現代飛機作動系統余度設計和維修性分析
2015-04-27 02:46:44劉藝濤
機床與液壓 2015年16期
劉藝濤
(廣州民航職業技術學院,廣東廣州510403)
早期民用飛機的飛行控制系統全部采用機械桿系來控制操縱面的偏轉,作動器為機械液壓作動器。1983年首架空客A320 飛機成功采用全電傳飛控系統后,民用飛機進入了電傳控制時代。目前除了空客公司的A320,A330/340,A380 和A350 飛機,波音公司的B777 和B787 飛機也采用電傳飛控系統。與B737 等飛機的機械操縱系統采用鋼索傳遞飛行員指令、機械液壓伺服作動器驅動操縱面不同,電傳飛控系統通過駕駛桿(側桿) 的位移傳感器將飛行員動作指令轉換為電信號并發送給飛控計算機,由控制律計算后將控制指令傳送到作動系統,最后由電液伺服作動器根據電流指令來驅動操縱面運動。
當前,隨著A380 和B787 等多電飛機的出現,今后民用飛機飛控系統的發展趨勢是將會采用功率電傳的新型作動器。但目前此類作動器一般作為備份使用,傳統的電液伺服作動系統依然處于主導地位。
1 飛機作動系統余度設計
一般來說,提高系統可靠性的方法有兩種: (1)通過提高系統的基本可靠性實現(如選用高質量等級元器件) ,這種方法付出的代價高昂,而可靠性提高并不顯著,工程中也往往達不到可靠性要求指標;(2) 采用余度技術提高系統任務可靠性。余度技術就是利用硬件或軟件冗余來提高系統運行可靠性的一種方法,這種方法雖然會降低系統的基本可靠性,但可以提高系統容錯能力,能夠達到提高系統的任務可靠性的目的。
目前,現代飛機電傳飛控系統均采用余度設計技術提高系統可靠性。飛控計算機一般為三余度或四余度容錯計算機,采用相似的或非相似的余度設計技術。作為飛控系統的執行機構,作動系統是飛控系統的重要組成部分,其系統性能及可靠性的好壞,直接影響到飛控系統乃至飛機的性能及可靠性。由于飛機上操縱面眾多,不同操縱面重要性不同,可靠性要求也不同,因此不同的操縱面,其作動系統會采用不同的余度設計。下面選取空客A320 和波音B777 兩型飛機,對照分析飛控作動系統的余度設計技術。
1.1 A320 作動系統
A320 飛控系統采用三余度/二余度(相似硬件,非相似軟件) 技術,飛控計算機采用雙通道配置,一個通道為命令通道,另一個通道為監控通道,兩個通道采用相同的CPU 芯片,軟件采用不同的算法實現。A320 包括7 個飛控計算機: 兩個升降舵副翼計算機(ELAC) 、3 個擾流片升降舵計算機(SEC) ,兩個飛行增穩計算機(FAC) ,其中ELAC 和SEC 為主飛控計算機。它們根據正常、備用或直接法則處理飛行員和自動駕駛儀的輸入。另外增加兩個飛控數據集中器(FCDC) ,用于主飛控計算機和其他飛控系統之間進行通信。A320 飛機飛控計算機結構如圖1所示。
