結合菲涅爾理論的免攜帶設備定位研究*
2015-05-06 07:47:31劉凱,夏然,柴柯
傳感技術學報 2015年2期
劉 凱,夏 然,柴 柯
(上海大學特種光纖與光接入網重點實驗室通信與信息工程學院,上海 200072)
?
結合菲涅爾理論的免攜帶設備定位研究*
劉 凱*,夏 然,柴 柯
(上海大學特種光纖與光接入網重點實驗室通信與信息工程學院,上海 200072)
針對免攜帶設備定位DFL(Device Free Localization)精度低,近距離定位目標不易區分等問題,提出了一種結合菲涅爾理論的定位估計方法。該方法首先通過無線層析成像RTI(Radio Tomographic Imaging)原理,粗定位出人體目標位置,其次計算環境參量,劃分限制區域,考慮肩寬、頭寬等具體人體參數,對限制域中滿足菲涅爾理論的位置點進行擬合加權,實現精確定位;在出現近距離目標時,對比人體參數的實驗值與理論值,判斷是否為多目標。實測數據下的定位仿真結果表明,與傳統的RTI方法相比,該方法在定位的準確度上提高了30%,同時實現了近距離目標數目的判決。
免攜帶設備定位;無線層析成像;菲涅爾理論;正則正交匹配追蹤算法
免攜帶設備定位DFL(Device Free Localization)是在不需要目標攜帶任何設備的情況下,獲取到目標的位置信息,因而在緊急救援、安防、智能家居、醫院病人檢測等場合應用前景廣泛。近年來,基于無線射頻信號的定位方案,由于具有成本低、通用性能優良的特點[1-2],成為DFL的優選方案。當目標進入無線傳感器網絡中,目標的遮擋會使得無線射頻信號產生陰影衰落[3],進而影響網絡中各個無線節點的接收信號強度RSS(Received Signal Strength)[4],利用目標出現前后無線節點的RSS量的差異就能實現定位。圖1是DFL原理示意圖。

圖1 Device-free Localization系統示意圖
DFL是2007年Youssef[4]和張滇[5]分別提出來的,以無線網絡作為通信網絡,由鏈路的衰落量求解目標位置。Youssef[6-7]將DFL問題建模為指紋識別問題,通過比較當前實時的鏈路RSS量與存儲在離線射頻地圖中的數據信息,得到目標的估計位置。之后,張滇[8]根據目標對鏈路RSS量的影響特性,提出用鏈路法進行定位。Patwari[9]類比工業CT的原理,將RTI[10]用于DFL中,為之后的相關研究提供了理論基礎。由于RTI只能定位靜止的人,Wilson[11]提出根據RSS方差量和目標空間位置的關系進行定位,隨后他還提出了增強該算法健壯性的方法[12]并且結合卡爾曼濾波實時定位。
為了獲得有效的RSS量,Wilson[13]建立了包含有RSS衰落量和增強量的Skew-Laplace信號強度模型,依據該模型,Patwari[14]提出多尺度空間模型,修改了權重因子參數。Wang[15]根據相鄰兩個時刻的RSS差值和鏈路異常檢測方案實現DFL,之后他又提出用飛行時間求解RTI[16]。Zhao[17]提出了用直方圖之間核距離來代替RSS變化量的KRTI。
由于目標的個數相對較少,可以將目標看作是稀疏信號,Kanso[18]等最先將壓縮感知[19]應用到RTI中,并通過求L1范數最小化進行信號重構,估計目標位置。Wang[20]提出貝葉斯貪婪匹配追蹤算法,解決RTI中的病態求逆問題。Wang[21]通過利用壓縮感知的稀疏場景部署來提高目標的定位精度。由于基于壓縮感知的稀疏重構運算量與所選的鏈路有關,Yang[22]根據鏈路的變化與目標的空間位置的相關性,用壓縮最大匹配選擇算法快速重構信號。這些工作成功應用了壓縮感知實現免攜帶設備定位,但重構算法復雜,定位效率低,對于多目標定位,尤其是當出現近距離目標時,區分效果不是很理想。
總體來說,這些方法都是基于傳統的RTI,每一種定位方法都是將人體看作是圓柱體模型,沒有給定位目標賦予人體特征的意義。人體作為定位對象,和桌子、椅子等物體具有較大區別,其體態特征的差異,對定位的準確性有極大影響。據此,本文將人體肩寬、頭寬等具體參數考慮到DFL中,提出了一種基于菲涅爾理論的免攜帶定位方法。首先通過RTI得到人體目標的估計位置,其次根據菲涅爾理論,計算環境參量,在限制區域中對符合該理論條件的點進行加權處理,實現精確定位;對出現近距離目標的情況,通過比對人體參數值,判斷是否為多目標。仿真結果表明本文提出的方法能夠有效的提高免攜帶設備定位的精度,能夠成功實現近距離目標數目的判斷。
1 RTI及菲涅爾理論
1.1 RTI
在保證無線通信網絡全覆蓋的條件下,無線節點相互接收射頻信號。在待探測區域沒有目標進入時,采集N個節點構成的N(N-1)條無線鏈路,作為背景信息,同時將待探測區域分割成很多塊區域,其中每塊區域稱為像素,當目標進入待探測區域時,進行無線信號強度實時采集,獲得每條鏈路的RSS量。RTI[10]提出接收信號強度與人體位置關系滿足線性方程
ΔRSS=WΔx+n
(1)
其中ΔRSS是接收信號強度的差值,W是每個像素點衰落值的權重矩陣,Δx是每個像素點上的RSS量衰落值,n是噪聲。在RTI中,將人體看作是統一的圓柱體模型,不考慮人體的身高,肩寬等具體參數。
1.2 菲涅爾原理
根據惠更斯一菲涅爾原理,在電波的傳輸過程中,波陣面上的每一點都是一個進行二次輻射的球面波的波源(S),這種波源稱為二次波源。而空間任一點的輻射場都是由包圍波面的任意封閉曲面上各點的二次波源(E、H)發出的波在該點相互干涉、疊加的結果。顯然,封閉曲面上各點的二次波源到達接收點的遠近不同,這就使得接收點的信號場強的大小發生變化,圖2是惠更斯一菲涅爾原理示意圖。

