艦載無人機飛行姿態對無源測向精度影響研究*
2015-06-07 10:52:06王梓宇朱青松
艦船電子工程 2015年11期
王梓宇 朱青松
(1.92941部隊 葫蘆島 125001)(2.海軍大連艦艇學院 大連 116018)
艦載無人機飛行姿態對無源測向精度影響研究*
王梓宇1朱青松2
(1.92941部隊 葫蘆島 125001)(2.海軍大連艦艇學院 大連 116018)
針對艦載無人機掛載電子偵察載荷對輻射源目標進行無源測向的問題,在對艦載無人機無源測向原理分析的基礎上,建立了無源測向精度計算模型,探討了誤差的主要來源,通過仿真得到了艦載無人機無源測向時飛行姿態的控制要求,為驅護艦編隊作戰中艦載無人機進行無源測向提供了理論與方法。
艦載無人機;無源測向;飛行姿態
Class NumberV249.1
1 引言
艦載無人機電子偵察載荷是利用無線電波在均勻媒體中勻速直線傳播的性質,根據入射電波在測向天線系統中感應產生的電壓幅值、相位或頻率上的差別來判定被測目標的方向,對多點或多站測向結果進行交會計算,確定被測目標的地理位置,實現定位。用這種手段確定輻射源方向的過程,稱為輻射源測向[1]。在信號情報偵察中,利用測向設備提供的方位數據,結合其他偵察設備提供的技術參數,可以了解敵方通信電臺、雷達的配置、布置情況以及通信網中各站之間的通聯關系、雷達平臺的部署,從而可以推斷出敵方的作戰態勢,獲得戰略、戰役或戰術情報[2]。輻射源測向體制很多,包括幅度比較式、沃特森-瓦特、多普勒、到達時間差、烏蘭韋伯爾等多種[3]。干涉儀測向體制是利用多個天線接收的信號的相位關系進行測向,相比較而言,干涉儀體制具有較高的測向精度,艦載無人機電子偵察載荷通常使用的是干涉儀測向體制。因此,本文站在作戰使用的角度,從相位干涉儀測向原理入手,分析艦載無人機飛行姿態對無源測向精度的影響。本章從作戰使用的角度,對干涉儀測向的相關問題進行研究。
2 艦載無人機無源測向原理
相位干涉儀測向的實質,是利用無線電波在測向基線上形成的相位差確定來波方向。一般情況下,測向機只需得到來波方位角就夠了,特殊情況下要求測向機具有對來波的方位角和仰角同時進行測量的能力,如艦載對空中目標、對短波天波信號測向,機載對海(地)面目標測向等。
2.1 一維相位干涉儀測向原理
圖1是一維干涉儀原理圖。其中圖1(a)為一維單基線相位干涉儀原理,圖1(b)為一維多基線相位干涉儀原理[4]。
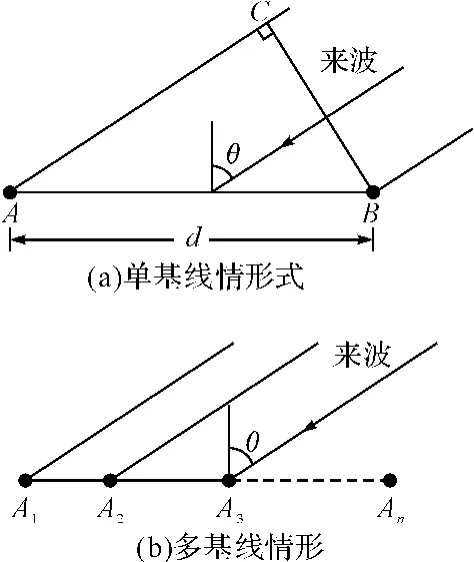
圖1 一維相位干涉儀測向原理
“一維”是指測向天線為“線型”布陣,即所有的測向天線陣元都處于同一條直線上,一維相位干涉儀測向公式為

式中,φ為A-B基線相位差;d為基線長度;θ為來波方位角;λ為來波波長。
