基于蟻群算法的LFM信號參數估計
2015-06-08 08:20:40關曉謙劉東平李東濤
系統仿真技術 2015年2期
關鍵詞:信號
關曉謙,劉東平,李東濤
(中國洛陽電子裝備試驗中心,河南濟源454650)
1 引 言
線性調頻(Linear Frequency Modulation,LFM)信號是在脈沖持續期間內信號頻率連續線性變化的信號,是一類非常重要的非平穩信號,被廣泛應用于雷達、聲納和通信等信息系統[1-2]。調頻斜率和起始頻率作為線性調頻信號的2個重要參數,其估計問題一直是LFM信號處理領域的研究熱點和難點。目前,已經出現了很多比較成熟的算法,比如Radon-Wigner變換、分數階傅里葉變換(fractional Fourier transform,FRFT)和最大似然估計(ML)等方法[3-7]。其中基于 FRFT 的LFM信號參數估計方法最受關注。但是,該方法每檢測一個信號都要對信號分別求所有旋轉角α∈[0,π]的 FRFT,再進行二維搜索、濾波以及FRFT逆變換,計算量大。而且對信號反復進行FRFT、濾波和FRFT逆變換也會給弱信號帶來誤差。
文獻[8]提出利用LFM信號能量一定時,在相同的時寬范圍內,其頻譜幅度平方與調頻斜率呈反比的特性,通過在固定區間上改變解線調參考信號的調頻斜率,逐步進行搜索估計信號參數的算法。該算法在一定程度上解決了分數階Fourier變換法的大運算量問題,但決定該算法估計精度的搜索步長這一參數,卻受算法運算量的制約,步長太大估計誤差變大,步長太小則運算量急劇上升,算法無法平衡估計精度和運算量之間的矛盾。針對此問題,本文提出了基于蟻群算法優化的參數估計算法。
2 LFM信號參數估計原理
當時寬帶寬積遠遠大于1時,LFM信號的幅譜近似為無菲涅爾起伏的矩形譜,其頻譜寬度近似等于信號帶寬B[9]。設LFM信號為:
式中:A為信號幅度;f0為載頻;k為調頻斜率;n(t)零均值的高斯白噪聲;T為信號的時寬。
根據帕斯瓦爾定理可知,s(t)的功率P可表示為:

式中:S(ω)是信號s(t)的頻譜。
當BT>>1時,式(2)可近似化簡為:

將調頻斜率k與帶寬B和時寬T之間的關系B=kT代入式(3)可得:

對于一定時寬的LFM信號,其信號能量總是可測的,即信號能量是一定的,由式(4)可知,在相同時寬范圍內,其頻譜幅度平方與調頻斜率成反比。調頻斜率越小,對應的頻譜幅值就越大,其頻譜最大幅值對應譜線處的頻率即為起始頻率的真值。