圖2 惠更斯一菲涅爾原理
對這種變化,引入空間菲涅爾區概念。根據Stefano Savazzi理論[23],在人體周圍的菲涅爾區中,菲涅爾半徑,人體參數值和RSS變化量存在以下關系:
(2)
(3)
(4)
ΔRSS表示RSS變化量,bx表示肩寬,by表示頭部到背部的距離。rl(xt)表示在xt位置的時候所表示的菲涅爾半徑,Δh0表示環境參量,γ1為π2/2,ql(xt)表示發射機到xt位置的距離,dl表示發射機和接收機之間的距離,λ表示載波的波長,fac表示人體參數。圖3是人體在菲涅爾空間區域中,在隨機位置下的菲涅爾半徑示意圖。

圖3 人體在菲涅爾空間區域中,在隨機位置下的菲涅爾半徑
2 結合菲涅爾理論的DFL
2.1 粗定位
RTI的基本原理就是在已知RSS變化量ΔRSS的情況下,通過式(1)的方程反演求解,得到每個像素點上的衰落量Δx,然后通過層析成像實現定位。
由于多個可能的位置能夠引起的RSS變化量的結果是相同的,因而通過RSS量求解目標位置是病態的欠定問題,為了提高定位的精確性,采用正則正交匹配追蹤算法(ROMP)進行RTI方程求解,對目標進行初始定位。
2.2 曲線擬合法匹配環境參量
根據式(2)可以看出,環境參量和RSS變化量的關系是二次函數的關系,其中常數項Δh0即為此時的環境參數。在未進行定位之前由隨機目標進入網絡中,站在選定的位置上,通過測量到的數據由曲線擬合法求解出Δh0,圖4為通過曲線擬合法求解環境參量Δh0的示意圖。
通過ROMP算法對目標進行粗定位后,以粗定位位置為中心,1 m為半徑的圓作為限制域,在該限制域中尋找更精確的位置。根據式(4)中可知,一般情況下,人體參數fac的取值范圍是0.05到0.06之間,并且通過實驗數據得到驗證。圖5是單個目標A和目標B在隨機位置上計算得到的人體參數fac示意圖。
在fac取值范圍已知的情況下,通過對限制域中的點進行篩選,將坐標代入式(2)中,如果反算出的fac值落在閾值范圍中,保留該位置。最后,對限制域中滿足條件的位置的點進行擬合加權,得到更加精確的定位坐標。
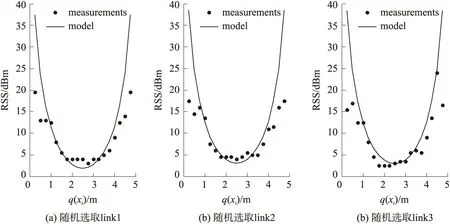
圖4 曲線擬合法求解環境參量Δh0

圖5 單個目標在隨機位置計算出來的人體參數值
2.3 近距離目標判決
在之前的相關研究中,目標的分布一般相對較遠,在1 m范圍以外是可以有效區分的。但是當目標距離較近時,判斷目標個數成為一個急需解決的問題。傳統的RTI,當出現近距離目標的情況時,成像結果往往相同,單純的成像圖無法體現定位的位置上有幾個目標。圖6是分別有一個目標和兩個目標時的RTI成像結果的示意圖。

