基于擺線針輪減速作用的新型緩降設(shè)備研發(fā)
2015-04-16 07:41:42王文深林潘忠
機(jī)械制造 2015年6期
關(guān)鍵詞:有限元設(shè)計(jì)
□ 王文深 □ 林潘忠
1.浙江工貿(mào)職業(yè)技術(shù)學(xué)院 汽車與機(jī)械工程學(xué)院 浙江溫州 325003
2.溫州職業(yè)技術(shù)學(xué)院 機(jī)械工程系 浙江溫州 325035
近年來(lái),城市高樓火災(zāi)頻發(fā),破壞力強(qiáng)且不便救援,造成了重大的人員傷亡與財(cái)產(chǎn)損失[1]。利用繩索從樓上平臺(tái)或窗口脫身是一種較為簡(jiǎn)單易行的辦法,因此各種高樓逃生裝置應(yīng)運(yùn)而生[2-4]。20世紀(jì)80年代以來(lái),國(guó)內(nèi)外學(xué)者對(duì)高樓緩降器進(jìn)行了大量研究,大致可分為阻尼式和減速盤式緩降器,阻尼式緩降器下降速度會(huì)隨使用者體重增加而增大,而減速盤式緩降器結(jié)構(gòu)復(fù)雜,有的還需要電機(jī)驅(qū)動(dòng)或控制,操作繁瑣,不利于推廣。高樓緩降裝置除了安全可靠外,最好能具備以下特征。
(1)下降速度能自動(dòng)控制,使用時(shí)不需人工調(diào)整與干預(yù)就能適應(yīng)不同體重的人,同時(shí)在保證安全的情況下,逃生的速度越快越好。
(2)對(duì)使用者無(wú)需進(jìn)行專業(yè)訓(xùn)練,也無(wú)體力、技能方面的特殊要求,操作簡(jiǎn)便,無(wú)需他人幫助,一個(gè)人就能實(shí)現(xiàn)自救。
(3)結(jié)構(gòu)簡(jiǎn)單,最好不要有動(dòng)力裝置。
針對(duì)上述要求,筆者設(shè)計(jì)了一種新型的高樓緩降裝置,通過(guò)擺線針輪和液壓阻尼的減速作用,使人或重物在下降0.8~1 m的過(guò)程中,完成一次下降-減速的運(yùn)動(dòng)過(guò)程,如此從高處到地面的長(zhǎng)距離被分成了若干段短距離,實(shí)現(xiàn)分級(jí)緩降的目的。基于擺線針輪的減速作用,設(shè)計(jì)了裝置結(jié)構(gòu)運(yùn)動(dòng)曲線,在此基礎(chǔ)上建立了整機(jī)的數(shù)值模型,用ANSYS軟件對(duì)其關(guān)鍵部位的強(qiáng)度進(jìn)行校核,通過(guò)樣機(jī)試驗(yàn),驗(yàn)證了裝置的可行性與安全性。

