外輻射源雷達旋轉陣列校正算法
2015-06-05 15:31:24龔子平萬顯榮
系統工程與電子技術 2015年11期
關鍵詞:信號
方 亮,龔子平,萬顯榮,方 高,程 豐
(武漢大學電子信息學院,湖北武漢430072)
外輻射源雷達旋轉陣列校正算法
方 亮,龔子平,萬顯榮,方 高,程 豐
(武漢大學電子信息學院,湖北武漢430072)
外輻射源雷達面臨嚴重的多徑干擾,但強多徑信號也為陣列校正提供了優良的信號源,針對此提出了一種利用最強徑信號的旋轉陣列校正算法。該算法首先采用時域相關運算分離出最強徑信號,然后通過旋轉陣列來增加信號源和提供先驗信息,接著利用比幅原理估計出陣列幅度誤差,最后結合最大似然(maximum likelihood,ML)算法和最小二乘(least square,LS)算法估計出最強徑信號到達角和陣列相位誤差。分析了所提算法的適用條件,并推導了最強徑信號到達角和陣列相位誤差估計的克拉美-羅下界(Cramer-Rao lower bound,CRLB)。仿真和實測數據處理結果驗證了該算法的有效性。
外輻射源雷達;陣列校正;最大似然算法;陣列旋轉
0 引 言
近年來,外輻射源雷達若干關鍵技術一直是雷達界的研究熱點[1]。國內外學者的研究主要集中在:多徑雜波抑制[24]、目標檢測[5-7]、目標跟蹤[810]、成像[1113]和優化布站[1415]等方面,但少有關于外輻射源雷達陣列校正問題的研究報道。通常采用的輔助信號源的陣列校正方案,包括遠場校正和近場校正。其中遠場校正將輔助信號源置于天線前方足夠遠的開闊場地發射校正信號,通過測量各接收通道的輸出,扣除陣列空間位置引起的相位差,得到陣列誤差信息。不足之處在于:輔助信號源的放置和維護比較麻煩,且難以做到實時校正;此外,當輔助信號源方位信息出現偏差時會給校正帶來系統誤差。相比之下,近場校正將輔助信號源置于天線陣附近,使得輔助信號源的放置和維護相對容易,且能夠實現實時校正,但是天線陣列近場電磁環境復雜,校正信號回波不是理論上的球面波,使得應扣除的空間相位差不能根據簡單的幾何關系計算,導致該方法的校準精度較差。
為克服輔助信號源的限制,本文結合外輻射源雷達多徑干擾嚴重的特點,提出了利用強多徑回波校正陣列的新方法。該方法利用機會照射源信號的強自相關性,采用時域相關運算分離多徑,選用最強徑信號作為校正信號源,以滿足校正信號源高信噪比(signal-to-noise ratio,SNR)的要求。在理想條件下,最強徑信號為直達波信號,其到達角可根據收發站的幾何關系直接計算出;然而由于實際傳播(如單頻網配置下城市環境中的多徑傳播)的復雜性,可能導致直達波被固定建筑物遮擋,使得最強徑信號的方位未知。
針對校正信號源方位未知時陣列誤差估計的問題,國內外學者提出了多種有效的方法[1618]。文獻[16]利用均勻線陣接收信號協方差矩陣的Toeplitz特性求解陣列誤差,但求解存在模糊,必須添加相應的限制條件;文獻[17]利用噪聲子空間與信號子空間的正交性,構造代價函數,通過迭代運算求得校正信號源方位和陣列誤差,但對于均勻線陣,該方法的解也存在模糊;文獻[18]利用多個在時間或頻譜上不重疊的未知方位回波信號,通過最大似然(maximum likelihood,ML)估計陣列誤差,但要求陣列為非直線陣。
由于均勻線陣導向矢量的范德蒙特性,以上方法應用于均勻線陣均會導致解存在模糊,然而均勻線陣因其結構和信號處理簡單被廣泛應用于外輻射源雷達,為解決該陣列的校正,本文提出通過旋轉陣列來增加信號源和提供先驗信息(即旋轉角度),利用比幅原理估計出陣列幅度誤差,并結合ML算法和最小二乘(least square,LS)算法估計出最強徑信號到達角和陣列相位誤差。
本文首先建立了相應的信號模型,接著闡述了所提陣列誤差估計算法的原理,分析了其適用條件,推導了最強徑信號到達角和陣列相位誤差估計的克拉美-羅下界(Cramer-Rao lower bound,CRLB),然后通過仿真和實測數據處理驗證了該算法的性能,最后給出了結論。
1 信號模型
本文假定機會照射源為數字電視廣播,如中國移動多媒體廣播(China mobile multimedia broadcasting,CMMB)[19]、數字電視地面廣播(digital television terrestrial broadcasting,DTTB)[20]等,其一般采用正交頻分復用(orthogonal frequency division multiplexing,OFDM)調制,不失一般性,經信號重構[21]獲得的參考信號可表示為

