墻板生產(chǎn)線中模具車測距及防碰撞系統(tǒng)開發(fā)
2015-04-17 12:15:46李炳燃朱振杰
實(shí)驗(yàn)室研究與探索 2015年5期
馮 升, 萬 熠, 李炳燃, 朱振杰, 張 東
(1.山東大學(xué) 高效潔凈機(jī)械制造教育部重點(diǎn)實(shí)驗(yàn)室,山東 濟(jì)南 250061;2.齊魯醫(yī)院,山東 濟(jì)南 250012)
?
·儀器設(shè)備研制與開發(fā)·
墻板生產(chǎn)線中模具車測距及防碰撞系統(tǒng)開發(fā)
馮 升1, 萬 熠1, 李炳燃1, 朱振杰1, 張 東2
(1.山東大學(xué) 高效潔凈機(jī)械制造教育部重點(diǎn)實(shí)驗(yàn)室,山東 濟(jì)南 250061;2.齊魯醫(yī)院,山東 濟(jì)南 250012)

針對墻板自動化生產(chǎn)線中模具車在行走以及養(yǎng)護(hù)排隊(duì)過程中的碰撞問題,在單片機(jī)及PLC硬件平臺上開發(fā)了模具車智能測距及防碰撞系統(tǒng)。該系統(tǒng)采用超聲波測距模塊進(jìn)行距離信息的采集,并實(shí)時(shí)地傳送給單片機(jī),經(jīng)單片機(jī)處理后,將距離顯示在LCD上,并利用LED燈對不同的距離范圍進(jìn)行不同的信號預(yù)警,同時(shí)通過PLC及變頻器控制電機(jī),實(shí)現(xiàn)模具車制動以及在養(yǎng)護(hù)系統(tǒng)中較為精確距離定位,防止發(fā)生碰撞。實(shí)驗(yàn)驗(yàn)證表明:該系統(tǒng)有效地解決了模具車的碰撞問題,可確保墻板生產(chǎn)的安全性和可靠性,且成本低。
模具車; 單片機(jī); 超聲波測距; LCD顯示; 防碰撞
0 引 言
近年來,隨著建筑工業(yè)化進(jìn)程的推進(jìn),墻板的需求量越來越大,為了提高墻板生產(chǎn)的效率,墻板的自動化生產(chǎn)線便應(yīng)運(yùn)而生[1]。生產(chǎn)線主要有裝模、攪拌注漿、養(yǎng)護(hù)、拆模等生產(chǎn)環(huán)節(jié)組成,而模具車就穿梭于各個(gè)生產(chǎn)環(huán)節(jié)之間,將各個(gè)生產(chǎn)環(huán)節(jié)緊密地連接在一起,是墻板從注漿到凝固成型,再到拆模成品整個(gè)生產(chǎn)過程中重要的運(yùn)輸工具,通過自動化控制來實(shí)現(xiàn)整條生產(chǎn)線有條不紊的流水作業(yè)。