▲圖1 緩降裝置結(jié)構(gòu)簡(jiǎn)圖
1 結(jié)構(gòu)與原理
裝置的結(jié)構(gòu)示意如圖1所示,由手動(dòng)收線機(jī)構(gòu)、繞線輪、減速機(jī)構(gòu)和阻尼機(jī)構(gòu)4個(gè)部分組成。
阻尼機(jī)構(gòu)為液壓小孔阻尼,液壓缸內(nèi)活塞上設(shè)有單向口和阻尼孔,油液從液壓缸下腔經(jīng)小孔流向上腔時(shí)受到阻尼作用,而由上腔經(jīng)單向口流到下腔時(shí)不受阻尼。減速機(jī)構(gòu)是由擺線針輪構(gòu)成的諧波傳動(dòng),其針輪的外輪廓為凸輪結(jié)構(gòu),當(dāng)重物帶動(dòng)繞線輪旋轉(zhuǎn)若干圈后,由于擺線針輪的減速作用使凸輪轉(zhuǎn)動(dòng)一圈。凸輪在回行程階段,活塞桿與輪廓分離,人或重物處于下落運(yùn)動(dòng)狀態(tài);凸輪在推行程階段,凸輪將液壓缸活塞下壓,使繞線輪的轉(zhuǎn)動(dòng)受到阻礙,人或重物的下降速度減慢,直到減速至零。手動(dòng)收線機(jī)構(gòu)由一對(duì)傳動(dòng)比為3∶1的齒輪組成,它可以將繩索快速收回。為了使整體機(jī)構(gòu)有更好的操作性,設(shè)置了兩個(gè)超越離合器的單向結(jié)構(gòu):一個(gè)安裝在手動(dòng)卷線機(jī)構(gòu)和繞線輪之間,它的作用是手動(dòng)向上卷線時(shí),卷線機(jī)構(gòu)能帶動(dòng)卷線輪,而向下放線時(shí),不會(huì)因放線而帶動(dòng)手柄旋轉(zhuǎn),以防手柄旋轉(zhuǎn)而傷人;另一個(gè)安裝在繞線輪與擺線針輪之間,當(dāng)向下放線時(shí),繞線輪可以帶動(dòng)減速機(jī)構(gòu),而向上卷線時(shí),不用帶動(dòng)減速機(jī)構(gòu)以減小卷線阻力。
2 擺線針輪設(shè)計(jì)與分析
擺線針輪具有傳動(dòng)比大、效率高、結(jié)構(gòu)緊湊等優(yōu)點(diǎn),近年來(lái)在機(jī)器人、數(shù)控機(jī)床和自動(dòng)化設(shè)備等領(lǐng)域得到了廣泛應(yīng)用[5-6]。筆者設(shè)計(jì)的擺線針輪減速機(jī)可分為3個(gè)部分:輸入軸、減速部分、輸出部分,其運(yùn)動(dòng)簡(jiǎn)圖如圖2所示。當(dāng)輸入軸帶動(dòng)偏心套旋轉(zhuǎn)一周時(shí),由于擺線針輪上齒廓曲線的特點(diǎn)及其受針輪上針齒限制之故,擺線針輪的運(yùn)動(dòng)成為既有公轉(zhuǎn)又有自轉(zhuǎn)的平面運(yùn)動(dòng),針輪于相反方向轉(zhuǎn)過(guò)一個(gè)齒而得到減速,由此獲得較低的輸出轉(zhuǎn)速。
2.1 傳動(dòng)比及齒形設(shè)計(jì)
按照每1 m左右減速一次的目標(biāo),繞線輪最內(nèi)圈的直徑為63 mm,周長(zhǎng)約為197 mm;最外圈直徑為102 mm,周長(zhǎng)為316 mm,在確定減速比時(shí),取其平均周長(zhǎng)為263 mm。因此傳動(dòng)比i=1 000/263=3.93,取傳動(dòng)比為4。
使用SolidWorks三維軟件對(duì)擺線針輪建模,考慮到擺線針輪齒廓曲線的復(fù)雜性,不適合采用一般的建模方法,筆者通過(guò)定義公式曲線來(lái)生成擺線針輪的齒廓曲線。在CAXA電子圖板軟件中選擇“公式曲線”方式繪制齒廓曲線,根據(jù)設(shè)計(jì)要求對(duì)傳統(tǒng)的齒廓曲線數(shù)學(xué)方程進(jìn)行適當(dāng)修改與改進(jìn),得出一種優(yōu)化算法,以滿足本次設(shè)計(jì)的需要。根據(jù)擺線運(yùn)動(dòng)規(guī)律,建立擺線方程,在直角坐標(biāo)系下輸入擺線針輪齒廓的曲線方程。
針輪:


▲圖2 擺線針輪運(yùn)動(dòng)簡(jiǎn)圖
擺線輪:

式中:R為擺線輪基圓直徑;r為針輪的基圓半徑;Za和Zb分別為針輪和擺線輪的齒數(shù)。
取針輪齒數(shù)Za=12,針輪基圓半徑r=1.5 cm,傳動(dòng)比為4,則擺線輪的齒數(shù)Zb=9,則基圓直徑R=2rZb,代入擺線方程,在CAXA中作出單個(gè)齒的擺線圖線,通過(guò)陣列得到全部的齒形。輸出部分為凸輪結(jié)構(gòu),為使結(jié)構(gòu)緊湊,將針輪的外輪廓設(shè)計(jì)為凸輪,擺線針輪齒形和凸輪輪廓如圖3所示。

▲圖3 擺線針輪齒形及凸輪輪廓
2.2 擺線針輪強(qiáng)度計(jì)算
擺線針輪齒面的失效形式是疲勞點(diǎn)蝕和膠合,針輪與擺線輪輪齒的接觸,可認(rèn)為是兩個(gè)瞬時(shí)圓柱體的接觸[7],根據(jù)赫茲的接觸應(yīng)力公式,其接觸應(yīng)力δj為:

式中:Pi為任一瞬間針輪與擺線輪接觸點(diǎn)的法向壓力;Ed為接觸體的當(dāng)量彈性模量,擺線輪和針齒的材料均為合金鋼,故Ed=200 GPa;B為擺線輪的寬度;ρd為針輪與擺線輪接觸點(diǎn)的當(dāng)量曲率半徑。
輪齒在受載時(shí),齒根所受的彎矩最大,因此齒根處的彎曲疲勞強(qiáng)度最弱。引用標(biāo)準(zhǔn)直齒圓柱齒輪的齒根彎曲疲勞強(qiáng)度校核公式,在實(shí)際計(jì)算中,還應(yīng)計(jì)入齒根危險(xiǎn)截面處的過(guò)渡圓角引起的應(yīng)力集中作用以及彎曲應(yīng)力以外的其它應(yīng)力對(duì)齒根應(yīng)力的影響,因而得齒根危險(xiǎn)截面的彎曲強(qiáng)度條件為[8]:

