基于接箍識別的管柱測速方法研究
2015-11-24 03:31:42劉樹林劉春光
機械制造 2015年6期
□ 袁 率 □ 劉樹林 □ 劉春光
上海大學 機電工程與自動化學院 上海 200072
基于接箍識別的管柱測速方法研究
□ 袁 率 □ 劉樹林 □ 劉春光
上海大學 機電工程與自動化學院 上海 200072
石油鉆井作業中,下放井下配套設備時,需要獲取準確的井深信息。提出一種基于管柱接箍識別和幀間差分法的管柱升降速度測量方法,首先對管柱運動視頻圖像進行預處理,再根據接箍部分直徑大于管徑的特征檢測接箍,最后利用幀間差分法測量管柱起升速度。實驗表明,該方法可以較準確地識別出接箍并測量出管柱運動速度。
接箍識別 結構特征 幀間差分 管柱 測速
在石油工業中,測井作業是十分重要的,在鉆井、完井施工作業時需要測量管柱下放或起升的長度,為下放封隔器、使用井徑儀測量井徑等作業提供必要的井深與位置信息。傳統的油管長度測量方法是在地面由人工拉鋼卷尺丈量[1],人工計量偶然誤差和原理誤差都很大,工作效率低,有的油田還要再次下放專用儀器測量井下工具的精確位置[2]。
常規的自動化管柱測長方法有接觸式檢測、磁感應檢測、超聲波檢測以及激光檢測等[3]。本文提出基于數字圖像處理技術的起升管柱在線測速方法,利用起升管柱的視頻圖像進行采集、平滑與銳化、圖像邊界分割等預處理,再針對起升管柱運動目標的檢測以及對接箍結構的識別檢測,用攝像機進行標定,確定實際尺寸與圖像像素尺寸之間的比例,最終實時測量出起升管柱的速度,管柱起升長度可以由它與起升方向的速度和時間的關系獲得。
1 圖像預處理
測井作業的施工現場環境復雜而惡劣,有很多噪聲干擾,影響采集圖像的質量,如果直接對這種圖像進行運動目標的識別并測量速度,一方面不容易實現,另外即使可以實現,測量精度也會降低,達不到工程要求,因此必須先對圖像進行降噪、增強等處理[4]。
1.1 中值濾波
中值濾波是一種可以有效抑制噪聲的非線性平滑處理方法,其基本原理是把數字圖像中某一像素點的灰度值,用這個點的某個鄰域中各個像素點灰度值的中值來代替,選擇一個特定長度或形狀的鄰域作為窗口,隨著窗口的滑動,將窗口中各像素點灰度值按大小排序,選取中間值作為此窗口正中間像素點的灰度值。
1.2 銳化濾波
圖像銳化是為了突出圖像邊緣信息,加強前景目標的輪廓特征,以便于機器識別。圖像中前景目標的邊緣是像素灰度值變化比較大的地方,從數學角度講,檢測圖像灰度變化就是微分的概念,因此可利用拉普拉斯算子對管柱圖像進行線性微分運算。對于圖像中的點 f(i,j),拉普拉斯算子表達式為:

1.3 圖像分割
圖像分割的目的是把目標從背景中分離提取出來,以便進一步對圖像進行處理和對目標進行測量。采用灰度閾值法進行管柱與背景之間的分割,即合理選
擇一個閾值,將圖像轉換為黑白的二值圖像。設定黑色為背景,灰度值為0;白色為前景目標,灰度值為1。
圖像二值化變換函數為:

式中:f(i,j)為圖像中的點;T為圖像分割閾值。
圖1為運動管柱的原始圖像及其灰度直方圖,由圖1可以觀察到,起升管柱圖像直方圖雙峰特性明顯且谷底較長,可采用直方圖法確定閾值大小,即通過觀察與試驗選取閾值。經試驗選擇T=30,圖2是二值化后的管柱圖像,分割效果理想。

▲圖1 原始圖像與灰度直方圖

▲圖2 二值化圖像
2 接箍識別與管柱測速算法
管柱測速系統框圖如圖3所示,CCD攝像頭相對地面固定不動,其主光軸垂直于被測管柱所在平面,二者成正投影關系。如圖4(a)所示為某時刻運動管柱前景,圖4(b)所示為此時刻的背景圖,由圖可知,當測量過程中運動管柱貫穿整個攝像頭視場后,由于管柱形狀的規則性與結構的對稱性,如果不存在特征點,將無法檢測出管柱的運動。針對這種情況,提出以接箍作為特征區域的運動檢測方法。接箍是兩根短管柱連接的部分,特點是直徑略大于管徑,接箍的運動相對管柱更容易檢測。

▲圖3 管柱測速系統框圖

▲圖4 運動管柱某時刻前景與背景
2.1 基于結構特征的接箍識別算法
如前所述,接箍的結構特征是直徑略粗于其它部分的管徑,這在數字圖像中的體現是接箍兩條邊緣之間所占有的像素數目比其它部分兩條邊緣之間占有的像素數目更多,所以此算法的關鍵就在于接箍特征點的捕捉。首先需要確定特征點的行坐標,對每幀圖像進行二值化之后,采取逐行掃描的辦法檢測每一行像素值為255的像素數目。通過圖像處理的方法可以分別計算出管柱和接箍兩條邊緣之間所占像素的個數值,之后再取一個介于這兩個數值中間的數值作為接箍判定的閾值。若大于此閾值,則判定為接箍區域,記為1;否則為管柱區域,記為0。
一幅m×n(長×寬)的管柱接箍圖像,經二值化處理后,圖像某一行中的白色像素點的個數為:

