, 浙江 杭州 311121)
?
采用嵌入式處理器與可編程邏輯陣列的分布式圓機(jī)控制系統(tǒng)設(shè)計(jì)
李 軍, 周 炯, 王起文
(杭州師范大學(xué) 信息科學(xué)與工程學(xué)院, 浙江 杭州 311121)
為提高國(guó)產(chǎn)高檔針織圓機(jī)的控制技術(shù),針對(duì)現(xiàn)有圓機(jī)控制系統(tǒng)因采用集中式控制方式而存在系統(tǒng)擴(kuò)展性較差,穩(wěn)定性不夠,控制對(duì)象復(fù)雜多樣等問(wèn)題,采用集中管理分散控制的分布式層次化結(jié)構(gòu)體系,運(yùn)用嵌入式控制技術(shù),使用模塊化電路設(shè)計(jì)方法,開發(fā)了一種基于嵌入式處理器STM32與可編程邏輯陣列(FPGA)的分布式圓機(jī)控制系統(tǒng)。實(shí)際應(yīng)用表明,該系統(tǒng)不僅實(shí)現(xiàn)了圓機(jī)控制系統(tǒng)的所有功能,而且具有系統(tǒng)穩(wěn)定性高,可擴(kuò)展性好,控制容易等特點(diǎn),從而極大地提高了控制系統(tǒng)的實(shí)時(shí)性。
圓機(jī)控制系統(tǒng); 分布式控制; 嵌入式處理器; 可編程邏輯陣列
圓機(jī)是一種緯編針織機(jī)械,是針織行業(yè)的主要機(jī)械設(shè)備之一,具有產(chǎn)量高,工藝流程短,原料適用性廣等特點(diǎn),主要用于生產(chǎn)T恤、內(nèi)衣、毛衣等服裝和產(chǎn)業(yè)用布。
近年來(lái),國(guó)內(nèi)外的生產(chǎn)廠商根據(jù)客戶的需求都在努力開發(fā)新機(jī)種[1],在控制技術(shù)、壞針檢測(cè)、電子調(diào)線等諸多方面發(fā)展迅速,這使針織圓機(jī)的生產(chǎn)制造有了較快速的發(fā)展,出現(xiàn)了具有高機(jī)號(hào)、細(xì)針距、多路數(shù)、多功能等特點(diǎn)的雙面提花圓機(jī),可以完成之前只能在橫機(jī)上實(shí)現(xiàn)的羅口編織、單雙面提花、嵌花等編織功能,并且工作效率比橫機(jī)高上數(shù)倍。圓機(jī)控制技術(shù)伴隨著圓機(jī)的發(fā)展而發(fā)展,高檔針織圓機(jī)控制系統(tǒng)具有廣闊的發(fā)展空間和市場(chǎng)潛力。目前,高檔針織圓機(jī)技術(shù)基本被意大利、德國(guó)、日本等國(guó)家壟斷,據(jù)統(tǒng)計(jì)[2],我國(guó)每年從上述國(guó)家進(jìn)口針織圓機(jī)(包括圓機(jī)控制系統(tǒng))數(shù)量是亞洲國(guó)家之最,而且引進(jìn)價(jià)格極其昂貴。隨著機(jī)械制造、機(jī)電一體化和電子選針等技術(shù)在國(guó)產(chǎn)針織圓機(jī)裝備上的廣泛應(yīng)用,我國(guó)的針織裝備技術(shù)水平與國(guó)外的差距已經(jīng)逐漸縮短[3]。