圖6 單個目標和多個目標時的RTI成像結果
針對這一問題,提出結合菲涅爾理論的求解方法。根據式(2)可以看出,單個人體的人體參數fac和RSS變化量是二次函數的關系,并且人體參數fac存在一定的取值范圍。通過定位出的位置可知道菲涅爾半徑,并且對位置點附近鏈路的RSS衰落量從大到小進行排序,保留衰落量較大的三條鏈路。利用式(1),根據篩選出來三條鏈路的RSS變化量反算出人體參數fac并加權平均。如果計算結果在fac的取值范圍之內,判決為單目標;反之,判決為多個目標。
3 定位流程
綜上所述,針對結合菲涅爾理論的DFL,本文算法的總體流程如圖7所示。

圖7 定位流程圖

圖8 CC2530傳感器節點示意圖
4 實驗仿真結果分析
為了驗證提出方法的有效性,本文進行了實驗,收集、分析數據并進行MATLAB仿真。實驗采用IEEE802.15.4標準的Zigbee通信網絡,通信頻率為2.4 GHz,實時采集無線信號接收強度。實驗環境是在一個空曠的操場上,選擇一個5 m×5 m的區域。實驗器材,12個CC2530的傳感器節點,4臺電腦收集數據,圖8是CC2530傳感器節點示意圖。12個傳感器依次平行放置于兩端采集數據,每個傳感器節點相距1 m,方框表示人所站的位置編號,每個位置之間相距0.5 m。圖9是實驗具體場景布置的示意圖,圖10是實驗場景模擬圖。