式中:[δf]為許用彎曲疲勞應(yīng)力;m為齒輪模數(shù),擺線針輪模數(shù)較直齒齒輪要大很多,需根據(jù)實(shí)際設(shè)計(jì)來(lái)取[9];K 為載荷系數(shù), 一般取為 1.98;Ft為輪齒所受切向力;YFa為齒形系數(shù),一般取YFa=2.44;YSa為載荷作用于齒頂時(shí)的應(yīng)力校正系數(shù),一般取YSa=1.65。
3 有限元模型的建立與分析
3.1 數(shù)值模型與網(wǎng)格劃分
本文利用SolidWorks對(duì)緩降器進(jìn)行幾何建模,然后導(dǎo)入HyperMesh中劃分網(wǎng)格,建立有限元模型,采用ANSYS進(jìn)行分析計(jì)算,模型中一些細(xì)小的特征對(duì)結(jié)構(gòu)的應(yīng)力影響較小,如過(guò)渡圓角、邊緣倒角等,在保證分析可靠性的前提下,可以忽略這些微小特征。
網(wǎng)格導(dǎo)入HyperMesh軟件中劃分,HyperMesh是一款高效的有限元前處理軟件,它可以快速高效創(chuàng)建有限元網(wǎng)格,極大地提高了有限元前處理效率。本文選用四面體Solid187網(wǎng)格單元進(jìn)行劃分,為了較好地反映應(yīng)力變化規(guī)律,對(duì)擺線針輪和活塞桿處采用比較密集的網(wǎng)格,網(wǎng)格總數(shù)為863 242個(gè),整機(jī)有限元模型如圖4所示。其中,底板、側(cè)板、繞線輪和擺線針輪的材料參數(shù)為:彈性模量E=206 GPa, 泊松比 μ=0.3, 密度 ρ=7.8×103kg/m3; 液壓缸的材料參數(shù)為:彈性模量E=69 GPa,泊松比 μ=0.33,密度 ρ=2.9×103kg/m3。
3.2 結(jié)果分析
將由HyperMesh中得到的緩降器有限元模型導(dǎo)入到ANSYS分析軟件中,定義分析類型為結(jié)構(gòu)動(dòng)力學(xué)分析,添加底板固定約束,計(jì)算整機(jī)在最大負(fù)載為200 kg作用下擺線針輪和其它結(jié)構(gòu)處的受力情況。
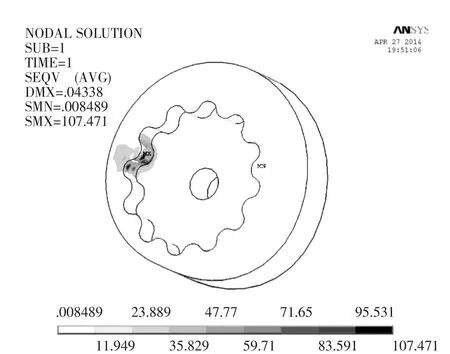
圖5和圖6顯示了擺線針輪在負(fù)載作用下的等效應(yīng)力云圖,從圖中可以看出,齒面接觸應(yīng)力最大值出現(xiàn)在兩齒廓的接觸點(diǎn)處,且擺線輪處的最大應(yīng)力比針輪要大,兩者都小于材料的最大許用應(yīng)力,所以該齒輪在齒根彎曲強(qiáng)度的范圍之內(nèi),滿足強(qiáng)度要求。
圖7顯示了右支撐板上的應(yīng)力分布云圖,右支撐板上的最大等效應(yīng)力發(fā)生在底腳處,這主要是由于重物下降時(shí)對(duì)支撐板產(chǎn)生的彎矩作用,使得支撐板與底板接觸處的應(yīng)力最大。

▲圖5 針輪等效應(yīng)力云圖

▲圖4 有限元模型
▲圖6 擺線輪等效應(yīng)力云圖

▲圖7 右支撐板等效應(yīng)力云圖

▲圖8 緩降器實(shí)物圖
通過(guò)對(duì)緩降器關(guān)鍵部位及整機(jī)的應(yīng)力情況進(jìn)行有限元分析,指出最大應(yīng)力所在位置,并在后續(xù)設(shè)計(jì)中加強(qiáng)改進(jìn)結(jié)構(gòu)設(shè)計(jì),增加裝置的可靠性與安全性。
4 實(shí)驗(yàn)
為了驗(yàn)證裝置的可靠性,對(duì)所制作的實(shí)物樣機(jī)進(jìn)行現(xiàn)場(chǎng)實(shí)驗(yàn)。緩降器實(shí)物如圖8所示,分別對(duì)15 kg重物、40 kg重物和64 kg的真人進(jìn)行測(cè)試,緩降器安裝在三樓即6.5 m高度處,測(cè)試不同負(fù)載時(shí)的下降時(shí)間及平均速度,結(jié)果見表1。