根據LFM信號的以上性質,對LFM信號的調頻斜率和起始頻率的估計的步驟如下:
(1)將調頻斜率的變化范圍[kmin,kmax]以Δk為步長劃分為一系列離散值,記為ki(i=1,2,…,N),N為離散值的總數。
(2) 分別用 exp[-jπkit2](i=1,2,…,N)和 s(t)相乘,得到N組解調后的信號:
(3)分別對式(5)做傅里葉變換,得到N組頻譜對應的 N 個最大幅值,記為 A1,A2,…,AN,與此N個最大幅值對應的頻率值記為f1,f2,…,fN。
(4)對 A1,A2,…,AN進行比較,找出其中的最大值Amax,設Amax=Al,則得到調頻斜率的估計值ke=kl,起始頻率的估計值為fe=fl。
3 基于蟻群算法的參數估計算法
蟻群算法[10](Ant Colony Optimization,ACO)是近年來才提出的一種基于種群尋優的啟發式搜索算法,由意大利學者M.Dorigo等于1991年首先提出。該算法受到自然界中真實蟻群集體行為的啟發,利用真實蟻群通過個體間的信息傳遞、搜索從蟻穴到食物間的最短路徑的集體尋優特征,來解決一些離散系統中優化的困難問題。本文將蟻群算法的全局優化和啟發式尋優的特點應用于LFM信號參數估計,將LFM信號參數估計問題轉化為函數求極值問題,利用蟻群算法對函數尋優,提出了基于蟻群算法的LFM信號參數估計算法,算法步驟如下:
Step 1 初始化變量:設定調頻斜率k的變化范圍[kmin,kmax],并以 Δk為步長對其離散化,如下式:

令調頻斜率離散化后各結點初始信息素為τ1×N=U,螞蟻數目 M。
Step 2 計算各結點的選擇概率:
節點選擇采用輪盤賭的算法進行選擇,確保信息素濃度高的節點被選擇的概率高,輪盤賭算法在實際應用中如式A(n)=表示前 n個不同節點的選擇概率和。釋放蟻群中所有的M只螞蟻,同時在區間[0,1]上隨機生成M個小數,與M只螞蟻一一對應,判斷每個隨機數位于區間[A(n-1),A(n)]時所對應的n值,則認為M個n值所對應的kn就是被這群螞蟻選擇的調頻斜率,這樣既保證了信息素濃度高的節點被選擇的概率高,又避免了每只螞蟻均按照同一概率選擇kn。
Step 3 構造目標函數:

式中:abs(· )表示對信號去模運算;fft(· )表示對信號進行傅里葉變換。