由于干涉儀測量的相位差(測量值)只能在±180°范圍內,由式(1)可知,當基線長d<λ/2時,對于任一方向入射波,基線實際相位差(實際值)在±180°以內,測量值反映實際值;當基線長d>λ/2時,對某方向入射波基線相位差實際值可能超過±180°的范圍,但測量值只能在±180°范圍內,此時從測量值推算實際值時就存在若干個可能,這就是“相位模糊”。所以基線長度d必須小于λ/2,否則會引起示向多值,即不能保證實際示向與相位差的一一對應,也就是說,一個測定的φ,可以計算出兩個或兩個以上的示向度,這當然是不允許的。然而,對基線長度的限制卻制約著測向準確度的提高。為了解決這個矛盾,一般采用長短基線結合的辦法。對于某個工作頻率,多基線相位干涉儀中既有“長基線”也有“短基線”。盡管“長基線”存在相位多值,但利用相位單值的“短基線”相位,可解算出“長基線”的實際相位的精確值,這個過程稱為“解相位模糊”。當最長基線長度越長時,解相位模糊所需輔助天線元的數量就越多,此時系統的測向精度越高。
一維相位干涉儀測向存在的缺陷[5]:
1)一維相位干涉儀測向的測向方位角范圍只能為[-90°,+90°],存在無法區分前后方的缺點,即前后方來波以相同的夾角入射到基線形成的基線相位差無區別(由sinθ的對稱性也可以看出)。
如圖2所示,當同一頻率電波分別從前方和后方以相同的夾角入射到基線時,可以得出電波到達A0-A1基線相位差均為2π·d·sinθ/λ,但是來波的方位角卻分別為θ和180°-θ,所以一維相位干涉儀無法區分前方與后方。

圖2 前后來波示意圖
2)一維相位干涉儀測向僅適合于來波入射方向與基線不存在仰角的測向場合。式(1)中僅針對仰角等于零的情形,如果存在仰角,則等式(1)不成立,如仍沿用此式計算方位角,會引起額外的測向誤差。
因此,一維相位干涉儀不適合以下來波有仰角的測向場合:機載測向、地對空目標測向和短波天波測向。
2.2 二維相位干涉儀測向原理
本文只研究二維單基線相位干涉儀,如圖3所示,以直角三角形頂點布陣等長基線的三元陣為例,x、y、z軸構成右手直角坐標系xyz,x軸上的A0-A1基線、y軸上的A0-A2基線長度都為d。
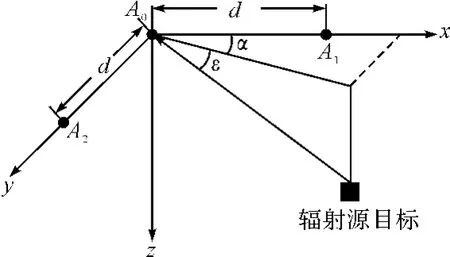
圖3 二維單基線相位干涉儀測向原理示意圖
則測向公式如下:

式中,φ1為A0-A1基線相位差;φ2為A0-A2基線相位差;d為基線長度;α為來波方位角;ε為來波仰角;λ為來波波長。
對于同樣長度的基線比較式(1)與式(2)、式(3)可知,基線相位差還與仰角有關。因此,對有仰角的來波進行測向時,一維相位干涉儀的基線相位差還會因仰角不同而呈現出多值性,從而造成另外一種相位模糊,而二維相位干涉儀則不存在這種相位模糊。
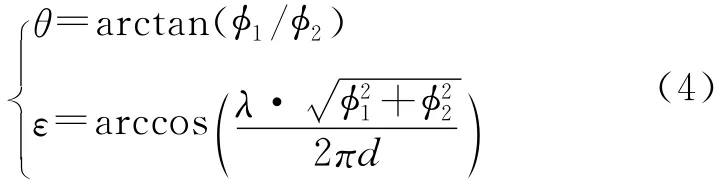
從式(2)和式(3)可以求出來波入射方位角θ和來波入射仰角ε[6]:
二維單基線相位干涉儀與一維相比,具有以下優點:
1)二維相位干涉儀可360°全方位測向,而一維相位干涉儀只能180°測向;
2)與一維相位干涉儀相同,當d<λ/2時,基線相位差不會超出[-π,π]范圍,無相位多值,可得到真實來波方向;當d>λ/2時,存在相位多值,造成測向多值;