國(guó)產(chǎn)針織圓機(jī),無(wú)論是單、雙面圓機(jī),還是電腦提花圓機(jī),在設(shè)備的多功能和質(zhì)量穩(wěn)定性上都有了顯著的提高,但在高機(jī)號(hào)、細(xì)針距、多路數(shù)、高精度、多功能的高檔針織圓機(jī)的制造和控制技術(shù)上與國(guó)外仍存在著一定的差距,尤其是在智能控制、電子選針、多路數(shù)執(zhí)行器驅(qū)動(dòng)等技術(shù)上,需進(jìn)一步深入研究[4-6]。同時(shí),現(xiàn)有圓機(jī)控制系統(tǒng)大都采用集中式的控制方式,系統(tǒng)存在可擴(kuò)展性較差,穩(wěn)定性不夠等問(wèn)題。
經(jīng)過(guò)多年的發(fā)展,國(guó)內(nèi)市場(chǎng)舊圓機(jī)數(shù)量龐大,這些舊機(jī)器因控制系統(tǒng)的老化或落后而閑置,由此造成了極大的資源浪費(fèi)。此外,國(guó)內(nèi)一些企業(yè)為了減少資金投入,廉價(jià)從國(guó)外購(gòu)置大量二手圓機(jī),這些機(jī)器機(jī)械性能良好,但是控制系統(tǒng)大部分都已經(jīng)無(wú)法正常工作。因此,研究和開發(fā)高檔針織圓機(jī)控制系統(tǒng),實(shí)現(xiàn)高機(jī)號(hào)、多路數(shù)、細(xì)針距雙面圓機(jī)的自動(dòng)化控制,對(duì)提高我國(guó)針織裝備技術(shù)水平,進(jìn)一步縮短與國(guó)際先進(jìn)水平的差距,打破國(guó)際技術(shù)壟斷具有重要意義,同時(shí),對(duì)于實(shí)現(xiàn)舊機(jī)器的改造,提高資源的利用率,具有非常重要的現(xiàn)實(shí)意義。
本文采用分布式模塊化系統(tǒng)架構(gòu),運(yùn)用嵌入式控制技術(shù),設(shè)計(jì)了一種基于嵌入式處理器STM32和可編程邏輯器件(FPGA)的分布式圓機(jī)控制系統(tǒng)。
1 圓機(jī)結(jié)構(gòu)概述
圓機(jī)整體結(jié)構(gòu)由機(jī)械裝置、控制系統(tǒng)和花型與動(dòng)作處理軟件3部分構(gòu)成[7],如圖1所示。機(jī)械裝置是圓機(jī)的基礎(chǔ)部分,對(duì)產(chǎn)品的質(zhì)量起決定性作用;控制系統(tǒng)是圓機(jī)的核心部分,對(duì)圓機(jī)運(yùn)行起調(diào)度指揮作用;花型與動(dòng)作處理軟件是圓機(jī)的輔助部分,為圓機(jī)運(yùn)行提供關(guān)鍵的控制數(shù)據(jù)。本文著重介紹圓機(jī)控制系統(tǒng)的設(shè)計(jì)。
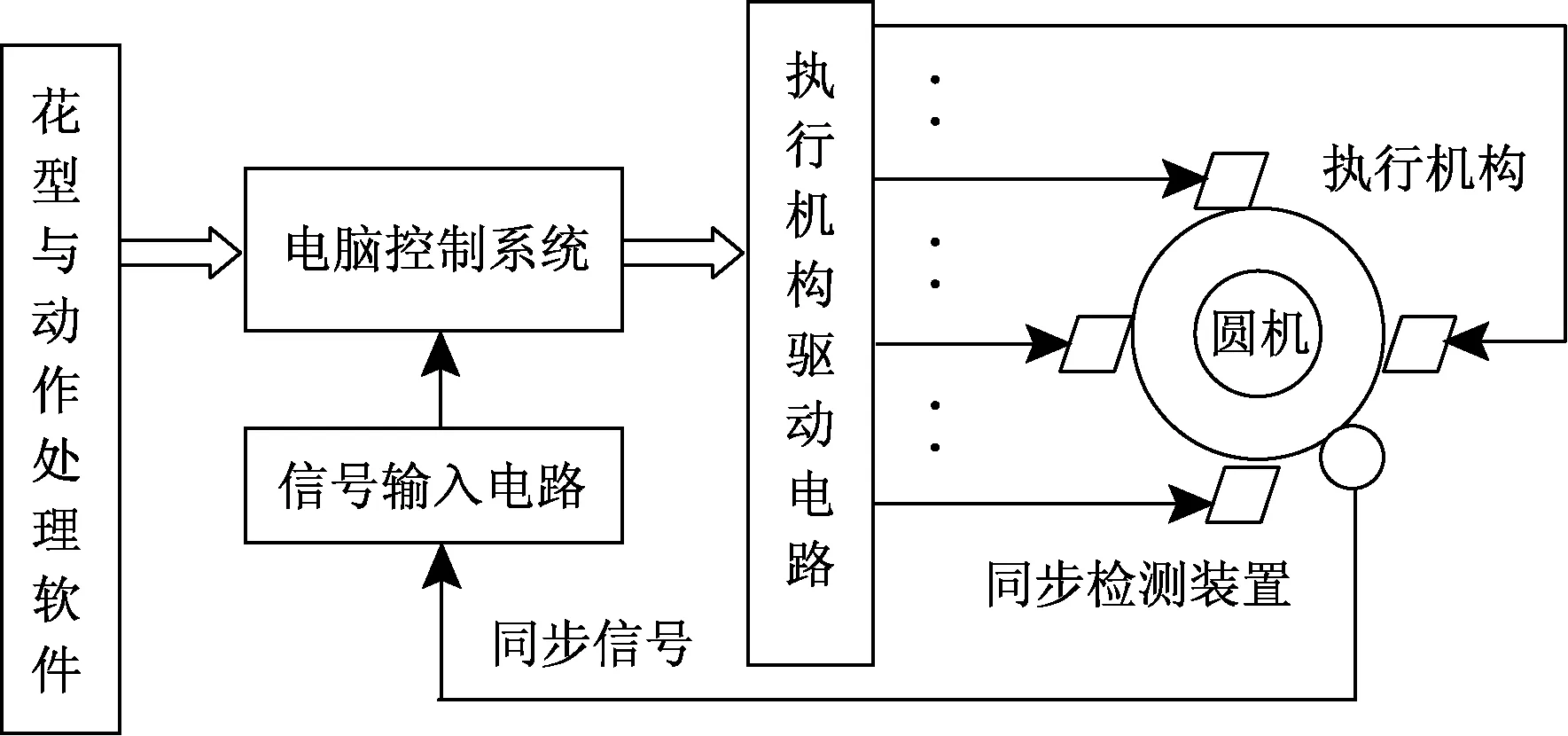
圖1 圓機(jī)整體結(jié)構(gòu)Fig.1 Structure of circular kniting machine
2 控制系統(tǒng)硬件設(shè)計(jì)
2.1 硬件總體結(jié)構(gòu)
系統(tǒng)硬件結(jié)構(gòu)采用層次結(jié)構(gòu)框架,使用分布式控制方式,從上向下,依次分為管理層、協(xié)調(diào)層、執(zhí)行層,管理層、協(xié)調(diào)層和執(zhí)行層之間通過(guò)并行總線連接。
2.2 管理層