由于生產(chǎn)線中軌道布置較為復(fù)雜,模具車在軌道中也常有快速、慢速、啟停等移動狀態(tài),加之生產(chǎn)流水線上模具車較多,因此模具車極易發(fā)生碰撞問題。并且在養(yǎng)護(hù)系統(tǒng)中,模具車需要移動排隊(duì),并要求保持不小于50 cm的安全距離。因此為了防止模具車發(fā)生碰撞并實(shí)現(xiàn)較為準(zhǔn)確的距離定位,就需要對模具車進(jìn)行測距及防碰撞制動,這也是實(shí)現(xiàn)墻板自動化生產(chǎn)和保證生產(chǎn)安全性和可靠性的前提,生產(chǎn)線的平面布置圖如圖1所示。
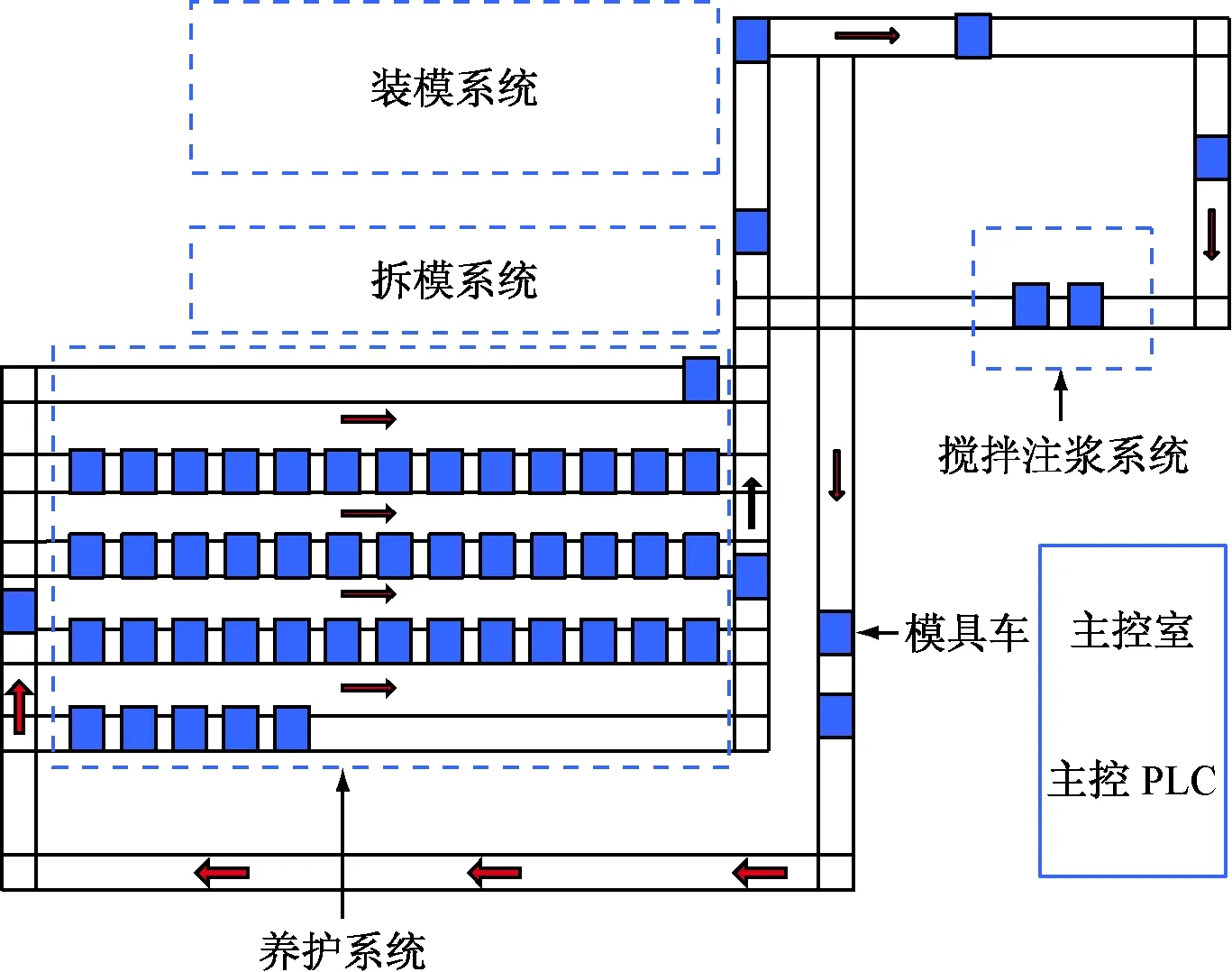
圖1 墻板生產(chǎn)線的平面布置示意圖
目前,工業(yè)中常用的測距技術(shù)主要有激光測距、紅外測距和超聲波測距等技術(shù),其中超聲波測距是一種利用超聲波的可定向發(fā)射、方向性好、在介質(zhì)中傳播距離較遠(yuǎn)等特性,結(jié)合電子計(jì)數(shù)等微電子技術(shù)來實(shí)現(xiàn)的非接觸式檢測方式。超聲波測距在使用中不受光線、電磁波、被測物體的顏色等因素影響[2-4],加之成本較低,易于做到實(shí)時(shí)控制,因此在工業(yè)生產(chǎn)中應(yīng)用較多。
因此在墻板自動化生產(chǎn)線中,采用超聲波測距技術(shù),基于單片機(jī)的控制開發(fā)了模具車智能測距及防碰撞系統(tǒng)。該系統(tǒng)利用超聲波測距模塊進(jìn)行距離檢測,并實(shí)時(shí)地在LCD上顯示,同時(shí)根據(jù)距離的范圍分別控制紅黃綠三盞LED燈進(jìn)行信號預(yù)警。實(shí)際生產(chǎn)線中,模具車的動力驅(qū)動是三相交流異步電機(jī),到達(dá)需制動距離時(shí),單片機(jī)會自動給出制動信號,由PLC及變頻器來控制電機(jī)的制動及停止,防止模具車發(fā)生碰撞,在養(yǎng)護(hù)系統(tǒng)中還可以實(shí)現(xiàn)較為精確的距離定位,本系統(tǒng)可推廣到眾多生產(chǎn)線的移動小車控制中。