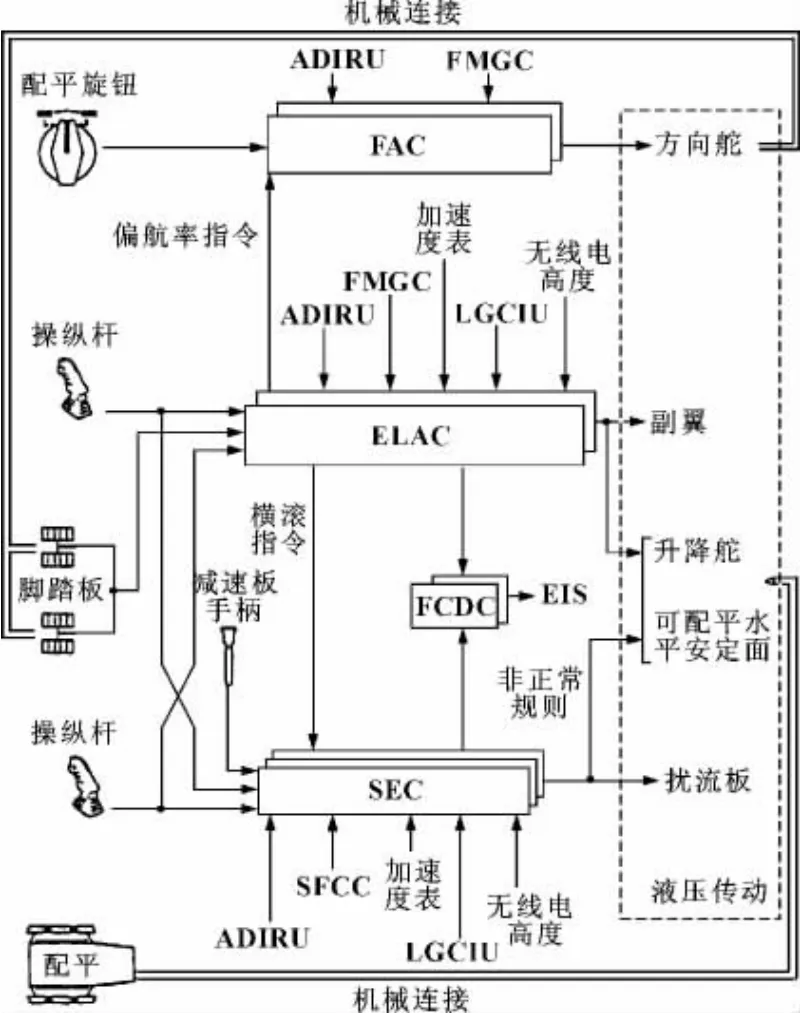
圖1 A320 飛機飛控計算機結構
飛控計算機的指令傳送到電液伺服作動系統,利用液壓力驅動操縱面偏轉。其中每個副翼有兩個作動器,每個作動器受不同計算機控制,由不同液壓驅動。正常狀態只有一個作動器工作,稱為主動狀態;另一個作動器隨動,稱為阻尼狀態。當主動狀態作動器的計算機或液壓失效時,會切換到阻尼狀態; 原來阻尼狀態的作動器則切換到主動狀態,接管對副翼操縱面的控制。升降舵作動系統與副翼的類似,但控制計算機余度增多,每個作動器由2 個計算機控制。方向舵由2 臺計算機控制,由3 個不同液壓源的作動器共同驅動,當某個液壓失效時,對應的作動器轉為阻尼隨動狀態。擾流板沒有采用余度設計,每個擾流板只有1 個計算機控制和1 個液壓力作動。除擾流板以外的所有操縱面的作動器,在某一時刻只有1 臺計算機有控制權,當前計算機失效時控制權會切換到備用計算機。A320 飛機飛控作動系統的計算機和液壓分布如圖2 所示。

圖2 A320 飛機作動系統布局
下面以副翼作動系統為例,分析系統故障時計算機和作動器的切換過程。副翼系統共有4 個作動器(如圖2 所示) ,正常情況下,左外和右內兩個作動器處于主動模式,左內和右外兩個作動器處于阻尼模式; 左外和右外兩個作動器由藍液壓驅動,左內和右內兩個作動器由綠液壓驅動。系統一切正常時,ELAC 1 控制左外和右內兩個作動器工作。如圖3 所示,ELAC 1 控制作動器內部電磁閥通電,閥門打開,液壓力進入到模式選擇閥,閥芯在液壓力作用下移到左邊。計算機控制信號傳至伺服閥,控制液壓力來驅動作動筒運動的方向和幅度,從而帶動副翼的偏轉,此時作動器處于主動模式。模式選擇閥位置和作動筒位置分別通過傳感器信號反饋傳回計算機,構成閉環控制系統。
當ELAC 1 計算機故障時,如圖4 所示,電磁閥斷電,閥門把液壓切斷,模式選擇閥在彈簧力作用下移到右邊,此時作動器處于阻尼模式(旁通狀態) ,副翼由相鄰作動器驅動。活塞桿反過來被操縱面帶動,使得作動筒兩個腔室里的油液受迫流過節流孔而產生阻尼力。如果作動器失去液壓力時,模式選擇閥也會移到右邊,作動器處于阻尼模式。不論何種情況,只要模式選擇閥處于阻尼模式位置(右邊) ,其位置傳感器將信號反饋回ELAC 1,則控制邏輯會讓ELAC 2 給原來處于阻尼模式的作動器電磁閥通電,將其轉換成主動模式,接管對副翼的控制。因此,只要有計算機或者液壓故障,副翼作動系統的兩個作動器會隨即切換模式,作動器切換時其電控計算機和液壓源隨即也切換,保證副翼能正常工作。