管理層結(jié)構(gòu)如圖2所示。管理層采用基于STM32嵌入式處理器設(shè)計(jì),STM32芯片具有豐富的硬件資源,較好地滿足了系統(tǒng)需求。LCD顯示屏和觸摸屏通過(guò)串行通信芯片連接到STM32的串行口上,用戶利用此接口與控制系統(tǒng)進(jìn)行人機(jī)交互;PSRAM數(shù)據(jù)存儲(chǔ)器連接到STM32的FSMC總線上,用于存儲(chǔ)花型數(shù)據(jù)文件;USB設(shè)備接口驅(qū)動(dòng)芯片連接到STM32的SPI接口上,實(shí)現(xiàn)花型數(shù)據(jù)文件的輸入輸出;考慮管理層與協(xié)調(diào)層之間傳輸?shù)臄?shù)據(jù)量大、實(shí)時(shí)性高等要求,它們之間采用并行通信方式。
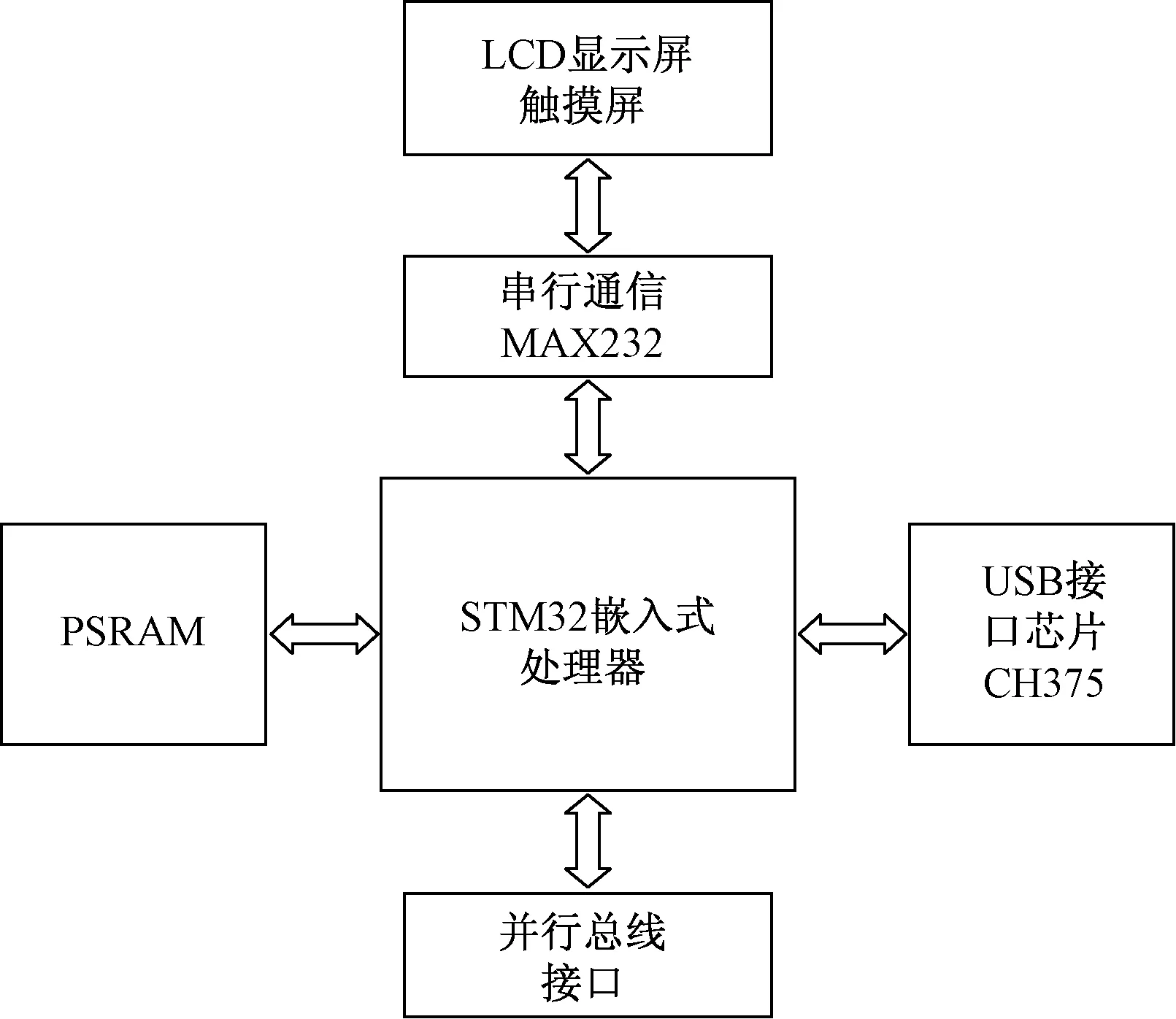
圖2 管理層結(jié)構(gòu)Fig.2 Structure of management layer
2.3 協(xié)調(diào)層
協(xié)調(diào)層結(jié)構(gòu)如圖3所示。協(xié)調(diào)層采用基于可編程邏輯器件設(shè)計(jì)。可編程邏輯器件具有很高的可靠性和靈活性,在EP2C8T144上可以集成CPU IP軟核、并行總線接口等電路。霍爾傳感器、光電編碼器、伺服電機(jī)控制器、狀態(tài)監(jiān)控器通過(guò)光耦隔離,可編程邏輯器件的IO口相連。可編程邏輯器件對(duì)從各傳感器獲取的信號(hào)進(jìn)行濾波、倍頻等預(yù)處理,再將信息傳送給管理層,同時(shí),接收管理層的指令并分發(fā)給執(zhí)行層的各驅(qū)動(dòng)器執(zhí)行。考慮執(zhí)行層的擴(kuò)展性和實(shí)時(shí)性,它們之間通過(guò)并行總線方式連接。
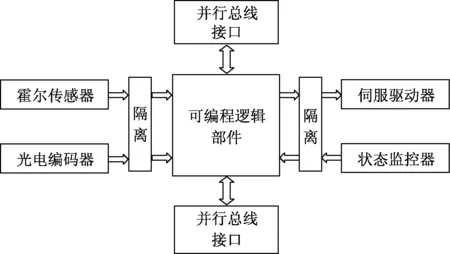
圖3 協(xié)調(diào)層結(jié)構(gòu)Fig.3 Structure of coordination layer
2.4 執(zhí)行層
執(zhí)行層由多個(gè)執(zhí)行單元構(gòu)成,執(zhí)行單元結(jié)構(gòu)如圖4所示。執(zhí)行單元也采用基于可編程邏輯器件設(shè)計(jì),實(shí)現(xiàn)對(duì)選針器、氣閥、密度控制電動(dòng)機(jī)等執(zhí)行機(jī)構(gòu)的控制。其中選針模塊、氣閥模塊采用大功率管進(jìn)行功率驅(qū)動(dòng);密度控制電動(dòng)機(jī)模塊采用步進(jìn)電動(dòng)機(jī)驅(qū)動(dòng)芯片來(lái)驅(qū)動(dòng)步進(jìn)電動(dòng)機(jī)。各執(zhí)行機(jī)構(gòu)與可編程邏輯器件之間采用光電耦合方式耦合,可以起到很好的隔離效果。

圖4 執(zhí)行單元結(jié)構(gòu)Fig.4 Structure of execution unit structure layer
3 控制系統(tǒng)軟件設(shè)計(jì)
3.1 軟件總體結(jié)構(gòu)
控制系統(tǒng)采用了分布式控制方式的硬件結(jié)構(gòu),對(duì)應(yīng)的軟件設(shè)計(jì)也分為管理層程序、協(xié)調(diào)層程序和執(zhí)行層程序3部分,管理層程序是核心,協(xié)調(diào)層程序是紐帶,執(zhí)行層程序是基礎(chǔ)。
