混合星座條件下的多星定軌及其精度
2015-04-20 02:06:00胡光明李曉杰
測繪科學與工程 2015年2期
關鍵詞:模型
胡光明,郭 睿,李曉杰,吳 杉
北京衛星導航中心,北京, 100094
?
混合星座條件下的多星定軌及其精度
胡光明,郭 睿,李曉杰,吳 杉
北京衛星導航中心,北京, 100094
為了實現與確保區域導航服務能力,COMPASS設計采用GEO/IGSO/MEO混合星座,利用區域監測網完成衛星軌道測定與預報,并通過預報星歷確保導航服務。在區域布站條件下,難以實現對IGSO/MEO衛星的全弧段跟蹤;混合星座條件下,不同衛星的動力學特性存在一定的差異,尤其是首次采用GEO衛星,其靜地特性致使軌道與鐘差強相關,為動力學模型選取帶來一定的困難。這些不利因素都給軌道確定帶來一定的挑戰。本文給出了區域監測網條件下多星定軌的測量模型與動力學模型,設計了軌道與鐘差參數的解算方案,系統地分析與論證了區域布站條件下的混合星座定軌精度。試驗表明,衛星三維位置精度優于2m,基于激光數據檢驗的GEO衛星軌道預報2h視向精度優于0.3m,IGSO衛星軌道預報6h視向精度優于0.4m。
COMPASS系統;多星定軌;衛星激光測距數據;GEO;IGSO;MEO
1 引 言
COMPASS系統采用GEO/IGSO/MEO混合星座設計,以三個頻點碼分多址編碼方式,同時提供導航定位授時(Position-Navigation-Timing, PNT)等基本服務與差分服務[1]。此外,還通過星座中的GEO(Geostationary Earth Orbit)衛星提供短報文通信和位置報告、 雙向定時等RDSS(Radio Determination Satellite Service)服務。
受限于地理分布有限的區域測軌監測網,COMPASS系統無法實現對IGSO/MEO導航衛星軌道的完全覆蓋。在區域監測網內,IGSO(Inclined GeoStationary Orbit)衛星每天約有4個小時不可視,而MEO(Medium Earth Orbit)衛星每天僅有30%的可視弧段,與全球布站的GPS(Global Positioning System)系統相比,有限的跟蹤弧段為高精度軌道測定與預報帶來諸多不利因素。
同時,COMPASS系統混合星座設計中,不同類型的衛星高度、姿態控制方式、衛星平臺和有效載荷均存在一定的差異,為動力學模型的建模帶來一定的挑戰,特別是以太陽光壓模型為主的動力學模型建模誤差,是制約混合星座定軌與預報精度的關鍵因素。
