基于分車型限速的高速公路可變限速控制方法*
2015-04-18 08:03:02張存保夏銀霞
武漢理工大學學報(交通科學與工程版) 2015年6期
張存保 周 斌 江 周 夏銀霞
(武漢理工大學智能交通系統研究中心1) 武漢 430063)(武漢理工大學水路公路交通安全控制與裝備教育部工程研究中心2) 武漢 430063)
0 引 言
限制車速是保障高速公路安全、高效運行的重要手段.目前我國高速公路大多采用固定限速方式,不能根據道路條件、交通狀況等進行動態調整[1].為克服固定限速方式存在的不足,可變限速控制(variable speed limits)技術逐步發展起來.可變限速控制一方面可降低車速離散程度,減小因車速差導致的事故風險[2-3],另一方面,通過可變限速方式調節各路段交通流量,緩解或消除瓶頸路段的交通擁堵狀況[4-5].
近年來,國內外學者對可變限速控制技術進行了廣泛研究,取得了一定成果.Heydecker等[6]根據英國M25高速公路交通檢測數據,對不同可變限速值下交通流參數進行了統計分析,并建立了相應的速度—密度關系模型.結果表明,可變限速控制對高速公路速度—密度關系以及通行能力會產生較大影響.王薇等[7]將高速公路主線可變限速控制看作是離散時間的馬爾可夫決策過程,提出了基于強化學習與有限階段馬爾可夫決策的可變限速控制模型,并開展了仿真實驗.劉慶全等[8]提出了一種基于模糊邏輯的高速公路可變限速控制方法和模型,將當前路段流量偏差和流量變化量作為狀態變量,建立了相應的模糊控制規則庫,但模型中對各路段交通流的動態關聯性考慮不夠充分.Jalil等[9]提出了一種基于簡單規則的瓶頸路段可變限速控制方法,并在美國密蘇里州270號公路進行了實際應用,結果表明,可變限速控制會對流量-密度關系曲線產生影響,且不同地點的交通擁堵減少時間存在一定差異.李志斌等[10]闡述了瓶頸路段通行能力下降現象與通行效率的關系,針對不同類型瓶頸提出了相應的可變限速控制策略.張樂飛[11]在已有宏觀交通流模型基礎上引入速度調解率系數,將其作為控制變量建立可變限速控制模型,對高速公路瓶頸區域上游路段實施分區間可變限速聯動控制,能有效地抑制瓶頸區域產生的交通波向上游快速傳播,可在一定時空范圍內有效地緩解和消除交通擁堵.
綜上所述,國內外學者在高速公路可變限速控制的理論研究和工程應用方面均取得了階段性成果.但現有可變限速控制模型主要針對分路段限速方式,即一條路段上所有車輛采用同一限速值.由于不同類型車輛在動力性能、操控性能等方面存在一定差異,
對于一條路段上的某個動態限速值,小汽車通常會選擇接近限速值的速度行駛,但大貨車受動力性能制約其實際行駛速度可能明顯低于當前限速值,使得兩類車輛車速差異較大.同時,現有可變限速控制模型假定所有車輛均以當前限速值作為期望車速,未考慮不同車型的行駛速度特性,導致控制模型與實際交通現象存在一定差異,從而降低了模型精度和控制效果.考慮到不同車型的差異性,國內外部分高速公路采用了分車型限速方式,即同一路段上不同類型車輛采用不同的限速值(通常分為小客車、大中型客車、貨車等類型),但對于分車型可變限速控制方法尚缺乏研究.當同一路段上不同類型車輛的車速差異較大時,或相鄰路段上某種車輛的車速差較大時,通過調節指定類型車輛的限速值,減小車速差和車輛換道次數,使得高速公路交通流更加均衡,從而提高通行效率和安全性.為此,本文在現有可變限速控制技術基礎上,研究并建立基于分車型限速的可變限速控制方法和模型,實現高速公路限速值的動態精細化調控,為實際工程應用提供理論和技術支持.
1 可變限速控制系統組成
可變限速控制系統主要包括以下組成部分:交通流檢測器、可變限速控制軟件、可變限速標志、通信網絡等.交通流檢測器采集各路段流量、車速、車型、密度等數據;可變限速控制軟件根據交通流檢測器數據,對高速公路實時交通狀態進行估計和預測,并確定各路段最佳限速值;可變限速標志用于發布各路段的當前限速值,實現對高速公路交通流的動態調節;通信網絡用于各組成部分之間的數據傳輸,如將交通流檢測器數據傳輸到可變限速控制軟件.
