基于LabVIEW探測車運動功能的設計
2015-05-05 08:49:43謝麗蓉常一峰胡婷婷
實驗技術與管理 2015年12期
路 朋, 謝麗蓉, 常一峰, 胡婷婷
(新疆大學 電氣工程學院, 新疆 烏魯木齊 830047)
基于LabVIEW探測車運動功能的設計
路 朋, 謝麗蓉, 常一峰, 胡婷婷
(新疆大學 電氣工程學院, 新疆 烏魯木齊 830047)
設計了一臺多功能探測車,介紹了探測車的各項功能設計過程。該設計以PC機和DaNI探測車的硬件平臺為基礎,以LabVIEW 2013為主軟件開發平臺,以LabVIEW Robotics、FPGA、Real-Time為輔助軟件,并配備了超聲波傳感器。通過LabVIEW Robotics 2013軟件編寫程序,可以控制探測車的運動,完成自動避開障礙物、手動運行、正多邊形運行和S形軌跡運行等多種功能。
探測車; LabVIEW; DaNI平臺; 運動控制; 避障功能
為了使探測車順利完成探測任務,通常要求探測車的移動具有靈活避障、越障、爬坡和較好被動適應地形的能力。先進的導航技術和控制技術固然可使探測車的避障能力得以加強,然而發展先進的移動系統、提高移動系統在執行任務中的行駛性能和工作穩定性也是探測車研制的重要內容[1]。在很多文獻中都有利用LabVIEW軟件進行實驗系統設計的記載[2-13],本文根據這些文獻的思路,以LabVIEW 2013為主軟件,以DaNI為測試平臺,以LabVIEW Robotics、FPGA、Real-Time為輔助軟件,完成了探測車自動避障、手動控制、S形行走軌跡等功能的設計。
1 硬件系統介紹
采用的硬件為PC機和美國NI公司開發的DaNI探測車測試平臺(見圖1)及其配套設備。NI LabVIEW探測車起步包,也被稱為DaNI(NI公司研制的小型運動機器人),是一類工業級、現成的探測車平臺,在設計上既適合傳授探測車和機電一體化概念,也適合探測車系統的原型開發。該套件提供了傳感器、電機以及用于嵌入式控制的NI Single-Board RIO設備,采用LabVIEW圖形化開發環境,可對套件內含的探測車進行編程。

圖1 DaNI 2.0探測車測試平臺
控制模塊以NI Single-Board 9632為核心模塊,以FPGA模塊、Real-Time模塊為輔助模塊。電機采用2個12 V直流電機,分別驅動探測車的左右輪。所需電流范圍為0~4.66 A和堵轉電流4.6 A。Single-Board RIO嵌入式控制器的輸出電流為3 mA;傳感器采用頻率為40 kHz的超聲波傳感器,可以探測障礙物的最小距離為2 cm、最大距離為3 m。超聲波傳感器可在伺服電機的帶動下轉向,在運動過程中可以探測到前方180°范圍內的障礙物。
2 運動功能系統總體設計
探測車多功能運動測試系統由DaNI測試平臺、Single-Board RIO、超聲波傳感器和系統軟件構成,總體設計結構框圖如圖2所示。
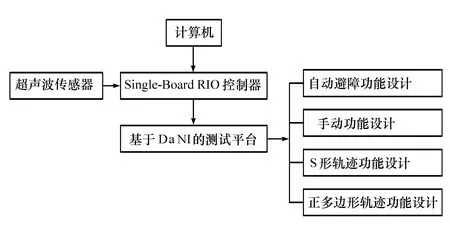
