人手食指抓取過程仿真與分析*
2015-05-15 11:10:34馬永達袁銳波劉泓濱丘世因
新技術新工藝 2015年1期
馬永達,袁銳波,劉泓濱,丘世因
(昆明理工大學 機電工程學院,云南 昆明650500)
人手己成為機器人學者進行機器人設計,實現其靈活控制的思考源泉。為了使機器人的末端操作器對不同形狀和不同性質的物體具有抓、握、夾、拿等功能,越來越多的學者對仿人形靈巧手投入了極大的關注,其主要依據為:人手經過自然界進化己經成為優化結構,是靈巧手設計的重要參照;生活中的各種工具均是按照人手使用習慣設計的,仿人形靈巧手更適合操作這些工具;仿人形靈巧手與人手具有操作一致性的特點,可以利用人的操作經驗實現控制。另外,在某些特殊領域,如醫療、仿人機器人和娛樂等,仿人形靈巧手具有親切感,更容易被用戶接受。仿人靈巧手的主要功能是抓持和操作物體,抓持是操作的基礎,這就需要對人手的抓持過程進行研究。
就靈巧手的抓持規劃而言,實現主從操作的關鍵問題之一是如何將人手的抓持轉換為靈巧手的抓持,這就需要分析人手的運動學結構,建立人手運動學模型,從而使人手與仿人靈巧手之間的運動映射可以在關節空間和直角空間進行,運動映射空間的選擇應取決于抓持類型。對于指端抓持,物體與手指僅在指端接觸,主要用于操作物體或對物體位姿進行微小精確調整,因此確定指端相對于物體的位置是一個重要因素,而關節位置可看成指端位置的函數,由指端位置決定。所以,對于指端抓持而言,測量指端位置并進行直角空間映射是合理的選擇。
本文從人手解剖學結構和人手運動學模型著手,通過識別人手食指指端在抓持過程中的位置軌跡,找出食指在抓取物體過程中各個關節的運動規律,利用仿人靈巧手與人手相似的特點,借鑒人手的抓持經驗,建立從人手到仿人靈巧手的映射關系,以求運用到仿人靈巧手的運動與控制,并在機器人或其他領域得到運用[1-7]。
1 食指關節的運動
1.1 食指結構及其關節運動范圍
由人手解剖學可知,食指、中指、環指和小指結構基本相同,食指由3個指節和3個關節組成,3個指節分別為近指節、中指節和遠指節;3個關節分別為掌指關節、中指節關節和遠指節關節。一般認為除拇指外,其他4個手指的結構相同,各具有4個自由度,分別是掌指關節的屈曲和側擺自由度,中指節關節和遠指節關節的屈曲自由度。
根據手外科解剖學,下述分析食指各關節的屈伸范圍。掌指關節的主要運動是外展、內收、屈、伸和環轉,還可做有限度的被動旋轉活動,所要研究的食指掌指關節屈伸為0°~90°;近側指間關節屈曲0°~100°;遠側指間關節屈曲0°~90°。
1.2 食指運動學分析及建模
把單個手指的掌指關節以上部分作為研究對象,并對手指的指骨和關節用連桿和鉸鏈進行簡化,建立手指抓取運動模型。取指尖在抓持過程中到達的軌跡位置為與掌指關節的運動中心平齊的位置,設掌指、近側指及遠側指指骨到關節中心點的長度分別為l1、l2和l3,根據指尖的運動軌跡,研究掌指關節、近側指關節和遠側指關節的轉角θ1、θ2和θ3的變化規律。
按照食指機構運動學建立的坐標系如圖1所示。
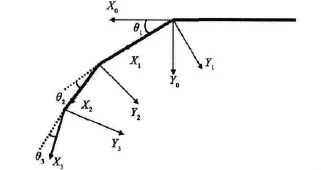
圖1 食指運動學坐標系
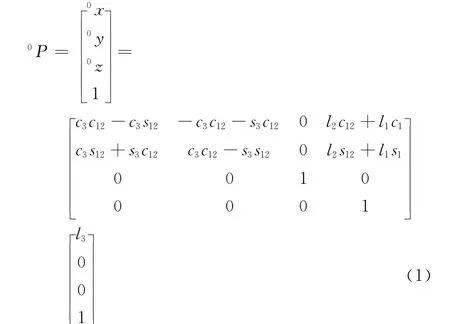
根據圖1所示坐標系可以得到手指運動時的指尖軌跡方程如下:
2 試驗分析與逆運動學計算
2.1 試驗測量手指抓取動作的數據
在食指靠近指尖位置做1個標志點,模擬用手指抓取某一物體,用數碼相機的攝像功能對手指的整個抓取動作過程進行攝像。在光線比較好的場地對手指動作進行攝像,為防止圖像抖動,把攝像機安裝在三角架上,并通過水準尺進行調平,按24幅/s進行拍攝。通過攝像機自帶軟件取出拍攝的圖像并轉存到影像格式avi文件,隨后用視頻軟件對其進行動作位置等時間分隔剪輯,保存為靜態圖像格式jpg文件,并通過AutoCAD軟件對等時間間隔的每幅圖像上的標志點進行處理和合成。手指抓取動作影像經剪輯處理后的圖片合成各等時間位置圖如圖2所示。根據所測的手指機構的各連桿長度繪出的食指運動過程的機構位置簡圖如圖3所示。