Step 4 設置算法終止條件:若最近五次迭代搜索到的最優值之間相差小于某一設定值,則認為算法已搜索到最優值,算法終止;否則,完成所設定迭代次數,算法終止。
將式(7)選擇的kn代入式(8),計算目標函數值,若滿足算法終止條件,則算法終止,設Amax取最大值時kn=k0,則k0即為信號調頻斜率的最優估計值。若不滿足算法終止條件,則更新信息素,并返回Step2,滿足算法終止條件。
Step 5 把kn=k0代入式(5)中,求其傅里葉變換,找出對應于頻譜最大的頻率f,即為起始頻率的最優估計值。
4 仿真結果分析
4.1 參數估計結果分析
為了驗證算法的可靠性,取一個單分量LFM信號進行仿真驗證。設接收到的LFM信號模型如式(1)所示,為了便于計算取幅度值A=1,信號起始頻率為350 Hz,調頻斜率k=60 Hz/s,其估計范圍為[40 Hz/s,80Hz/s],信號觀測長度 T=5 s,采樣頻率為fs=2 kHz,信號信噪比為-20 dB;螞蟻個數為100,初始信息素U=15,信息素的揮發度為0.1。分別用本文算法、文獻[8]算法和FRFT算法對此信號模型參數進行估計,經過14次迭代(更新了14次信息素)得到參數估計結果,估計結果見表1。
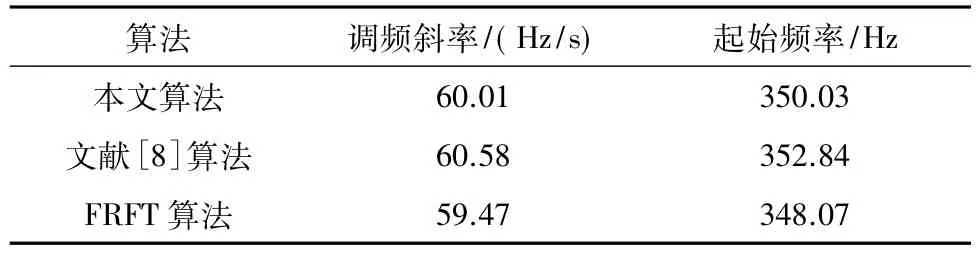
表1 信號參數估計結果Tab.1 Result of signal parameter estimate
分析參數估計結果可知:首先,由于算法參數都是在低信噪比條件先得到的,因此這三種算法都能較好地估計出信號的參數,且本文算法的參數估計精度高于文獻[8]算法和FRFT算法;其次,起始頻率的估計精度低于調頻斜率的估計精度,且文獻[8]算法和FRFT算法更差,其主要原因是:首先對信號調頻斜率進行估計,然后利用估計結果進而估計出起始頻率,導致了誤差的積累和放大,尤其是文獻[8]算法和FRFT算法要經過多次變換和逆變換,所以對信號的起始頻率估計精度就更差。
在信號參數不變的情況下,改變噪聲的強度,分別采用本文算法、文獻[8]算法和FRFT算法進行參數估計。重復進行30次Monte-Carle仿真,計算參數估計的均方誤差(Mean Square Error,MSE),圖1和圖2分別給出了調頻斜率和起始頻率的參數估計均方誤差隨信噪比(SNR)的變化曲線。
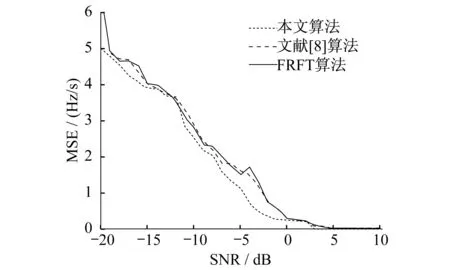
