基于辨識(shí)路面的礦用自卸車平順性優(yōu)化
2015-06-04 13:02:42朱一帆谷正氣
振動(dòng)與沖擊 2015年13期
朱一帆,谷正氣,2,張 沙
(1.湖南大學(xué) 汽車車身先進(jìn)設(shè)計(jì)制造國(guó)家重點(diǎn)實(shí)驗(yàn)室,長(zhǎng)沙 410082;2.湖南工業(yè)大學(xué),湖南 株洲 412007)
礦用自卸車是現(xiàn)代礦山的重要運(yùn)輸設(shè)備,屬于非公路車輛,其常年運(yùn)行在比較惡劣的礦山路面上,這對(duì)礦用自卸車的平順性能提出了較高的要求。
對(duì)于礦山車輛,路面不平度是汽車行駛時(shí)最主要的激勵(lì)[1],準(zhǔn)確路面信息的獲取是進(jìn)行車輛平順性和操縱穩(wěn)定性分析和評(píng)價(jià)的關(guān)鍵。近年來許多學(xué)者對(duì)路面不平度辨識(shí)進(jìn)行研究,Castelnovi等[2]利用激光反射識(shí)別路面,通過激光發(fā)射和接收時(shí)間差,計(jì)算出路面粗糙度;王亞等[3]提出兩種將單輪轍路面不平度時(shí)域模型拓展為雙輪轍路面不平度時(shí)域模型方法;高建等[4]通過車輪減速時(shí)滑移率識(shí)別路面;Wang等[5]等利用輪胎動(dòng)態(tài)壓力傳感器測(cè)量輪胎路面交互響應(yīng),對(duì)城市道路不平度進(jìn)行估計(jì);韓建保等[6]通過識(shí)別輪胎表面橡膠隨時(shí)間的變形來識(shí)別路面;Ngwangwa等[7]將人工神經(jīng)網(wǎng)絡(luò)方法應(yīng)用到路面不平度辨識(shí)問題中;Swart等[8]提出基于路面聲波反射識(shí)別路面的方法。針對(duì)礦區(qū)路面的特殊性,很多路面不平度識(shí)別方法存在一定難度或缺陷,無法在工程實(shí)際中運(yùn)用,因而需要進(jìn)一步的研究。
本文結(jié)合以上學(xué)者的研究成果,提出利用遺傳算法優(yōu)化的BP神經(jīng)網(wǎng)絡(luò)由易于測(cè)量的座椅加速度辨識(shí)礦山路面不平度的方法。建立礦用自卸車剛?cè)狁詈戏抡婺P停瑢⒎抡娴玫降淖渭铀俣茸鳛榫W(wǎng)絡(luò)理想輸入樣本,基于逆變換原理擬合出的路面不平度作為網(wǎng)絡(luò)理想輸出樣本,通過網(wǎng)絡(luò)訓(xùn)練,建立兩者之間非線性映射模型。在整車道路試驗(yàn)驗(yàn)證辨識(shí)結(jié)果合理的基礎(chǔ)上,利用多島遺傳算法對(duì)礦用自卸車油氣懸架和座椅結(jié)構(gòu)參數(shù)進(jìn)行不確定性優(yōu)化,平順性得以改善。
1 礦用自卸車剛?cè)狁詈夏P徒?/h2>
車架是礦用自卸車主要承載部分,其運(yùn)動(dòng)變形對(duì)自卸車整車性能評(píng)定影響很大,基于實(shí)際情況,進(jìn)行整車建模時(shí)將車架處理為柔性體[9]。
在Solidworks中建立車架三維模型,導(dǎo)入Hypermesh中對(duì)其進(jìn)行網(wǎng)格劃分,考慮到真實(shí)車架模型非常復(fù)雜,需進(jìn)行幾何簡(jiǎn)化,并采用殼單元對(duì)其進(jìn)行離散,設(shè)置不同的厚度值的單元屬性來替代車架各不同厚度的鋼板。車架各元件板厚主要為:筋板厚度為16mm,縱梁厚度為25mm,龍門梁厚度為30mm,車架吊耳厚度為50mm,與后牽引梁連接的縱梁以及前牽引梁厚度為45mm等。車架材料采用SUMITEN610F高強(qiáng)度低合金調(diào)質(zhì)鋼,具體參數(shù)如表1所示。