3)一維相位干涉儀只能測方位,且存在因仰角引起的相位模糊;而二維相位干涉儀可同時測方位與仰角,不存在因仰角引起的相位模糊;
4)在d<λ/2條件下,基線長度越長,測向精度越高。
3 艦載無人機無源測向精度
相位干涉儀是艦載無人機實施電子偵察的核心設備,從某種意義上說,干涉儀的測向性能決定了艦載無人機對輻射源的測向性能。從干涉儀工作原理的角度,分析影響干涉儀對輻射源測向精度的因素主要包括:測頻誤差、測相誤差、基線測量誤差。
對式(1)中的φ、d、λ分別對θ求微分得:
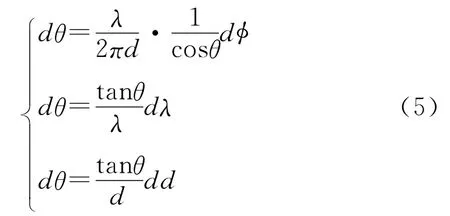
將測相誤差、測頻誤差、測基線長度誤差對測向誤差的影響用標準差[7]可表示為
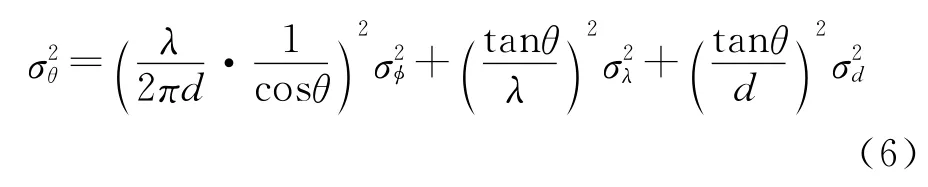
式中,σθ為決定θ時的標準偏差;σφ是測量相位差φ的標準偏差;σλ是測量電磁波波長(或頻率)λ的標準偏差;σd是測量基線長度d的標準偏差。
在式(6)中,主要的誤差來源是右邊第一項。誤差大小與θ有關,與cosθ成反比。在θ=0°(視軸方向)時誤差最小,在接近θ=90°(基線方向)時誤差非常大,已無法進行正常的測向。因此,通常將單基線的測角范圍限制在±60°,甚至更窄。在作戰使用中,應根據電子偵察設備的設計特點正確使用。
第七種是利潤效應。創新效益是企業追求的最終目標,如果能取得較好的利潤和回報,就會形成良性循環。創新速度的提高最終能夠為企業帶來豐厚的利潤回報。⑤
測頻精度對測量誤差的影響是微乎其微的,通常可以忽略。測向誤差主要取決于相位誤差和基線長度。為了獲得高的測量精度,必須有長基線。測向精度可以通過犧牲時間來換取,即通過多次平均來提高相位測量精度。經M次平均后的測量相位差的標準偏差σφ為原來的倍。
4 影響艦載無人機測向精度的因素
對輻射源的定位是艦載無人機電子偵察載荷的主要任務之一,而測向精度對定位精度有著決定性的影響,高精度的定位必然要求高精度的測向,同時方位數據也是偵察監視、輻射源目標識別,對信號進行分選識別的重要參數之一。
從干涉儀測向原理的角度來看,干涉儀測角誤差由測相誤差、測頻誤差、基線測量誤差等組成。從載機的角度來看,測向系統與艦載無人機剛性連接,艦載無人機在執行偵察任務時,其位置和姿態數據都在不斷變化,所以相對于靜止平臺的測向系統,機載電子偵察測向系統的誤差源更多。除了電子偵察設備自身的內在因素外,機載電子偵察測向性能還受其他許多因素的影響,主要包括以下幾個方面:
1)系統安裝誤差
艦載無人機根據作戰任務進行載荷的掛載,每次掛載時都會產生系統的安裝誤差。系統的安裝誤差屬于固定數值的系統誤差,該誤差可在系統安裝后或系統工作前進行校準,校準誤差主要受校準時所選用的校準輻射源頻率精度、系統測相精度影響,最終系統安裝誤差對測向誤差的影響與校準后的剩余誤差有關。
2)數據處理誤差
測向系統在數據處理中,由于計算過程包含近似數的取舍、基線長度的近似等,由此也必然引入一定的系統測向誤差。