圖2 手指抓取動作影像圖

圖3 食指運動機構位置簡圖
2.2 根據實測軌跡進行食指逆運動學計算
根據試驗測量出的一系列軌跡點列出逆運動學方程見式2,用MATLAB軟件的優化函數Fmincon進行計算,分別計算出θ1、θ2和θ3值并擬合出θ1的曲線,如圖4所示,其表達式見式3;θ2曲線如圖5所示,其表達式見式4;θ3曲線如圖6所示,其表達式見式5。
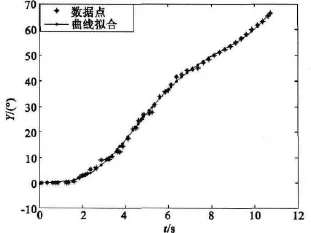
圖4 θ1曲線擬合圖
式2~式5如下。

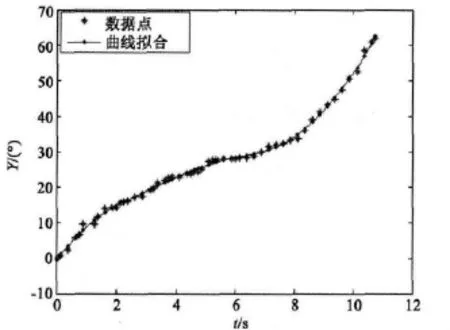
圖5 θ2曲線擬合圖

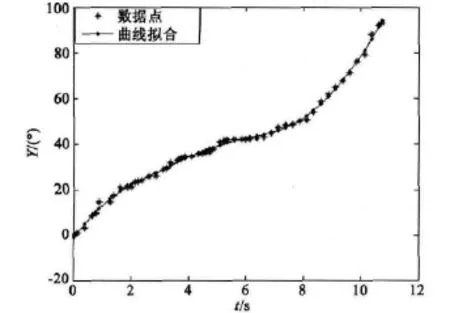
圖6 θ3曲線擬合圖

3 軌跡仿真與分析
利用SolidWorks軟件建立食指的三維模型,關節處采用轉動副連接,利用配合關系分別限定掌指關節、近側指關節和遠側指關節的角度運動范圍,固定掌骨部分。利用Solidworks軟件的Motion插件對建立的食指連桿機構虛擬樣機進行運動仿真,使仿真坐標系與試驗測量軌跡坐標系位置相同,分別在掌指關節、近側指關節和遠側指關節添加旋轉馬達,選擇旋轉馬達的運動類型表達式,依次在掌指關節、近側指關節和遠側指關節處輸入θ1、θ2、θ3的擬合函數,如圖7所示。選擇“結果與圖解”功能中類別選項里的“位移/速度/加速度”選項,選定指尖點(見圖8)來跟蹤食指連桿機構指尖的路徑,從而獲得仿真軌跡,如圖9所示。
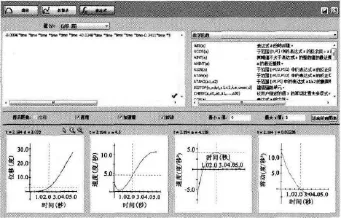
圖7 SolidWorks Motion旋轉馬達表達式編輯

圖8 SolidWorks Motion結果與圖解編輯
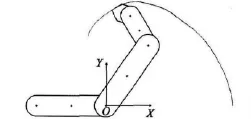
圖9 SolidWorks指尖仿真軌跡
利用MATLAB軟件將仿真軌跡與試驗測量軌跡進行分析,如圖10所示,可見仿真軌跡基本符合試驗軌跡的規律,平均誤差為0.125mm。
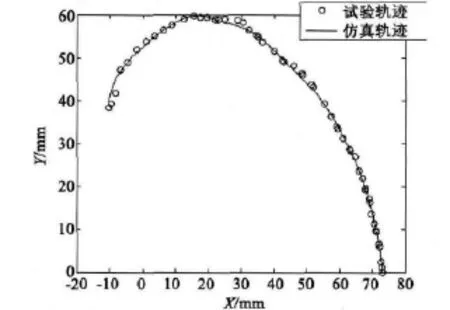
圖10 仿真軌跡與試驗軌跡比較
4 結語
通過試驗與仿真結果可知,手指的運動是由手指各關節的轉動帶動指骨的運動來完成的,手指抓取物體時,各關節的運動可以由一定的運動規律來描述。研究表明式3~式5表示的運動規律可用來描述手指關節的運動,因此可以用一定的運動規律來控制仿人靈巧手的抓持運動過程。借鑒人手的抓持經驗,建立從人手到仿人靈巧手的映射關系,對仿人靈巧手的進一步研究以及手功能康復的應用等其他領域具有積極的指導意義。
[1]Jau D.Telemanipulation with four fingered hand system[J].IEEE Int Conf on Rohotics and Automation,1996,3:338-343.
[2]DS SolidWorks公司.SolidWorks Motion運動仿真教程[M].北京:機械工業出版社,2012.
[3]高秀來,于恩華.人體解剖學[M].北京:北京大學醫學出版社,2003.
[4]蔡自興.機器人學[M].北京:清華大學出版社,2000.
[5]劉博.人手食指運動學建模[J].機器人,2003,29(3):214-218.
[6]李繼婷.人手抓持識別與靈巧手的抓持規劃[J].機器人,2002,24(6):530-534.
[7]張水德,劉廷榮.機器人多指靈巧手的結構參數優化分析[J].機器人,1999,21(3):234 -240.