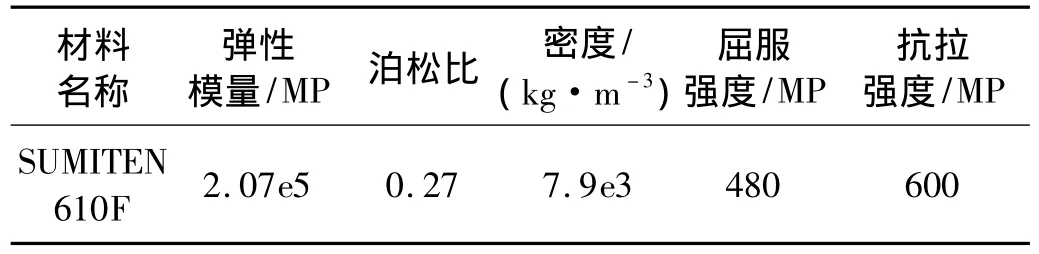
表1 車架材料參數(shù)Tab.1 Parameters of frame material
建立的車架有限元模型如圖1所示,其中以四邊形單元為主,但由于模型的復(fù)雜性,存在少量三角形單元進(jìn)行過渡。
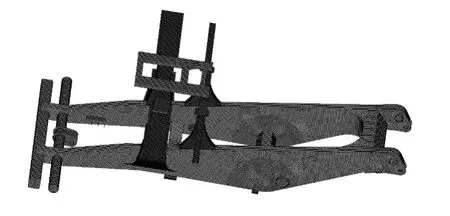
圖1 車架有限元模型Fig.1 Finite element model of the frame
以Hypermesh為求解器,得到模態(tài)中性文件,經(jīng)ADAMS處理即可生成柔性體車架。根據(jù)多體動(dòng)力學(xué)原理,在ADAMS軟件中建立自卸車其他系統(tǒng)模型,通過外部節(jié)點(diǎn)間接定義柔性車架與外部連接件的約束[10]。圖2為在 ADAMS中建立的整車剛?cè)狁詈夏P汀?/p>
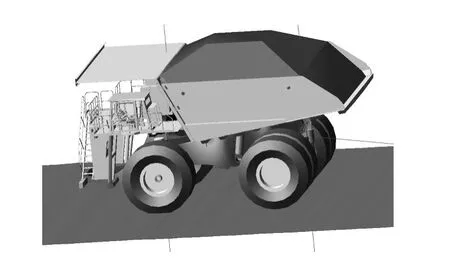
圖2 整車剛?cè)狁詈夏P虵ig.2 Rigid-flexible vehicle model
其中,通過四個(gè)Bushing模擬座椅懸架剛度和阻尼特性。輪胎型號(hào)為40.00R57,其剛度阻尼參數(shù)通過米其林公司提供的試驗(yàn)擬合數(shù)據(jù)獲取,將相關(guān)參數(shù)輸入編制的輪胎tir文件,最后導(dǎo)入動(dòng)力學(xué)模型。油氣懸架的非線性剛度和阻尼曲線在matlab中編程擬合生成,如圖3、圖4所示,然后由Spline曲線導(dǎo)入模型中。
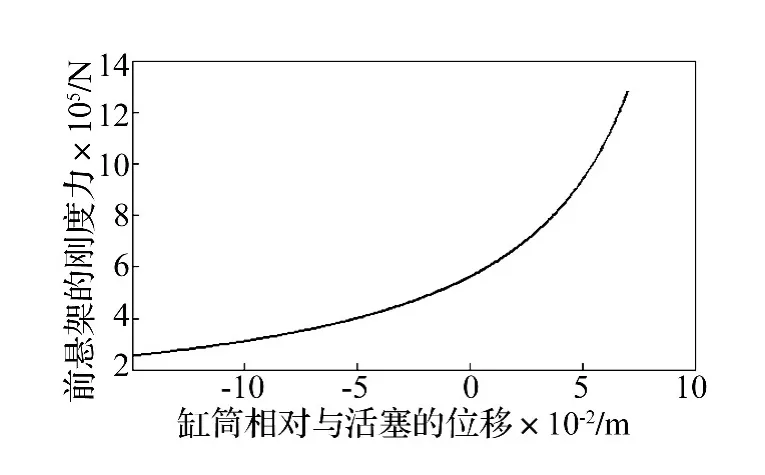
圖3 前懸剛度特性曲線Fig.3 Front suspension stiffness characteristic curve
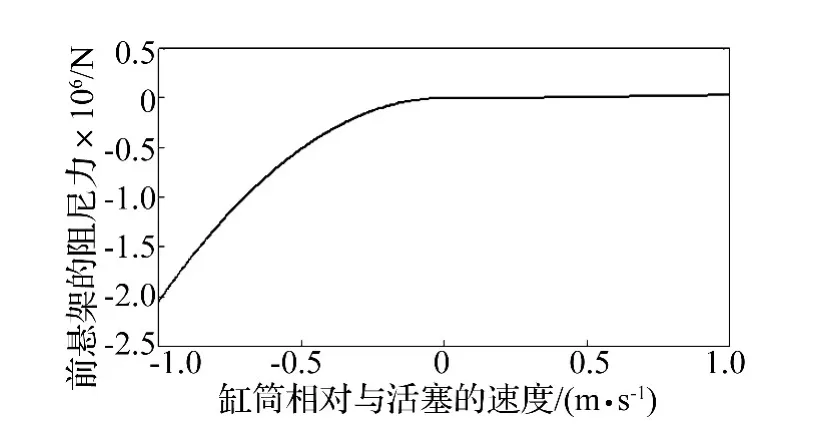
圖4 前懸阻尼特性曲線Fig.4 Front suspension damping characteristic curve
2 BP神經(jīng)網(wǎng)絡(luò)路面辨識(shí)模型
BP神經(jīng)網(wǎng)絡(luò)是一種多層前饋網(wǎng)絡(luò),可以實(shí)現(xiàn)從輸入到輸出的任意非線性映射,具有較強(qiáng)的學(xué)習(xí)能力和容錯(cuò)魯棒性[11]。對(duì)神經(jīng)網(wǎng)絡(luò)的設(shè)計(jì)主要包括網(wǎng)絡(luò)結(jié)構(gòu)模型設(shè)計(jì)、系統(tǒng)訓(xùn)練樣本集獲取、網(wǎng)絡(luò)訓(xùn)練與測(cè)試。
2.1 BP網(wǎng)絡(luò)結(jié)構(gòu)模型設(shè)計(jì)
神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)模型設(shè)計(jì)主要包括神經(jīng)網(wǎng)絡(luò)輸入?yún)?shù)、輸出參數(shù)、隱層數(shù)、隱層節(jié)點(diǎn)數(shù)以及網(wǎng)絡(luò)參數(shù)的確定等[12]。網(wǎng)絡(luò)結(jié)構(gòu)如圖 5 所示,h1m、h2n、h3q分別是神經(jīng)網(wǎng)絡(luò)的輸入層、隱含層和輸出層,xm為樣本輸入,yn為樣本輸出。
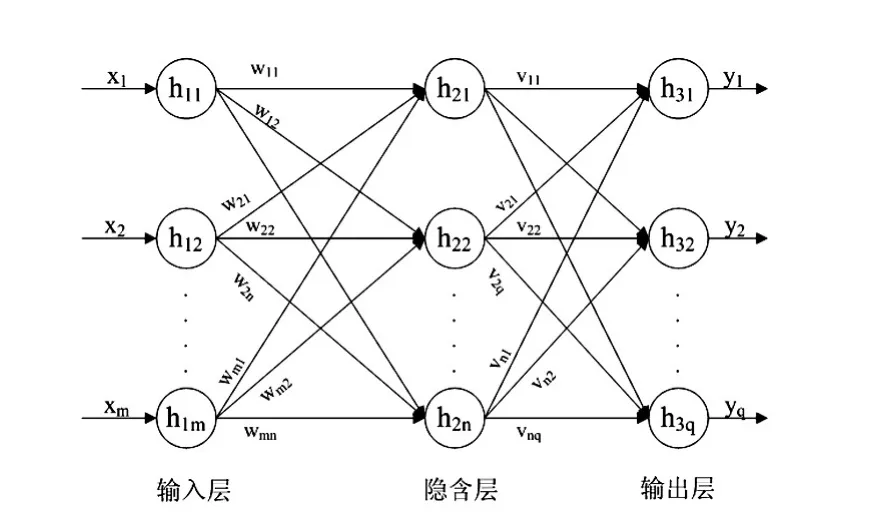
圖5 BP網(wǎng)絡(luò)結(jié)構(gòu)圖Fig.5 BP network structure