3)飛行環境的影響
4)載體平臺基準誤差
載體平臺基準誤差包括平臺位置、姿態的測量誤差。實時測向過程中,將測量坐標系下測量結果轉換到慣性坐標系下的計算過程需要引入平臺位置參數、平臺姿態參數,這些參數的引入不可避免地會引起最終的系統測向誤差。
艦載無人機在偵察飛行過程中,其飛行姿態的變化受兩個主要因素的影響:一是大氣環境擾動的影響,這種影響是隨機的;二是艦載無人機需要根據戰場態勢的變化進行機動,在機動飛行過程中,無人機的飛行姿態將發生改變。
相位干涉儀測向體制是通過測量基線兩端天線入射波的相位差來計算入射波方向的。對同一方向的入射波,基線法線方向的偏差、基線兩端天線相對位置的變化都會造成基線兩端天線測量相位差的變化,因此測量出來的方位角就會與入射波真實方向有差異。機載相差測向系統因無人機的飛行姿態不同,使得基線法線發生傾斜,使測量基線天線入射波的相位差發生變化,從而引起測向誤差。
無人機飛行姿態可以用橫滾角γ、俯仰角τ、航向角ψ表示。為了描述方便,不失一般性,下面以二維單基線測向系統為例,就無人機飛行姿態對測向精度的影響做深入分析。
雙基線機載相差測向系統主要由兩組天線組成,形成機首尾AB和機翼CD兩基線。相鄰基線法線之間夾角為90°,對任一方向入射波,測向精度取決于與入射波夾角|θ|≤45°的法線所對應基線測向精度。如圖4。

圖4 艦載無人機飛行姿態對測向精度影響分析示意圖
如以機首為0°,則當入射波介于0°~45°、135°~225°、315°~360°時,測向精度由機翼C、D天線基線決定;當入射波介于45°~135°、225°~315°時,測向精度由機首A、B天線基線決定,這樣就形成了360°全方位測向,下面分別進行分析。
1)飛行姿態對首尾天線測向精度的影響
設無人機姿態為γ≠0、τ=0、ψ=0,則無人機機翼發生傾斜,機首尾A、B天線的基線保持水平狀態,但其基線法線將隨無人機傾斜而發生垂直傾斜,如圖5所示。
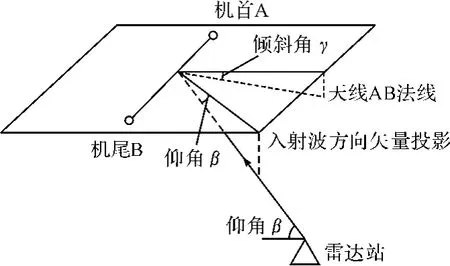
圖5 橫滾角對首尾天線測向精度影響分析示意圖
可以近似地把橫滾角γ看作無人機對目標輻射源的俯視角β(或稱為目標輻射源的仰角或來波仰角)的變化,即:β1=β-γ,β1為無人機產生橫滾角γ時來波相對仰角,AB基線的法線向輻射源方向傾斜時γ為正。設目標輻射源信號的實際方位入射角為θ,無人機實際測出的方位入射角為θ′,由式(2)可知:

則

無人機橫滾角γ引起的測向角誤差值Δθ為
Δθ=|θ′-θ|=|arcsin[sinθcos(β-γ)]-θ|(9)
假設無人機作勻速圓周運動,來波仰角β=11.3°,當入射波在首尾AB基線法線兩側45°范圍,即|θ|≤45°時,對于不同的方位入射角θ和不同的無人機橫滾角γ,由式(8)可得不同的測向誤差Δθ如表1所示。
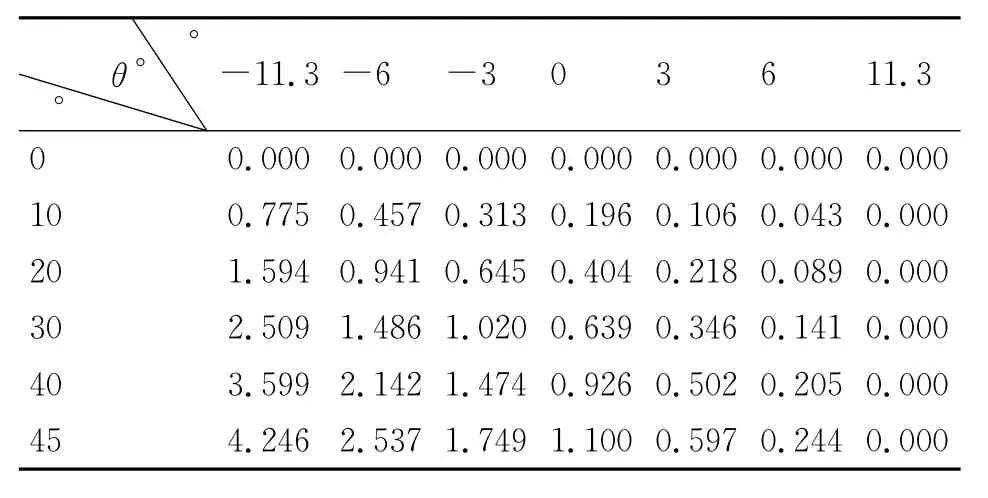
表1 艦載無人機首尾天線測向誤差分析表