1 超聲波測距原理
超聲波測距原理如圖2所示,簡單描述為超聲波發(fā)射器向某一方向發(fā)射超聲波,在發(fā)射時(shí)刻的同時(shí)開始計(jì)時(shí),超聲波在空氣中傳播,碰到障礙物就立刻返回來,超聲波接收器收到反射波并轉(zhuǎn)化為電信號就立即停止計(jì)時(shí)。
這樣,只要測出發(fā)送和接收時(shí)間差t,即可求出距離:
s=Ct/2
(1)
式中,C為超聲波在空氣中的傳播速度,其與環(huán)境溫度T的關(guān)系式如下:

(2)
由此可知,聲速與溫度有著密切的關(guān)系,因此檢測的距離在一定程度上也會受到溫度的影響。如對測距有特殊的精度要求,則必須進(jìn)行溫度補(bǔ)償[3-5]。
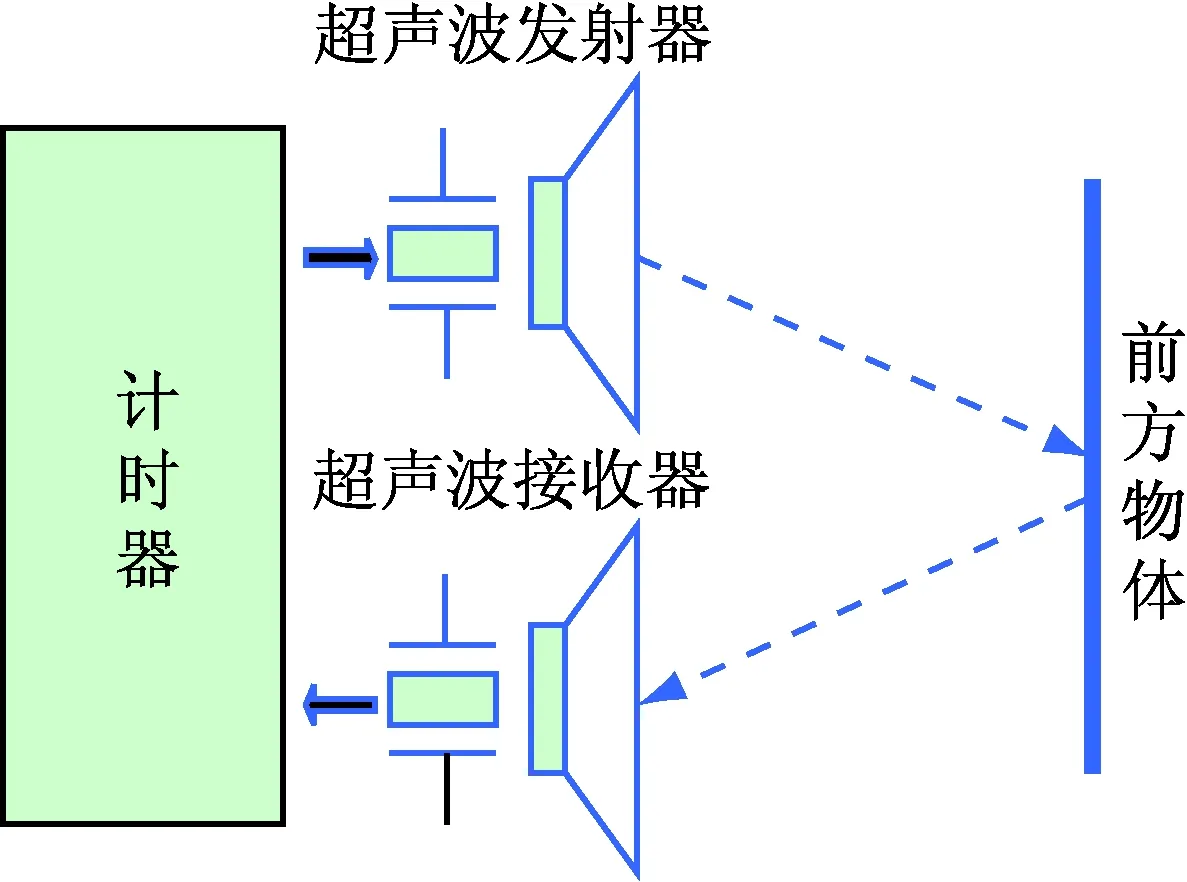
圖2 超聲波測距原理
2 系統(tǒng)設(shè)計(jì)
本文設(shè)計(jì)的模具車智能測距及防碰撞系統(tǒng)主要由單片機(jī)處理器、超聲波測距模塊、LCD顯示模塊、LED警示模塊、電機(jī)控制模塊組成,系統(tǒng)的總體工作結(jié)構(gòu)如圖3所示。由于模具車可能正向行走,也可能反向行走,因此每輛模具車在車頭和車尾各部署一個(gè)超聲波測距模塊,系統(tǒng)整體設(shè)計(jì)如下。

圖3 模具車智能測距及防碰撞系統(tǒng)模擬圖
超聲波測距模塊將被測物體與模具車的距離信息通過串口通信輸入Arduino單片機(jī),單片機(jī)處理后在LCD顯示屏上顯示出距離數(shù)值,并由紅黃綠三盞燈來提示距離的范圍,當(dāng)距離大于100 cm時(shí),綠燈亮,表示安全距離,模具車可以正常行駛;當(dāng)距離≥100 cm時(shí),黃燈亮,表示模具車需減速準(zhǔn)備制動;當(dāng)距離到達(dá)50 cm時(shí),紅燈亮,表示模具車需立即制動停止。