基于AIS信息的船舶航跡帶尺度確定與分析
2015-04-18 08:03:26肖進麗牟軍敏
武漢理工大學學報(交通科學與工程版) 2015年6期
關鍵詞:船舶
周 翠 肖進麗 牟軍敏
(武漢理工大學航運學院1) 湖北省內河航運技術重點實驗室2) 武漢 430063)
0 引 言
航跡帶尺度是港口和航道規劃、設計及建設的一個重要參數[1],現階段國內外對船舶航跡帶尺度的研究,主要有實船試驗、模擬研究、理論計算等方法[2].但實船試驗方法所要求的實驗條件較高、風險大、成本高,且無法測得船舶在不同風、流(大小、方向)組合條件下的各種數據;理論計算方法難以全面考慮各種因素,且一些因素難以量化;而船模試驗方法對一些量(風、流、拖船增減)的設定可能與實際情況存在著較大的出入.船舶自動識別系統(automatic identification system,AIS)是一種已得到廣泛應用助航設備,該系統不僅能自動接收處理來自他船的操縱和船位信息,對他船進行識別、檢測和跟蹤,而且可在無人介入的情況下,主動地向合適的岸臺、其他船舶或航空器提供實時連續、詳細完整的航行狀態信息和其他與安全有關的信息[3].利用船舶AIS所記錄的實時反映船舶動態的航行信息(船長、船寬、船首向、航跡向、航跡點的經緯度等)計算船舶航跡帶尺度可有效解決其他方法成本高、難量化、推廣性低等問題[4].目前國內外對船舶航跡帶尺度的確定主要依賴相關規范和標準[5-6],基于航跡帶尺度的研究尚不多見,且大多以船舶模擬器試驗為基礎[7-8].已有一些學者利用 AIS數據對船舶航跡帶尺度進行研究,陸吉慶[9]通過采集港口水域船舶AIS數據,利用回歸分析方法確定了大型船舶航跡帶寬度、轉彎半徑與船長、船寬、載重噸、吃水、風流等因素的關系;曾昆[10]利用AIS數據對廈門港附近大型船舶航跡帶度、轉彎半徑進行了統計分析,但其都未利用AIS數據對航跡帶尺度進行定量計算.
本文基于實船觀測的AIS數據,擬合出所選取直線與轉彎船舶航跡段的方程,運用船舶航跡帶尺度模型,計算出航跡帶的主要尺度(航跡帶寬度和轉彎半徑),推算出船舶的漂移系數n的取值范圍,并通過將計算所得結果與現行的《海港總體設計規范規范》(JTS 165-2013)(以下簡稱《規范》)中的規定進行對比分析以判別其可行性.
1 航跡帶尺度模型
1.1 基于AIS航跡帶寬度模型的建立
船舶航跡帶寬度為船舶在航道內航行時,由于受到航道斷面、導助航設施、外界自然條件和人為因素的影響,為了保證航向其航行軌跡在航道中線左右擺動,呈蛇形前進所占用的寬度.航跡帶寬度由2個部分組成,船舶航行中在航跡線左右的偏移量;船舶本身占用的航道空間.
1.1.1 航跡偏移量
船舶航跡偏移量為船舶在航跡線附近蛇形前進所占用的空間.通過確定船舶航行時的航跡線,求出船舶航跡點在航跡線兩側的最大偏距之和,即得到船舶航跡偏移量.本文利用船舶AIS數據擬合出直線航段航跡線方程,利用點到直線的距離公式求得每個船位點至擬合直線的距離Dpi,找到擬合直線兩側各點至直線的最大距離和D-pmax,相加即可得出航跡偏移量A1,即

圖1為船舶航跡線擬合示意圖.圖1中,黑色曲線為船舶航跡點組成的航跡線,黑色直線為擬合的航跡線.