圖9 實驗具體場景布置圖

圖10 實驗場景模擬圖

圖11 RTI定位誤差和利用菲涅爾區定位誤差的對比
根據以上理論所述,當單個目標和多個目標分別位于位置7時,計算出來的人體參數fac如表1所列。

表1 單個目標和多個目標分別位于位置7時的人體參數值fac
從表1可以看出,通過計算得到的人體參數fac的大小,即使在RTI成像結果相同的情況下,也能夠實現對該處人體目標個數的判斷。
5 結論
免攜帶設備定位的出現為緊急救援、醫院病護檢測提供了可能,其中相關算法的研究在不斷深入。本文提出的結合菲涅爾理論的免攜帶設備定位能夠將人體的實際參數情況考慮到定位中,更貼合真實場景,在實測數據中,定位精度有30%的提高,同時,有效解決了在出現近距離目標的情況時,傳統RTI無法判斷目標個數的難題,仿真結果表明本文提出方法的有效性,并具有一定的研究應用價值。
[1] 張震,閆連山,劉江濤.基于DV-hop的無線傳感器網絡定位算法研究[J].傳感技術學報,201l,24(10):1469-1472.
[2]劉凱,余君君.跳數加權DV-Hop定位算法[J].傳感技術學報,2012,25(11):1539-1542.
[3]Agrawal P,Patwari N.Effects of Correlated Shadowing:Connectivity,Localization and RF Tomography[C]//International Conference on information Processing in Sensor Networks,2008:82-93.
[4]Youssef M,Mah M,Agrawala A.Challenges:Device-Free Passive Localization for Wireless Environments[C]//Proceedings of the 13th Annual ACM International Conference on Mobile Computing and Networking,2007:222-229.
[5]Zhang D,Ma J,Chen Q,et al.An RF-Based System for Tracking Transceiver-Free Objects[C]//Fifth Annual IEEE International Conference on Pervasive Computing and Communications,2007:135-144.
[6]Kosba A E,Abdelkader A,Youssef M.Analysis of A Device-Free Passive Tracking System in Typical Wireless Environments[C]//International Conference on New Technologies,Mobility and Security,2009:1-5.
[7]Eleryan A,Elsabagh M,Youssef M.Automatic Generation of Radio Maps for Localization Systems[C]//IEEE Proceedings of the 17th Annual International Conference on Mobile Computing and Networking,2011:93-94.
[8]Zhang D,Liu Y H.Link-Centric Probabilistic Coverage Model for Transceiver-Free Object Detection in Wireless Networks[C]//IEEE 30th International Conference on Distributed Computing Systems,2010:116-125.
[9]Patwari N,Wilson J.RF Sensor Networks for Device-Free Localization:Measurements,Models,and Algorithms[J].Proceedings of the IEEE,2010,98(11):1961-1973.
[10]Wilson J,Patwari N.Radio Tomographic Imaging with Wireless Networks[J].IEEE Transactions on Mobile Computing,2010,9(5):621-632.
[11]Wilson J,Patwari N.See Through Walls:Motion Tracking Using Variance-Based Radio Tomography Networks[J].IEEE Transactions on Mobile Computing,2011,10(5):612-621.
[12]Zhao Y,Patwari N.Robust Estimators for Variance-Based Device-Free Localization and Tracking[OL].arXiv Preprint arXiv:110.1569,2013.
[13]Wilson J,Patwari N.A Fade-Level Skew-Laplace Signal Strength Model for Device-Free Localization with Wireless Networks[J].IEEE Transactions on Mobile Computing,2012,11(6):947-958.
[14]Kaltiokallio O,Bocca M,Patwari N.A Multi-Scale Spatial Model for RSS-Based Device-Free Localization[J].arXiv Preprint arXiv:1302.5914,2013.
[15]Wang J,Gao Q,Yu Y,et al.Robust Device-Free Wireless Localization Based on Differential RSS Measurements[J].IEEE Transactions on Industrial Electronics,2012,60(12):5943-5952.
[16]Wang J.Time-of-Flight-Based Radio Tomography for Device Free Localization[J].IEEE Transactions on Wireless Communications,2013:1-11.
[17]Zhao Y,Patwari N,Phillips J M,et al.Radio Tomographic Imaging and Tracking of Stationary and Moving People Via Kernel Distance[C]//Proceedings of the 12th International Conference on Information Processing in Sensor Network,ACM,2013:229-240.
[18]Kanso M A,Rabbat M G.Compressed RF Tomography for Wireless Sensor Networks:Centralized and Decentralized Approaches[C]//5th IEEE International Conference on Distributed Computing in Sensor Systems(DCOSS),Montreal,Canada,2009:173-186.
[19]Donoho D L.Compressed Sensing[J].IEEE Transactions on Information Theory,2006,52(4):1289-1306.
[20]Wang J,Zhang X,Gao Q,et al.Device Free Localization with Wireless Networks Based on Compressive Sensing[J].IEEE Transactions on Communications,2012,6(15):2395-2403.
[21]Wang J,Fang D,Chen X,et al.LCS:Compressive Sensing Based Device-Free Localization for Multiple Targets in Sensor Networks[C]//INFOCOM,2013 Proceedings IEEE,2013:145-149.
[22]Yang Z,Huang K,Guo X,et al.A Real-Time Device-Free Localization System Using Correlated RSS Measurements[J].EURASIP Journal on Wireless Communications and Networking,2013,2013(1):1-12.
[23]Savazzi S,Nicoli M,Carminati F,et al.A Bayesian Approach to Device-Free Localization:Modeling and Experimental Assessment[J].IEEE Journal of Selected Topics in Signal Processing,2014:16-29.
The Study of Device Free Localization with Wireless Networks Based on Fresnel Theory*
LIUKai*,XIARan,CHAIKe
(Key Laboratory of Specialty Fiber Optics and Optical Access Networks,Shanghai University School of Communication and Information Engineering,Shanghai 200072,China)
In allusion to problems such as low accuracy of Device Free Localization,uneasy differentiation of location targets within a short distance etc.,this paper proposes a localization estimation method based on the theory of Fresnel.This method roughly identifies the localization of human body at first through Radio Tomographic Imaging(RTI)principle.The second step is to calculate environmental parameters and divide the restricted area;meanwhile,in order to realize accurate positioning,weighted fitting is conducted to the positions within the restricted area which meet the demand of Fresnel by taking specific body parameters,such as the breadth of shoulders and head,into consideration.Thirdly,when targets within a short distance appear,the comparison between the experiment value and theoretical value of human parameters should be made,in order to identify whether there are multiple targets.According to simulation results,compared with traditional RTI method,this method improves the degree of accuracy by 30% in terms of positioning in our experiment;at the same time,the number of targets within a short distance can also be identified.
device free localization;radio tomographic imaging;fresnel theory;regularized orthogonal matching pursuit

劉 凱(1981-),男,漢族,上海大學通信與信息工程學院副教授,碩士生導師。主要研究方向為盲信號處理和通信信號處理,liukai@shu.edu.cn;

夏 然(1991-),女,漢族,安徽黃山人,上海大學信號與信息系統碩士研究生,主要研究方向為免攜帶設備定位。
項目來源:上海市自然科學基金項目(15ZR1415500)
2014-09-15 修改日期:2014-11-18
C:7230
10.3969/j.issn.1004-1699.2015.02.026
TP212
A
1004-1699(2015)02-0297-06
猜你喜歡
《學習方法報》歷史中考版(2023年21期)2023-11-09 07:40:38
當代陜西(2022年5期)2022-04-19 12:10:18
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:28
湘潮(上半月)(2021年4期)2021-07-20 08:05:28
汕頭大學學報(自然科學版)(2020年4期)2020-12-14 07:05:00
數學小靈通(1-2年級)(2020年9期)2020-10-27 03:24:18
當代貴州(2019年41期)2019-12-13 09:28:56
中國共青團(2015年7期)2015-12-17 01:24:38
學習月刊(2015年21期)2015-07-11 01:51:44
中學生數理化·八年級物理人教版(2014年2期)2014-04-02 08:50:44