GEO衛星的采用為COMPASS混合星座定軌帶來新的難題。影響GEO衛星定軌精度的因素主要有兩方面:一是高軌衛星的幾何跟蹤條件受到局部跟蹤網的限制,同時GEO衛星的靜地特性使得跟蹤幾何幾乎不變,導致地面站對衛星的動力學約束強度非常弱;二是目前廣泛采用的GEO測軌技術具有較顯著的系統誤差,對定軌誤差影響較大,并且預報精度隨時間衰減較為明顯[2]。
常用的定軌模式包括單星定軌和多星定軌。其中,單星定軌主要利用地面站對單顆衛星測軌數據獨立進行軌道處理,多星定軌可以聯合地面站對所有在軌衛星的測軌數據進行綜合處理。前者由于測軌數據有限,同時,單星條件下不利于各類誤差的分離,因此定軌精度稍低,主要用于衛星入網或機動后快速恢復;后者能夠充分利用整網觀測數據,對衛星鐘差和測站鐘差進行建模或約化處理,同時,對單個測站或單顆衛星的公共誤差進行建模,有利于各類誤差的分離,從而提高定軌精度,是目前最常用的定軌模式。
因此,在區域布站和混合星座的特殊條件下,如何實現COMPASS混合星座的多星整網軌道測定,是一個需要深入研究的問題。本文給出了多星定軌的數學模型,設計了多星整網定軌解算策略,利用實測數據對區域網絡跟蹤條件下的定軌精度進行了分析論證,得到了一些有益的結論。
2 多星定軌原理
為了實現全星座條件下的多星定軌,設計采用中國區域內地面站的偽距、相位無電離層組合觀測量進行綜合處理,在軌道確定的同時,能夠實現對衛星鐘差和測站鐘差的有效估計。
2.1 測量模型及動力學模型
測量型接收機不僅能夠進行偽距觀測,而且可以獲得更高精度的相位數據。因此,多星定軌可以綜合采用偽距與相位數據進行聯合定軌,在軌道確定的同時,實現對衛星鐘差與測站鐘差的估計。多星定軌中一般采用批處理最小二乘方法進行精密軌道確定。
多星定軌采用的數據為偽距、相位雙頻無電離層組合,其觀測方程可以表示為[3]:

(1)

(2)
衛星精密定軌所采用的動力學模型是影響定軌精度的重要因素。衛星動力學模型也稱攝動力模型,用于描述衛星受到的攝動力對衛星運動產生的加速度。衛星受到的攝動力可分為兩大類:保守力攝動和非保守力攝動。其中,保守力攝動又分為N體攝動、與地球引力位相關的攝動、相對論效應攝動三種,與地球引力位相關的攝動又可分為地球形狀攝動、固體潮攝動、海潮攝動、大氣潮攝動、地球自轉形變攝動五類;非保守力攝動包括太陽輻射壓攝動和周期性RTN攝動[4]。對于GEO與IGSO衛星來說,其動力學模型的最大誤差來自于太陽輻射壓模型的誤差。本文在進行精密定軌研究時,采用的主要動力學模型見表1。
表1 動力學模型

攝動力模型N體攝動DE403太陽、行星攝動重力場EIGEN-GRACE02S10×10太陽輻射壓GPST20地球固體潮IERS-Conventions1996經驗力軌道T/N方向調和函數
2.2 定軌解算策略