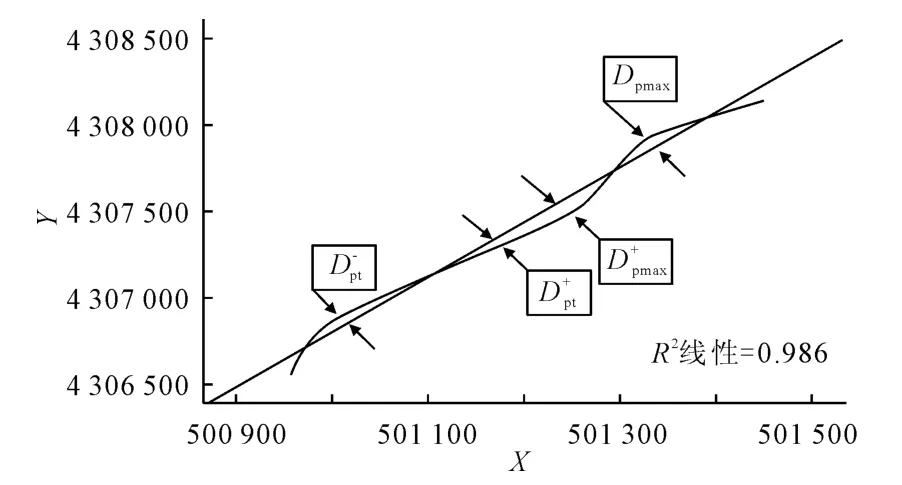
圖1 船舶航跡線擬合示意圖
1.1.2 船舶本身占用空間
船舶本身占用空間,為船舶在航行過程某一刻所掃過水域范圍的大小,它可以理解為船舶在航跡線法線上的投影,圖2船舶所占空間示意圖.
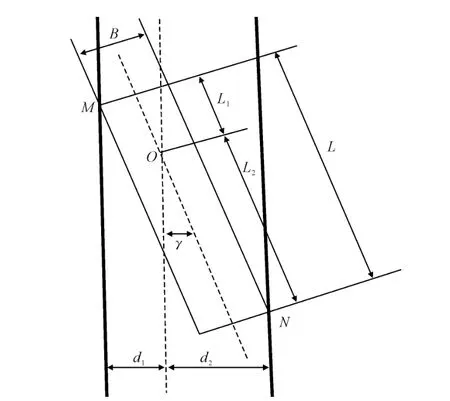
圖2 船舶占用空間示意圖
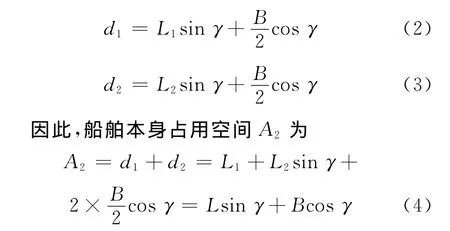
其中:M,N分別為船首、船尾的最外緣點;O為AIS設備在船上的安裝位置;d1,d2分別為某觀測時刻船首、船尾最外緣點M,N至航跡向的距離;L1,L2分別為船首和船尾至船載AIS設備O的距離;L和B為船舶的長度和寬度;γ為船舶航行當時的風流壓差角.由圖2可得:
1.1.3 船舶漂移系數
如上文所述,船舶航跡帶寬度A為船舶航跡偏移量A1和船舶本身航行時占用空間A2之和,根據《規范》船舶航道的航跡帶寬度A的經驗公式為

式中:n定義為漂移系數;L為船長;B為船寬;γ為船舶航行時的風流偏壓角.結合式(5),(6)可推導出:

綜上,利用觀測船舶記錄的AIS數據(航跡向COG、船首向HDG、船長及船寬;其中風流偏壓角γ可由船首向和航跡向的差值得到),即可計算出船舶航行航跡帶寬度和漂移系數.