在可變限速控制系統的實際應用中,首先需要將整條高速公路劃分為路段,然后確定交通流檢測器、可變限速標志等的布設方案.綜合考慮系統建設維護成本、交通流特性、駕駛員行為等因素,路段長度通常為5~10km(可根據道路情況適當調整),每條路段上布設一組可變限速標志.由于一條路段上交通流并非均勻分布,為提高可變限速控制模型精度,需要將路段進一步細分為單元,每個單元長度一般為500~1000m,并在每個單元上布設一組交通流檢測器.由于單元長度較小,可將單元內交通流視為均勻分布.
2 高速公路可變限速控制模型
2.1 高速公路動態交通流模型
動態交通流模型用于描述高速公路交通流狀態隨時間、空間變化情況以及與交通控制變量之間的關系.國內外學者先后提出了多種形式的動態交通流模型,如 LWR 模型[12]、Payne模型[13]、METANET模型[14]等.其中 METANET模型應用最為廣泛,該模型可準確描述高速公路交通流的動態傳播過程,其表達式為[15]
交通流量方程:
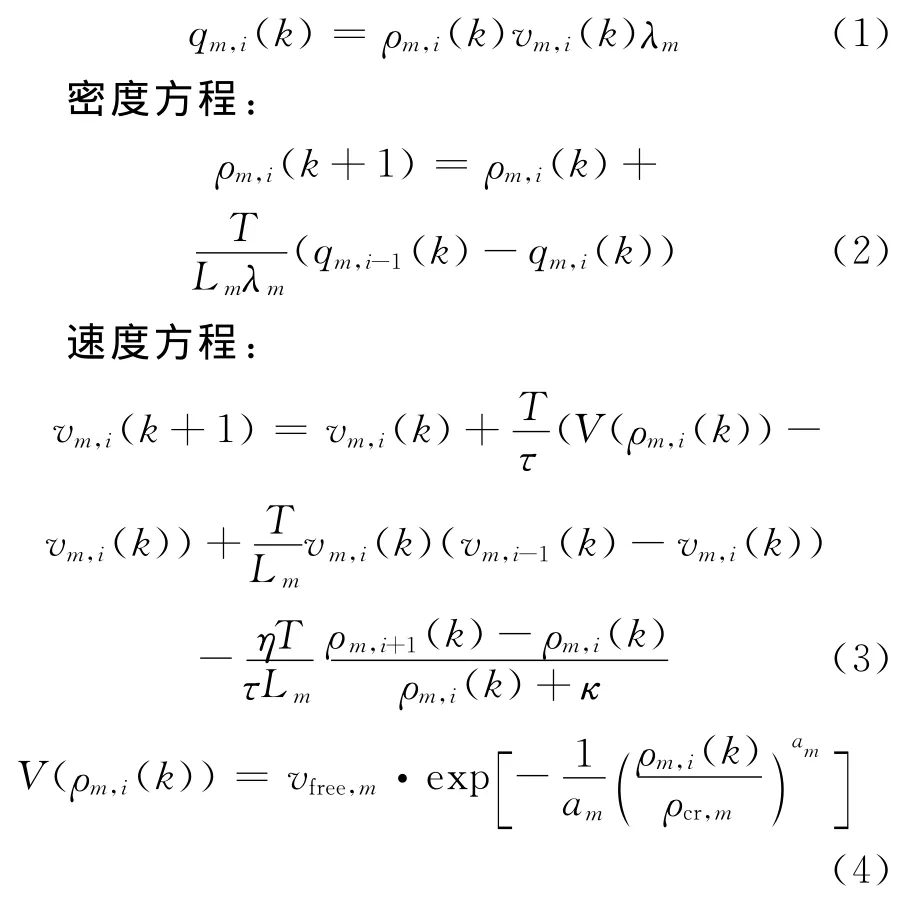
式中:qm,i(k)為k時段內駛出路段m 第i單元的交通流量;ρm,i(k)為k時段路段m 第i單元的交通流密度;vm,i(k)為k時段路段m 第i單元的平均速度;λm為路段m 的車道數;Lm為路段m 上各單元 的 長 度;ρcr,m為 路 段m 的 臨 界 密 度;vfree,m(k)為路段m 的自由流速度;T 為控制時間步長(通常取10~20s);τ為因前方交通流密度變化導致的滯后時間;η,κ,am為模型參數.