以座椅加速度作為該神經(jīng)網(wǎng)絡(luò)的輸入?yún)?shù),路面不平度作為輸出參數(shù)。輸入到輸出層采用的是S形函數(shù)傳遞,其表達(dá)式為
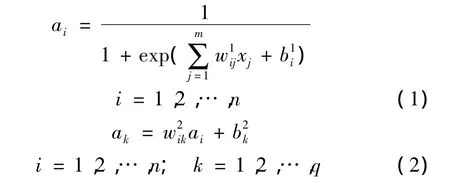
其中:ai為輸入層經(jīng)過隱含層傳遞函數(shù)后的輸出,ak為隱含層經(jīng)過輸出層傳遞函數(shù)后的輸出,w和b分別為權(quán)值和閥值。
理論已經(jīng)證明,具有一個(gè) S形隱含層加上一個(gè)線性輸出層網(wǎng)絡(luò),可以逼近任何有理函數(shù)[13],故選取兩層神經(jīng)網(wǎng)絡(luò)進(jìn)行逼近。對(duì)于隱層神經(jīng)元數(shù)目,經(jīng)多次試驗(yàn)確定,選取為20個(gè)。
2.2 系統(tǒng)訓(xùn)練樣本集的獲取
自卸車運(yùn)行路面為礦山路面,路面不平度主要集中在C、D、E三級(jí)范圍內(nèi),將路面不平度系數(shù)Gq(n0)在500×10-6m3~5000×10-6m3范圍內(nèi)均勻取200個(gè)值,結(jié)合文獻(xiàn)[14]利用逆變換的方法得到路面不平度xm隨路面走向的曲線,作為網(wǎng)絡(luò)理想輸出樣本。根據(jù)ADAMS中路面生成原理,編寫VB路面譜程序生成rdf文件,通過圖2剛?cè)狁詈夏P瓦M(jìn)行模擬仿真,得到相應(yīng)的座椅加速度曲線,作為網(wǎng)絡(luò)理想輸入樣本。在此共獲得200組樣本值,將其進(jìn)行歸一化處理,隨機(jī)取其中190組進(jìn)行訓(xùn)練,剩余10組用來測(cè)試。
2.3 BP網(wǎng)絡(luò)訓(xùn)練方法
將網(wǎng)絡(luò)實(shí)際輸出z與期望輸出y的均方差作為網(wǎng)絡(luò)訓(xùn)練誤差評(píng)價(jià)函數(shù),如式(3)所示

式中:m和q分別為樣本數(shù)及輸出參數(shù)數(shù)目,zij和yij分別為第j個(gè)樣本的第i個(gè)參數(shù)的實(shí)際輸出和期望輸出。應(yīng)用附加動(dòng)量及自適應(yīng)學(xué)習(xí)率的學(xué)習(xí)算法來訓(xùn)練網(wǎng)絡(luò)[15]。權(quán)值矩陣的迭代變化為

式中:a,η,t分別為動(dòng)態(tài)因子、學(xué)習(xí)速率及迭代步數(shù),wt+1和wt分別為第t+1及t個(gè)迭代對(duì)應(yīng)的權(quán)值矩陣。
根據(jù)每迭代步誤差L(w,b)是否降低,η進(jìn)行相應(yīng)改變,如果L(w,b)降低,則在下一步迭代步中η乘以1.01 的系數(shù),否則,η 乘以0.99。
3 遺傳算法優(yōu)化
為了獲得較好的初始權(quán)值和閾值,利用擅長(zhǎng)全局搜索的遺傳算法對(duì)BP神經(jīng)網(wǎng)絡(luò)的權(quán)值和閾值進(jìn)行優(yōu)化,可以有效辟免算法陷入局部極小值,提高收斂速度與精度[16]。圖6為遺傳算法優(yōu)化BP網(wǎng)絡(luò)流程圖。
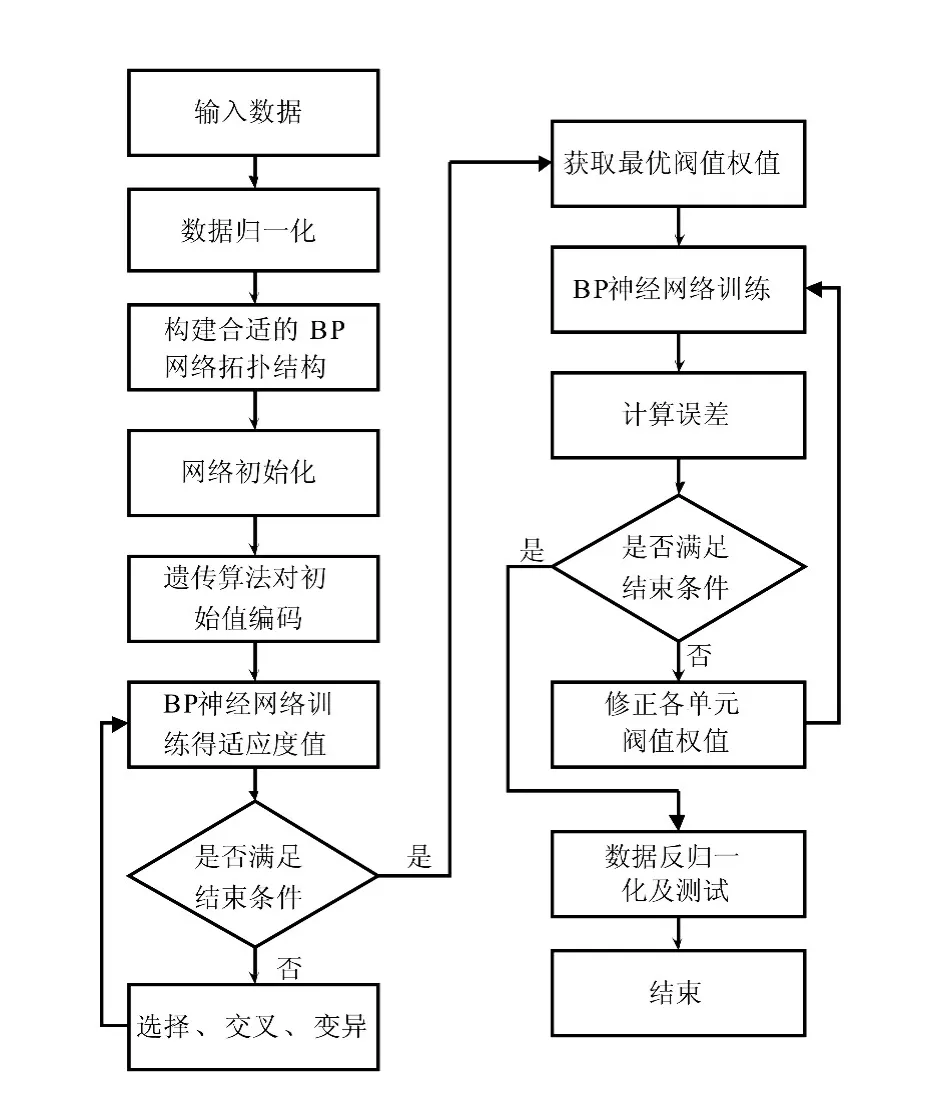
圖6 遺傳算法優(yōu)化BP網(wǎng)絡(luò)流程圖Fig.6 Genetic algorithm optimized BP network flowchart
采用精度高的實(shí)數(shù)值編碼方法,適應(yīng)度函數(shù)為誤差評(píng)價(jià)函數(shù)的倒數(shù),對(duì)個(gè)體進(jìn)行選擇、交叉、變異等遺傳操作處理,并遵循適者生存的原則,在潛在的解決方案種群中逐次產(chǎn)生一個(gè)近似最優(yōu)的方案[17],以此進(jìn)行種群的進(jìn)化,最終獲得最優(yōu)權(quán)值和閾值。