1.2 轉彎半徑模型
船舶AIS可每2s更新一次船舶實時船位信息(經緯度),通過轉彎航段船舶的經緯度點,利用最小二乘法擬合曲線即可求得船舶的轉彎半徑.最小二乘法是通過最小化誤差平方和的方式來尋找數據的最佳匹配函數.利用最小二乘法擬合圓的半徑和圓心坐標的方法如下.
設樣本點為(Xi,Yi),i∈(1,2,…),擬合圓心與半徑為(A,B)和R,點(Xi,Yi)到圓心的距離為di:

點(Xi,Yi)到圓邊緣距離的平方與半徑平方之差為
Q(a,b,c)分別對a,b,c求偏導,令偏導等于0,得
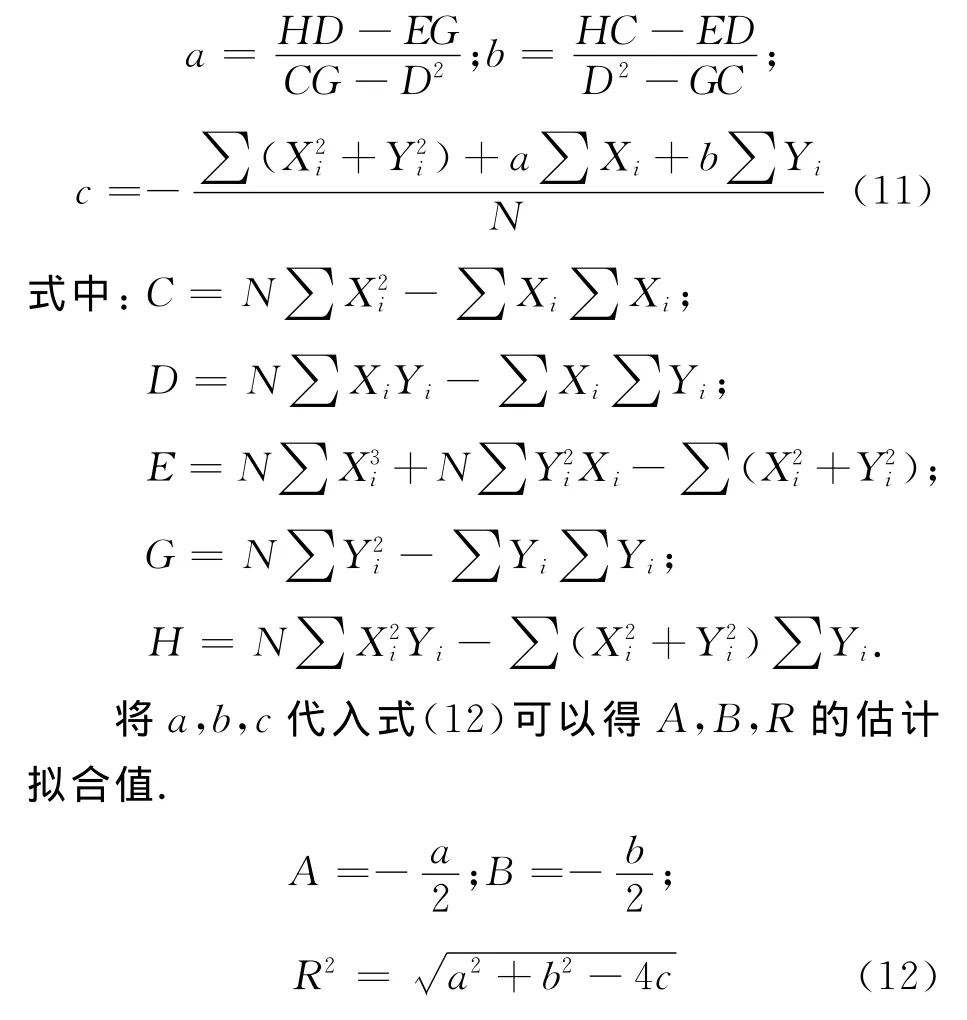
按照上述原理進行C語言編程,將所選擇的航跡點輸入到程序,運行即可得到所選航跡點的擬合圓半徑及圓心坐標.
