水下運(yùn)載體航位推算系統(tǒng)初始位置確定方法
2015-04-13 02:46:24張延順郭雅靜黃小娟李春雨汪湛清
北京航空航天大學(xué)學(xué)報(bào) 2015年12期
張延順 ,郭雅靜,黃小娟,李春雨,汪湛清
(1.北京航空航天大學(xué) 儀器科學(xué)與光電工程學(xué)院,北京100191; 2.北京理工大學(xué) 自動(dòng)化學(xué)院,北京100081)
航位推算(Dead Reckoning,DR)/水聲定位系統(tǒng)組合定位既能抑制DR 系統(tǒng)隨著時(shí)間增加由誤差累積引起的誤差發(fā)散,又能平滑水聲定位系統(tǒng)輸出位置的波動(dòng)[1-2].在水聲定位系統(tǒng)短時(shí)間失效的情況下,可以依靠DR 進(jìn)行導(dǎo)航定位[3-5].此方法在水下導(dǎo)航系統(tǒng)中得到廣泛應(yīng)用.DR 系統(tǒng)的初始位置精度影響DR 系統(tǒng)性能[6-7],也影響DR/水聲組合定位系統(tǒng)導(dǎo)航數(shù)據(jù)的性能.在對(duì)姿態(tài)和速度平穩(wěn)性有較高要求的水下精確測(cè)繪等[8-9]領(lǐng)域,對(duì)DR 系統(tǒng)的初始位置精度要求更高.
水下導(dǎo)航信息貧乏[10-13],通常只能用水聲定位系統(tǒng)輸出的位置信息作為DR 系統(tǒng)的初始位置.水聲定位系統(tǒng)是根據(jù)聲波在水底應(yīng)答器和載體接收機(jī)間傳播的時(shí)間來(lái)確定距離進(jìn)而進(jìn)行定位的,受聲速誤差、航行噪聲和載體搖擺等影響,整體數(shù)據(jù)的優(yōu)劣程度不一,表現(xiàn)為數(shù)據(jù)波動(dòng)較大[14-15].所以,需要從一段時(shí)間內(nèi)水聲定位系統(tǒng)輸出的位置信息中計(jì)算提取出DR 系統(tǒng)需要的初始位置.
當(dāng)水下運(yùn)載體為靜基座狀態(tài)時(shí),通常采用對(duì)一段時(shí)間內(nèi)水聲定位系統(tǒng)輸出信號(hào)求平均值的方法來(lái)得到DR 系統(tǒng)的初始位置,此方法在水下載體處于系泊狀態(tài)時(shí)精度較高.在海洋探索和科學(xué)考察時(shí),水下運(yùn)載體通常為運(yùn)動(dòng)狀態(tài),在運(yùn)動(dòng)狀態(tài)下,應(yīng)用求平均值法則會(huì)引入較大的計(jì)算誤差.因此,急需解決水下運(yùn)載體行進(jìn)過(guò)程中確定DR 系統(tǒng)初始位置的問(wèn)題.基于此背景,本文提出了運(yùn)動(dòng)過(guò)程中水下運(yùn)載體DR 系統(tǒng)初始位置確定的方法.該方法綜合DR 和水聲定位系統(tǒng)的特點(diǎn),能得到優(yōu)化的初始位置,可提高DR/水聲組合定位系統(tǒng)姿態(tài)和速度的穩(wěn)定性,有助于水下地形測(cè)繪、勘探等系統(tǒng)提高成圖質(zhì)量.