選擇:個(gè)體i選擇概率pi為

式中:Fi為個(gè)體i的適應(yīng)度值,N為種群個(gè)體數(shù)。
交叉:采用實(shí)數(shù)交叉法對(duì)第i個(gè)染色體gi和第j個(gè)染色體gj在n位進(jìn)行交叉操作,則交叉之后變?yōu)?/p>
式中:h為[0,1]之間隨機(jī)數(shù)。
變異:第m個(gè)個(gè)體的第n個(gè)基因amn變異操作方法如下
式中:v為一個(gè)隨機(jī)數(shù),u為當(dāng)前迭代次數(shù),Gmax是最大進(jìn)化次數(shù),gmin為基因 gmn的下限,gmax為基因 gmn的上限,r為[0,1]間的隨機(jī)數(shù)。
4 GA-BP在路面辨識(shí)中的應(yīng)用
4.1 辨識(shí)方法
將駕駛員座椅垂向加速度au作為輸入樣本,對(duì)應(yīng)的路面不平度xm作為輸出樣本。采用第3節(jié)所述的遺傳優(yōu)化算法,取種群大小為30,進(jìn)化代數(shù)為60次,交叉概率為0.4,變異概率為0.2。個(gè)體適應(yīng)度進(jìn)化過程如圖7所示,當(dāng)遺傳算法進(jìn)化到大約45代時(shí),個(gè)體適應(yīng)值趨于穩(wěn)定,得到最優(yōu)權(quán)值閥值。
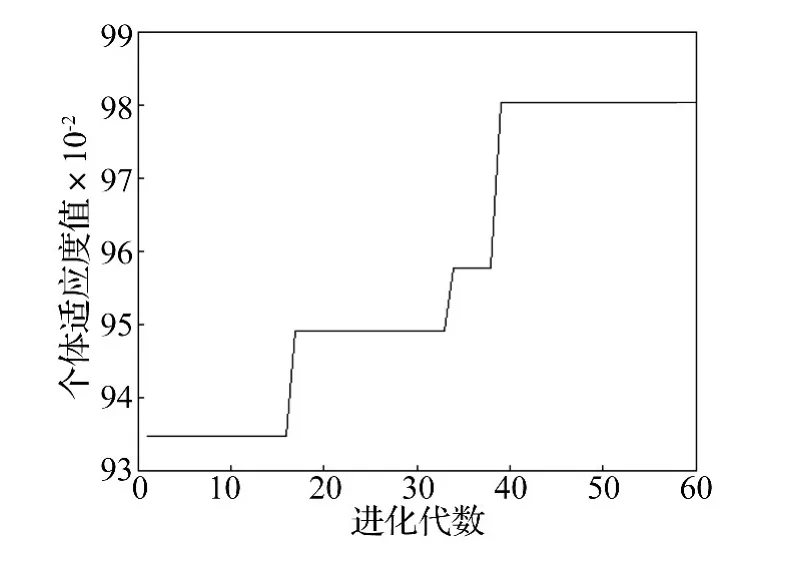
圖7 個(gè)體適應(yīng)度進(jìn)化過程Fig.7 The evolution of individual fitness
對(duì)190組樣本進(jìn)行訓(xùn)練,建立駕駛員座椅加速度與路面不平度的非線性映射關(guān)系。對(duì)辨識(shí)路面xb從功率譜密度和路面不平度兩方面進(jìn)行對(duì)比分析,網(wǎng)絡(luò)訓(xùn)練分析流程如圖8所示。
4.2 辨識(shí)結(jié)果
圖9~10給出了利用標(biāo)準(zhǔn)BP網(wǎng)絡(luò)和遺傳算法優(yōu)化BP網(wǎng)絡(luò)對(duì)D級(jí)路面辨識(shí)結(jié)果。其中R表示測(cè)試路面與辨識(shí)路面相關(guān)性系數(shù),e表示相對(duì)誤差值。圖11為利用BP網(wǎng)絡(luò)和GA~BP對(duì)10組測(cè)試樣本進(jìn)行路面不平度預(yù)測(cè)得出的相關(guān)系數(shù)及相對(duì)誤差。從圖9~11可看出,利用GA優(yōu)化BP網(wǎng)絡(luò)辨識(shí)路面與測(cè)試路面吻合度好,相關(guān)系數(shù)大約在97%左右,相對(duì)誤差大約在2%左右,與標(biāo)準(zhǔn)BP網(wǎng)絡(luò)辨識(shí)相比,預(yù)測(cè)精度提高,更加接近期望值。
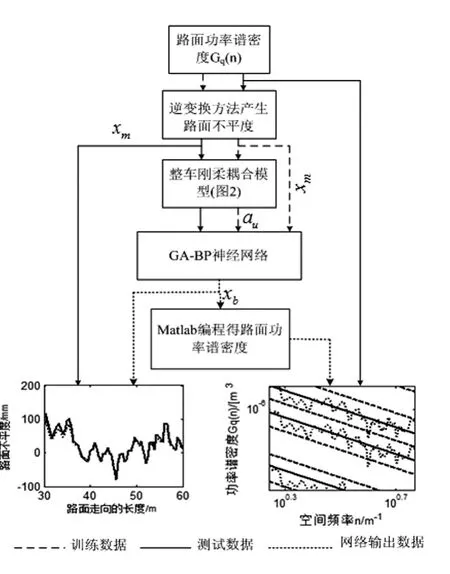
圖8 網(wǎng)絡(luò)訓(xùn)練流程圖Fig.8 Network training flowchart
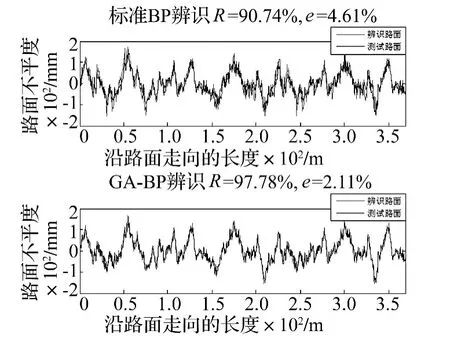
圖9 D級(jí)路面不平度辨識(shí)結(jié)果Fig.9 Class D road roughness identification results
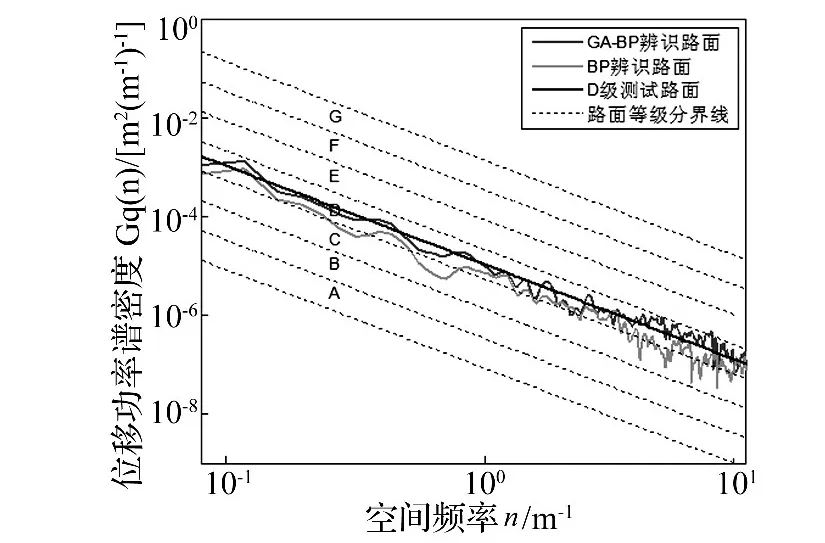
圖10 D級(jí)路面功率譜密度辨識(shí)結(jié)果Fig.10 Class D power spectral density of the identification result