2 基于AIS信息確定航跡帶尺度實例
2.1 基于AIS數據的船舶航跡點繪制
本文所需的實測船舶AIS數據有:(1)動態數據:船舶位置(經度、緯度)、航跡向COG、船艏向HDG;(2)靜態數據:船長、船寬.表1為本研究實測船舶的基本信息;表2為實測船舶AIS記錄的經緯度轉換后的坐標.
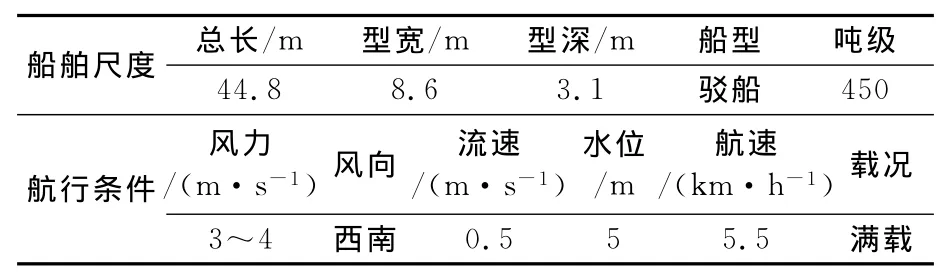
表1 實測船舶基本信息
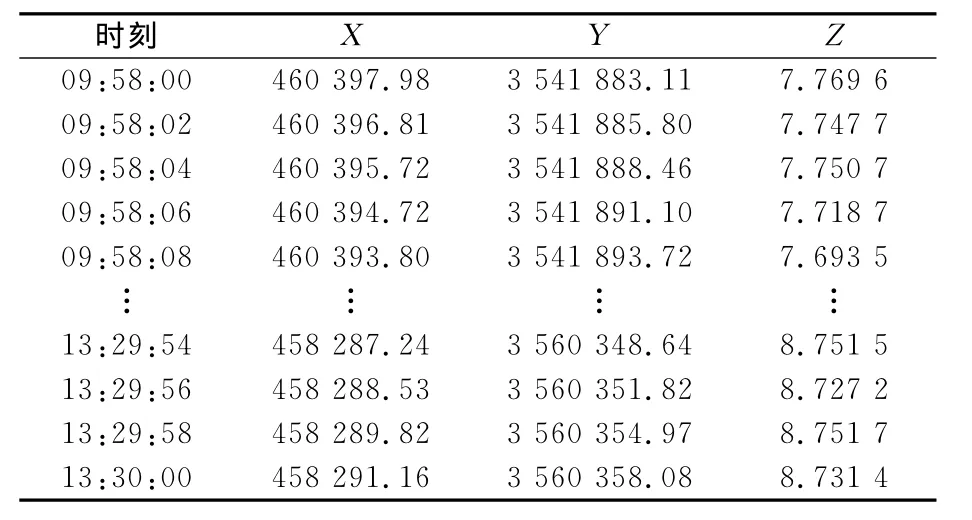
表2 實測船舶AIS記錄的經緯度轉換后的坐標
將表2轉換后的AIS經緯度坐標導入到SPSS中,得到該船舶在航道內的航跡線,見圖3.