多星定軌試驗采用國內7個地面站的觀測數據,定軌弧長為3天,數據采樣率為60秒。估計參數包括初始時刻衛星位置、速度,太陽輻射壓攝動系數,輻射壓y-bias,T/N方向經驗力參數,各監測站大氣天頂延遲,相位模糊度以及所有歷元的鐘差參數。
IGS(International GNSS Service)計算表明,采用經驗太陽輻射壓模型可以模制輻射壓對衛星軌道的主要攝動影響,但仍存在一定殘余誤差,因此,精密定軌還需要估計經驗力參數對殘余誤差進行模制。從軌道誤差看,受地面站的約束,軌道徑向誤差可以得到較好的控制,但軌道的沿跡方向和軌道面法向的誤差較難控制,因此,需要在軌道跡向和法向增加經驗力參數加以模制,吸收光壓模型的殘余誤差。
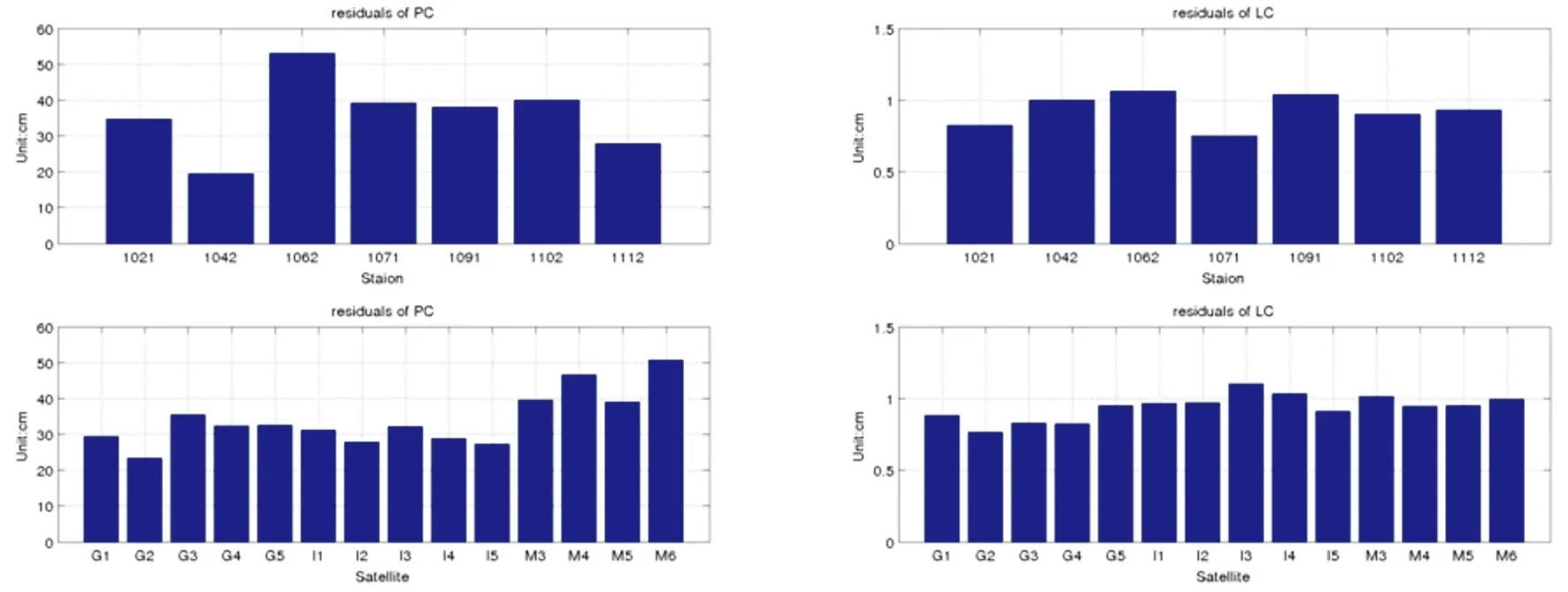
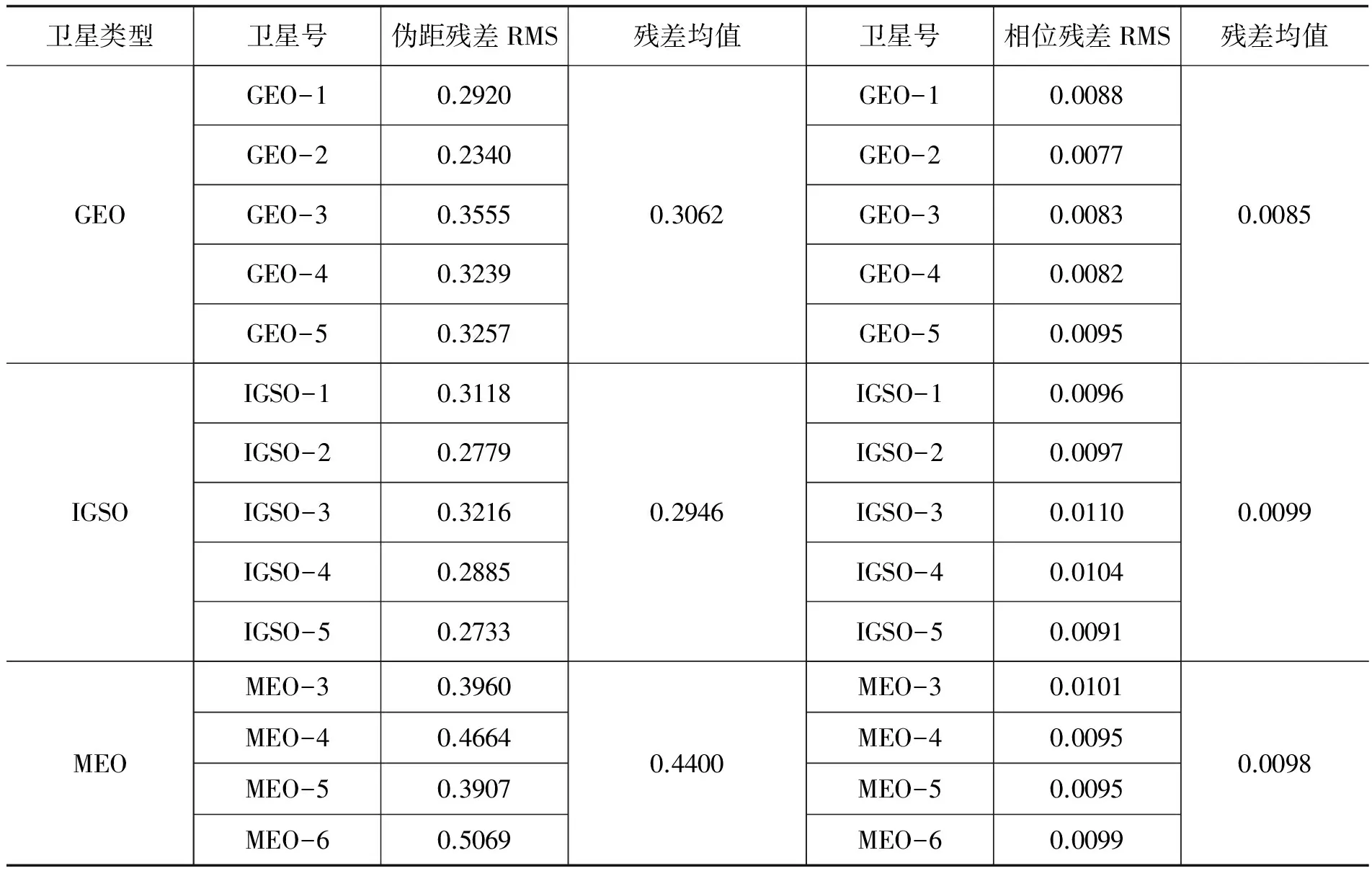
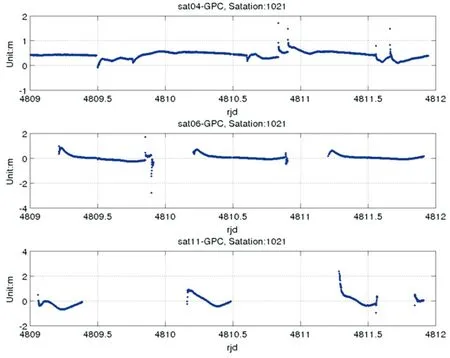
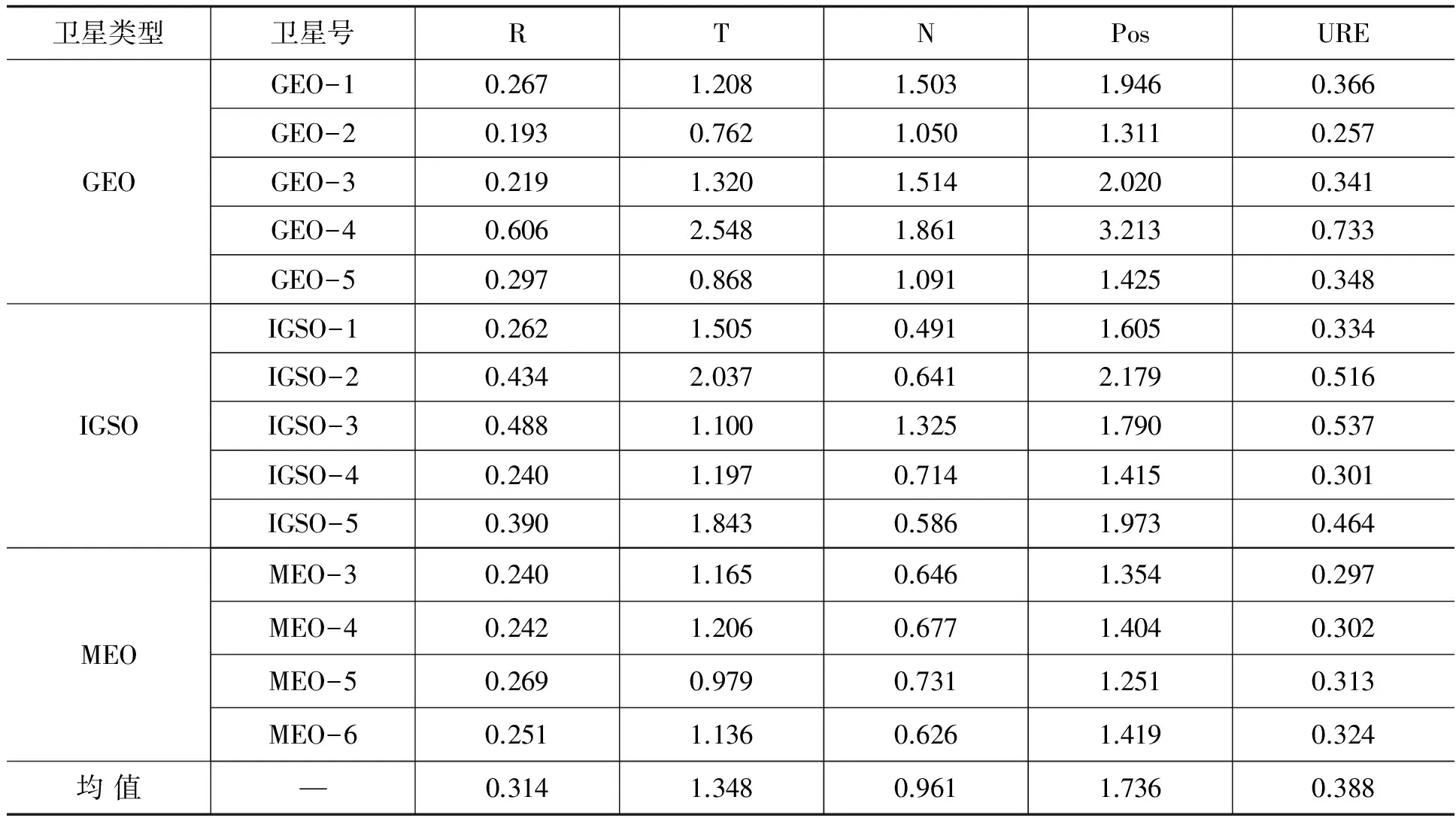
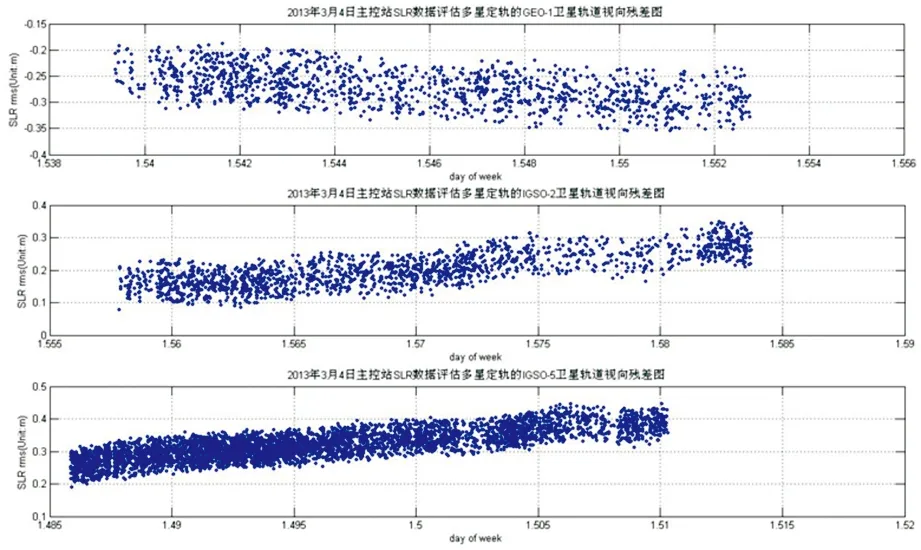
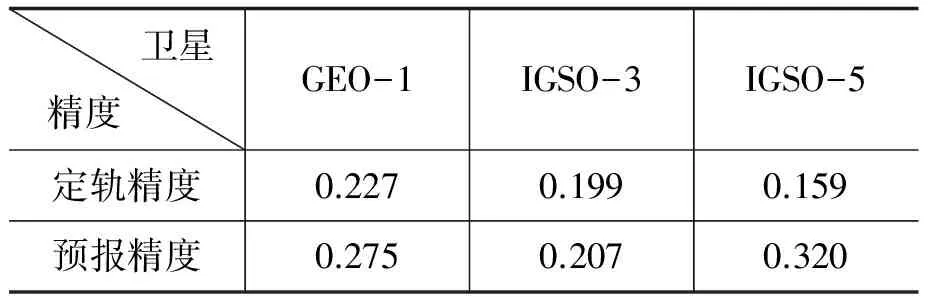
采用多星定軌還可以估計觀測模型參數,如接收機的大氣天頂延遲。由于常用的大氣折射誤差模型SAASTAMOINEN可以較好地模制干大氣折射誤差,而濕大氣部分受局部水汽壓影響較難精確模制,因此,多星定軌一般采用分段估計大氣天頂延遲方式來降低大氣模型誤差對精密定軌的影響。多星定軌估計的大氣參數為大氣模型在常溫常壓下計算修正值的修正因子。假設在3天的定軌弧段內一個接收機估計M個天頂延遲參數,假定某時刻ti滿足ttrop(k) (3) 式中,dt為歸一化的時差參數,trop_ori為采用SAASTAMOINEN模型在常溫常壓下計算的斜路徑大氣折射改正。 xtrop(k)(k=1,…M)為該接收機估計的第k個大氣參數。 ttrop(k)(k=1,…M)為第k個大氣參數對應的時刻。 對大氣參數進行線性化,第ti時刻對第k和k+1個大氣參數偏導數為: (4) 將大氣參數與其他參數一起進行最小二乘平差,可得到大氣估計值。 考慮到衛星鐘差和測站鐘差可能存在不規則變化,多星定軌解算需對衛星鐘差和測站鐘差進行單歷元建模,即每個歷元設置一個衛星或測站鐘差參數。對同一歷元,多星定軌只需要估計M+N(M為衛星鐘差個數,N為測站鐘差個數)個鐘差參數 (實際由于秩虧只能獲得M+N-1個獨立的鐘差參數估計)。而對整個定軌弧段,多星定軌需要估計Nepoch(M+N-1)個鐘差參數, 其中Nepoch為數據歷元數。以60秒數據采樣計算,1天多星定軌需要估計多達1440×(M+N-1)個鐘差參數(未考慮不可視弧段)。 