圖1 調頻斜率MSE隨信噪比變化曲線Fig.1 Changing curve of chirp rate MSE followed with the SNR
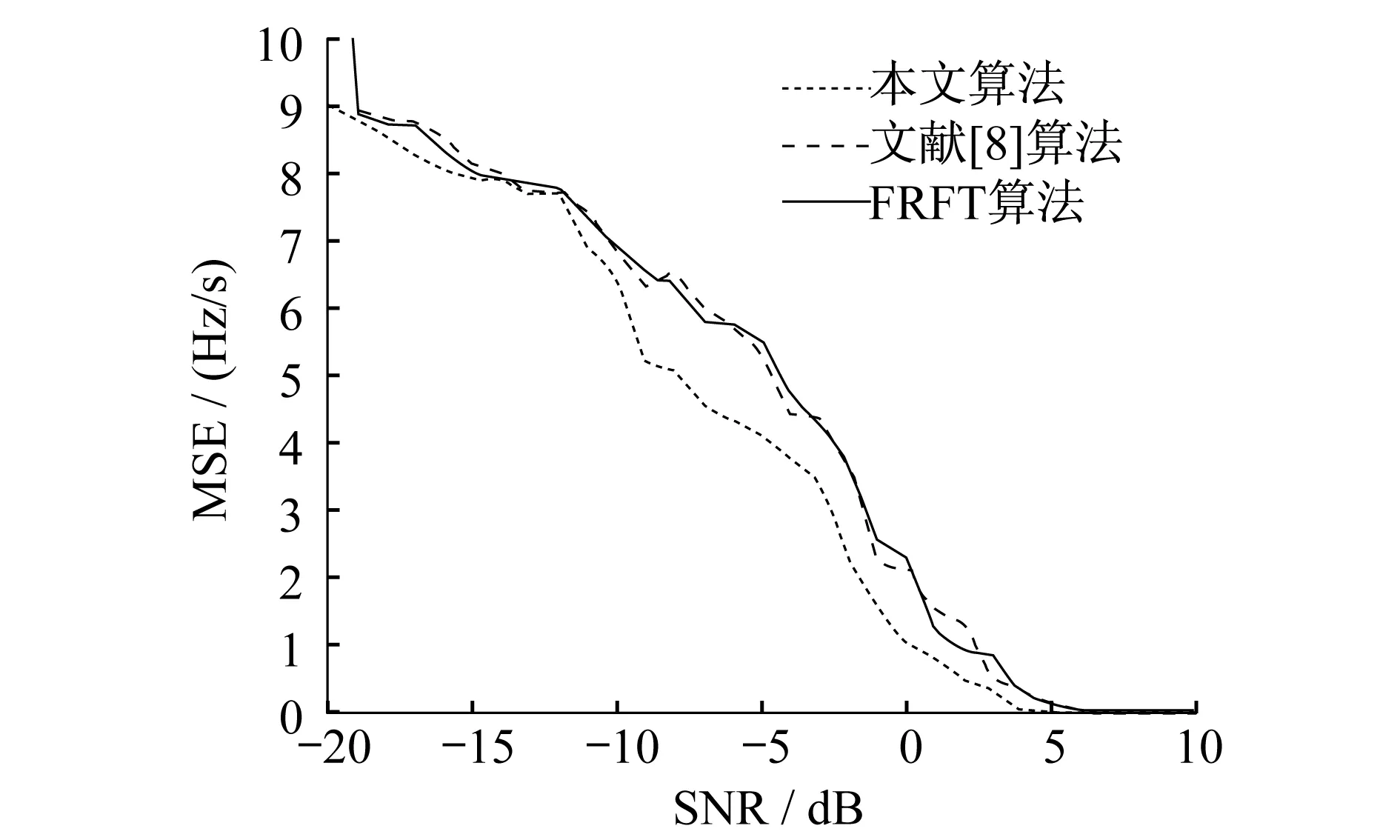
圖2 起始頻率MSE隨信噪比變化曲線Fig.2 Changing curve of origination frequency MSE followed with the SNR
圖1 和圖2進一步表明:調頻斜率的估計精度高于起始頻率的估計精度,此外,隨著信噪比的增加,信號參數估計誤差呈不斷下降的趨勢。
4.2 算法計算量分析
本文蟻群算法中螞蟻個數選為100,迭代次數選為50,則蟻群算法對調頻斜率的估計過程如圖3所示。
由圖3可知,當算法迭代到第14次的時候達到了算法終止條件要求的估計精度。FFT計算的復雜度為o( M ×log M)[11],其中 M 為采樣點數,則本文算法復雜度為:
o(14×100×M×log M)=o(1 400×M×log M)
文獻[6]算法的復雜度為:

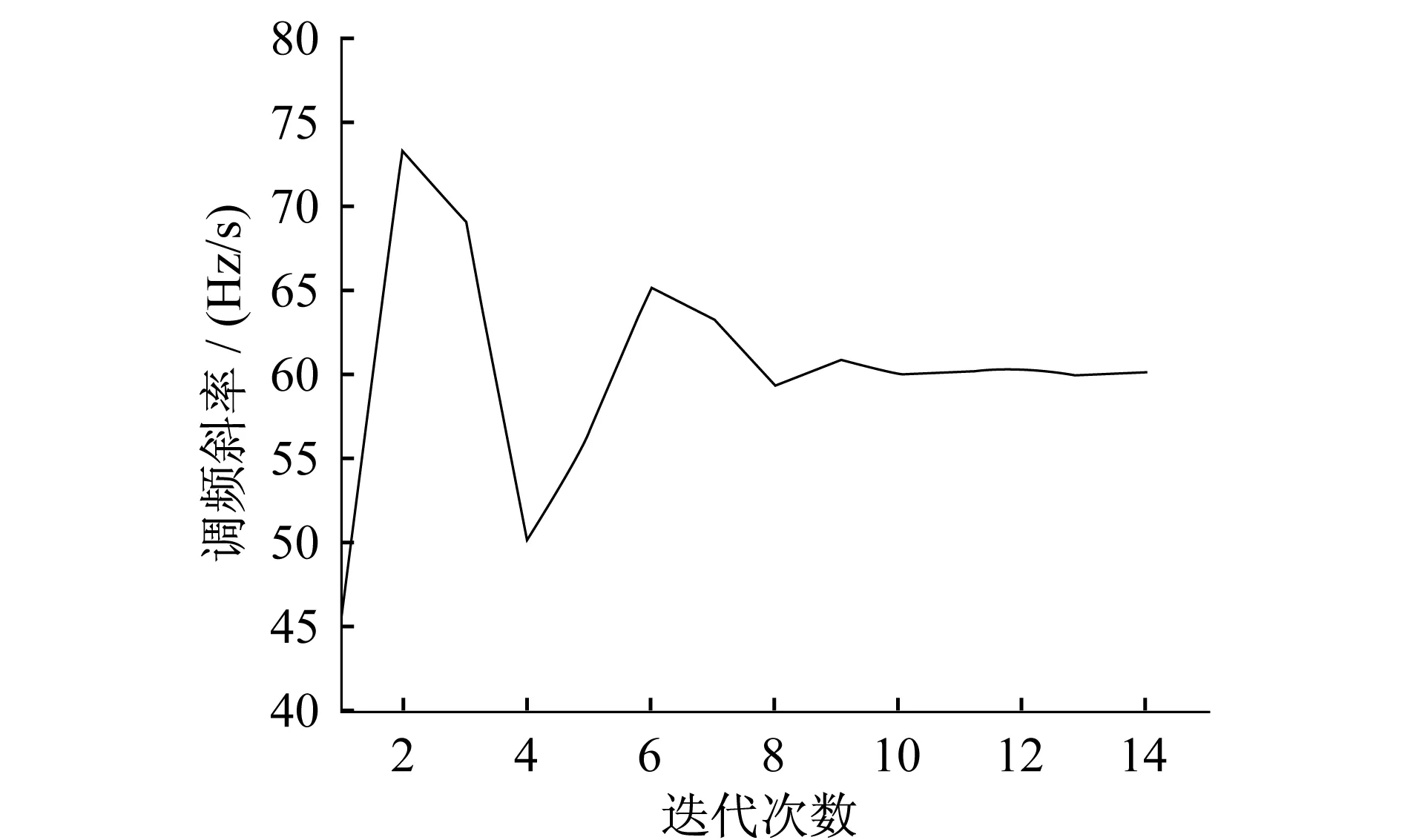
圖3 蟻群算法對調頻斜率估計過程Fig.3 Estimate process of chirp rate with ACO
若信號采樣點數為M,掃描點數為 m,則FRFT算法的復雜度為o( m×M×log M),掃描點數m由α的步長和范圍確定,其中α的步長取值為0.008[12],范圍為 10π,則 FRFT 算法的復雜度為:通過上述分析,利用蟻群算法對LFM參數進行估計,能夠在保證估計精度的情況下有效減少計算量,很好地提高了參數估計的效率和質量。
5 結 論
本文在文獻[8]的基礎上,將LFM信號參數估計問題轉化為函數求極值問題,利用蟻群算法全局優化和啟發式尋優的特點,提出了基于蟻群算法的LFM信號參數估計算法。該方法運算量小、參數估計精度高,有效克服了原算法運算量大、不易工程實踐的缺點。
[1] 王小謨,張光義.雷達與探測[M].第2版.北京:國防工業出版社,2008.WANG Xiaomo,ZHANG Guangyi.Radar and detection[M].2nd ed.Beijing:National Defense Industry Press,2008.