圖2 探測車運動功能總體設計框圖
NI sbRIO-9632嵌入式控制器是DaNI探測車的核心,具有400 MHz工業處理器,內部嵌有FPGA模塊,110條3.3 V(容限SV/兼容TTL)數字I/O線,32路單端/16路差分電路、16位分辨率、最高采樣速率達250 kS/s的模擬輸入通道,4路16位分辨率、最高更新率達100 kS/s的模擬輸出通道。另外還有3個連接器,適用于使用板卡級NIC系列I/O模塊的擴展I/O。
可重新配置的I/O功能允許為DaNI探測車pigtail擴展設計和開發所需的各種傳感器,如雷達、紅外線、陀螺儀等。sbRIO-9632在設計上能夠輕松嵌入高容量應用,實現靈活性、可靠性和高性能。
超聲波傳感器可測量到距離2 cm~3 m的障礙物,頻率為40 kHz。有一個伺服電機控制其掃描角度,可以掃描180°的周圍環境。
本系統采用NI sbRIO-9632嵌入式控制器作為整個測試系統的執行單元,通過超聲波傳感器實時采集現場模擬信號。信號經過控制器內部調理后,便可下達執行指令。控制器內置10/100 Mbit/s以太網端口,可實現網絡與主機內置式Web(HTTP)和文件(FTP)服務器上的編程通信。也可使用RS232串行端口來控制周邊設備。本文選用GPIB接口進行通信,數據傳輸速度可以達到1.5 Mbit/s,且傳輸距離遠、可靠性好。連接方式為總線并行式,儀器直接并聯在總線上,可與符合國際標準的各類程控儀器連接,構成自動化測試系統網。
3 系統軟件設計
3.1 軟件開發平臺
采用LabVIEW 2013作為探測車運動功能開發平臺。LabVIEW的圖形化編程容易,具有豐富的擴展函數庫和分析子程序,使之在開發虛擬儀器上具有獨特優勢。輔助軟件用NI推出的LabVIEW Robotics 2013,該軟件是圖形化系統設計(GSD)軟件的新成員,提供了標準的開發平臺,用于設計探測車和自主控制系統。此外,LabVIEW Robotics 2013還提供了豐富的探測車函數庫,可以連接標準探測車的傳感器和執行機構,集成了智能操作和感知的基礎算法,擁有探測車和自主式車輛的運動控制函數。以上軟件的配合編程,使用起來方便、快捷,大大提高了系統的開發效率。
3.2 軟件設計
為使測試系統具有良好的擴展性并便于升級,采用了模塊化、結構化的軟件設計方法,使功能程序和驅動程序相對獨立。軟件包括系統初始化、系統參數配置、傳感器數據采集和數據保存等模塊,系統設計流程如圖3所示。當用戶啟動運動系統后,系統進行初始化,然后輸入功能參數,數據輸入正確后將執行選定的功能。如果數據輸入錯誤,則系統重新初始化。
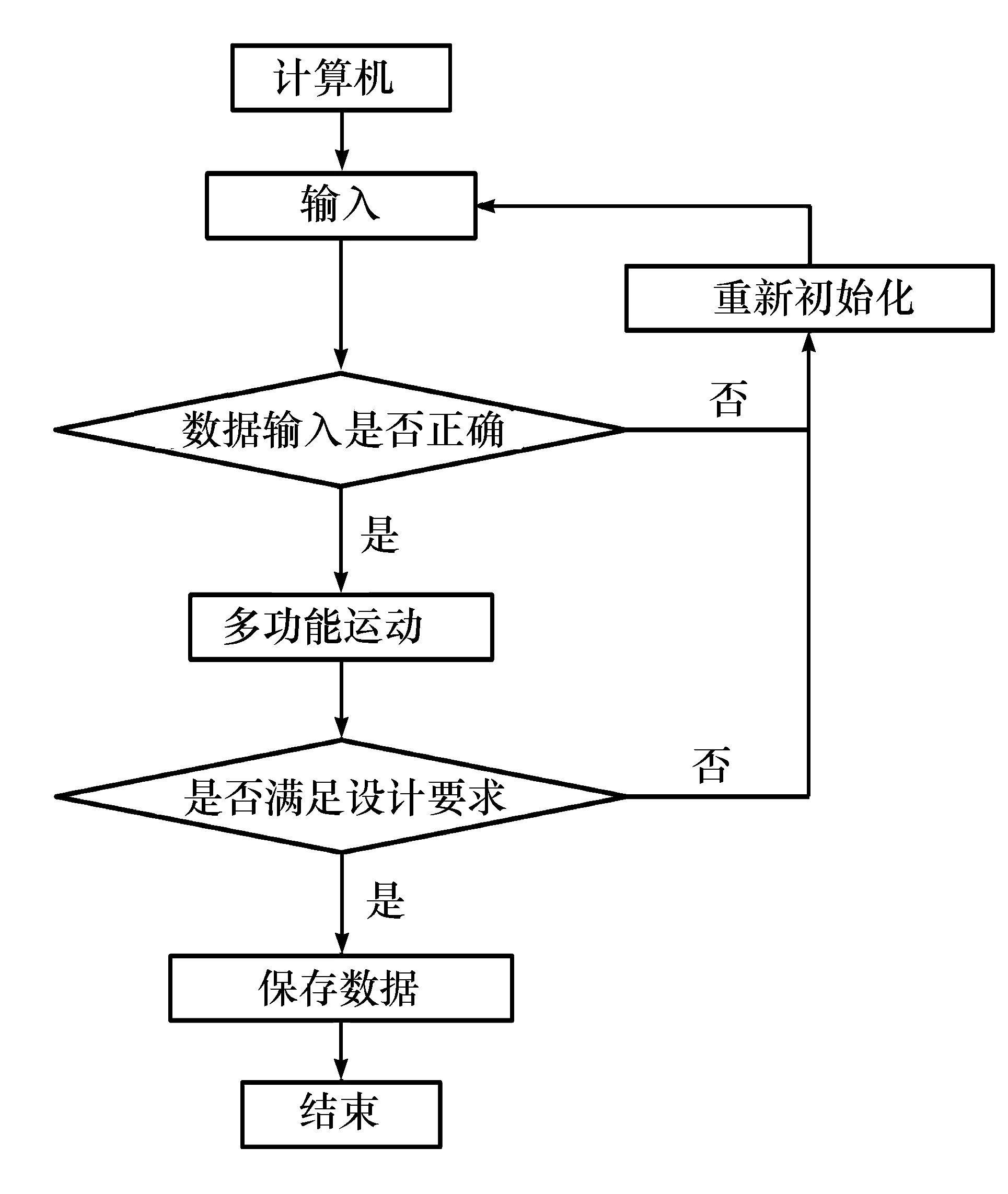
圖3 系統設計流程圖
3.2.1 多功能環節設計
本文一共設計了4個功能,分別是自動避障功能、手動控制功能、正多邊形運動以及S形軌跡運動功能。考慮到便于管理和操作方便等原因,結合了LabVIEW Robotics自帶的基礎程序,匯編出了一個總程序。在該總程序中,可以方便地選擇不同的功能,不僅直觀、方便,還可以使得界面更為美觀。