式中,b為OFDM符號序號;k為子載波序號;NS為OFDM符號子載波數;Xb(k)為第b個OFDM符號中第k個子載波調制的經星座映射后的復數據。



假定接收陣列為均勻線陣,陣元數為M,陣元間距d=λ/2,其中λ為波長,各陣元為全向天線。本文只考慮陣列幅相誤差,不考慮陣列互耦和位置誤差,假設幅度誤差為gi,相位誤差為,其中i=1,2,…,M為陣元序號,以陣元1為基準,則g1=1,φ1=0。如圖1所示,將陣列分別順時針旋轉兩次,那么陣元i對應于符號b的最強徑譜點輸出為

式中,θ為最強徑的到達角;θr為旋轉角度,其中r=0,1,2,θ0=0;(b)為噪聲。假設(b)滿足:①不同陣元的噪聲譜相互獨立;②不同時刻的噪聲譜相互獨立;③不同旋轉角度位置的噪聲譜相互獨立;④噪聲為具有相同方差σ2的零均值高斯分布隨機變量。
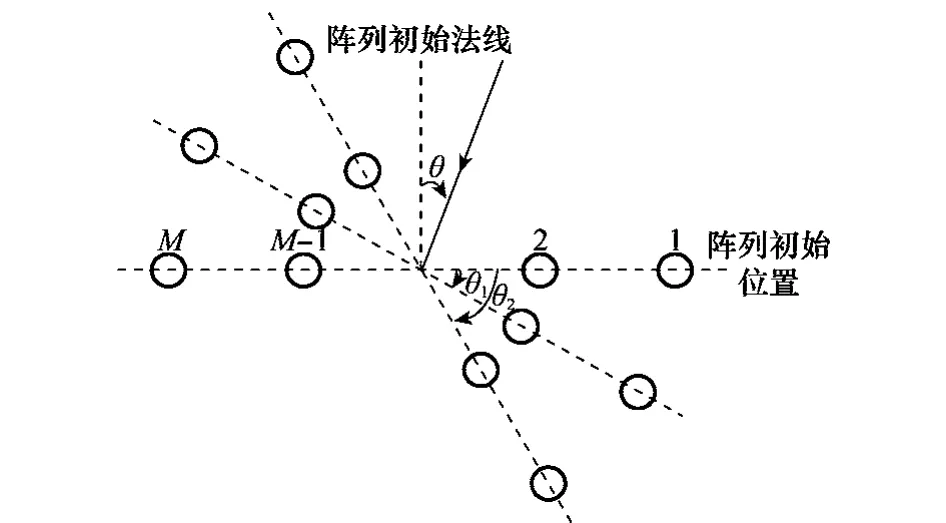
圖1 陣列旋轉示意圖
2 校正算法
2.1 算法原理
2.1.1 陣列幅度誤差估計
則