實(shí)際生產(chǎn)線中模具車要求留出至少50 cm的安全距離,考慮到模具車較重,在行駛過程中慣性較大,故提前100 cm就需要及時(shí)減速,以備在距離到達(dá)50 cm時(shí),模具車已經(jīng)達(dá)到隨時(shí)停止的安全速度,以備及時(shí)制動停止。模具車的減速制動是利用PLC和變頻器控制電機(jī)來實(shí)現(xiàn)的[6],當(dāng)測距達(dá)到100 cm時(shí),單片機(jī)會自動給PLC一個(gè)開關(guān)量輸入,此時(shí)PLC便會通過變頻器控制電機(jī)減速,并在50 cm內(nèi)實(shí)現(xiàn)兩個(gè)速段的減速,達(dá)到停止速度;當(dāng)測距達(dá)到50 cm時(shí),此時(shí)單片機(jī)會再給PLC一個(gè)開關(guān)量輸入,PLC直接控制電機(jī)停轉(zhuǎn),模具車停止。
3 硬件設(shè)計(jì)
3.1 超聲波測距模塊
本系統(tǒng)所采用的是US-100超聲波測距模塊,它可以實(shí)現(xiàn)2~450 cm的非接觸測試功能,擁有2.4~5.5 V的寬電壓輸入范圍,靜態(tài)功率消耗低于2 mA,自帶溫度補(bǔ)償對測距結(jié)果進(jìn)行校正,測距精度可達(dá)0.3 cm,同時(shí)具有GPIO、串口等多種通信方式,內(nèi)帶看門狗,工作穩(wěn)定可靠。此模塊有UART(串口)模式和電平觸發(fā)模式,本系統(tǒng)利用的是電平觸發(fā)模式,5Pin接口的接線圖如圖4所示[7]。
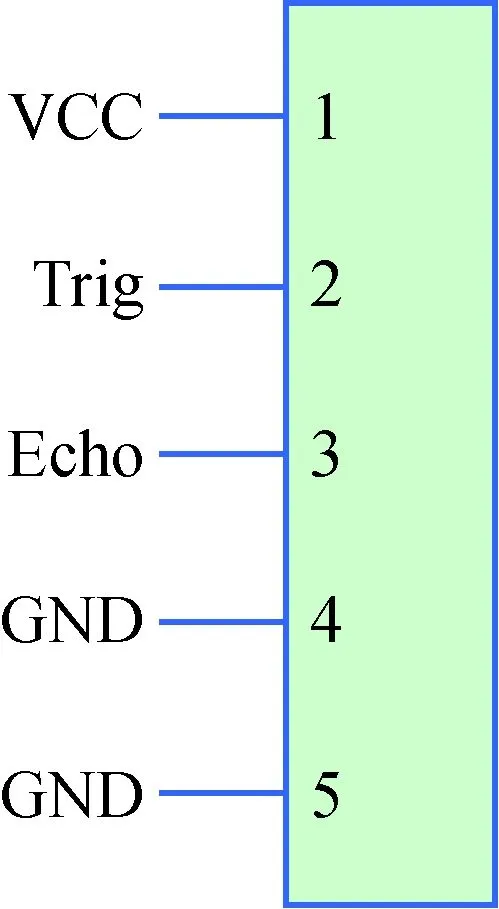
圖4 5Pin接口接線圖
模塊工作原理如下:
(1)采用單片機(jī)IO口觸發(fā)模塊Trig管腳,給至少10 μs的高電平信號。
(2)觸發(fā)Trig管腳后,模塊會自動發(fā)送8個(gè)40 kHz的方波,然后自動檢測是否有信號返回。
(3)當(dāng)有信號返回時(shí),模塊進(jìn)行溫度的測量,然后根據(jù)當(dāng)前溫度對測距結(jié)果進(jìn)行校正,將校正后的結(jié)果通過Echo管腳輸出,同時(shí)模塊Echo管腳輸出一個(gè)高電平,高電平持續(xù)的時(shí)間就是超聲波從發(fā)射到返回的時(shí)間。