大量鐘差參數的估算需要耗費大量的計算資源,為提高處理效率,多星定軌需采用鐘差約化算法,逐歷元約化鐘差參數。其基本思想是將待估參數分為全局參數和鐘差參數兩類,首先,通過逐歷元對鐘差參數進行約化,消去衛星鐘差和測站鐘差,僅解算所有動力學參數、大氣延遲尺度參數和相位模糊度等全局參數;然后,將全局參數回代解算所有測站鐘差和衛星鐘差,從而減小法方程大小,降低存儲空間,加快求解速度。解算鐘差時需設置基準,原則上可以選取任一定軌測站的站鐘作為時間基準。相關原理詳見文獻[5]。 采用多星定軌方法對COMPASS系統混合星座進行整網處理。采用2013年3月3日~6日共3天弧長的數據進行定軌試驗,在軌衛星包括5顆GEO、5顆IGSO以及4顆MEO,共14顆衛星,地面站共7個站的偽距相位數據參與測定軌。 本文采用內符合與外符合評估相結合的方法對多星定軌精度進行綜合評估。其中,內符合精度評估方法包括定軌殘差和重疊弧段法,外符合精度評估指利用衛星激光測距數據(Satellite Laser Ranging, SLR)評估軌道視向精度的方法。 3.1 定軌殘差精度分析 定軌得到每顆衛星與每個測站的偽距、相位殘差。例如GEO-1衛星,其定軌殘差為7個測站對該星的定軌殘差統計值,參考站的定軌殘差為14顆衛星對該站的定軌殘差統計值。各測站與各衛星的偽距、相位無電離層組合殘差如圖1所示。3天弧段區域網定軌偽距殘差RMS(Root Mean Square)優于50cm,相位殘差RMS優于1cm,與區域GPS網定軌的殘差水平相當。 為進一步分析偽距相位殘差,表2給出了各測站所有14顆衛星在3天定軌弧段內偽距、相位無電離層組合的殘差RMS統計表。 圖1 多星定軌殘差統計結果 表2 衛星多星定軌殘差統計表(單位:m) 衛星類型衛星號偽距殘差RMS殘差均值衛星號相位殘差RMS殘差均值GEOGEO-10.2920GEO-20.2340GEO-30.3555GEO-40.3239GEO-50.32570.3062GEO-10.0088GEO-20.0077GEO-30.0083GEO-40.0082GEO-50.00950.0085IGSOIGSO-10.3118IGSO-20.2779IGSO-30.3216IGSO-40.2885IGSO-50.27330.2946IGSO-10.0096IGSO-20.0097IGSO-30.0110IGSO-40.0104IGSO-50.00910.0099MEOMEO-30.3960MEO-40.4664MEO-50.3907MEO-60.50690.4400MEO-30.0101MEO-40.0095MEO-50.0095MEO-60.00990.0098 圖2 1021站GOE-4、IGSO-1、MEO-3殘差圖 從表2可以看出,所有三類衛星的相位殘差基本處于一個量級,高軌衛星(GEO/IGSO)的偽距殘差也大體相近,而MEO的偽距殘差稍大,其主要原因在于,MEO觀測弧段較短,衛星出入境前后數據質量較差。