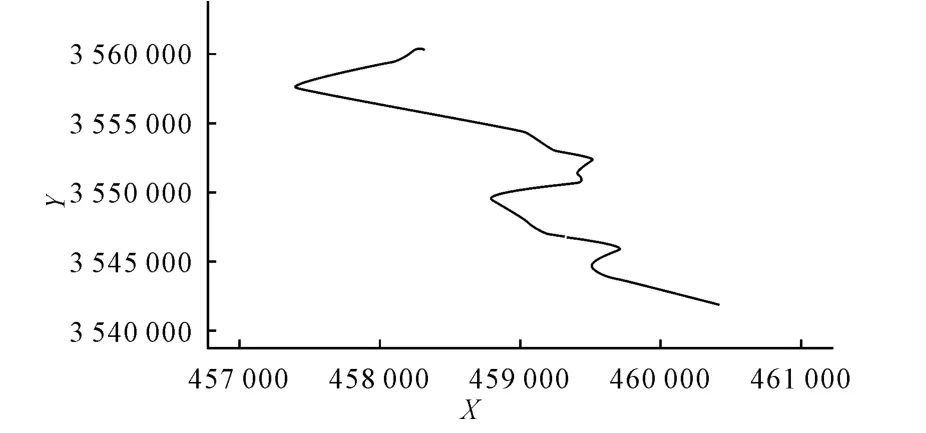
圖3 實測船舶航跡線(SPSS)
2.2 航跡帶尺度的確定
2.2.1 航跡帶寬度
1)航跡線回歸方程 截取09:58:00到10:00:30時間段實測船舶AIS記錄的航跡點經緯度,運用SPSS軟件對其進行線性擬合,見圖4,擬合直線系數見表3.
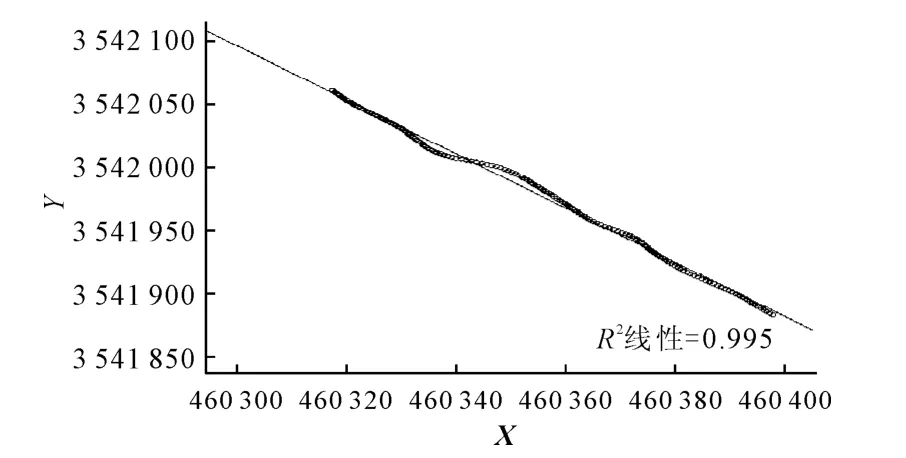
圖4 直線航跡線擬合

表3 回歸系數
根據表3,該區段航跡線回歸方程可表示為

2)回歸方程檢驗結果 為驗證航跡回歸方程的可靠性,對其進行可信度檢驗.擬合方程相關系數檢驗、F檢驗、t檢驗的結果見表4.

表4 相關系數、F、t檢驗結果匯總
由表4可知,相關系數r=0.997,表明兩變量線性相關程度極高;擬合方程常數與變量系數t檢驗與F檢驗的顯著性概率Sig.都為0<0.05,表明回歸效果顯著,下面即利用該擬合結果計算觀測船舶的航跡偏移量.
3)船舶航跡帶寬度及船舶漂移系數的確定航跡偏移量A1為擬合直線兩側航跡點至該直線最大的距離和最小距離之和,利用點到直線的距離公式,求出各航跡點到擬合航跡線的距離.設直線外一點 P(x0,y0),直線l:Ax+By+C=0,AB≠0,則點到直線距離d=,各點至擬合直線距離如圖5所示.由圖5可得,點到直線的最大正距離為+2.940m,最大負距離為-3.289m,因此該航段的船舶偏移量A1為6.229m.
船舶本身占用空間寬度A2為船舶在航行過程的某一刻,船舶所掃過水域范圍的大小,參照表3船舶基本信息可得A2≈10.335m.
由式(5)和(7)可分別計算出船舶航跡帶寬度A=16.564m及船舶漂移系數n≈1.601.