管理層程序是基于STM32微處理器設(shè)計(jì)的嵌入式實(shí)時(shí)系統(tǒng),是整個(gè)系統(tǒng)的調(diào)度指揮中心。設(shè)計(jì)了帶觸摸屏輸入的友好人機(jī)界面,具有提花工作、工程測(cè)試、參數(shù)設(shè)置、文件輸入、系統(tǒng)升級(jí)等功能模塊。
協(xié)調(diào)層程序采用FPGA為控制單元,集成CPU IP核,構(gòu)成嵌入式實(shí)時(shí)系統(tǒng),用于協(xié)調(diào)管理層、執(zhí)行層的有序工作。協(xié)調(diào)層主要是接收光電編碼器、霍爾傳感器等各種同步信號(hào)和斷紗、漏針等各種狀態(tài)監(jiān)測(cè)信號(hào),對(duì)它們進(jìn)行信號(hào)整形、測(cè)量等預(yù)處理后再傳送給管理層。同時(shí),接收管理層傳輸過(guò)來(lái)的指令和數(shù)據(jù),根據(jù)要求下發(fā)至執(zhí)行層。協(xié)調(diào)層程序需要實(shí)時(shí)響應(yīng)主機(jī)的各類同步信號(hào)、定位信號(hào)、事件觸發(fā)信號(hào)和報(bào)警信號(hào),提高控制的實(shí)時(shí)性和可靠性。
3.2 軟件工作模式分析
整個(gè)控制系統(tǒng)的軟件設(shè)計(jì)是個(gè)非常復(fù)雜的工作,存在多個(gè)狀態(tài)變遷和多個(gè)事件驅(qū)動(dòng)的情況[8],軟件工作模式如圖5所示。
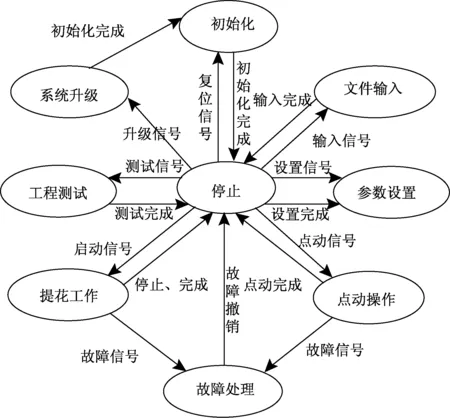
圖5 軟件工作模式Fig.5 Mode of software
系統(tǒng)開機(jī)后,首先對(duì)管理層、協(xié)調(diào)層、執(zhí)行層的各種參數(shù)、變量進(jìn)行初始化,完成人機(jī)交互界面顯示、各層間通信握手、執(zhí)行機(jī)構(gòu)復(fù)位等操作,此時(shí),圓機(jī)處于停止模式,根據(jù)用戶不同選擇,可以進(jìn)入系統(tǒng)升級(jí)、文件輸入、工程測(cè)試、參數(shù)設(shè)置、提花工作等工作狀態(tài)。
系統(tǒng)升級(jí)模式,主要完成管理層應(yīng)用程序的IAP在線升級(jí),通過(guò)USB接口對(duì)系統(tǒng)的程序固件進(jìn)行更新升級(jí),而無(wú)需通過(guò)傳統(tǒng)的JTAG方式做燒錄更新,升級(jí)完成后,系統(tǒng)重新進(jìn)入初始化模式。
文件輸入模式,主要完成花型文件和參數(shù)文件的輸入,軟件可以對(duì)讀入文件進(jìn)行顯示、查看、校驗(yàn)等操作。
參數(shù)設(shè)置模式,主要完成圓機(jī)工作所需的各種參數(shù)設(shè)置、保存和修改等功能。
工程測(cè)試模式,主要實(shí)現(xiàn)了選針器、氣閥、步進(jìn)電動(dòng)機(jī)等執(zhí)行機(jī)構(gòu)的測(cè)試,便于整機(jī)調(diào)試。