(4)單片機(jī)根據(jù)式(1)計(jì)算距離s,由于已進(jìn)行溫度補(bǔ)償,故C=340 m/s[8]。
該模塊在模具車的車頭和車尾各布置1個(gè),對模具車的前后距離都進(jìn)行實(shí)時(shí)檢測。
3.2 Arduino單片機(jī)
本系統(tǒng)設(shè)計(jì)在單片機(jī)的選擇上考慮了需求、功耗、成本、尺寸、穩(wěn)定性和開發(fā)難易程度等因素,采用的單片機(jī)是Arduino nano 3.0(ATmega328)。它有14個(gè)數(shù)字IO口,其中6個(gè)(3、5、6、9、10、11)可提供8位PWM輸出;有8個(gè)模擬IO口,工作電壓是5 VDC[9]。
單片機(jī)在系統(tǒng)中的作用主要有:①控制超聲波發(fā)射電路發(fā)射超聲波,控制接收電路檢測超聲波,并接收回波信號;②接收電路接收到信號,利用內(nèi)部定時(shí)器來計(jì)算超聲波從發(fā)射到返回的時(shí)間;③在顯示模塊上顯示所測得距離值;④控制LED燈根據(jù)距離范圍進(jìn)行顯示;⑤給PLC開關(guān)量信號,控制電機(jī)減速、停止。
3.3 模具車電機(jī)控制模塊
實(shí)際生產(chǎn)線中模具車的控制是通過PLC和變頻器控制三相交流異步電機(jī)實(shí)現(xiàn)的,所選用的PLC為西門子S7-200,CPU為CPU226(DC/AC/Relay),變頻器為西門子MM440,其核心部件是CPU單元,根據(jù)設(shè)定的參數(shù),經(jīng)過運(yùn)算輸出控制正弦波信號,再經(jīng)過SPWM調(diào)制,放大輸出正弦交流電驅(qū)動三相異步電動機(jī)運(yùn)[10-11]。控制接線圖如圖5所示,在系統(tǒng)實(shí)現(xiàn)的功能是:當(dāng)超聲波測距到100 cm時(shí),PLC接到單片機(jī)的開關(guān)量信號,然后控制變頻器使電機(jī)減速,在50 cm內(nèi)通過延時(shí)一定的時(shí)間自動實(shí)現(xiàn)兩級降速,當(dāng)測距到達(dá)50 cm時(shí),PLC控制電機(jī)停止轉(zhuǎn)動,具體控制通過程序來完成。