4.3 試驗(yàn)驗(yàn)證
為了驗(yàn)證GA-BP神經(jīng)網(wǎng)絡(luò)辨識(shí)路面的準(zhǔn)確性,在礦區(qū)實(shí)際路面上對(duì)自卸車進(jìn)行了不同試驗(yàn)車速下(10 km/h,20 km/h,30 km/h)整車滿載道路行駛試驗(yàn),如圖12所示。
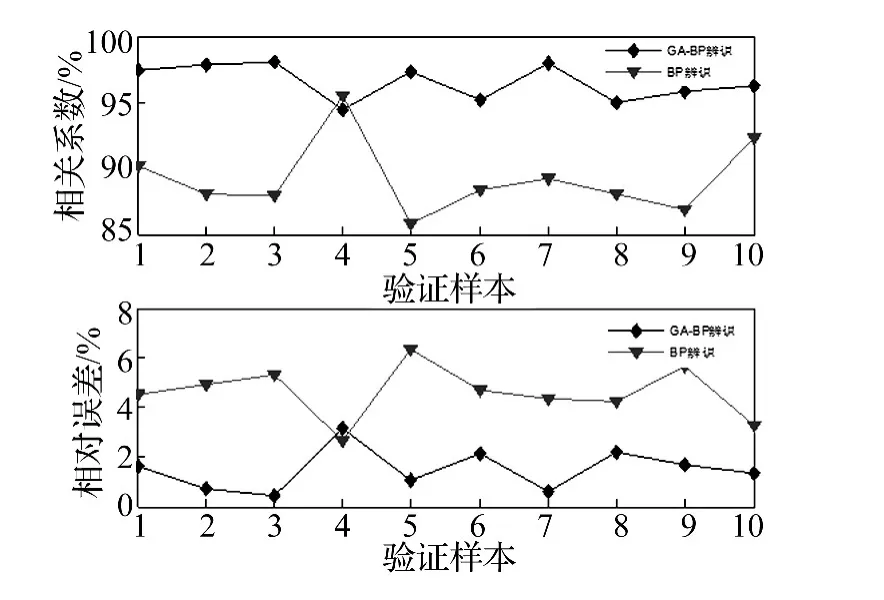
圖11 路面不平度預(yù)測(cè)相關(guān)系數(shù)及相對(duì)誤差Fig.11 Road roughness prediction correlation coefficient and the relative error
圖13為試驗(yàn)得到的30 km/h車速下駕駛室座椅垂向加速度,將其作為輸入樣本代入已訓(xùn)練好的GA-BP神經(jīng)網(wǎng)絡(luò)進(jìn)行計(jì)算,得辨識(shí)礦山路面的不平度如圖14所示,將該辨識(shí)路面導(dǎo)入圖2所示自卸車剛?cè)狁詈夏P停玫阶未瓜蚣铀俣确抡嬷担鐖D15所示。
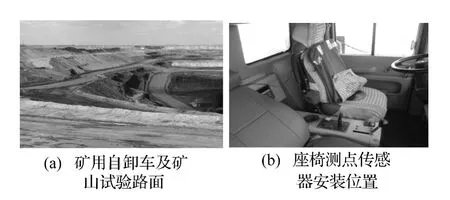
圖12 礦用自卸車滿載道路試驗(yàn)Fig.12 Fully loaded dump truck road test
可以清楚地看出,試驗(yàn)與仿真得出的座椅垂直方向加速度波動(dòng)范圍一致,均為 -2.0 m/s2~2.0 m/s2。將上述兩組座椅垂直方向加速度數(shù)據(jù)導(dǎo)入adams后處理中進(jìn)行FFT變換得到加速度功率譜密度曲線,如圖16所示。仿真結(jié)果與試驗(yàn)結(jié)果基本吻合,頻率成分都集中在低頻,峰值為 0.187 m2/(Hz·s4)與 0.196 m2/(Hz·s4),驗(yàn)證了辨識(shí)結(jié)果的準(zhǔn)確性。
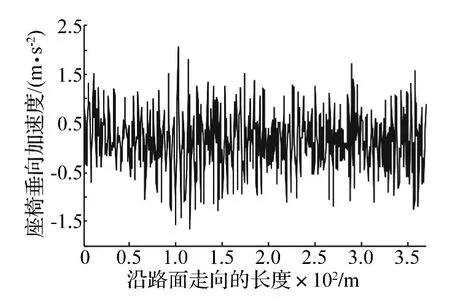
圖13 試驗(yàn)座椅垂向加速度響應(yīng)Fig.13 Vertical acceleration response of test seat
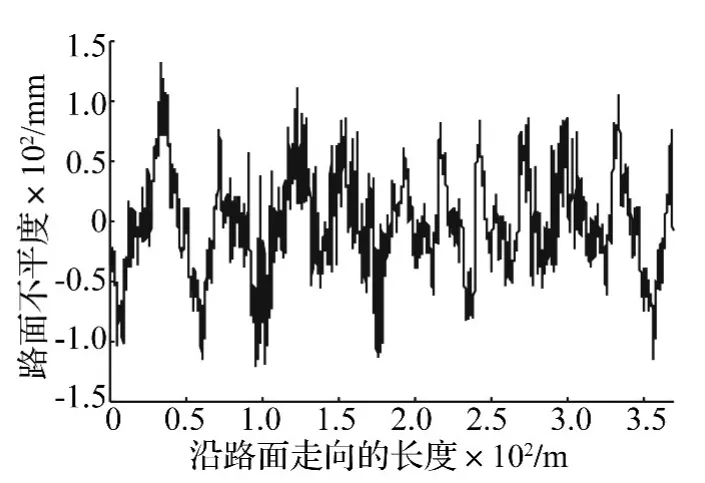
圖14 礦山路面不平度辨識(shí)結(jié)果Fig.14 Mine road roughness identification results
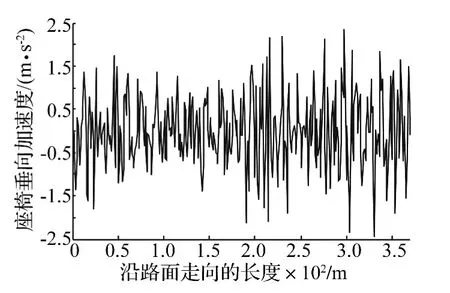
圖15 座椅垂向加速度仿真結(jié)果Fig.15 Seat vertical acceleration simulation results
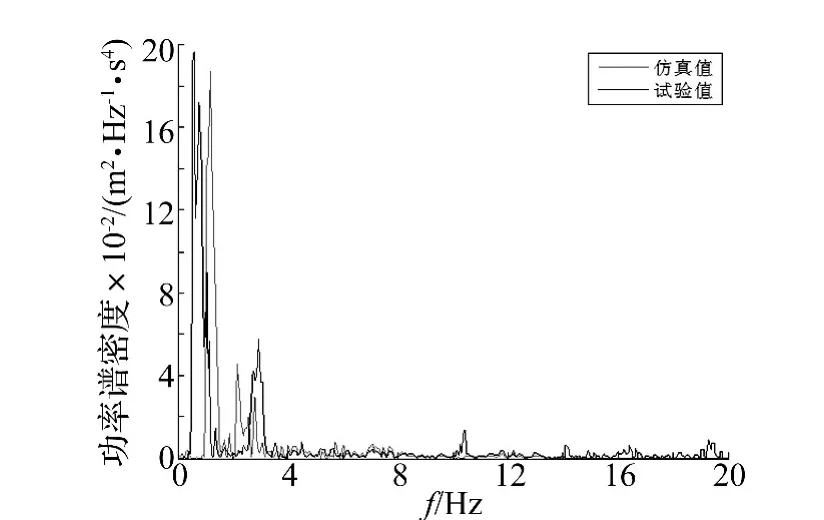
圖16 仿真與試驗(yàn)加速度功率譜密度曲線Fig.16 Simulation and test acceleration power spectral density curve
表2是駕駛室座椅不同車速下三個(gè)方向加速度均方根仿真值與實(shí)驗(yàn)值對(duì)比(X為行駛方向、Y為自卸車橫向、Z為垂向)。其中仿真路面分別為辨識(shí)路面與礦用車仿真常用C級(jí)、D級(jí)路面。可以看出,座椅垂向加速度的辨識(shí)路面仿真結(jié)果更加接近實(shí)驗(yàn)值,與C級(jí)、D級(jí)路面仿真結(jié)果比較,精度提高約12.3%,且對(duì)于X、Y方向,辨識(shí)路面仿真結(jié)果與實(shí)驗(yàn)值比較接近,進(jìn)一步驗(yàn)證了辨識(shí)路面的可靠性,因此辨識(shí)路面能更加真實(shí)反應(yīng)實(shí)際礦山路面,提高了模型的建模精度。但由表2可以看出,座椅振動(dòng)加速度垂直方向均方根值偏大,根據(jù)文獻(xiàn)[18]判斷出人體主觀感覺為相當(dāng)不舒適,故需對(duì)自卸車減振系統(tǒng)進(jìn)行優(yōu)化。