通過共軛相乘抵消相位,則


2.1.2 陣列相位誤差估計
首先利用求得的陣列幅度誤差估計^gi對幅度進行校正,則


定義陣列相位誤差矩陣

方向向量矩陣

則

式中
diag[a]表示將向量a轉變成對角陣。
假設θ已知的情況下,利用LS算法求解陣列誤差矩陣

將式(11)代入式(10),則

式中


2.2 適用條件
利用AH(θ)A(θ)=3IM獲得的解析表達
即分別最大化

均可通過傅里葉譜分析完成,而同時滿足這3個最大化使解存在且唯一。
同理,當陣列只旋轉一次時,式(14)變為

此時該問題會存在兩個相等的極大值,導致解存在模糊。為克服該模糊,陣列至少旋轉兩次。
同理,當利用額外的多徑信號源時,式(14)變為


式中,θa為額外的待估計多徑信號到達角。可見增加可用的多徑信號源不影響該問題的解,所以只需選用最強徑信號作為校正源。
2.3 克拉美-羅下界
定義

那么相應的似然函數為

取對數,則

式中

定義矩陣

那么Fisher信息矩陣為

式中
最終得到CRLB,即

3 性能仿真
為評估算法的性能,本文首先通過計算機數值仿真分別研究了最強徑SNR、陣元個數、陣元序號、旋轉角度大小、旋轉角度誤差對陣列幅相誤差和最強徑到達角估計精度的影響。本仿真基本設置如圖1所示,其中機會照射源選用數字電視廣播,接收陣列為均勻線陣,陣元數為M,陣元間距d=λ/2,陣列分別順時針旋轉角度θ1和θ2,最強徑信號到達角為θ。
3.1 最強徑SNR的影響
實驗設置如下:
(1)陣元個數:M=8;
(3)最強徑信號到達角:θ=5°;
(4)陣列旋轉角度:θ1=10°,θ2=20°;
(5)蒙特卡羅實驗次數:100。
最強徑SNR對估計精度的影響如圖2所示。從圖中可以看出,陣列幅相誤差和最強徑到達角的估計精度都隨著最強徑SNR的增加而提高,當最強徑SNR達到20 dB時,陣列幅度均方根誤差(root mean square error,RMSE)降到10-4,陣列相位RMSE低于1°,最強徑到達角RMSE低于0.05°,此時RMSE非常接近CRLB。在實際場景中,最強徑SNR一般高于20 dB,可使陣列幅相誤差估計達到較高的精度。

圖2 最強徑SNR對估計精度的影響
3.2 陣元個數的影響
實驗設置如下:
(2)最強徑信號到達角:θ=5°;
(3)陣列旋轉角度:θ1=10°,θ2=20°;
(4)最強徑SNR=10 d B;
(5)蒙特卡羅實驗次數:100。
陣元個數對估計精度的影響如圖3所示。從圖中可以看出,陣元個數對陣列幅度誤差估計精度基本沒有影響,對陣列相位誤差和最強徑到達角估計精度影響很小。這表明,在實際場景中,利用較少的陣元個數也可達到較高的陣列幅相誤差估計精度。
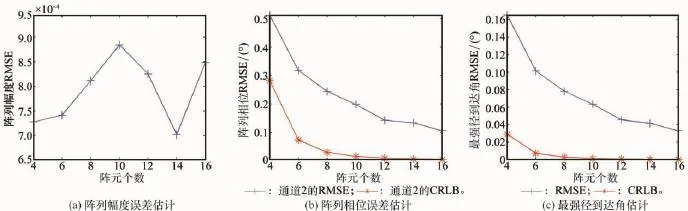
圖3 陣元個數對估計精度的影響
3.3 陣元序號的影響
實驗設置如下:
(1)陣元個數M=8;
(3)最強徑信號到達角:θ=5°;
(4)陣列旋轉角度:θ1=10°,θ2=20°;
(5)最強徑SNR=10 dB;
(6)蒙特卡羅實驗次數:100。
陣元序號對估計精度的影響如圖4所示。從圖中可以看出,隨著陣元與陣元1(基準陣元)距離增加,陣列幅相誤差估計精度會有所下降。

圖4 陣元序號對估計精度的影響
3.4 旋轉角度大小的影響
實驗設置如下:
(1)陣元個數M=8;
(3)最強徑信號到達角:θ=5°;
(4)陣列旋轉角度:θ2=2θ1;
(5)最強徑SNR=10 dB;
(6)蒙特卡羅實驗次數:100。
旋轉角度大小對估計精度的影響如圖5所示。從圖中可以看出,旋轉角度大小對陣列幅度誤差估計精度幾乎沒有影響,對陣列相位誤差和最強徑到達角估計誤差影響很小,總的趨勢是,隨著旋轉角度增大,估計精度會有所提高。在實際場景中,旋轉較小的角度也可實現較高的陣列相位誤差估計精度,利于工程實現。

圖5 旋轉角度大小對估計精度的影響
3.5 旋轉角度誤差的影響
實驗設置如下:
(1)陣元個數M=8;
(3)最強徑信號到達角:θ=5°;
(4)陣列旋轉角度:θ1=(10+δθ)°,θ2=(20+δθ)°;
(5)最強徑SNR=10 dB;
(6)蒙特卡羅實驗次數:100。
旋轉角度誤差對估計精度影響如圖6所示。從圖中可以看出,旋轉角度誤差對陣列幅度誤差估計精度基本沒有影響,但對陣列相位誤差和最強徑到達角估計精度有較大的影響,為保證估計精度,旋轉角度誤差應控制在0.1°以內。在實際場景中,可通過高精度的轉盤實現陣列旋轉。