圖5 S7-200與MM440接線圖
3.4 LED與LCD顯示模塊
本文選用的LCD為LCD12864,該顯示模塊內(nèi)置8 192個(gè)16×16點(diǎn)漢字,和128個(gè)16×8點(diǎn)ASCII字符集,顯示分辨率為128×64。可以顯示8×4行16×16點(diǎn)陣漢字,也可以完成圖形顯示,該模塊低電壓低功耗,不論硬件電路結(jié)構(gòu)或顯示程序都要簡潔得多,且該模塊的價(jià)格也比相同點(diǎn)陣的圖形液晶模塊要低。
LCD顯示模塊主要是用于實(shí)時(shí)顯示模具車的前后距離值,給人直觀的距離顯示,LED主要是紅黃藍(lán)三色燈,主要是根據(jù)距離的大小范圍,分別顯示綠黃紅,給人及時(shí)的距離信息的提示,并表示模具車的三種運(yùn)行狀態(tài)[12-14]。
4 軟件設(shè)計(jì)
系統(tǒng)控制的電路原理圖如圖6所示。
系統(tǒng)的單片機(jī)控制是采用C語言進(jìn)行編程,主要有主程序及各模塊子程序組成,PLC控制電機(jī)的程序是基于STEP7開發(fā)環(huán)境的梯形圖程序,系統(tǒng)的整體流程圖如圖7所示。
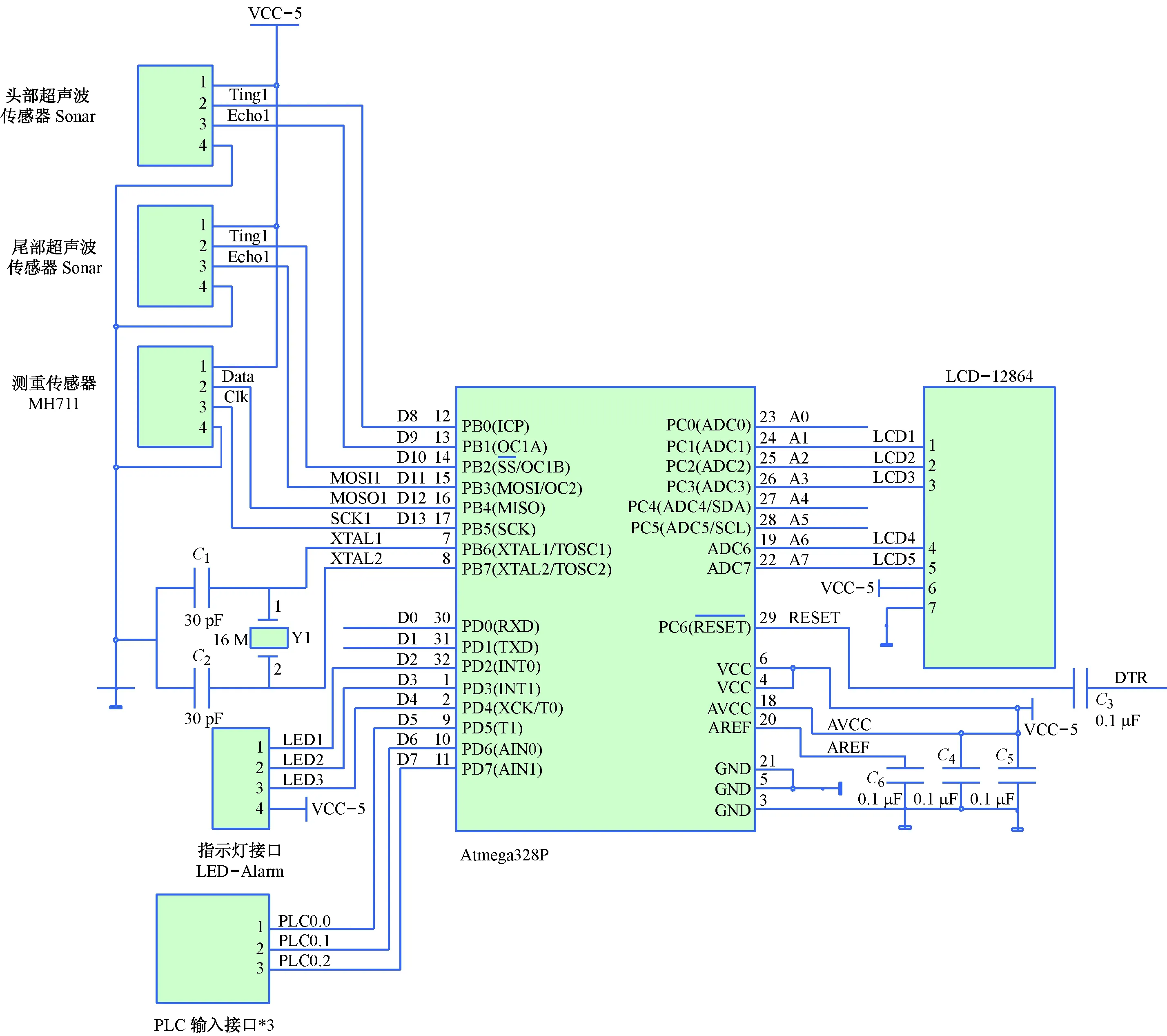
圖6 系統(tǒng)電路原理圖

圖7 系統(tǒng)基本流程圖
墻板自動化生產(chǎn)的過程中,生產(chǎn)線上的模具車的數(shù)量高達(dá)60輛,在軌道上行走的狀態(tài)也變化多樣,模具車在軌道行走的過程中,通過前后的超聲波測距模塊采集數(shù)據(jù)信息送至單片機(jī),單片機(jī)通過計(jì)算得出距離值,并實(shí)時(shí)顯示在LCD上,通過距離的顯示可以讓工人獲得前后車距。同時(shí)單片機(jī)對得出的距離值進(jìn)行判斷,如果距離大于100 cm,控制LED綠燈亮,表示屬于安全距離;如果距離到達(dá)100 cm,控制LED黃燈亮,表示模具車需減速慢行,同時(shí)單片機(jī)給PLC一個(gè)開關(guān)量輸入,通過變頻器控制電機(jī)完成兩個(gè)速段的減速;當(dāng)距離到達(dá)50 cm,控制LED紅燈亮,表示危險(xiǎn)距離,模具車需立即停止,此時(shí)單片機(jī)給PLC一個(gè)開關(guān)量輸入,控制電機(jī)立即停止[15],這樣就避免了模具車發(fā)生碰撞。