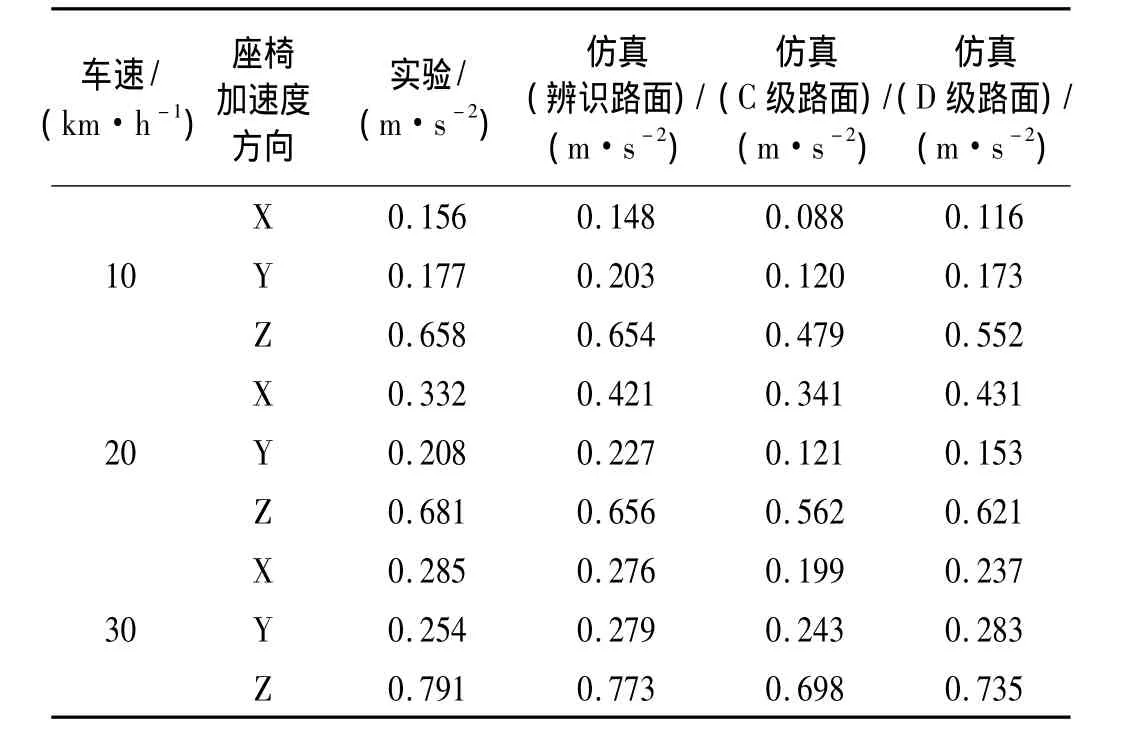
表2 座椅加速度均方根值仿真與實(shí)驗(yàn)對(duì)比Tab.2 Seat acceleration rms value comparison of simulation and experimental
5 平順性不確定性優(yōu)化
礦用自卸車載貨噸位較大,且其裝載方式具有很大隨機(jī)性,導(dǎo)致自卸車簧載質(zhì)量易發(fā)生較大變化,輪胎的氣壓和車輛行駛速度會(huì)直接導(dǎo)致輪胎剛度和阻尼的變化,簧載質(zhì)量和輪胎剛度阻尼可視為不確定性變量,其耦合在一起對(duì)系統(tǒng)響應(yīng)產(chǎn)生顯著影響。本文進(jìn)行平順性優(yōu)化時(shí)考慮了上述不確定因素,借助多島遺傳算法對(duì)油氣懸架和座椅參數(shù)進(jìn)行優(yōu)化。
5.1 優(yōu)化變量和不確定性量
對(duì)油氣懸架非線性剛度和阻尼特性影響較大的為其阻尼孔直徑和充氣高度[19],故選取前后懸架的充氣高度hf、hr,阻尼孔直徑df、dr以及座椅剛度k與阻尼c組成六維優(yōu)化變量X。將自卸車運(yùn)行過程中變化較大的輪胎剛度kt、阻尼ct及簧載質(zhì)量M選取為三維不確定變量U。優(yōu)化變量與不確定變量的取值范圍如表3、表4所示。

表3 各優(yōu)化變量取值范圍Tab.3 Each range of optimization variables

表4 不確定變量取值范圍Tab.4 Range of uncertain variables
5.2 目標(biāo)函數(shù)和約束條件
根據(jù)ISO2631-1:1997(E)標(biāo)準(zhǔn),將座椅三個(gè)軸向的總加權(quán)加速度a最小作為平順性評(píng)價(jià)目標(biāo)函數(shù),由于存在不確定量U,故不確定目標(biāo)函數(shù)表達(dá)式為:

其中:av為三個(gè)軸向的總加權(quán)加速度均方根值,avx,avy,avz分別為縱向、側(cè)向、垂向加權(quán)加速度均方根值。
針對(duì)任一組優(yōu)化變量X,因?yàn)榇嬖诓淮_定量U,且αv為 U的連續(xù)函數(shù),故 αv可能取值范圍為區(qū)間[amix(X)amax(X)],其中 amin(X),amax(X)分別為 αv在不確定變量U上的最小與最大取值。進(jìn)行不確定性優(yōu)化的關(guān)鍵是將不確定性目標(biāo)函數(shù)轉(zhuǎn)換為確定性目標(biāo)函數(shù)。故本文將式(9)不確定性目標(biāo)函數(shù)轉(zhuǎn)化為確定性目標(biāo)函數(shù),即:

自卸車在行駛過程中的側(cè)傾和俯仰運(yùn)動(dòng)對(duì)行駛穩(wěn)定性影響較大,為保證汽車的正常行駛,要求車身側(cè)傾角不超過6°~7°,車身的俯仰角小于1°~3°,且懸架動(dòng)撓度fd和車輪相對(duì)動(dòng)載荷Fd在適當(dāng)?shù)姆秶鷥?nèi)變化。

式中:σfd與σFd分別為懸架動(dòng)撓度與車輪相對(duì)動(dòng)載荷均方根值,[fd]為懸架動(dòng)撓度的許用值,取15。
5.3 不確定性優(yōu)化