提花工作模式,主要根據(jù)協(xié)調(diào)層傳輸過(guò)來(lái)的圈信號(hào)和針信號(hào),快速準(zhǔn)確地取出靜態(tài)數(shù)據(jù)存儲(chǔ)器中的花型和動(dòng)作數(shù)據(jù),通過(guò)并行總線傳輸給協(xié)調(diào)層,實(shí)現(xiàn)新織和續(xù)織等功能。運(yùn)行過(guò)程中,管理層在液晶屏動(dòng)態(tài)顯示轉(zhuǎn)速、幅數(shù)、針數(shù)、圈數(shù)等編織信息。同時(shí),一旦機(jī)器發(fā)生故障,立即停止當(dāng)前操作,并將當(dāng)前操作相關(guān)的數(shù)據(jù)保存在數(shù)據(jù)存儲(chǔ)器中,進(jìn)入故障處理模式。
通過(guò)不同數(shù)量處理器的反復(fù)試驗(yàn)數(shù)據(jù)分析,得到的結(jié)論是處理器的數(shù)目從少到多的遞增,對(duì)應(yīng)的收斂值越小,但計(jì)算時(shí)間是先減少,后增加。在試驗(yàn)中,當(dāng)處理器的數(shù)量為4時(shí),收斂值時(shí)間花費(fèi)是最少的。處理器的數(shù)量再遞增到6,所花費(fèi)的時(shí)間并非減少,反而是增加,原因是處理器數(shù)量增加,并行蟻群算法的處理器間進(jìn)程信息傳遞及通訊時(shí)間花費(fèi)增大,因而使得總的計(jì)算花費(fèi)時(shí)間增加。對(duì)于收斂值隨著處理器的增加而減少的結(jié)果,原因是處理器數(shù)量增加,算法的搜尋區(qū)域更大,盡管花費(fèi)在搜尋的時(shí)間更多,但最優(yōu)解卻容易得到,可靠性更好。
故障處理模式,主要完成斷紗、漏針等故障檢測(cè),在液晶屏上顯示故障類型同時(shí)停止機(jī)器工作,故障消除后,進(jìn)入提花工作模式,利用“續(xù)織”功能,即可重新啟動(dòng)織物編織。
點(diǎn)動(dòng)操作模式,此模式與提花工作模式類似,只是此模式是要長(zhǎng)按點(diǎn)動(dòng)開關(guān)才能能讓機(jī)器運(yùn)行,并且運(yùn)行速度很低。這樣做的目的是方便機(jī)器生產(chǎn)調(diào)試、檢修、織物修補(bǔ)等操作。
3.3 關(guān)鍵程序?qū)崿F(xiàn)方法
3.3.1 轉(zhuǎn)速測(cè)量與控制
控制系統(tǒng)要求能準(zhǔn)確實(shí)時(shí)測(cè)量和顯示圓機(jī)的轉(zhuǎn)速,并且要求能根據(jù)設(shè)定值控制轉(zhuǎn)速。系統(tǒng)采用光電編碼器檢測(cè)轉(zhuǎn)動(dòng)位置[9],采用FPGA對(duì)編碼器輸出的A、B相信號(hào)進(jìn)行整形濾波、四倍頻等處理[10-11],實(shí)現(xiàn)四細(xì)分與辨向。經(jīng)四細(xì)分和辨向電路處理后的信號(hào)是圓機(jī)轉(zhuǎn)動(dòng)位置的準(zhǔn)確反映,同時(shí)也是圓機(jī)轉(zhuǎn)速測(cè)量最好的信號(hào)源,因此,系統(tǒng)采用FPGA在一定閘門時(shí)間內(nèi)對(duì)信號(hào)的脈沖進(jìn)行計(jì)數(shù),從而可以準(zhǔn)確計(jì)算出轉(zhuǎn)動(dòng)速度。