1 DR 系統(tǒng)初始位置確定方法
水聲定位系統(tǒng)利用聲波在水下傳播良好的特性,通過(guò)檢測(cè)其傳輸?shù)臅r(shí)間差進(jìn)行定位,但是其輸出信號(hào)隨機(jī)誤差較大,特別是遠(yuǎn)距離傳輸時(shí)誤差更大.目前常用的水聲定位系統(tǒng)主要有長(zhǎng)基線(xiàn)系統(tǒng)(LBL)、短基線(xiàn)系統(tǒng)(SBL)、超短基線(xiàn)系統(tǒng)(USBL),本文應(yīng)用海試實(shí)驗(yàn)中的USBL 數(shù)據(jù)進(jìn)行研究.某次海試實(shí)驗(yàn)初始定位時(shí)間(75 s)內(nèi)的超短基線(xiàn)定位系統(tǒng)USBL 的輸出數(shù)據(jù)如圖1 所示.
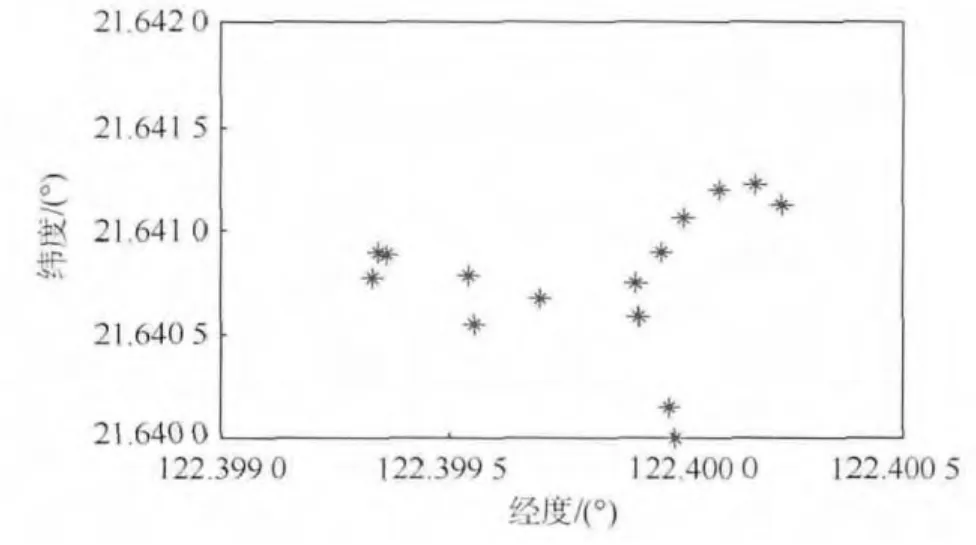
圖1 初始定位時(shí)間內(nèi)水聲定位系統(tǒng)輸出位置數(shù)據(jù)Fig.1 Output location data of hydroacoustic system in initial positioning time
由圖1 可見(jiàn),USBL 水聲系統(tǒng)輸出數(shù)據(jù)隨機(jī)性較大,該段時(shí)間段內(nèi)平均位置為(122.400°,21.640 77°),最大定位誤差為88.50 m,最小定位誤差為11.98 m.因此以任一點(diǎn)數(shù)據(jù)作為DR 系統(tǒng)初始值都可能會(huì)有較大的誤差,但通常只能從一段時(shí)間內(nèi)的水聲定位系統(tǒng)數(shù)據(jù)中提取DR 系統(tǒng)初始值,這就需要針對(duì)運(yùn)載體運(yùn)動(dòng)特點(diǎn)采用相應(yīng)方法確定初始位置.水下運(yùn)載體高度信息由深度計(jì)提供,所以實(shí)際應(yīng)用時(shí)本文只考慮二維平面內(nèi)的初始位置信息,即經(jīng)度、緯度信息.
1.1 準(zhǔn)靜態(tài)情況的平均值法定位
準(zhǔn)靜態(tài)情況下水下載體姿態(tài)有輕微變化,但無(wú)線(xiàn)運(yùn)動(dòng).此情況下,對(duì)短時(shí)間內(nèi)水聲定位系統(tǒng)提供的經(jīng)度、緯度進(jìn)行求平均值運(yùn)算,在一定程度上能減小定位系統(tǒng)的誤差.通常采用的方法是在短時(shí)間內(nèi)采集1 組水聲定位系統(tǒng)輸出值,然后對(duì)此數(shù)據(jù)進(jìn)行求平均運(yùn)算,以平均值作為位置的初始值,初始緯度、經(jīng)度分別為
式中:Lk和λk分別為水聲定位系統(tǒng)k 時(shí)刻輸出的緯度和經(jīng)度數(shù)值.