根據(jù)優(yōu)化拉丁方法確定60組優(yōu)化變量和不確定變量樣本,通過基于辨識(shí)路面的ADAMS剛?cè)狁詈夏P头抡娣治觯玫娇偧訖?quán)加速度均方根值αv,根據(jù)以上60組樣本點(diǎn)和響應(yīng)值建立優(yōu)化變量和不確定變量與座椅加速度響應(yīng)的Kriging近似模型。任取兩組采樣樣本進(jìn)行仿真分析,近似模型的相對(duì)誤差見表5,該模型誤差小于2.5%,可以用于后續(xù)的不確定優(yōu)化。
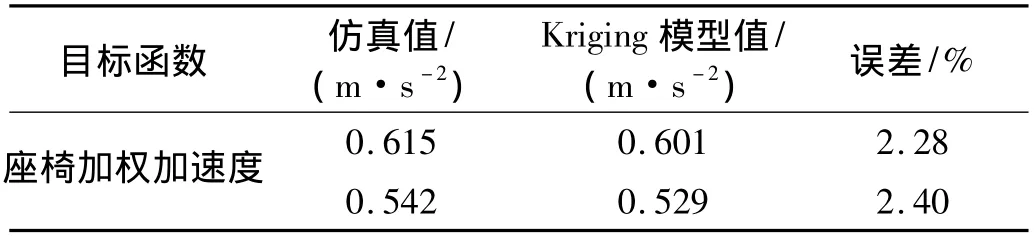
表5 近似模型驗(yàn)證Tab.5 Approximate model validation
基于以上建立的近似模型,借助多島遺傳算法,以式(10)為目標(biāo)函數(shù),式(11)為約束條件,對(duì)座椅參數(shù)和油氣懸架進(jìn)行優(yōu)化設(shè)計(jì)。優(yōu)化時(shí)遺傳算法操作參數(shù)如下:種群40,代數(shù)200,島數(shù)為10,交叉概率 0.8,變異概率0.03,經(jīng)優(yōu)化得到座椅與油氣懸架參數(shù)如表6所示。

表6 優(yōu)化后懸架和座椅參數(shù)Tab.6 The optimized parameters of suspension and seats
5.4 優(yōu)化結(jié)果分析
圖17是自卸車模型以30 km/h在辨識(shí)路面仿真得到座椅加速度時(shí)域與頻域響應(yīng)優(yōu)化前后結(jié)果對(duì)比。
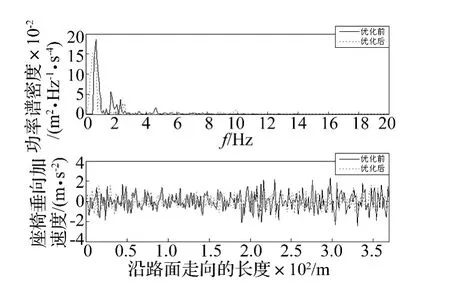
圖17 優(yōu)化前后平順性結(jié)果對(duì)比Fig.17 Results contrast of before and after optimization
從圖17中可清楚地看出,優(yōu)化后的座椅時(shí)域加速度響應(yīng)顯著降低,經(jīng)計(jì)算均方根由0.773 m/s2降為0.484 m/s2,下降了37.4%,功率譜密度的峰值減小了0.033 m2/(Hz·s4),從而提高了礦用自卸車的平順性,改善了礦用自卸車的乘坐舒適性。
6 結(jié)論
(1)本文結(jié)合礦用自卸車整車剛?cè)狁詈夏P停肎A-BP神經(jīng)網(wǎng)絡(luò)由便于測(cè)量的座椅加速度對(duì)礦山路面不平度進(jìn)行了有效辨識(shí),該方法操作簡(jiǎn)單、易于實(shí)現(xiàn)。與標(biāo)準(zhǔn)BP網(wǎng)絡(luò)相比,遺傳算法的優(yōu)化提高了網(wǎng)絡(luò)的預(yù)測(cè)能力。
(2)通過整車滿載道路行駛試驗(yàn),確定辨識(shí)的礦山路面不平度的可信性。辨識(shí)路面和C級(jí)、D級(jí)路面的仿真結(jié)果對(duì)比表明,辨識(shí)路面能更加真實(shí)模擬實(shí)際礦山路面,對(duì)提高建模精度具有重要的實(shí)際意義。
(3)以辨識(shí)礦山路面作為路面激勵(lì),通過多島遺傳算法對(duì)油氣懸架和座椅結(jié)構(gòu)參數(shù)進(jìn)行不確定性優(yōu)化研究,優(yōu)化后座椅垂直加速度均方根值下降了37.4%,平順性得到很大改善。
[1]段虎明,石峰,謝飛,等.路面不平度研究綜述[J].振動(dòng)與沖擊,2009,28(9):95-101.DUAN Hu-ming,SHI Feng,XIE Fei,et al.A survey of road roughness study[J].Journal of Vibration and Shock,2009,28(9):95-101.