在墻板養(yǎng)護(hù)系統(tǒng)中,為了保證養(yǎng)護(hù)軌道上可以放置一定數(shù)量的模具車,因此要求模具車排隊(duì)的間距保持在50 cm左右。當(dāng)模具車到達(dá)養(yǎng)護(hù)系統(tǒng)時(shí),通過上述控制流程,通過模具車的提前減速和及時(shí)制動,可以實(shí)現(xiàn)模具車在養(yǎng)護(hù)排隊(duì)的過程中較為準(zhǔn)確的距離定位,保證養(yǎng)護(hù)環(huán)節(jié)的正常運(yùn)行。
5 結(jié) 語
為避免墻板的自動化生產(chǎn)線中模具車的碰撞問題,設(shè)計(jì)了一套自動化控制的模具車智能測距及防碰撞系統(tǒng),該系統(tǒng)基于單片機(jī)控制,通過超聲波測距模塊對距離進(jìn)行檢測,并將距離值實(shí)時(shí)顯示在LCD上,通過3個(gè)LED燈的亮滅來提示距離的范圍,讓工人及時(shí)獲得模具車的前后距離。同時(shí)通過模具車自身的PLC及變頻器,對電機(jī)的減速和制動進(jìn)行控制,解決了模具車的碰撞問題,并在墻板的養(yǎng)護(hù)系統(tǒng)中,實(shí)現(xiàn)了模具車較為準(zhǔn)確的距離定位,保證了模具車的有序排隊(duì)。經(jīng)測試,該系統(tǒng)性能良好,性價(jià)比高,在墻板的實(shí)際生產(chǎn)線中應(yīng)用穩(wěn)定,同時(shí),此系統(tǒng)也可推廣到其他應(yīng)用移動小車的生產(chǎn)線中。
[1] 張 甜,陳德海.一種車輛防碰撞預(yù)警及自動剎車系統(tǒng)[J].江西理工大學(xué)學(xué)報(bào),2006,27(6):57-60.
[2] 卜英勇,王紀(jì)蟬,趙海鳴.基于單片機(jī)的高精度超聲波測距系統(tǒng)[J].儀器儀表與傳感器,2007(3):66-69.