在靜態(tài)情況下平均值法能有效抑制水聲定位系統(tǒng)的隨機(jī)誤差,但是在運(yùn)動(dòng)情況下,則會(huì)產(chǎn)生與運(yùn)動(dòng)狀態(tài)相關(guān)的位置誤差,且位置誤差隨著運(yùn)動(dòng)速度增大而增大,需要研究動(dòng)態(tài)情況下初始位置確定方法.
1.2 最小二乘擬合方法
動(dòng)態(tài)情況是指水下載體具有線(xiàn)運(yùn)動(dòng).動(dòng)態(tài)情況下采用平均值法計(jì)算位置初始會(huì)產(chǎn)生明顯的誤差.水下載體以某一速度直線(xiàn)運(yùn)動(dòng)時(shí),可采用最小二乘直線(xiàn)擬合方法對(duì)水聲定位系統(tǒng)提供的經(jīng)度和緯度信息分別進(jìn)行擬合,并計(jì)算出位置初值.
最小二乘法(又稱(chēng)最小平方法)是一種數(shù)學(xué)優(yōu)化技術(shù),它通過(guò)最小化誤差的平方和尋找數(shù)據(jù)的最佳函數(shù)匹配.利用最小二乘法可以簡(jiǎn)便地求得1 組未知位置數(shù)據(jù),并使得這些求得的位置數(shù)據(jù)與實(shí)際水聲定位系統(tǒng)輸出的位置數(shù)據(jù)之間誤差的平方和為最小.
水聲定位系統(tǒng)輸出1 組緯度、經(jīng)度數(shù)據(jù)分別為

分別對(duì)緯度L、經(jīng)度λ 進(jìn)行最小二乘擬合,假設(shè)最小二乘擬合直線(xiàn)函數(shù)為
分別計(jì)算擬合系數(shù)a1、a2、b1和b2使得計(jì)算得出的緯度、經(jīng)度與實(shí)測(cè)的緯度、經(jīng)度離差的平方和最小:

將計(jì)算得到的a1、a2、b1和b2代入式(3),即可得到擬合直線(xiàn).如果后續(xù)工作為實(shí)時(shí)定位解算,應(yīng)以擬合直線(xiàn)的末尾點(diǎn)為該時(shí)間點(diǎn)以后DR 的起始點(diǎn).本文所研究的實(shí)驗(yàn)數(shù)據(jù)為離線(xiàn)后處理,為了對(duì)全部數(shù)據(jù)進(jìn)行定位解算研究,以擬合直線(xiàn)的初始點(diǎn)為全部數(shù)據(jù)DR 系統(tǒng)的初始位置.
采用最小二乘法確定初始位置后,能在一定程度上提高載體運(yùn)動(dòng)狀態(tài)情況下初始位置的計(jì)算精度.但最小二乘法擬合出的零階和一階系數(shù)是在對(duì)1 組數(shù)據(jù)整體誤差最小情況下計(jì)算出來(lái)的.當(dāng)水聲定位數(shù)據(jù)輸出誤差正態(tài)性不好時(shí),如前段數(shù)據(jù)誤差正偏大,而后段數(shù)據(jù)負(fù)偏大情況下最小二乘法擬合出曲線(xiàn)的一階系數(shù)會(huì)偏小,這會(huì)導(dǎo)致初始位置計(jì)算偏大,且該方法計(jì)算得出的運(yùn)動(dòng)軌跡具有隨機(jī)性,不同區(qū)段內(nèi)計(jì)算得出的運(yùn)動(dòng)軌跡偏差較大.因此,在實(shí)用中此方法還需要改進(jìn).