圖2為1021站GEO-4、IGSO-1及MEO-3的殘差圖,從圖中可以看出,由于區域網無法覆蓋IGSO/MEO衛星的全部軌道,所以該站對IGSO-1與MEO-3衛星的可視弧段均存在空隙。按10°高度角截止,我國境內站每24h對IGSO約有4h的不可視弧段,對MEO衛星約有16h的不可視弧段。比較GEO與IGSO/MEO衛星的殘差還可發現,在IGSO/MEO衛星的出入境弧段,偽距的測量噪聲明顯增大。 3.2 重疊弧段精度分析 重疊弧段精度評估標準反映了兩次定軌的內符度;同時,通過多天重疊弧段的比較,能夠反映定軌的穩定性。評估方法為3天弧段重疊兩天,由重疊弧段在徑向、切向、法向上的誤差(ΔRi,ΔTi,ΔNi),計算得到位置誤差: (5) 以及URE(User Range Error)值(式6適用于GEO/IGSO衛星,式7適用于MEO衛星): (6) (7) 統計得到各離散點處軌道之差的均方根誤差: (8) 作為重疊弧段結果(其中Δσ可以代表R、T、N、Pos、URE中的任一變量含義)。 表3給出了將所有在軌衛星于2013年3月2日~8日共7天的定軌結果進行重疊弧段比較得到的R、T、N、Pos、URE精度。 表3 衛星多星定軌重疊弧段統計表(單位:m) 衛星類型衛星號RTNPosUREGEOGEO-10.2671.2081.5031.9460.366GEO-20.1930.7621.0501.3110.257GEO-30.2191.3201.5142.0200.341GEO-40.6062.5481.8613.2130.733GEO-50.2970.8681.0911.4250.348IGSOIGSO-10.2621.5050.4911.6050.334IGSO-20.4342.0370.6412.1790.516IGSO-30.4881.1001.3251.7900.537IGSO-40.2401.1970.7141.4150.301IGSO-50.3901.8430.5861.9730.464MEOMEO-30.2401.1650.6461.3540.297MEO-40.2421.2060.6771.4040.302MEO-50.2690.9790.7311.2510.313MEO-60.2511.1360.6261.4190.324均值—0.3141.3480.9611.7360.388 可以發現,多星定軌算法穩定,所有衛星徑向重疊弧段精度(均值)優于0.4m,位置精度優于2m,URE精度優于0.4m。