[3] Zhang Xin-bao, Lu Hong, Li Zhu.Distance-measuring technology using LD for auto anti-collision[J].Wuhan University Journal of Natural Sciences, 2004,9(1):.83-88.
[4] Zhi Chuan-guan, Yong Wang-liu, Yu Cai-shi.Problems and developing direction of anti-collision technology in the dense well pattern area[J].Procedia Engineering, 2010, 7: 304-311.
[5] 彭翠云,趙廣耀,戎海龍.汽車倒車系統(tǒng)中超聲波測距模塊的設(shè)計(jì)[J].壓電與聲光,2008,30(2):251-254.
[6] 楊 旭,劉小方,張澤奇.基于單片機(jī)的超聲波測距系統(tǒng)設(shè)計(jì)[J].機(jī)床與液壓,2011,39(8):106-109.
[7] 黃永紅,吉裕輝,楊 東.PLC控制電機(jī)變頻調(diào)速試驗(yàn)系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)[J].電機(jī)與控制應(yīng)用,2007,34(10):40-43.
[8] 陳黎敏.傳感器技術(shù)及其應(yīng)用[M].北京:機(jī)械工業(yè)出版社,2010:128-134.
[9] 蔡睿妍.Arduino的原理及應(yīng)用[J].電子設(shè)計(jì)工程,2012,20(16):155-158.
[10] 高洪斌,孔美靜,赫孟和.西門子PLC與工業(yè)控制網(wǎng)絡(luò)應(yīng)用[M].北京:電子工業(yè)出版社,2006.
[11] 向曉漢,陸 彬.西門子PLC S7-200/300/400/1200應(yīng)用案例精講[M].北京:化學(xué)工業(yè)出版社,2011.
[12] 苑 潔,常太華.基于STM32單片機(jī)的高精度超聲波測距系統(tǒng)的設(shè)計(jì)[J].電子設(shè)計(jì)工程,2011,19(15):76-79.
[13] 阮觀強(qiáng). 智能防碰撞報(bào)警制動系統(tǒng)的研究與開發(fā)[J].煤炭技術(shù),2012,31(4):221-224.
[14] 胡 瑜.汽車防碰撞系統(tǒng)的應(yīng)用與研究[J].機(jī)械工程與自動化,2010(4):214-217.
[15] 詹軍權(quán),伍海翔,莫榮滔.基于51單片機(jī)的汽車防碰撞系統(tǒng)的設(shè)計(jì)[J].電子世界,2013(15):31-33.
Development of Intelligent Measuring and Anti-collision System for Mold Automated Guided Vehicle in Wallboard Production Line
FENGSheng1,WANYi1,LIBing-ran1,ZHUZhen-jie1,ZHANGDong2
(1. Key Laboratory of High Efficiency and Clean Manufacturing, Shandong University,Jinan 250061, China; 2. Qilu Hospital, Shandong University, Jinan 250012, China)
An intelligent measuring and anti-collision system is developed based on MCU and PLC, to overcome collision problems during AGV (Automated Guided Vehicle) moving and lining up in production line of wallboard. Ultrasonic module is used to measure the distance between mould AGVs and signals are processed by MCU. Then real-time distance values are shown in LCD. Alarm signals are also displayed in LED according to different distances. Braking and precision positioning are controlled by PLC and frequency transformer. Experimental validation shows that this system is reliable and costs lower, it can solve the collision problems in wallboard production effectively.
mold AGV; MCU; ultrasonic distance measuring; LCD display; anti-collision
2014-07-07
國家自然基金資助項(xiàng)目(51175306);教育部新世紀(jì)優(yōu)秀人才資助項(xiàng)目(NCET-11-0310);山東大學(xué)基本科研業(yè)務(wù)費(fèi)專項(xiàng)資金資助(2014JC020)
馮 升(1990-),男,山東臨沂人,碩士生,主要從事機(jī)械制造自動化方面的研究。
Tel.:15098839835;E-mail:fengshengwin@163.com
萬 熠(1977-),男,山東濟(jì)南人,副教授,碩士生導(dǎo)師,
Tel.:0531-88392539;E-mail:wanyi@sdu.edu.cn
TP 271+.4
A
1006-7167(2015)05-0045-04
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
電子制作(2018年12期)2018-08-01 00:48:04
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