可以看出:
(1)對于一定的β、γ角,測向誤差與方位角θ大小有關。在γ≠β時,θ越大測向誤差越大,當θ=0°時,Δθ=0°,測向誤差最小,相差測向在天線基線的法線方向上方位測量精度最高;
(2)對于一定的β、θ角,測向誤差與β-γ值大小有關。當天線法線偏向輻源方向時,γ為正,βγ減小,測向誤差減小;當β=γ時,測向誤差Δθ=0°,測向誤差最小;反之,當天線法線偏離輻射源方向時,γ為負,β-γ增大,測向誤差增大。
2)飛行姿態對兩側天線測向精度的影響
對于基線CD來說,如圖6所示,其法線方向不變,但天線C、D相對位置發生變化,使得基線發生傾斜。
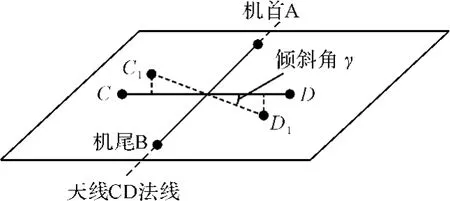
圖6 橫滾角對兩側天線測向精度影響分析示意圖
設無人機傾斜后基線CD的相對長度為d′。

將式(10)帶入式(2)得:

設目標輻射源信號的實際方位入射角為θ,無人機實際測出的方位入射角為θ′,由式(2)可知:

無人機橫滾角γ引起的測向誤差值Δθ為
Δθ=|θ′-θ|=|arcsin(sinθcosβcosγ)-θ|(13)
假設無人機作勻速圓周運動,來波仰角β=11.3°,當入射波在機翼CD基線法線兩側45°范圍,即|θ|≤45°時,對于不同的方位入射角θ和不同的橫滾角γ,由式(13)可得不同的測向誤差如表2所示。
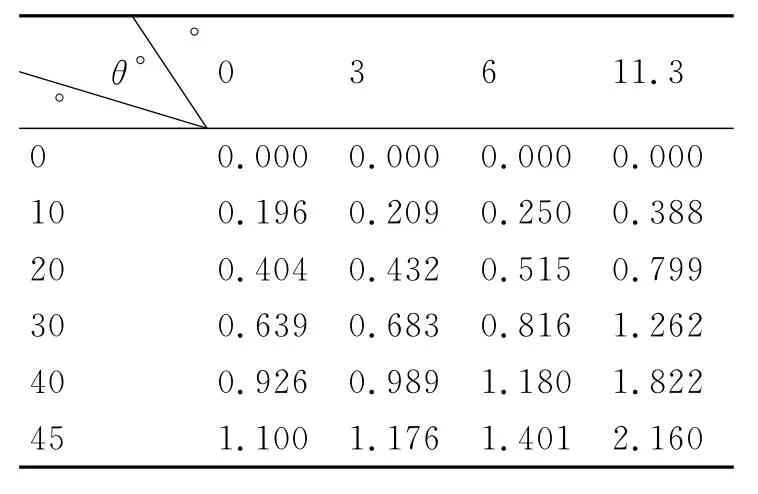
表2 艦載無人機兩側天線測向誤差分析表
可以看出:
(1)當β、γ一定時,測向誤差與方位角θ的大小有關,θ越大測向誤差越大,當θ=0°時,Δθ=0°,測向誤差最小,相差測向在天線基線的法線方向上方位測量精度最高;
(2)當方位角θ一定時,因無人機橫滾角γ產生的測向誤差與γ大小有關,與法線傾斜方向無關,橫滾角γ越大,測向誤差越大。
當無人機姿態為γ=0、τ≠0、ψ=0時,由于τ≠0對測向精度影響的分析,與γ≠0時的分析相似,這里不再贅述。
無人機姿態角變化對測向精度的影響與測向天線的形狀以及測向天線在無人機上安裝部位的不同而不同。以上分析只是一種特例,但其結論對于指導無人機在測向過程中的飛行方法具有重要意義。
5 結語
通過上述分析,艦載無人機在進行無源測向過程中,應注意:
1)艦載無人機在測向過程中,應盡量保持平穩飛行,避免因姿態角的不穩定變化產生新的測向誤差;
2)艦載無人機在測向過程中,如需要改變航向,應向目標方向轉向,避免背向目標轉向。
3)艦載無人機在測向過程中,應盡量保持等高飛行,避免爬升或降高飛行。
4)對安裝于機身兩側,采用一維多基線相位干涉儀體制測向天線的艦載無人機,在測向過程中,應始終保持航向線與目標方位線接近于垂直。
艦載無人機在測向飛行過程中,如需要改變航向,應向目標方向轉向,避免背向目標轉向。由于不同的傾斜角度對應著不同的測向精度,而不同的飛行圓周半徑和飛行速度對應著不同的傾斜角度,因此,無人機進行測向飛行時,如需轉向,在不改變飛行速度的情況下,要充分考慮不同的傾斜角度對相差測向精度產生的影響,對艦載無人機進行合理的操控。