圖3 副翼作動器主動模式
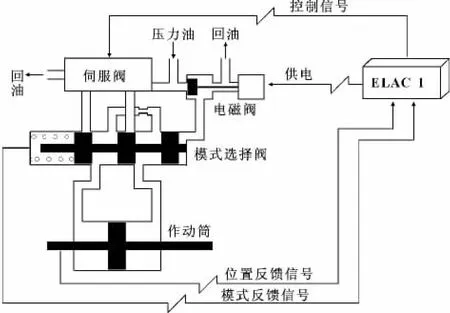
圖4 副翼作動器阻尼模式
1.2 B777 飛機作動系統
B777 飛機在三余度的飛控計算機(PFC) 當中采用了非相似余度技術,它的3 套液壓能源和伺服作動系統均是相似余度的。飛控制計算機包括3 個相同的主飛控計算機(左PFC、中PFC 和右PFC) ,每個主飛控計算機中有3 個非相似的計算機通道。飛控計算機根據控制律和飛行包線保護計算操縱面的控制指令,計算指令信號通過ARINC 629 總線再發送到4 個作動筒控制電子裝置ACE (L1,L2,C,R) ,ACE 將這些數字信號轉換為模擬信號,并將它們發送到動力控制組件 (PCU) ,再由CPU 控制操縱面的偏轉。B777 飛機飛控計算機結構如圖5 所示。

圖5 B777 飛機飛控計算機結構
B777 飛機飛控作動系統的每個操縱面由不同余度的PCU 來控制(如圖6 所示) 。
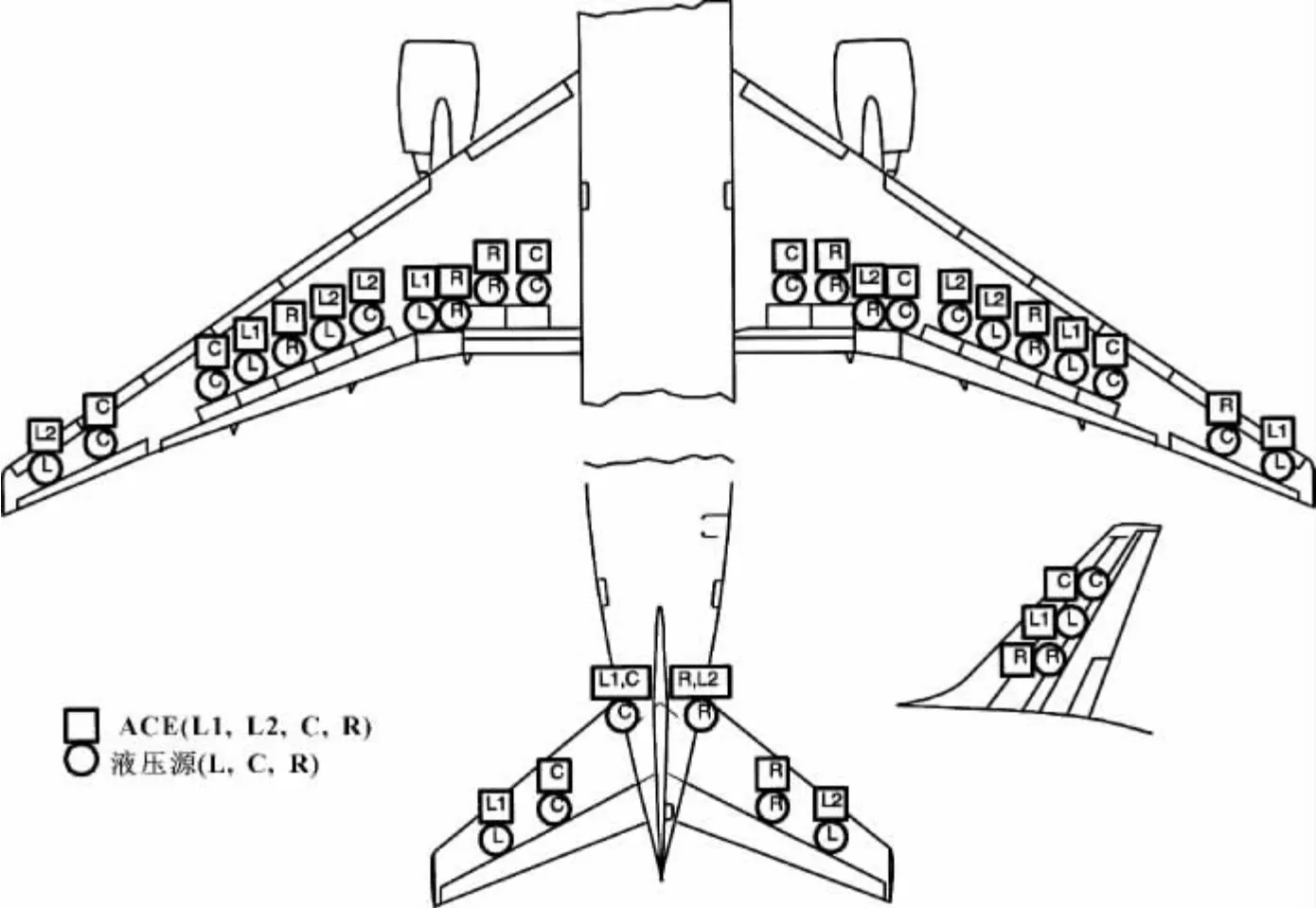
圖6 B777 飛機作動系統布局
例如: 每個擾流片由1 個PCU 控制,每個副翼、襟副翼和升降舵由2 個PCU 控制,方向舵由3 個PCU 控制。PCU 主要由液壓作動筒、電液伺服閥和位置反饋傳感器組成,并與ACE 構成閉環控制系統。在ACE 內部有失效監控電路,如果監測某個PCU 發生故障,ACE 會切斷供往受影響PCU 電磁閥的電源,將其轉換為隨動工作狀態,其他PCU 繼續工作,直到全部故障。B777 有左、中、右(L,C,R) 3 套液壓系統,同一操縱面的PCU 均由不同的液壓源提供壓力。當1 套液壓源故障時,其他PCU 可以繼續工作,不會導致該操縱面失效。
同樣以副翼作動系統為例分析其故障切換過程。副翼系統共有4 個相同的PCU (如圖6 所示) ,每側副翼由兩個PCU 驅動,控制每個PCU 的ACE 均不同。PCU 的液壓源也不同,內側2 個PCU 用中液壓,外側2 個PCU 用左液壓。每個PCU 有3 種模式: 正常模式、旁通模式和隔斷/阻尼模式(如圖7所示) 。

圖7 B777 飛機副翼作動器原理圖