3.2.2 自動避障功能設計
在自動避障功能的設計中,首先給DaNI多功能探測車初始化,設定伺服電機帶動超聲波傳感器的轉向角度。用一個周期為20 ms的定時循環來編寫程序,保證電機在運行控制過程中的連續性和實時性。在程序中,采用了4個移位寄存器,分別將車與FPGA通信數據流、車運動數據流、掃描障礙數據流和錯誤數據流在每次循環的終點又送回下一次循環的起點,以保證每次循環正確、可靠地進行。自動避障程序圖如圖4所示。
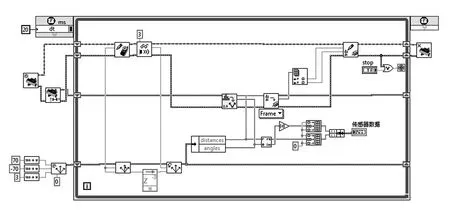
圖4 自動避障程序圖
3.2.3 手動功能設計
在手動控制功能程序的前面板中,垂直指針滑動桿和水平指針滑動桿分別代表探測車的前進速度和轉向角速度。此外,前面板中還有布爾量開始按鈕、暫停按鈕、停止按鈕、讀取距離按鈕。其中,布爾量開始按鈕用來控制探測車運行,停止按鈕是用來結束整個程序,讀取距離按鈕用來顯示探測車行走的距離。手動控制功能程序圖如圖5所示。
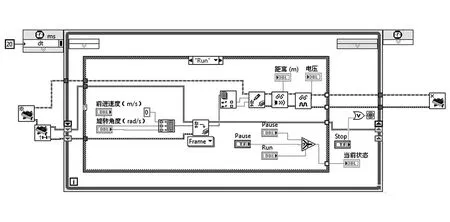
圖5 手動控制功能程序圖
3.2.4 S形軌跡功能設計
在探測車的S形軌跡設計中,前面板設計較簡單,選取2個數值量分別表示探測車行走軌跡的半徑和速度,有一個布爾量表示停止。在前面板改變速度即可改變探測車行走一個半圓弧的時間,改變半徑即可改變探測車行走的一個半圓弧。首先通過半徑求出第一個弧長,根據弧長和速度求出行走時間t,由t來延時第一幀平鋪順序結構,用時間t計算出轉彎時需要的角速度ω,先設計出1/2圓弧,計算公式如下:
(1)
將所求出的角度和運動時前進的速度,一同合并成數組并分別對應X坐標數值和Y坐標數值,延時時間的單位用毫秒(ms),所以要進行單位轉換,把s換成ms。S形軌跡程序圖如圖6所示。
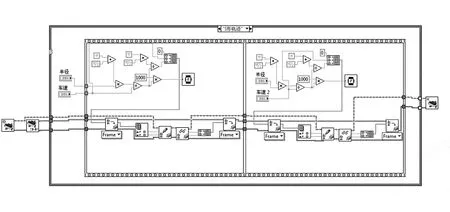
圖6 S形軌跡程序圖
3.2.5 正多邊形軌跡功能設計
采用2級平鋪順序結構設計正多邊形軌跡,利用正多邊形內角和、外角和計算出角度,輸入角度后需要轉化為弧度,之后給舵機賦值為“0”,這樣可以保證探測車的初始位置正好為0°。調用一個While循環,定時為20 ms,保證程序的連續性。當程序執行到While循環時,首先讀取角度,轉化為弧度后即可按特定多邊形運行。正多邊形程序圖如圖7所示。
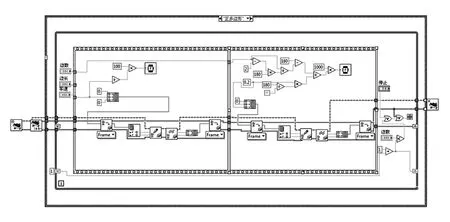
圖7 正多邊形程序圖
4 結束語
本文利用圖形化編程軟件LabVIEW進行了探測車運動功能的開發及其程序設計,分別完成了自動避障功能、手動功能、S形軌跡功能、正多邊形軌跡功能的設計。通過DaNI 2.0探測車平臺進行現場演示,表明設計是成功的。
References)
[1] 尚偉燕,李舜酩.六輪腿式探測車行走機構結構設計及動力學分析[J].機械制造,2010(10):15-18.