1.3 軌跡平移法
水聲位置數(shù)據(jù)分布影響擬合的運(yùn)動(dòng)軌跡,其誤差分布的非正態(tài)性將導(dǎo)致最小二乘擬合直線(xiàn)的斜率偏離真實(shí)值,從而引起初始位置計(jì)算誤差.為解決此問(wèn)題,本文依據(jù)DR 系統(tǒng)短期精度高、數(shù)據(jù)平滑的特點(diǎn),提出利用軌跡平移法計(jì)算初始位置的方案.軌跡平移法原理如圖2 所示.

圖2 軌跡平移法原理Fig.2 Principle of trajectory translation method
首先以水聲定位系統(tǒng)USBL 數(shù)據(jù)初始點(diǎn)坐標(biāo)為初始位置,利用羅經(jīng)提供的姿態(tài)信息和多普勒速度計(jì)程儀(Doppler Velocity Log,DVL)提供的速度信息,進(jìn)行DR 得到水下運(yùn)載體在初始定位階段的運(yùn)行軌跡.羅經(jīng)輸出的姿態(tài)信息在短時(shí)間內(nèi)精度較高,所以用DR 得到的位置數(shù)據(jù)能真實(shí)反映水下載體的運(yùn)動(dòng)趨勢(shì)和運(yùn)動(dòng)軌跡的形狀,此運(yùn)動(dòng)趨勢(shì)與真實(shí)運(yùn)動(dòng)軌跡相比誤差較小.但由于水聲定位系統(tǒng)提供的初始位置具有隨機(jī)性,所以應(yīng)用DR 系統(tǒng)計(jì)算的軌跡相對(duì)真實(shí)軌跡在位置上是有偏移的,但將DR 計(jì)算得到的軌跡進(jìn)行平移則會(huì)得到與真實(shí)軌跡比較接近的運(yùn)行軌跡.為得到軌跡的準(zhǔn)確初始位置,本文在水聲定位系統(tǒng)數(shù)據(jù)和DR 系統(tǒng)數(shù)據(jù)擬合直線(xiàn)距離平方和最小準(zhǔn)則下,對(duì)DR 系統(tǒng)計(jì)算出的軌跡進(jìn)行平移,直至水聲定位系統(tǒng)位置數(shù)據(jù)到該直線(xiàn)距離平方和最小的判斷準(zhǔn)則實(shí)現(xiàn)后,提取得到的軌跡即為在統(tǒng)計(jì)意義下與真實(shí)軌跡最接近的軌跡.而該軌跡的初始點(diǎn)即為所求的初始位置.軌跡平移法確定初始位置算法流程圖如圖3 所示.
利用軌跡平移法確定初始位置方法充分利用了DR 導(dǎo)航系統(tǒng)短期精度高和水聲定位系統(tǒng)誤差不發(fā)散的特點(diǎn),進(jìn)一步減小了初始的位置誤差.