準(zhǔn)確測(cè)量圓機(jī)轉(zhuǎn)速的同時(shí)需要能根據(jù)速度設(shè)定值控制轉(zhuǎn)速,圓機(jī)速度控制的原理是在伺服驅(qū)動(dòng)器的速度控制端給定一電壓值,伺服驅(qū)動(dòng)器根據(jù)給定的電壓控制圓機(jī)按一定的速度轉(zhuǎn)動(dòng)。但是,由于圓機(jī)的潤(rùn)滑程度、進(jìn)紗路數(shù)、機(jī)器冷熱等狀況不同,同一給定值將會(huì)出現(xiàn)不同轉(zhuǎn)動(dòng)速度的情況,因此,為了克服以上問(wèn)題,需要構(gòu)建一個(gè)速度控制的閉環(huán)回路,系統(tǒng)采用PWM調(diào)節(jié)方式,根據(jù)設(shè)定值和當(dāng)前速度測(cè)量的反饋調(diào)整給定值,已達(dá)到維持穩(wěn)定的轉(zhuǎn)速,PWM時(shí)序采用FPGA編程產(chǎn)生。
3.3.2 系統(tǒng)通信協(xié)議設(shè)計(jì)
控制系統(tǒng)采用分布式模塊化的控制方式,以適應(yīng)12路、24路、48路、72路等不同機(jī)型的擴(kuò)展需求。因系統(tǒng)控制對(duì)象多而復(fù)雜,時(shí)序要求快而準(zhǔn)確,為了能保證管理層、協(xié)調(diào)層、執(zhí)行層的眾多執(zhí)行機(jī)構(gòu)之間能實(shí)時(shí)且可靠地傳輸數(shù)據(jù),本文系統(tǒng)設(shè)計(jì)了主從通信協(xié)議,協(xié)議幀由地址幀和數(shù)據(jù)幀組成,地址幀格式包括地址幀標(biāo)志和地址,數(shù)據(jù)幀格式包括數(shù)據(jù)幀標(biāo)志、數(shù)據(jù)幀長(zhǎng)度、數(shù)據(jù)塊和校驗(yàn)和。
地址幀標(biāo)志用0xAA表示,數(shù)據(jù)幀標(biāo)志用0xDD表示。數(shù)據(jù)幀長(zhǎng)度表示一組新數(shù)據(jù)的開始和數(shù)據(jù)長(zhǎng)度,校驗(yàn)和是數(shù)據(jù)塊中的全部數(shù)據(jù)的累加和,用以判斷傳輸過(guò)程中的錯(cuò)誤,一旦判斷出數(shù)據(jù)丟失或錯(cuò)誤,立即啟動(dòng)重傳機(jī)制。
管理層在初始化后通過(guò)協(xié)調(diào)層向執(zhí)行層中的各個(gè)執(zhí)行單元發(fā)送地址幀。執(zhí)行單元通過(guò)協(xié)調(diào)層接收管理層發(fā)來(lái)的幀后,提取其中的地址信息,與存儲(chǔ)器中本執(zhí)行單元的地址進(jìn)行比較,若是當(dāng)前執(zhí)行單元的地址,則開始準(zhǔn)備接收數(shù)據(jù)幀。若不是當(dāng)前執(zhí)行單元地址,則不接收后續(xù)的數(shù)據(jù)。
4 性能指標(biāo)分析
本文控制系統(tǒng)的主要性能指標(biāo)如表1所示。
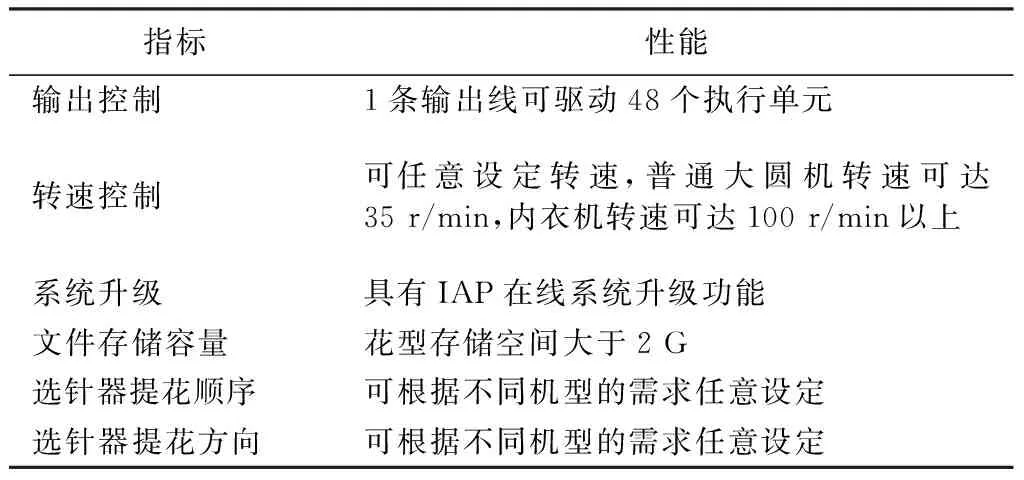