考慮到可變限速控制對車輛行駛速度的影響,文獻[5]將期望車速由式(4)改進為
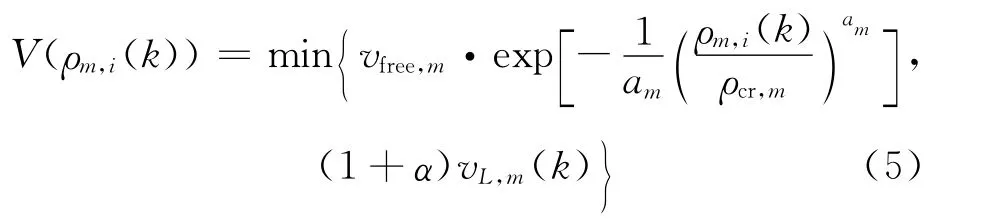
式中:vL,m(k)為k時段路段m 的限速值;α為不遵守可變限速控制的車輛比例.
2.2 基于分車型限速的動態交通流模型
在前文介紹的經典METANET模型中,每個路段在任一時刻只有一個限速值(即分路段限速方式),不適用于分車型限速方式.為此,本文對METANET模型加以改進,建立基于分車型限速的動態交通流模型.
假定車輛類型數為C,各類型車輛分別用各自的交通流狀態變量(交通流量、密度、和速度)加以描述.由于各類型車輛的長度不同,采用車輛長度折算方式計算各車型交通流對總體交通流的影響.假定以車型1作為基準車型(通常為小型客車),其長度為,則有:

式中:ρm,i,total(k)為k時段路段m 第i單元上全部車輛的等效密度;ρm,i,c(k),(k)分別為k時段路段m第i單元上車型c的等效密度和實際密度.
公式(1)~(3)改進為
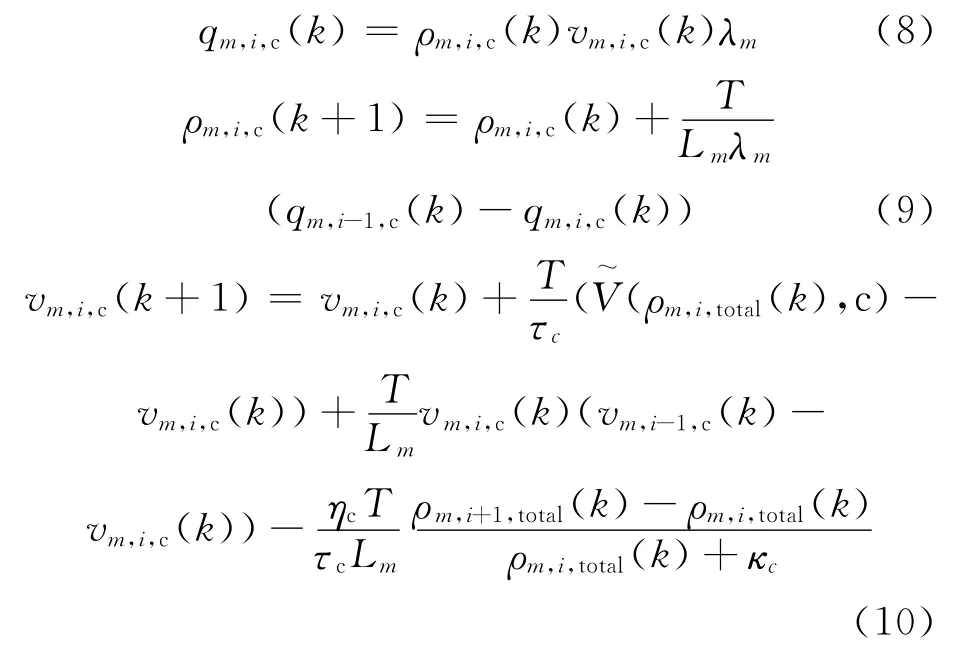

式中:vfree,m,c為路段m 上車輛類型c的自由流速度;vcr,m為路段m 的臨界車速;ρmax,m為路段m 的最大密度.由式(11)可見,當總體等效密度低于臨界密度時,交通流處于暢通狀態,各車型期望車速主要取決于該車型的自由流速度及總體交通流密度;當總體等效密度高于臨界密度時,因車流密集導致無法自由換道或超車,各車型期望車速主要取決于總體交通流密度和臨界車速,與車型種類關系不大(即其各車型期望車速趨于一致).