隨機選取其他4段直線航段,重復上述步驟,分別計算出航跡帶寬度及漂移系數,結果見表5.
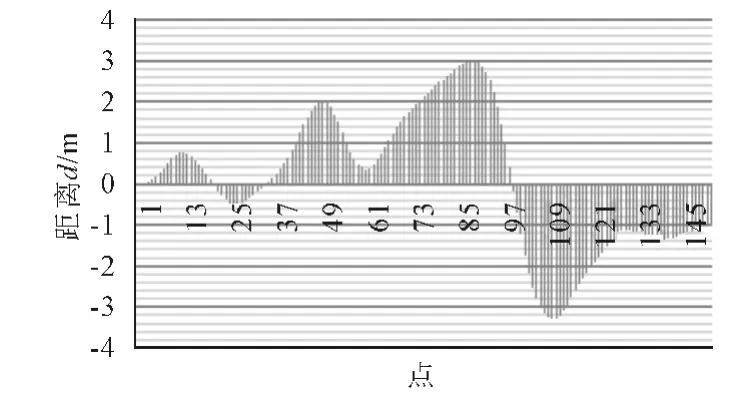
圖5 點到擬合直線距離
表5結果顯示,在該時間段觀測船舶的航跡帶寬度的范圍為16.298~18.057m,漂移系數n的范圍為1.575~1.745.

表5 不同航跡段的航跡帶寬度及漂移系數
2.2.2 轉彎半徑的確定
截取10:38:40到10:48:40時間段船舶 AIS記錄船舶航跡點的經緯度,將這些點導入到CAD中,運用最小二乘法編程對這些點進行擬合,圓心坐標(a,b)及半徑r如下.

將擬合圓心和半徑輸入到CAD中,如圖6所示;按照上述相同的步驟可計算出了該實測船舶航跡線及轉彎段的轉彎半徑,將實測船舶航跡線直線段與轉彎段所計算出的擬合方程相結合,可得到該實測船舶的完整航跡帶尺度,見圖7.

圖6 轉彎航跡線擬合圖
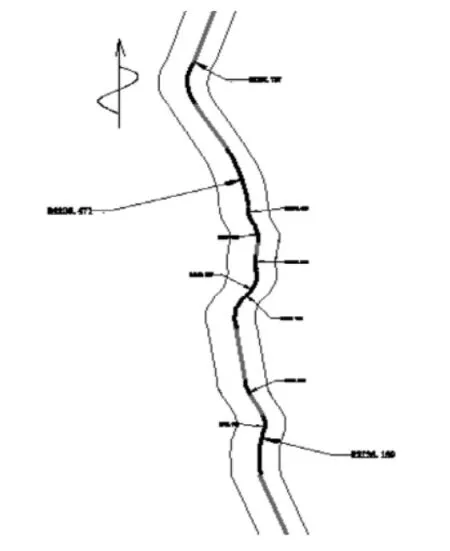
圖7 實測船舶航跡帶尺度
3 結果對比分析
3.1 航跡帶寬度對比分析
《規范》中給出了滿載船舶漂移系數n與風、流偏壓角γ的經驗值,見表6.
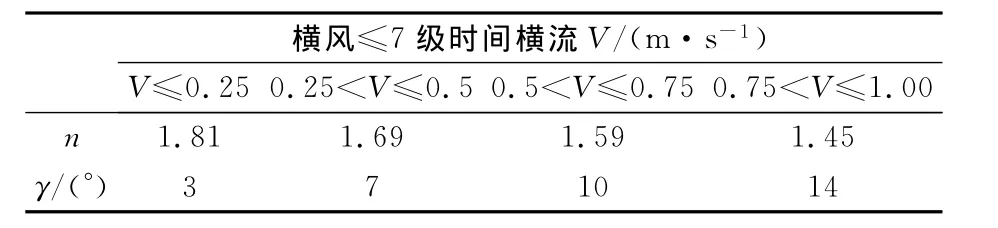
表6 滿載船舶漂移系數n和風、流壓偏角γ的關系
在航行條件流速V=0.5m/s,風流偏壓角γ=7°的情況下,利用AIS數據計算所得的漂移系數范圍為1.575~1.745,在同等條件下《規范》所規定漂移系數n=1.69上下波動,但整體上偏小,其原因在于實測的風流偏壓角γ較7°大.