表1 控制系統(tǒng)的主要性能指標(biāo)
控制系統(tǒng)設(shè)計(jì)了帶觸摸功能的人機(jī)交互界面,操作簡(jiǎn)單方便,設(shè)計(jì)有USB接口,文件輸入輸出、系統(tǒng)升級(jí)方便可靠;系統(tǒng)輸出控制接口有4個(gè),每個(gè)控制接口可同時(shí)驅(qū)動(dòng)48個(gè)執(zhí)行單元,可以方便地適應(yīng)12路、24路、48路、72路等不同機(jī)型;系統(tǒng)的圓機(jī)轉(zhuǎn)速分段可控,根據(jù)用戶需求,可以任意指定每圈的運(yùn)行速度;選針器提花順序、方向等參數(shù)也可以任意設(shè)定,以適應(yīng)選針器“倒裝”等特殊機(jī)型需求。
系統(tǒng)采用分布式設(shè)計(jì)策略,兼容性非常強(qiáng),同時(shí),穩(wěn)定性大大提高。控制系統(tǒng)能夠?qū)崿F(xiàn)單面提花、雙面提花、正反面提花、雙向移圈等功能,單臺(tái)產(chǎn)量超過(guò)國(guó)外進(jìn)口的機(jī)器,而價(jià)格卻比進(jìn)口系統(tǒng)低很多。
5 結(jié) 語(yǔ)
本文提出的基于STM32與FPGA的分布式圓機(jī)控制系統(tǒng)實(shí)現(xiàn)了現(xiàn)有圓機(jī)控制系統(tǒng)的所有功能。采用分布式模塊化架構(gòu),設(shè)計(jì)了以嵌入式處理器和可編程邏輯器件為核心的控制系統(tǒng),提高了系統(tǒng)運(yùn)行的可靠性,降低了生產(chǎn)和維護(hù)成本,且操作簡(jiǎn)單,具有良好的可擴(kuò)展能力。
本文控制系統(tǒng)已經(jīng)在紹興、福建等針織圓機(jī)整機(jī)生產(chǎn)廠家和濮院、義烏等地的各種舊圓機(jī)改造中廣泛使用,用戶評(píng)價(jià)該系統(tǒng)具有穩(wěn)定性高,功能齊全,價(jià)格低廉,操作方便等特點(diǎn),帶來(lái)了較好的經(jīng)濟(jì)效益。對(duì)提高我國(guó)針織裝備技術(shù)水平和對(duì)實(shí)現(xiàn)舊機(jī)器的改造,提高資源的利用率等方面都具有非常重要的現(xiàn)實(shí)意義。
[1] 雷寶玉.第十六屆上海國(guó)際紡織工業(yè)展覽會(huì)圓緯機(jī)述評(píng)[J].針織工業(yè),2013(7): 1-8. LEI Baoyu.Review of the circular weft knitting machines on the 16thShanghai International Textile Industry Exhibition[J]. Knitting Industries,2013(7): 1-8.
[2] 朱書卷. 2011年針織圓機(jī)和橫機(jī)交易量統(tǒng)計(jì)[J].針織工業(yè),2013(5):12-14. ZHU Shujuan. Circular knitting machines and knitting machines trading volume statistics of 2011[J]. Knitting Industries,2013(5):12-14.