圖6 旋轉角度誤差對估計精度的影響
4 實測數據處理
近年來,武漢大學研制出了基于數字電視廣播信號的外輻射源雷達系統。利用該系統實測數據來驗證所提算法,其中陣列布置如圖1所示,陣列為均勻線陣,陣元數為8,陣元間距為0.2 m,陣列置于轉盤上,順時針旋轉兩次,其旋轉角度分別為10°和20°。同時,本文結合輔助信號源來校正陣列,以比對校正值。實測數據處理結果如圖7所示。其中圖7(a)和圖7(b)比對了旋轉陣列校正和輔助信源校正的幅相校正值,可見兩種方法的幅相校正值基本一致,表明本文所提算法是有效的。圖7(c)為最強徑校正前后的多重信號分類(multiple signal classification,MUSIC)譜,校正前最強徑譜峰不明顯,經本文算法校正后其譜峰明顯突出且尖銳,再次驗證了其有效性。

圖7 實測數據處理結果
5 結 論
本文提出了一種外輻射源雷達陣列校正算法,該算法利用最強徑信號作為校正源,通過旋轉陣列克服了線陣的解模糊;而且其運算量小,只需要參數的一維搜索,不存在參數聯合估計的局部收斂問題。與輔助信號源的校正方法相比,本文方法擺脫了輔助信號源的限制,只需旋轉兩次陣列,簡單易行。需要說明的是,雖然本文重點以數字電視廣播外輻射源雷達為例來驗證所提算法的有效性,但所提算法同樣適用于其他體制外輻射源雷達。
[1]Wan X R.An overview on development of passive radar based on the low frequency band digital broadcasting and TV signals[J].Journal of Radars,2012,1(2):109- 123.(萬顯榮.基于低頻段數字廣播電視信號的外輻射源雷達發展現狀與趨勢[J].雷達學報,2012,1(2):109- 123.)
[2]Demissie B.Clutter cancellation in passive radar using GSM broadcast channels[J].IET Radar,Sonar and Navigation,2014,8(7):787- 796.
[3]Tan D K P,Lesturgie M,Sun H B,et al.Space-time interference analysis and suppression for airborne passive radar using transmissions of opportunity[J].IET Radar,Sonar and Navigation,2014,8(2):142- 152.
[4]Wang H T,Wang J,Liu Y C.Interference suppression for GSM based PBR using two-step spatial filtering[J].Systems Engineering and Electronics,2013,35(4):740- 744.(王海濤,王俊,劉玉春.基于兩步空域濾波的GSM輻射源雷達干擾抑制[J].系統工程與電子技術,2013,35(4):740- 744.)
[5]Howard S D,Sirianunpiboon S.Passive radar detection using multiple transmitters[C]∥Proc.of the Asilomar Conference on Signals,Systems and Computers,2013:945- 948.
[6]Malanowski M.Detection and parameter estimation of manoeuvring targets with passive bistatic radar[J].IET Radar,Sonar and Navigation,2012,6(8):739- 745.
[7]Wang H T,Wang J,Duan F.Target detection for CDMA based passive radar using array antenna[J].Systems Engineering and Electronics,2012,34(2):282- 286.(王海濤,王俊,端峰.利用陣列天線的CDMA輻射源雷達目標檢測方法[J].系統工程與電子技術,2012,34(2):282- 286.)
[8]Choi S,Crouse D F,Willett P,et al.Approaches to Cartesian data association passive radar tracking in a DAB/DVB network[J].IEEE Trans.on Aerospace and Electronic Systems,2014,50(1):649- 663.
[9]Brotje M,Nickel U.Data ambiguity in passive radar tracking[C]∥Proc.of the International Radar Symposium,2013:349- 354.
[10]Klein M,Millet N.Multireceiver passive radar tracking[J].IEEE Trans.on Aerospace and Electronic Systems,2012,27(10):26- 36.
[11]Garry J L,Baker C J,Smith G E,et al.Investigations toward multistatic passive radar imaging[C]∥Proc.of the IEEE Radar Conference,2014:607- 612.
[12]Antoniou M,Zhou H,Zeng Z F,et al.Passive bistatic synthetic aperture radar imaging with Galileo transmitters and a moving receiver:experimental demonstration[J].IET Radar,Sonar and Navigation,2013,7(9):985- 993.
[13]Wang S,Tang Y H,Liu C C,et al.Sparse passive radar imaging based on FM station using the U-ESPRIT for moving target[C]∥Proc.of the IET International Radar Conference,2013:1- 6.
[14]Gumiero F,Santarelli S,Bongioanni C,et al.Using real data for the implementation of multistatic passive radar geometry optimization procedure[C]∥Proc.of the European Radar Conference,2011:93- 96.
[15]Isohookana M,Pyykonen J.Design of a passive radar network[C]∥Proc.of the European Radar Conference,2010:443- 446.