3.2 轉彎半徑對比分析
《規范》認為航道轉彎半徑的大小,應根據轉向角φ和設計船長L 確定:當10°<φ<30°,r=(3~5)L;當φ>30°,r=(5~10)L.利用實測船舶AIS數據計算所得的船舶航跡帶轉彎半徑,r=788.747m,船舶的船長L=44.8m,即

與《規范》中所規定的航道轉彎半徑r(最大為10L)相比,本文計算出的船舶航跡帶彎曲半徑較為偏大.究其原因,主要是本文用于AIS數據分析的觀測船舶并非航行于該航道的最大代表船型,而對于船舶航行來說,航道彎曲半徑越小航行越困難,因此,《規范》中所規定的航道轉彎半徑對于本文所使用的觀測船舶安全過彎來說,其值有一定富裕.
4 結束語
本文利用實測船舶AIS數據,通過對船舶航跡帶進行回歸分析確定了航跡帶寬度、轉彎半徑及船舶漂移系數的取值范圍.所得結果與《規范》中相關規定對比分析,表明該方法是可行的.在利用船舶AIS數據對船舶航跡帶尺度進行研究的過程中,存在一些不足與局限,如所采集的實測船舶的AIS數據有限,只計算出一條船舶在流速V=0.5m/s航行條件下的航跡帶寬度和轉彎半徑,若能得到不同船型不同風、流下的觀測船舶的AIS數據,所得結果將會更具代表性,且更有價值;在計算航跡帶寬度時,利用不同數量的航跡點擬合直線方程,所計算出的航跡帶寬度和船舶漂移系數存在一定差異,下一步研究將致力于發掘航跡點數與航跡帶寬度及漂移系數之間的規律.
[1]于家根.港口水域航道合理規劃設計研究[D].大連:大連海事大學,2008.
[2]陳 偉.大型集裝箱船進出港行道寬度模擬實驗研究[D].武漢:武漢理工大學,2010.
[3]劉 暢.船舶自動識別系統(AIS)關鍵技術研究[D].大連:大連海事大學,2013.
[4]PHILIPP L,CHRISTIAN B,MARTIN H,et al.Comprehensive analysis of automatic identification system (AIS)data in regard to vessel movement prediction[J].Journal of Navigation,2014,67(5):791-809.
[5]中華人民共和國交通部.JTS 165-2013海港總體設計規范[S].北京:標準出版社,2013.
[6]中華人民共和國交通部.GB50139-2004內河通航標準 [S].北京:標準出版社,2004.
[7]徐言民,榮祥斌,劉明俊.失控船拖帶系統建模與航跡帶模擬研究[J].中國航海,2008,31(2):126-129.
[8]索永峰,楊神化,陳國權,等.基于AIS航海模擬器目標船服務器的設計與實現[J].中國航海,2014,37(1):43-47.
[9]陸吉慶.港口水域航跡寬度和操縱參數的回歸分析[D].大連:大連海事大學,2010.
[10]曾 昆.基于實態的船舶航跡帶寬度和操縱參數的研究[D].遼寧:大連海事大學,2009.
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:08:26
艦船科學技術(2022年14期)2022-09-22 03:07:40
機械工業標準化與質量(2022年6期)2022-08-12 02:07:42
艦船科學技術(2022年2期)2022-03-29 01:12:44
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
軍工文化(2017年12期)2017-07-17 06:08:06
中國船檢(2017年3期)2017-05-18 11:33:09
船海工程(2015年4期)2016-01-05 15:53:30