考慮到可變限速控制對各種類型車輛行駛速度的影響,將式(11)改進為

式中:vL,m,c為k時段路段m 上車型c的限速值.
2.3 高速公路可變限速控制模型及求解
2.3.1 分車型可變限速控制模型
高速公路可變限速控制的優化目標是使控制周期內所有車輛的行駛里程之和最大,其目標函數如下
式中:Np為控制周期與控制時間步長T的比值(即控制周期等于NpT.實際應用中,控制周期通常取5~10min).
約束條件:
1)最大車速約束 可變限速值不得超過所在路段上各車型固定限速值的上限,即

2)相鄰路段車速差約束 為保證交通流的平順性,相鄰路段之間同一車型的限速值差異不宜大于20km/h[16],即

3)可變限速值波動幅度約束 為避免因限速值急劇變化給駕駛員行為和交通流穩定性帶來的沖擊,同一路段相鄰控制周期內可變限速值波動幅度不宜大于20km/h,即

4)同一路段不同車型之間限速差約束 為保證交通安全,同一路段上不同車型的限速值差不超過30km/h,即

2.3.2 模型求解
可變限速控制模型求解的實質是找到各路段可變限速值的優化組合方案,使得目標函數值達到最大,是典型的組合優化問題,可采用禁忌搜索算法進行求解.具體算法可參考文獻[17].
3 實驗分析
選取隨岳高速公路湖北境內一條32km長的路段作為研究對象,該路段為單向3車道,采用分車型限速方式,各車型的限速值分別為:小客車110km/h、大中型客車100km/h、貨車90km/h.根據實際觀測數據,研究路段的車型比例為小客車占65%,大中型客車占9%,貨車占26%.以5.0km為單位將高速公路劃分為6個路段(各路段編號依次為1,2,3,4,5,6),第1個路段前方和第6個路段后方各有1km左右路段作為連接路段.將6個研究路段按照1 000m間隔劃分為5個單元,其中路段4有一個入口匝道和一個出口匝道,見圖1.