當低于巡航速度飛行時,相應的ACE 控制副翼PCU 旁通電磁閥和隔斷電磁閥都通電,2 個閥門打開,液壓力作用在模式選擇閥上,閥芯移至右邊(正常模式位置) ,單向伸展及釋壓閥也在液壓力作用下打開。在這種情況下,電液伺服閥在ACE 模擬信號控制下,利用液壓力驅動作動筒伸縮,從而帶動副翼偏轉。當大于等于巡航速度飛行時,飛控計算機通過ACE 控制副翼鎖定以保持氣動外形。ACE 控制所有PCU 的旁通電磁閥通電且隔斷電磁閥斷電,此時PCU 處于正常模式,飛控計算機指令信號傳到電液伺服閥,控制副翼保持在有利氣動外形位置。
當PCU 有單一的液壓或電路故障時,ACE 控制旁通電磁閥斷電且隔斷電磁閥通電,則旁通電磁閥打開而隔斷電磁閥關斷。封閉在旁通單向閥和熱釋壓閥之間的液壓力作用在模式選擇閥上使其移至中間(旁通模式位置) ,同時液壓力也作用在單向伸展及釋壓閥上使其打開。此時模式選擇閥隔斷從電液伺服閥過來的液壓力,作動筒兩個腔室的液壓油經單向伸展及釋壓閥和模式選擇閥自由流動。在這種狀態下,相鄰的PCU 控制副翼偏轉,且帶動失效的PCU 隨動。
當PCU 失去電力或者飛機以大于等于巡航速度飛行時PCU 出現故障,ACE 控制旁通電磁閥和隔斷電磁閥都斷電,液壓力不能到達模式選擇閥,閥芯在內部彈簧力作用下移至左邊(隔斷/阻尼模式位置) ,同時單向伸展及釋壓閥關斷。此時模式選擇閥隔斷從電液伺服閥過來的液壓力,作動筒兩個腔室的液壓油經單向伸展及釋壓閥和模式選擇閥節流孔能單向緩慢流動。在這種狀態下,作動筒不能伸出,但在氣動力作用下能緩慢縮入。
1.3 A320 與B777 作動系統比較
A320 和B777 飛機飛控系統均采用類似的電液伺服作動機構,電控和液動部分均采用了余度設計技術,對不同操縱面的電控邏輯和液壓力布局也基本相同。除擾流板外,其他操縱面均有兩個或以上的作動器,不同作動器的電控部件和液壓力都獨立,當一個作動器故障時,靠剩下的作動器也能保證操縱面的控制。但具體到某個作動器,兩個機型存在一定差異,例如就副翼作動器來說,B777 作動器的結構和功能比A320 的要復雜。B777 飛機能保證某個副翼所有作動器全部失效時,副翼只能下偏,有利于保持機翼氣動外形。
2 維修性分析
民航運輸機要求高可靠性和易于維修,以盡量降低維修成本和因飛機停場維修造成的損失。就現代飛機電傳飛控作動系統來說,其故障涉及機械、液壓、電氣和電子等多方面原因,故障關系錯綜復雜,一旦出現故障,飛機的易維修性具有重要意義。下面分別列舉A320 和B777 飛機各一例作動系統故障進行分析。
2.1 A320 故障案例
故障現象: 某航空公司A320 飛機全天多次出現故障信息“SEC1 MON OR WIRING TO L G ELEV SOL VL V 34CE1”,提示飛控計算SEC 1 監控通道或者計算機至左綠(左內側) 升降舵作動筒(34CE1) 電磁閥之間的線路出現故障。