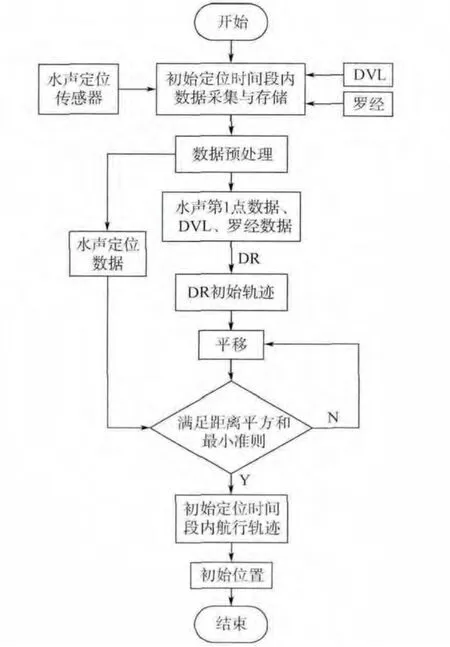
圖3 軌跡平移法算法流程圖Fig.3 Flow diagram of trajectory translation method
2 實(shí)驗(yàn)研究
2.1 實(shí)驗(yàn)條件
本文在理論研究的基礎(chǔ)上,利用一次深度為4 700 m 左右的深拖系統(tǒng)海試實(shí)驗(yàn)數(shù)據(jù)對(duì)第1 節(jié)初始位置確定方法進(jìn)行了實(shí)驗(yàn)驗(yàn)證與分析.實(shí)驗(yàn)數(shù)據(jù)包括約20 min 的羅經(jīng)、DVL 以及水聲定位系統(tǒng)USBL 的原始實(shí)際實(shí)驗(yàn)數(shù)據(jù),其中羅經(jīng)和DVL數(shù)據(jù)用于進(jìn)行DR,USBL 數(shù)據(jù)用于定位.數(shù)據(jù)中羅經(jīng)為OCTANS,航向動(dòng)態(tài)精度為0.1°/cos L,航向靜態(tài)誤差為0.05°/cos L;DVL 對(duì)底測(cè)速誤差為0.5%V,V 為速度;USBL 誤差為0.5%S,S 為位移.海試實(shí)驗(yàn)中,不同傳感器輸出數(shù)據(jù)頻率不同,需要進(jìn)行時(shí)間對(duì)準(zhǔn)和匹配,所以定位結(jié)果分析中統(tǒng)一取計(jì)算周期為15 s.
2.2 初始位置確定方法實(shí)驗(yàn)
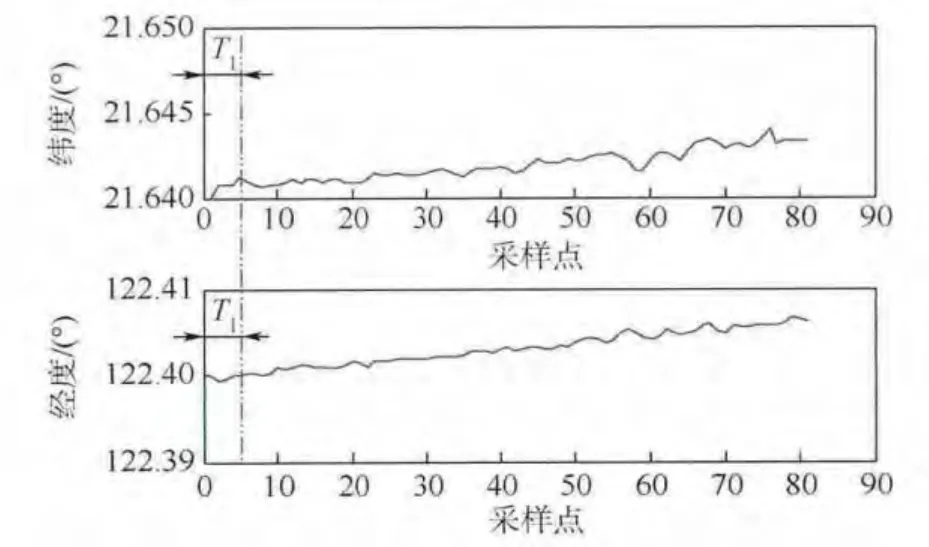
圖4 USBL 原始位置數(shù)據(jù)Fig.4 Raw position data of USBL
應(yīng)用本文方法在第2.1 節(jié)介紹的實(shí)驗(yàn)條件下開(kāi)展初始位置確定方法的實(shí)驗(yàn)研究,由于水下定位沒(méi)有絕對(duì)的參考基準(zhǔn),所以只能用水下航行器搭載導(dǎo)航系統(tǒng)來(lái)計(jì)算運(yùn)行軌跡基準(zhǔn).USBL 原始位置數(shù)據(jù)如圖4 所示,其中前75 s(T1時(shí)間段,T1為初始定位時(shí)間)數(shù)據(jù)用于求取初始位置.圖4中水下航行器直線(xiàn)行駛的數(shù)據(jù)軌跡為直線(xiàn),但存在波動(dòng),這是由于水聲定位原理和行駛過(guò)程中非理想因素的影響造成的,但這并沒(méi)有影響水下航行器直線(xiàn)行駛的趨勢(shì).采樣點(diǎn)間隔為15 s,為減小非理想因素對(duì)運(yùn)行軌跡的影響,本文采用卡爾曼濾波方法對(duì)軌跡數(shù)據(jù)進(jìn)行事后處理,得到圖5、圖6中的水下航行器運(yùn)行軌跡R,R 為直線(xiàn).R 比較真實(shí)地反映了水下航行器的運(yùn)行方向,依據(jù)T1時(shí)間段內(nèi)的R 確定的初始點(diǎn)是最準(zhǔn)確的.