圖1 實驗路段示意圖
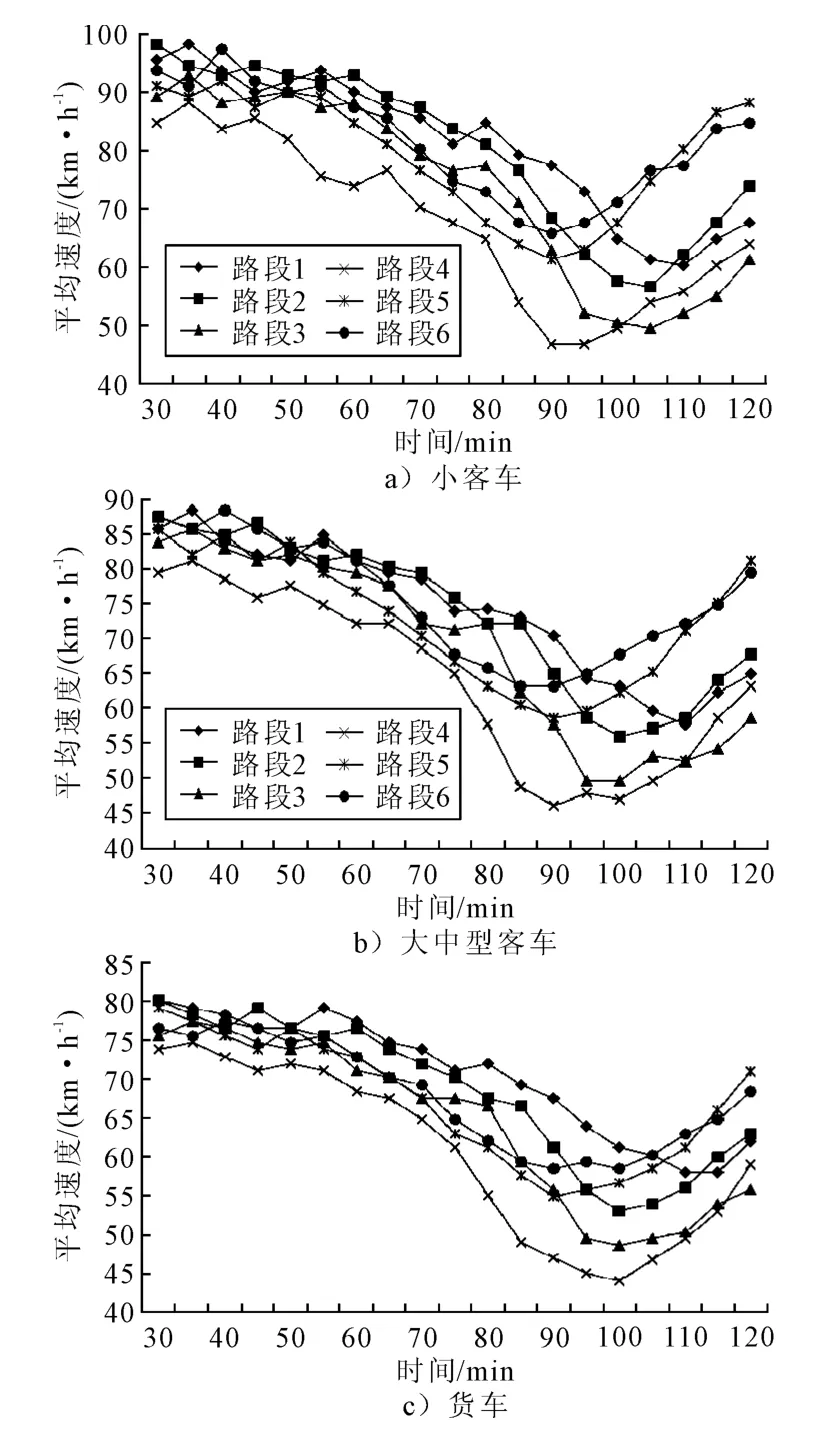
圖2 固定限速方式下平均速度變化情況
利用Vissim軟件開展交通仿真實驗,仿真時長為9 000s(考慮到交通流量加載過程,僅選取30~120min的仿真結果數據).可變限速控制模型的時間步長T取為20s,控制周期為5.0 min.利用VB 7.0編程實現可變限速控制模型和求解算法,并通過Vissim軟件的COM接口對各路段的期望車速值進行動態調整,從而實現可變限速控制模型與高速公路交通流狀態的實時交互和動態優化.在此基礎上,分別對固定限速方式和分車型可變限速控制方式進行了仿真實驗,其結果見圖2~3.
車輛總體行駛里程和平均行程車速見表1.
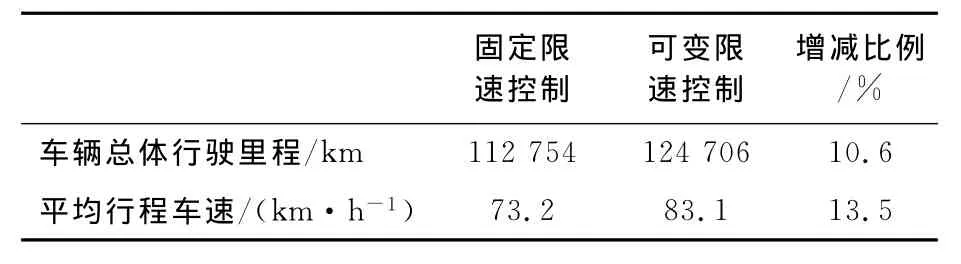
表1 車輛總體行駛里程和平均行程車速
從實驗結果可以看出:
1)可變限速控制可減小各路段之間的車速差,促進交通流趨于均勻、平順狀態,從而提高通行效率和安全性.與固定限速方式相比,可變限速控制下相鄰路段最大車速差從15.9km/h降至8.4km/h,降幅為47.2% ;車輛總體平均行程速度從73.2km/h升至83.1km/h,提高了13.5%;車輛總體行駛里程從112 754km增加到124 706 km,增加了10.6%.
2)可變限速控制可有效緩解高速公路瓶頸路段的交通擁擠程度,減少交通擁堵持續時間.在固定限速方式下,路段4在第75min~100min出現了擁堵情況,最低車速降至44.0km/h;在可變限速控制方式下,雖然路段4在第80min~100min有車速下降情況,但并未出現明顯擁堵,最低車速保持在60.0km/h以上.