[1]孫仲康,等.單/多基地有源無源定位技術[M].北京:國防工業出版社,1996.
[2]譚安勝.水面艦艇編隊作戰運籌分析[M].北京:國防工業出版社,2009.
[3]華陽.電子偵察無人機單站無源定位研究[J].艦船電子對抗,2009,32(2):14-17.
[4]范秋虎,張部生,王天寶,等.基于無人機編隊提高干涉儀測向性能[J].電子測量技術,2013,36(7):27-30.
[5]范秋虎,張部生,王天寶,等.基于無人機編隊提高干涉儀測向性能[J].電子測量技術,2013,36(7):27-30.
[6]季曉光,高曉光.一種機載無源定位方法——干涉儀定位[J].火力與指揮控制,2008,33(11):158-161.
[7]袁孝康.相位干涉儀測向定位研究[J].上海航天,1999(3):1-7.
The Influence of Flight Attitude of Shipborne UAV on Passive Direction FindingPrecision
WANG Ziyu1ZHU Qingsong2
(
1.No.92941Troops of PLA,Huludao 125001)(2.Dalian Navy Academy,Dalian 116018)
In view of Shipborne UAV using electronic reconnaissance load on the direction finding problem,passive direction finding principle of Shipborne UAV is analyzed,and calculation model of passive direction finding precision is established,and the major sources of error are discussed,and controlling require of flight attitude when passive direction finding is given by simulation.The paper provides theory and method of passive direction finding of shipborne UAV for destroyer and frigate formation.
shipborne UAV,passive direction finding,flight attitude
V249.1DOI:10.3969/j.issn.1672-9730.2015.11.016
2015年5月8日,
2015年6月24日
王梓宇,男,研究方向:艦載武器作戰使用、武器試驗。朱青松,男,碩士研究生,研究方向:軍事運籌、艦載武器作戰使用。