表1 不同負(fù)載時(shí)緩降器運(yùn)動(dòng)規(guī)律
分析表1可知,本緩降器可適應(yīng)不同重物的下降,且每段下降高度與重量無(wú)關(guān),在各段降落過(guò)程中實(shí)現(xiàn)加速-減速至零的功能。隨著重量的增加,其下降平均速度也逐漸增加,這主要是由于負(fù)載加大時(shí),凸輪對(duì)活塞桿的作用力增大,活塞運(yùn)動(dòng)速度增加。因此隨著負(fù)載增大,下降時(shí)間越短,但差別不大。
5 結(jié)束語(yǔ)
(1)通過(guò)合理設(shè)計(jì),利用機(jī)械結(jié)構(gòu)實(shí)現(xiàn)了像消防戰(zhàn)士一樣的分級(jí)下降的運(yùn)動(dòng)方式,下降速度快,其效果與受過(guò)專業(yè)訓(xùn)練的人員相似。
(2)利用擺線針輪的諧波傳動(dòng)進(jìn)行減速,結(jié)構(gòu)緊湊,輪齒的彎曲疲勞強(qiáng)度高,嚙合重合度高,大大提高了承載能力,增加了使用時(shí)的安全性。
(3)在結(jié)構(gòu)上,采用液壓毛細(xì)小孔進(jìn)行阻尼,使這一裝置無(wú)需人工干預(yù),不需調(diào)整,并實(shí)現(xiàn)對(duì)不同重量的自動(dòng)適應(yīng)。
本文所述高樓緩降器利用了液壓油流動(dòng)的阻尼作用,產(chǎn)生反作用力來(lái)控制人體下降的速度,能夠?qū)崿F(xiàn)分級(jí)緩降的目的,屬于公共場(chǎng)所固定安裝式逃生設(shè)備,獲得國(guó)家相關(guān)專利。該裝置結(jié)構(gòu)緊湊,安全可靠,為緩降器的設(shè)計(jì)與發(fā)展提供了一種新的思路和參考價(jià)值。
[1] 陳遠(yuǎn)超,沈孟鋒,費(fèi)凱,等.自適應(yīng)電磁阻尼式高樓逃生緩降器設(shè)計(jì)[J].機(jī)械制造,2012,50(6):6-8.
[2] 蘭自勉,鐘清.一種逃生液壓緩降器的設(shè)計(jì)[J].液壓與氣動(dòng),2011(12):7-8.
[3] 王興東,鐘升,王強(qiáng),等.往復(fù)式液壓緩降裝置的動(dòng)態(tài)特性仿真研究[J].機(jī)床與液壓,2013,41(1):142-145.
[4] Zhang Z,Liu X.Design of an Intermittent Escape Apparatus Used in High-rise Buildings Based on Escapement Mechanism [C].2011 IEEE International Conference on Mechatronic Science,Electric Engineering and Computer(MEC2011),Jilin,China,2011.
[5] Gorla C,Davoli P,Rosa F,et al.Theoretical and Experimental Analysis of a Cycloidal Speed Reducer [J].Journal of Mechanical Design,2008,130(11):35-39.
[6] Hwang Y W, Hsieh C F.Geometric Design Using Hypotrochoid and Nonundercutting Conditions for an Internal Cycloidal Gear[J].Journal of Mechanical Design,2007,129(4):413-420.
[7] 孫宇,朱俊平,西慶坤.農(nóng)業(yè)機(jī)械中的擺線輪齒廓強(qiáng)度有限元分析[J].農(nóng)機(jī)化研究,2008(4):25-28.
[8] 張占東,姚偉德.基于ANSYS的直齒圓柱齒輪精確建模與應(yīng)力分析[J].機(jī)械工程與自動(dòng)化,2012(6):71-73.
[9] 李充寧,孫濤.2K—V型行星傳動(dòng)中擺線針輪嚙合的傳動(dòng)精度研究[J].機(jī)械工程學(xué)報(bào),2001,37(4):61-65.
猜你喜歡
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
上海節(jié)能(2020年3期)2020-04-13 13:16:16
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:00
天津醫(yī)科大學(xué)學(xué)報(bào)(2019年6期)2019-08-13 07:04:32
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
機(jī)械工程師(2015年10期)2015-02-02 01:14:03
機(jī)電產(chǎn)品開發(fā)與創(chuàng)新(2014年4期)2014-03-11 16:42:24