[2] Pace P E,Burton G D.Anit-ship cruise missiles:technology,simulation and ship self-defense[J].Journal of Electron Defense,1998,21(11):51- 55.
[3] Djuric P M,Kay S M.Parameter estimation of chirp signals[J].IEEE Trans on Acoustics,Speech,and Signal Processing,1990,38(12):2118-2126.
[4] 陳文武,蔡征宇,陳如山,等.脈沖噪聲下基于Robust STFT的LFM信號檢測與參數估計[J].南京理工大學學報,2012,12(2):312-329.CHEN Wenwu,CAI Zhengyu,CHEN Rushan,et al.Robust STFT-based detection and parameter estimation of LFM signal in impulsive noise[J].Journal of Nanjing University of Science and Technology,2012,12(2):312-329.
[5] Li Yan, Fu Hua, Kam Pooi-Yuen. Improved,approximate,time-domain ML estimators of chirp signal parameters and their performance analysis[J].IEEE Trans on Signal Processing,2009,57(4):1260-1272.
[6] Ijima H,Ohsumi A,Djurovic I.Parameter estimation of chirp signals in random noise using wigner distribution[C]∥Proc of the 47th Midwest Symposium on Circuits and Systems.Hiroshima,Japan:[s.n.],2004:177-180.
[7] 徐會法,劉鋒,張鑫.分數階Fourier域強弱LFM信號檢測與參數估計[J].信號處理,2011,27(7):1063-1068.XU Huifa,LIU Feng,ZHANG Xin.Detection and parameter estimation of strong and weak LFM signals in the fractional Fourier domain[J].Signal Proceessing,2011,27(7):1063-1068.
[8] 韓孟飛,王永慶,吳嗣亮,等.一種低信噪比下LFM信號參數快速估計算法[J].北京理工大學學報,2009,29(2):147-151.HAN Mengfei,WANGYongqing,WU Siliang,et al.A fast algorithm on parameter estimation of LFM signals under low SNR [J].Transactions of Beijing Institute of Technology,2009,29(2):147-151.
[9] 朱曉華.雷達信號分析與處理[M].北京:國防工業出版社,2011.ZHU Xiaohua.Radar signal analysis and processing[M].Beijing:National Defence Industry Press,2011.
[10] 楊淑瑩.模式識別與智能計算——MATLAB技術實現[M].北京:電子工業出版社,2008.YANG Shuying.Pattern recognition and intelligentize count—technology implement of MATLAB[M].Beijing:Publishing House of Electronics Industry,2008.
[11] 孫志國,陳晶,申麗然,等.基于TSLPFT1-FFT的線性調頻信號參數估計方法[J].電路與系統學報,2011,16(5):24-29.SUN Zhiguo,CHEN Jing,SHEN Liran,et al.Parameters estimation of linear frequency modulation signal based on TSLPFT1- FFT[J].Journal of Circuits and Systems,2011,16(5):24-29.
[12] 宋軍,劉渝,朱霞.LFM信號參數估計的插值FRFT算法[J].系統工程與電子技術,2011,33(10):2189-2194.SONG Jun,LIU Yu,ZHU Xia.Parameters estimation of LFM signals by interpolation based on FRFT[J].Systems Engineering and Electronics,2011,33(10):2189-2194.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06