還可以看出,各衛星T、N方向的誤差明顯大于R方向誤差,其原因在于,我們所采用的是中國境內站數據,所有跟蹤站均偏于一側所致。 3.3 衛星激光測距檢驗軌道視向精度分析 通過衛星激光測距手段,獲得由地面站至衛星間的幾何距離常被用作外符合手段對軌道視向精度進行評估。該測量方法通過測量地面發射與接收激光信號之間的時差進行距離測量,其測量手段決定了激光數據對衛星與接收機鐘差不敏感。同時,由于激光測距的信號頻率較高,傳播路徑上的介質時延量級比較小且可以較精確模制(厘米級),因此可以采用SLR進行軌道精度評估。具體步驟是:對激光測距觀測值進行測站和衛星偏心改正、大氣折射誤差修正得到誤差修正后的觀測值O;利用多星定軌解算衛星軌道和激光站坐標可以計算給定時刻激光雙程距離理論值C,將計算O-C得到激光數據的殘差作為軌道的視向精度。 圖3給出了2013年3月4日利用北京的激光數據評估多星定軌的軌道視向精度殘差圖,其中3幅子圖分別表示GEO-1、IGSO-3、IGSO-5共3顆衛星的軌道視向精度殘差圖。由于廣播星歷的更新周期是1h,考慮到IGSO衛星每天存在約4h的出境弧長,故本文采用激光數據評估GEO衛星預報2h、IGSO衛星預報6h的軌道視向精度。 圖3 SLR評估多星定軌不同衛星視向精度殘差圖 可以看出,GEO衛星預報2h、IGSO衛星預報6h的SLR軌道視向精度均優于0.4m,不同衛星的激光測距殘差有所差別,各衛星定軌弧段及預報弧段的SLR評估結果RMS均值詳見表4。 表4SLR評估的多星定軌視向精度(單位:m) 衛星精度GEO-1IGSO-3IGSO-5定軌精度0.2270.1990.159預報精度0.2750.2070.320 本文深入研究了COMPASS系統導航衛星多星軌道確定的特點與困難,詳細給出了混合星座條件下導航衛星多星軌道確定的測量模型與動力學模型,設計了軌道與鐘差參數的解算策略,并分別使用內符合評估法(定軌殘差法、重迭弧段法)及外符合評估法(衛星激光測距檢驗軌道視向精度評估法)對多星定軌精度進行了分析與評估。試驗及分析結果表明:區域網混合星座條件下,多星定軌偽距殘差優于0.5m,相位殘差優于1cm;重疊弧段精度在徑向優于0.4m,位置精度優于2m;激光檢驗的軌道視向精度優于0.4m。 [1]北斗衛星導航系統官網.北斗衛星導航系統簡介[EB/OL]. [2010-01-15].http://www.beidou.gov.cn/xtjs.html. [2]GuoRui,HuXiaogong,TangBo,etal.Preciseorbitdeterminationforthegeostationarysatellitewithmultipletrackingtechiques[J].Chin.Sci.Bull., 2010,55(6):428-434. [3]周善石.