但是實(shí)際航行中無(wú)法事先獲得此直線(xiàn),本文利用后處理方法獲得此直線(xiàn),只用于對(duì)本文方法計(jì)算的T1時(shí)間段內(nèi)運(yùn)行軌跡進(jìn)行評(píng)價(jià).也就是說(shuō),將R 作為本文方法評(píng)價(jià)的基準(zhǔn),換句話(huà)說(shuō)就是利用與R 最接近的直線(xiàn)確定的初始位置是最準(zhǔn)確的.
本文分別采用平均值法、最小二乘法和軌跡平移法,利用在圖4 所示數(shù)據(jù)中T1時(shí)間段的數(shù)據(jù)來(lái)研究初始位置確定方法.應(yīng)用不同方法在T1時(shí)間段內(nèi)獲得的運(yùn)動(dòng)軌跡和全部時(shí)間段內(nèi)的后處理軌跡參考基準(zhǔn)R 如圖5 所示.

圖5 初始位置確定與全部數(shù)據(jù)的數(shù)據(jù)參考基準(zhǔn)Fig.5 Determination of initial position and data reference of all data
為清晰觀察T1時(shí)間段內(nèi)不同方法確定的運(yùn)行軌跡,截取T1時(shí)間段內(nèi)不同方法獲得的運(yùn)動(dòng)軌跡如圖6 所示.圖6 中,直線(xiàn)R 為經(jīng)后處理獲得的直線(xiàn)參考基準(zhǔn),曲線(xiàn)1 為利用平均值法獲得的運(yùn)行軌跡,曲線(xiàn)2 為利用本文提出的軌跡平移法計(jì)算確定的運(yùn)行軌跡,曲線(xiàn)3 為對(duì)USBL 數(shù)據(jù)進(jìn)行最小二乘擬合獲得的運(yùn)行軌跡.從圖6 中可以看出,以USBL 在T1時(shí)間段內(nèi)的平均值為運(yùn)行軌跡,受USBL 水聲定位系統(tǒng)數(shù)據(jù)波動(dòng)的影響,引入計(jì)算誤差;對(duì)USBL 數(shù)據(jù)進(jìn)行最小二乘擬合獲得的運(yùn)行軌跡,受USBL 水聲定位系統(tǒng)數(shù)據(jù)誤差分布非正態(tài)性影響,經(jīng)度和緯度軌跡方向偏離直線(xiàn)R,且計(jì)算得出的運(yùn)動(dòng)軌跡具有隨機(jī)性;軌跡平移法利用DR 系統(tǒng)輸出的位置信息和USBL 水聲定位系統(tǒng)的位置信息進(jìn)行曲線(xiàn)擬合和平移,得到新擬合曲線(xiàn)的斜率和距離更加接近真實(shí)運(yùn)動(dòng)軌跡.因此本文利用軌跡平移法確定的擬合曲線(xiàn)的起始點(diǎn)作為全部數(shù)據(jù)DR 的起始位置,這樣有助于提高DR 的精度和組合導(dǎo)航的性能.