[16]Wylie M P,Roy S,Messer H.Joint DOA estimation and phase calibration of linear equispaced(LES)arrays[J].IEEE Trans. on Signal Processing,1994,42(12):3449- 3459.
[17]Weiss A J,Friedlander B.Eigenstructure methods for direction finding with sensor gain and phase uncertainties[J].Circuits Systems Signal Process,1990,9(3):271- 300.
[18]Rockah Y,Messer H,Schultheiss P M.Localization performance of arrays subject to phase errors[J].IEEE Trans.on Aerospace and Electronic Systems,1988,24(4):402- 410.
[19]GY/T 220.1- 2006.Mobile multimedia broadcasting part 1:framing structure,channel coding and modulation for broadcasting channel[S].China mobile multimedia broadcasting standard,2006.(GY/T 220.1- 2006.移動多媒體廣播第l部分:廣播信道幀結構、信道編碼和調制[S].中國移動多媒體標準,2006.)
[20]GB 20600- 2006.Framing structure,channel coding and modulation for digital television terrestrial broadcasting system[S].Chinese National Standard,2006.(GB 20600- 2006.數字電視地面廣播傳輸系統幀結構,信道編碼和調制[S].中國國家標準,2006.)
[21]Baczyk M K,Malanowski M.Reconstruction of reference signal in DVB-T-based passive radar[J].International Journal of Electronics and Telecommunications,2011,57(1):43- 48.
方 亮(198-6- ),男,博士研究生,主要研究方向為雷達系統與信號處理。
E-mail:fangliang198612@126.com
龔子平(197-7- ),男,講師,博士,主要研究方向為電波傳播與無線電海洋遙感。
E-mail:zpgong@whu.edu.cn
萬顯榮(197-5- ),男,教授,博士研究生導師,博士,主要研究方向為新體制雷達系統設計、陣列信號處理。
E-mail:xrwan@whu.edu.cn
方 高(198-9- ),男,博士研究生,主要研究方向為雷達系統與信號處理。
E-mail:fanggao55@whu.edu.cn
程 豐(197-2- ),男,副教授,碩士研究生導師,博士,主要研究方向為雷達信號處理、目標檢測與跟蹤。
E-mail:ryh@whu.edu.cn
Calibration algorithm using array rotation in passive radar
FANG Liang,GONG Zi-ping,WAN Xian-rong,FANG Gao,CHENG Feng
(School of Electronic Information,Wuhan University,Wuhan 430072,China)
Passive radar usually encounters aggravated multipath interferences,which nonetheless provide effective signal sources for array calibration.A novel approach for array calibration in passive radar is proposed,exploiting the strongest multipath signal and array rotation.Firstly,the time-domain correlation between the surveillance and reference signals is employed to extract the strongest multipath signal.And then,the array rotation which provides both additional calibration sources and priori knowledge about the rotating angle is utilized.Following that,the estimation of the array amplitude mismatch by comparison on amplitudes,the direction of arrival(DOA)of the strongest multipath signal and the array phase mismatch are finally estimated using the incorporation of maximum likelihood(ML)and least square(LS)algorithms.The applicable condition of the proposed approach is investigated,and the Cramer-Rao lower bound(CRLB)for DOA of the strongest multipath signal and the array phase mismatch is also derived.Numerical simulation and field data results demonstrate the behavior and effectiveness of the proposed algorithm.
passive radar;array calibration;maximum likelihood(ML)algorithm;array rotation
TN 958.97
A
10.3969/j.issn.1001-506X.2015.11.07
1001-506X(2015)11-2467-07
2014- 12- 11;
2015- 01- 27;網絡優先出版日期:2015- 03- 30。
網絡優先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20150330.0851.007.html
國家自然科學基金(61331012,61371197);國家基金委和民航總局聯合基金(U1333106,);教育部博士點基金(博導類)(20120141110077)資助課題
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06