[2]Castelnovi M,Arkin R,Collins T R.Reactive speed controlsystem based on terrain roughness detection[C]//Robotics and Automation,2005.ICRA 2005.Proceedings of the 2005 IEEE International Conference on.IEEE,2005:891-896.
[3]王亞,陳思忠,鄭凱鋒.時(shí)空相關(guān)路面不平度時(shí)域模型仿真研究[J].振動(dòng)與沖擊,2013,32(5):70-74.WANG Ya,CHEN Si-zhong,ZHENG Kai-feng.Simulation research on time domain model of road roughness with timespace correlation[J].Journal of Vibration and Shock,2013,32(5):70-74.
[4]高建,殷承良,張勇,等.基于路面自動(dòng)識(shí)別的ABS自適應(yīng)神經(jīng)模糊控制器仿真研究[J].汽車技術(shù),2006,6:4-7.GAO Jian,YIN Cheng-liang,ZHANG Yong,et al.The simulation research of ABS self-adapting nerve fuzzy control unit base on road automatic identification[J].Automobile Technology,2006,6:4-7.
[5]Wang Q,McDaniel J G,Sun N X,et al.Road profile estimation of city roads using DTPS[C]//SPIE Smart Structures and Materials+ Nondestructive Evaluation and Health Monitoring.International Society for Optics and Photonics,2013:86923C -86923C -8.
[6]韓建保,張魯濱,李邦國(guó).輪胎路面附著系數(shù)實(shí)時(shí)感應(yīng)識(shí)別系統(tǒng)[J].車輛與動(dòng)力技術(shù),2005,2:62-64.HAN Jian-bao,ZHANG Lu-bin,LI Bang-guo.Electronic sensing system for realTime identification of the tire-road adhesion[J].Vehicle & Power Technology,2005,2:62-64.
[7]Ngwangwa H M,Heyns P S,Labuschagne F J J,et al.Reconstruction of road defects and road roughness classification using vehicle responses with artificial neural networks simulation[J].Journal of Terramechanics,2010,47(2):97-111.
[8]Swart P L,Lacquet B M,Blom C.An acoustic sensor system for determination of macroscopic surface roughness[J].Instrumentation and Measurement,IEEE Transactions on,1996,45(5):879-884.
[9]楊明亮,徐格寧.基于約束剛?cè)狁詈舷到y(tǒng)的叉車振動(dòng)研究[J].機(jī)械工程學(xué)報(bào),2011,47(20):89-94.YANG Ming-liang,XU Ge-ning.Vibration study of fork-lift truck based on the constraint-rigid-flexible coupling System[J].Journal of Mechanical Engineering,2011,47(20):89-94.
[10]宋桂霞.汽車鋼板彈簧柔性體建模與仿真研究[J].農(nóng)業(yè)裝備與車輛工程,2011,6:008.SONG Gui-xia.Flexible body modeling and simulation study on automobile leaf spring[J].Agricultural Equipment &Vehicle Engineering,2011,6:008.
[11]陳建政,林建輝.在線連續(xù)測(cè)量輪軌接觸點(diǎn)的神經(jīng)網(wǎng)絡(luò)方法[J].振動(dòng)與沖擊,2007,26(5):90-92.CHEN Jian-zheng, LIN Jian-hui. Online continuous measurement of rail wheel contact point based on neuro network method[J].Journal of Vibration and Shock,2007,26(5):90-92.
[12]韓利芬,高暉,李光耀,等.神經(jīng)網(wǎng)絡(luò)與遺傳算法在拉延筋參數(shù)反求中的應(yīng)用[J].機(jī)械工程學(xué)報(bào),2005,41(5):171-176.HAN Li-fen,GAO Hui,LI Guang-yao,et al.Application of neural network and genetic algorithm to inverse solution of parameters of drawbead[J]. Journal of Mechanical Engineering,2005,41(5):171-176.
[13]錢立軍,襲著永,趙韓.基于BP神經(jīng)網(wǎng)絡(luò)的發(fā)動(dòng)機(jī)排放預(yù)測(cè)[J].汽車工程,2005,27(1):28-30.QIAN Li-jun,XI Zhu-yong,ZHAO Han.Engine emissions prediction based on back propagation neural network[J].Automotive Engineering,2005,27(1):28-30.
[14]劉獻(xiàn)棟,鄧志黨,高峰.基于逆變換的路面不平度仿真研究[J].中國(guó)公路學(xué)報(bào),2005,18(1):122-126.LIU Xian-dong, DENG Zhi-dang,GAO Feng. Study of simulation of road roughness based on inverse transform[J].China Journal of Highway and Transport,2005,18(1):122-126.
[15]Xu D,Yap F F,Han X,et al.Identification of spring-force factors of suspension systems using progressive neural network on a validated computer model[J].Inverse Problems in Engineering,2003,11(1):55-74.
[16]吳仕勇.基于數(shù)值計(jì)算方法的BP神經(jīng)網(wǎng)絡(luò)及遺傳算法的優(yōu)化研究[D].昆明:云南師范大學(xué),2006.
[17]琚亞平,張楚華.基于人工神經(jīng)網(wǎng)絡(luò)與遺傳算法的風(fēng)力機(jī)翼型優(yōu)化設(shè)計(jì)方法[J].中國(guó)電機(jī)工程學(xué)報(bào),2009(20):106-111.JU Ya-ping,ZHANG Chu-hua.Optimal design method for wind turbine airfoil based on artificial neural network model and genetic algorithm[J].Proceedings of the CSEE,2009(20):106-111.
[18]余志生.汽車?yán)碚摚跰].北京:機(jī)械工業(yè)出版社,2009.
[19]向華榮.基于油氣懸架的車輛平順性研究[D].南京:江蘇大學(xué)汽車交通工程學(xué)院,2005.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03