接箍區域行坐標:

式中:Tp為接箍行坐標判定閾值。
當B(i)=1時,所對應的行坐標i屬于接箍區域。
接箍區域的行坐標確定之后,要進一步確定接箍區域的列坐標。根據前述圖像二值化的結果,當某一像素點為白色,而這一行上前一點為黑色,則認為此點為接箍區域的起始點;當某一像素點為白色,而這一行上后一點為黑色,則認為此點為接箍區域的末端點。接箍區域列坐標表達式為:

式中:g(i,j1)是管柱及接箍的左邊緣點;g(i,j2)是管柱及接箍的右邊緣點。
則接箍區域圖像坐標表達式為:

通過邏輯運算可將管柱與接箍區分開來,得到接箍部分的圖像坐標,并用方框標注出來,如圖5所示。
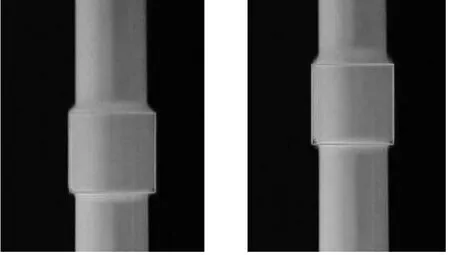
▲圖5 接箍識別與捕捉效果
2.2 攝像機標定
圖像坐標系中的單位是像素(pixel),而需要測量出的結果單位是實際尺寸單位,如m、mm等,本文根據實驗器材情況確定單位為mm,所以必須通過攝像機標定來確定實際尺寸與像素尺寸之間的關系[5]。標定過程為:固定攝像機位置,在與管柱到攝像機距離相同的距離上放置一標準尺寸的矩形塊,并測量出某一邊的像素數目。此邊實際長度和該邊在圖像中的像素數的比值,就是單位像素的尺寸值。為了使標定結果更加準確,可以進行多次標定,取其平均值。
2.3 幀間差分法測速
識別出接箍區域后,需要將接箍突起的結構作為運動目標從背景圖像中分離出來[6],進而測量管柱運動速度。因為攝像機的位置固定不變,只有管柱相對攝像機運動,所以選擇幀間差分法,利用運動目標在圖像序列中相鄰幀之間像素的差異提取運動目標。
首先對預處理之后的視頻圖像hk(i,j),計算第k幀與第k-1幀之間的差值,得到差分圖像Rk(i,j):

由于其經過二值化處理,因此接箍部分的運動被檢測出來并作為前景顯示在圖像中。
在 hk-1(i,j)中確定一點 hk-1(ik-1,jk-1)(方便起見可以選擇一角點)為基點,根據其在運動接箍上相對位置不變的特點,可以很容易確定其在下一幀hk(i,j)中的坐標hk(ik,jk)。通過圖像處理的手段獲取兩點在垂直方向移動的像素數,則管柱起升速度vl為:

本文中,p=0.171 4 mm/pixel,q=30 fps。
3 實驗結果
實驗基于MATLAB軟件進行算法的驗證,實現了在管柱起升視頻圖像序列中進行運動接箍捕捉跟蹤以及管柱起升速度的測量。拍攝一段管柱上升的視頻,同時用速度傳感器記錄每 0.5 s的速度值,再基于MATLAB對視頻進行處理,測量每15幀(即每0.5 s)的速度值,取部分實驗數據,比較結果見表1。
產生誤差的主要原因可能是:①有限實驗條件下攝像機的分辨率不高、鏡頭引起的透視誤差以及畸變;②攝像機標定的誤差;③ 速度傳感器的測量誤差;④外部環境的影響,包括照明對原始圖像質量的影響,以及抖動引起的誤差等。

表1 實驗結果
4 結論
本文基于模式識別及圖像處理技術,提出一種基于油管接箍結構特征的接箍識別及管柱起升速度測量方法,并基于MATLAB軟件對算法進行了驗證。實驗證明,此方法實時性好,可以有效識別出管柱接箍,所測量的速度值誤差在容許范圍之內,并且仍有提高精度的空間,成本低廉,可以在實際測量中推廣應用。
[1] 吳文秀,劉立,劉文興,等.油管長度智能計量儀的研制與試驗[J].石油機械,2000,28(5):34-35.
[2] 盧明昌,于亦明,鞠武,等.油管智能激光測長系統[J].石油機械,2001,29(8):34-36.
[3] 宋潔,葉獻方,劉勝紅.油管在線動態測長系統設計[J].計算機測量與控制,2007,15(3):308-309.
[4] 欒一秀,郭帥,袁洪波,等.油管接箍運動圖像的檢測與識別[J].電子測量技術,2011,34(8):41-44.
[5] 李文錦,吳海彬,何祖恩.基于機器視覺的機械測量及識別技術研究[J].機床與液壓,2010,38(1):18-21.
[6] Sagrebin Maria,PauliJosef.Realtime Moving Object Detection for Video Surveillance[C].6th IEEE International Conference on Advanced Video and Signal Based Surveillance,Genova,Italy,2009.
(編輯 丁 罡)
TH122
A
1000-4998(2015)06-0085-03
2014年12月
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
海峽科技與產業(2016年3期)2016-05-17 04:32:12