基于區域監測網的衛星導航系統精密定軌方法研究[D].上海:中國科學院上海天文臺,2011. [4]DepartmentofDefense.GlobalPositioningSystemStandardPositioningServicePerformanceStandard[EB/OL].[ 2008-09-15].http://www.gps.gov/technical/ps/2008-SPS-performance-standard.pdf. [5]周善石.區域衛星導航系統GEO/IGSO混合星座的精密定軌和時間同步[J].中國科學G輯: 物理學 力學 天文學,2011,54(6): 1089-1097. The Multi-satellite Precise Orbit Determination and It’s Accuracy for COMPASS Hybrid Constellation Hu Guangming, Guo Rui, Li Xiaojie, Wu Shan Beijing Satellite Navigation Center, Beijing 100094,China In order to realize and ensure COMPASS regional navigation system services, COMPASS system adopts a hybrid constellation composed of GEO, IGSO and MEO, completes orbit determination and prediction by a regional tracking network and ensure navigation services through forecasting ephemeris. It is difficult for the regional tracking stations to make whole-arc tracking for IGSO/MEO. Meanwhile, for the hybrid constellation condition different type of satellites have differences in dynamic characteristics. Especially GEO satellites are first adopted for navigation purpose, whose stationary characteristics leads to the orbit and clock strongly correlated, which brings certain difficulty for selecting dynamic model parameters. This paper proposes a measurement model and a dynamic model for orbit determination in regional tracking network, designs a multi-satellite precise orbit determination (MPOD) for solving orbit and clock parameters simultaneously and analyzes the radial accuracy of hybrid constellation in regional stations. The experiments show that the 3-dimensional position accuracy is better than 2m, the radial accuracy of 2-hour orbital prediction for GEO satellites based on laser data validations is better than 0.3m and the accuracy of 6-hour orbital prediction is better than 0.4m. COMPASS system; multi-satellite precise orbit determination(POD); satellite laser ranging (SLR) data;geostationary earth orbit (GEO);inclined geostationary orbit (IGSO);medium earth orbit (MEO) 2015-03-16。 國家自然科學基金資助項目(41204022), 上海市空間導航與定位技術重點實驗室基金資助項目(12DZ2273300)。 胡光明(1974—),男,工程師,主要從事衛星導航數據處理和精密定軌方面的研究。 P228 A3 多星定軌試驗及精度分析
4 小 結
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