3)分車型可變限速控制方式可充分考慮各車型在動力性和操控性等方面的差異.在低密度交通流情況下各車型行駛速度接近其自由流速度(不超過各車型的固定限速值),以提高通行效率;隨著交通流密度增加,各車型行駛速度差異逐漸縮小,且當交通流密度大于臨界密度時,各車型速度趨于一致,從而提高道路交通安全性.
4 結束語
不同類型車輛在動力性、操控性等方面存在較大差異,因此,分車型限速方式具有其合理性和適用性.在經典METANET模型基礎上,針對分車型可變限速控制需求,提出了改進的動態交通流模型,并建立了基于分車型限速的可變限速控制模型和求解算法.仿真實驗表明,與固定限速方式相比,分車型可變限速控制可提高車輛平均速度、減小各路段車速差,并能有效緩解瓶頸路段的交通擁擠狀況.
本文中對可變限速控制條件下不同類型駕駛員車速控制行為未做充分考慮,對高速公路多車型混合交通流特性也未做深入研究.上述問題將在后續工作中做進一步研究和完善.
[1]余 凱,張存保,石永輝.基于多元因素的高速公路可變限速值計算方法研究[J].交通信息與安全,2011,29(1):4-7.
[2]MOHAMED A A,JEREMY D,LIANG H.Applying variable speed limits and the potential for crash migration[C].The 85th Annual Meeting of the Transportation Research Board, Washington, D.C.,USA,2006.
[3]LIN P,KANG K P,CHANG G L.Exploring the effectiveness of variable speed limit controls on highway work-zone operations[J].Journal of Intelligent Transportation Systems,2004,8(3):155-168.
[4]PAPAGEORGIOU M,KOSMATOPOULOS E,PAPAMICHAIL I.Effects of variable speed limits on motorway traffic[J].Journal of Transportation Research Record,2008,2047:37-48.
[5]HEGYI A,SCHUTTER B D,HELLENDOORN H.Model predictive control for optimal coordination of ramp metering and variable speed limits[J].Transportation Research Part C:Emerging Technologies,2005,13(3):185-209.
[6]HEYDECKER B G,ADDISON J D.Analysis and modelling of traffic flow under variable speed limits[J].Transportation Research Part C,2011,19(2):206-217.
[7]王 薇,楊兆升,趙丁選.有限階段馬爾可夫決策的可變限速控制模型[J].交通運輸工程學報,2011,11(5):109-114.
[8]劉慶全,黃春平.高速公路主線可變限速模糊控制及仿真研究[J].計算機仿真,2010,27(12):334-338.
[9]JALIL K,PRAVEEN E,CARLOS S.Operational analysis of freeway variable speed limit system:case study of deployment in Missouri[C].The 92th Annual Meeting of the Transportation Research Board,Washington D.C.,USA,2013.
[10]李志斌,金茂菁,劉 攀,等.提高高速公路通行效率的可變限速控制策略[J].吉林大學學報:工學版,2013,43(5):1204-1209.
[11]張樂飛.高速公路瓶頸路段可變限速控制方法研究[J].北京交通大學學報,2012,36(5):78-83.
[12]LIGHTHILL M J,WHITHAM G B.On kinematic waves:a theory of traffic flow on long crowded Roads[C].Proceedings of the Royal Society,London,Series A,1955,229:317-345.
[13]PAYNE H J.Models of freeway traffic and control[J].Mathematical Models of Public Systems,1971(1):51-61.
[14]MARKOS P,JEAN M B,HABIB H S.Modelling and real-time control of traffic flow on the southern part of boulevard peripherique in Paris:Part I:Modelling[J].Transportation Research Part A,1990,24(5):345-359.
[15]RODRIGO C C,IOANNIS P,MARKOS P,et al.Variable speed limits as a mainline metering device for freeways[C].The 89th Annual Meeting of the Transportation Research Board,Washington D.C.,USA,2010.
[16]何 勇,唐琤琤.道路交通安全技術[M].北京:人民交通出版社,2008.
[17]王 凌.智能優化算法及其應用[M].北京:清華大學出版社,2001.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
建材發展導向(2021年20期)2021-11-20 05:43:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小學閱讀指南·低年級版(2017年11期)2017-12-06 15:14:59
光學精密工程(2016年6期)2016-11-07 09:07:19
中國交通信息化(2016年9期)2016-06-06 07:42:10
核科學與工程(2015年4期)2015-09-26 11:59:03
小說月刊(2014年4期)2014-04-23 08:52:20
河南科技(2014年18期)2014-02-27 14:15:06