開始排故過程: 首先根據手冊進行側桿控制操縱面的測試。通過頭頂板斷開ELAC 1、ELAC 2 和SEC2三臺計算機,保留SEC 1 工作,再完成2 個測試:(1) 增壓3 套液壓系統,此時側桿無法操縱升降舵;(2) 只增壓藍液壓系統,此時側桿能操縱升降舵。然后,根據排故程序進行量線,拆卸SEC1 計算機后,測量34CE1 作動筒上電磁閥(SOL VLV2) 電阻約為600 Ω (程序要求40 ~100 Ω) ,超出標準,更換此電磁閥。系統測試檢查正常,排故完畢。
排故總結。與副翼作動系統相比,A320 飛機升降舵作動系統余度更高,如圖2 所示,每個作動筒可以由2 臺計算機控制。作動筒結構也更復雜,電控部件主要包括: 2 個電磁閥(1 個由ELAC 控制,1 個由SEC 控制) 、1 個伺服閥和2 個位置傳感器。由排故結果可知,此案例是SEC 控制的左綠電磁閥故障。當進行第1 個測試時,SEC 1 會給對應的左藍電磁閥斷電使其處于主動模式,同時給左綠電磁閥通電使其處于阻尼模式,但由于該電磁閥故障不能通電,也處于主動模式。這時左升降舵兩個作動筒都處于主動模式,與飛控計算機控制邏輯不符,所以無法操縱升降舵。當進行第2 個測試時,由于只增壓藍系統,此時左綠作動筒沒有液壓自動處于阻尼模式,不會觸發故障,所以能正常操縱升降舵。
2.2 B777 故障案例
故障現象: 一架波音B777 飛機在執行作動器控制電子組件(ACE) 監控測試時,發現有信息代碼為27-130007 的故障。根據故障隔離手冊描述,該故障代碼表示ACE-R 故障,ACE-R 控制的操縱面如圖6 所示。
開始排故過程: 首先更換ACE,不能消除該故障信息,再檢查與ACE 相連的ARINC629 總線,也未找到故障原因。下一步檢查該ACE 控制的各操縱面的動作和指示情況。比較12 號和對稱的3 號擾流板,沒有發現兩者動作情況有明顯差別,但12 號擾流板位置指示有較大誤差。查詢飛行記錄本時發現,大約兩個月前機組曾經報告過12 號擾流板故障,可是在排故檢查工作中該故障消失,系統工作正常; 通過對飛行數據記錄器譯碼也發現,在更早的時間也出現過12 號擾流板PCU 故障。最后檢查12 號擾流板PCU 的電氣插頭時,發現存在液壓油污染問題。將插頭清潔干凈后,接通該系統,故障信息27-130007消失,系統工作和指示恢復正常。