[3] 黃學(xué)水,李忠.國(guó)產(chǎn)針織機(jī)械技術(shù)與國(guó)外差距縮小[J]. 紡織服裝周刊,2007(38): 25. HUANG Xueshui,LI Zhong. Narrowing domestic knitting machine technology gap with foreign countries [J].Textile Apparel Weekly,2007(38): 25.
[4] 王寶華,陳祥勤. 2010中國(guó)國(guó)際紡機(jī)展圓機(jī)新技術(shù)[J]. 針織工業(yè), 2010(8): 60-61. WANG Baohua,CHEN Xiangqin. 2010 China International Textile Machinery Exhibition on new technology of circular knitting machine [J]. Knitting Industries,2010(8): 60-61.
[5] 龍海如.緯編針織機(jī)械發(fā)展動(dòng)態(tài)[J].紡織導(dǎo)報(bào),2010(9):51-54. LONG Hairu. Developing trend of weft knitting machine [J]. China Textile Leader,2010(9):51-54.
[6] 丁玉苗.針織機(jī)械與技術(shù)的最新進(jìn)展[J].紡織導(dǎo)報(bào),2012(9): 64-70. DING Yumiao. Latest development in knitting equipment and technology [J]. China Textile Leader,2012(9): 64-70.
[7] 李軍. 基于WinCE平臺(tái)的圓緯機(jī)控制系統(tǒng)的研究與開發(fā)[D].北京:北京郵電大學(xué),2008:18. LI Jun. Research and development of circular knitting machine control system based on WinCE[D].Beijing: Beijing University of Posts and Telecommunications, 2008:18.
[8] 韓安太,郭小華.多功能編織機(jī)控制系統(tǒng)的設(shè)計(jì)開發(fā)[J]. 針織工業(yè), 2009(3): 111-116. HAN Antai, GUO Xiaohua. Design of control system of multi-function jacquard knitting machine[J]. Knitting Industries, 2009(3): 111-116.
[9] 張成俊,左小艷,張弛,等.電腦提花圓緯機(jī)旋轉(zhuǎn)位置檢測(cè)研究[J].毛紡科技,2013(1):47-50. ZHANG Chengjun,ZUO Xiaoyan,ZHANG Chi, et al. Research of computer jacquard circular knitting machine rotation position detectionz[J]. Wool Textile Journal, 2013(1):47-50.
[10] 郭鍵,朱杰.基于CPLD的光電編碼器的四倍頻計(jì)數(shù)電路設(shè)計(jì)[J]. 計(jì)算機(jī)測(cè)量與控制, 2013(7):1878-1888. GUO Jian,ZHU Jie. Fourfold frequency multiplication counter circuit design of photoelectrical encoder based on CPLD[J].Computer Measurement & Control, 2013(7): 1878-1888.
[11] 金鋒,盧楊,王文松,等.光柵四倍頻細(xì)分電路模塊的分析與設(shè)計(jì)[J]. 北京理工大學(xué)學(xué)報(bào),2006(12):1073-1076. JIN Feng, LU Yang, WANG Wensong, et al. Analysis and design of a grating with four fub-frequency circuit modules [J].Journal of Beijing Institute of Technology, 2006(12):1073-1076.
Design of distributed control system of circular knitting machine based on STM32 and FPGA
LI Jun, ZHOU Jiong, WANG Qiwen
(SchoolofInformationScienceandEngineering,HangzhouNormalUniversity,Hangzhou,Zhejiang311121,China)
To improve the control technique of the domestic high-grade circular knitting machine, and to solve the problems of low scalability, poor stability and complex and diverse control objects due to employing centralized control manner of the existing circular machine control systems, a new type of circular knitting machine control system using distributed control technique is designed in this paper. A layered distributed architecture with centralized management and distributed control is adopted, and the embedded control technology accompanied with the modular circuit design method is used based on the ARM processor STM32 and the field programmable gate array (FPGA). From the practical application, it is shown that this type of control system not only realized all the functions of the circular knitting machine control system, but also has the features of higher running stability and reliability and much better flexibility and is easier to control, thus greatly improved the real-time characteristic of the control system.
circular knitting machine control system; distributed control; embedded processor; FPGA
10.13475/j.fzxb.201501014705
2013-11-11
2014-05-19
浙江省科技廳計(jì)劃項(xiàng)目(2012C21047)
李軍(1982—),男,實(shí)驗(yàn)師,碩士。研究方向?yàn)榍度胧较到y(tǒng)開發(fā)與應(yīng)用。E-mail:bell369@163.com。
TS 183.4
A
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
電子制作(2019年7期)2019-04-25 13:17:14
電子制作(2018年18期)2018-11-14 01:48:16
鐵道通信信號(hào)(2018年2期)2018-04-18 12:18:23
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
電鍍與環(huán)保(2016年3期)2017-01-20 08:15:32