[2] 黃豪彩,楊燦軍,陳道華,等.基于LabVIEW的深海氣密采水器測控系統[J].儀器儀表學報,2011(1):40-45.
[3] 王芃,高震,董景新.一種物美價廉的基于LabVIEW的PID控制實驗裝置設計[J].實驗技術與管理,2014,31(1):107-109.
[4] 聶影,馮向軍,廖瑛,等.基于LabVIEW的狀態機模型研究[J].計算機測量與控制,2007(9):1166-1168,1171.
[5] 葛亞明,于鑫,李軍,等.基于LabVIEW和PCI-1711的過程控制實驗系統設計[J].實驗技術與管理,2015,32(1):108-111.
[6] 王建群,南金瑞,孫逢春,等.基于LabVIEW的數據采集系統的實現[J].計算機工程與應用,2003(21):122-125.
[7] 羅建,雷勇,黃昊,等.基于LabVIEW的遠程電機實驗臺的構建[J].實驗技術與管理,2014,31(3):122-125.
[8] 李偉,陳國明,張傳榮,等.基于LabVIEW的ACFM網絡實驗平臺開發與測試[J].實驗技術與管理,2013,30(3):65-67,73.
[9] 紀仁杰,劉永紅,吳寶貴,等.基于LabVIEW的電火花放電狀態檢測實驗平臺開發[J].實驗技術與管理,2015,32(2):73-76.
[10] 岳洪偉.基于LabVIEW的數字信號處理虛擬實驗平臺實現[J].實驗技術與管理,2011,28(8):70-72.
[11] 齊羽.基于LabVIEW的嵌入式系統實驗平臺設計與實現[J].實驗技術與管理,2011,28(11):50-51,56.
[12] 周雅,殷志鋒.LabVIEW環境下信號處理類課程信息化實驗仿真平臺[J].實驗技術與管理,2013,30(11):137-140.
[13] 師青梅,皮偉.基于虛擬儀器技術的太陽能電池實驗教學創新[J].實驗技術與管理,2013,30(2):94-96,100.
Design of rover sport function based on LabVIEW
Lu Peng, Xie Lirong, Chang Yifeng, Hu Tingting
(College of Electrical Engineering, Xinjiang University, Urumqi 830047, China)
This design adopted in PC hardware platform and DaNI robot, mainly 2013 LabVIEW software development platform, LabVIEW Robotics, FPGA, Real-Time for the auxiliary software, and cooperated with ultrasonic sensor to constitute a multifunctional machine sports car. Through LabVIEW Robotics 2013 software program, the movement of the robot can be controlled, to realize automatically avoiding obstacles, manual operation, regular polygon running and S-shaped path and other functions.
robot; LabVIEW; DaNI platform; motion control; obstacle avoidance
2015- 04- 21
國家自然科學基金項目(51264036);新疆大學“運動控制系統”精品課程建設項目(XJU201202)
路朋(1989—),男,河南周口,在讀碩士研究生,主要研究方向為控制系統優化設計
E-mail:xjdxlu@163.com
謝麗蓉(1969—),女,湖南衡陽,碩士,副教授,主要研究方向為控制系統優化設計.
E-mail:wzywwwxr@163.com
TP242.6
A
1002-4956(2015)12- 0143- 03
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
人大建設(2019年12期)2019-05-21 02:55:44
瞭望東方周刊(2017年42期)2017-12-05 18:49:38
中國科技論壇(2017年7期)2017-07-25 08:49:53
環球時報(2017-03-30)2017-03-30 06:44:45
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
中國衛生(2015年3期)2015-11-19 02:53:32