排故總結: 此次B777 飛機擾流板PCU 故障是因PCU 組件液壓油污染,再加上PCU 周圍環境濕度太大而引起的。由于PCU 內部位置傳感器的勵磁線圈采用7 V/1 800 Hz 的低壓高頻交流電,比較容易產生高頻漏電現象,在線圈受到污染和潮濕的環境下,高頻漏電現象將更加嚴重。在這種情況下,勵磁線圈的磁場強度會受到影響,使PCU 反饋給AEC 的擾流板位置信號出現誤差。AEC 內部的監控電路把PCU 反饋回來的位置信號與發出的控制信號進行比較,如果發現偏差超限,就會判斷為系統故障,當執行AEC監控測試時就會觸發故障信息,如27-130007。
3 結論
現代民用飛機廣泛采用電傳飛行控制系統,計算機完成大量的飛行參數和控制規律的計算。飛控及其作動系統采用多余度設計,具有高可靠性,單一故障并不會影響飛機的控制; 系統各通道相互監控,監測到故障能進行隔離和顯示,機務人員根據機載維護系統的故障信息就可以進行簡單有效的維修工作。
[1]陳宗基,秦旭東,高金源.非相似余度飛控計算機[J].航空學報,2005,26(3) :320-327.
[2]王紀森,李志勇,彭博.非相似作動系統建模研究[J].機床與液壓,2008,36(6) :79-81.
[3]楊菊平,陳益.民用飛機飛控計算機的現狀與展望[J].航空計算技術,2007,37(5) :131-134.
[4]沈磊.民用飛機電傳飛控作動系統設計與工程運用[D].上海:上海交通大學電子信息與電氣工程學院,2012.
[5]侯晨光.民用飛機伺服作動系統可靠性方法研究[D].西安:西北工業大學,2007.
[6]付永領,龐堯,劉和松.非相似余度作動系統設計及工作模式分析[J].北京航空航天大學大學學報,2012,38(4) :432-437.
[7]習仁國,劉衛國,陳煥明.電靜液作動器的建模仿真與試驗研究[J].機床與液壓,2013,41(19) :40-44.
[8]范同春,王繼林,王蘭普.液壓油污染對波音777 飛機擾流板PCU 勵磁電路的影響[J].航空維修與工程,2004(6) :49-50.
[9]嚴仰光,秦海鴻,龔春英,等.多電飛機與電力電子[J].南京航空航天大學學報,2014,46(1) :11-18.
猜你喜歡
小哥白尼(軍事科學)(2022年3期)2022-06-09 03:11:24
環球時報(2022-05-30)2022-05-30 15:16:57
民用飛機設計與研究(2020年4期)2020-11-27 17:34:02
汽車維修與保養(2019年7期)2020-01-06 03:30:42
當代陜西(2019年11期)2019-06-24 03:40:28
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