圖6 不同方法對(duì)應(yīng)的初始運(yùn)動(dòng)軌跡Fig.6 Initial trajectory corresponding with different methods
不同方法確定的初始定位時(shí)間(T1時(shí)間段)內(nèi)的運(yùn)行軌跡與直線(xiàn)R 作對(duì)比的誤差曲線(xiàn)如圖7所示.圖7 中曲線(xiàn)1 為平均值法確定的運(yùn)行軌跡誤差曲線(xiàn);曲線(xiàn)2 為本文提出的軌跡平移法確定的運(yùn)行軌跡誤差曲線(xiàn);曲線(xiàn)3 為USBL 最小二乘擬合方法確定的運(yùn)行軌跡誤差.

圖7 不同方法確定運(yùn)行軌跡誤差Fig.7 Error of initial trajectory corresponding with different methods
采用平均值法、最小二乘法和本文方法確定的初始位置(經(jīng)度、緯度)分別是:(122.399 81°,21.640 77°)、(122.399 52°,21.640 32°)、(122.399 68°,21.640 72°).采用以上3 種方法確定的初始位置與由通過(guò)直線(xiàn)R 確定的初始位置間的距離誤差分別為:39.35、30.68、23.68 m.以其中采用本文提出的軌跡平移法得到的初始位置誤差最小,分別是平均值法和最小二乘擬合方法的60.2%和77.2%.由以上結(jié)果可知,軌跡平移法確定初始位置誤差最小,以此方法確定的DR系統(tǒng)精度有所提高,此方法可減小DR 誤差提高組合導(dǎo)航系統(tǒng)性能.
3 結(jié) 論
本文綜合研究水下運(yùn)載體動(dòng)基座直線(xiàn)航行條件下的DR/水聲定位系統(tǒng)輸出數(shù)據(jù)的特點(diǎn),提出了一種DR 軌跡平移法確定最優(yōu)初始位置的方法,經(jīng)實(shí)驗(yàn)驗(yàn)證表明:
1)本文提出的運(yùn)動(dòng)過(guò)程中水下運(yùn)載體DR系統(tǒng)初始位置確定方法,利用水聲定位系統(tǒng)提供的位置信息和DR 得到的方向信息計(jì)算得到優(yōu)化的初始位置,該方法確定的初始位置誤差最小,分別是平均值法和最小二乘擬合方法的60.2%和77.2%.
2)利用本文方法進(jìn)行初始位置的確定,提高了初始時(shí)段DR 定位方法的準(zhǔn)確程度.
3)提高DR 的基礎(chǔ)上,也提高了組合導(dǎo)航的性能,有助于水下地形測(cè)繪、勘探等系統(tǒng)提高成圖質(zhì)量.
為使本文方法適應(yīng)海試實(shí)驗(yàn)在線(xiàn)定位,仍需優(yōu)化算法,提高其實(shí)時(shí)性.
References)
[1] 王淑煒,張延順.基于羅經(jīng)/DVL/水聲定位系統(tǒng)的水下組合導(dǎo)航方法研究[J].海洋技術(shù)學(xué)報(bào),2014,33(1):19-23.
Wang S W,Zhang Y S.Research on the underwater integrated navigation method based on compass/DVL/hydroacoustic position system[J].Journal of Ocean Technology,2014,33(1):19-23(in Chinese).
[2] Rigby P,Pizarro O,Williams S B.Towards geo-referenced AUV navigation through fusion of USBL and DVL measurements[C]∥Proceedings of OCEANS 2006.Piscataway,NJ:IEEE Press,2006:1-6.
[3] 馮子龍,劉健,劉開(kāi)周.AUV 自主導(dǎo)航航位推算算法的研究[J].機(jī)器人,2005,27(2):168-172.
Feng Z L,Liu J,Liu K Z.Dead reckoning method for autonomous navigation of autonomous underwater vehicles[J].Robot,2005,27(2):168-172(in Chinese)
[4] Jirawimut R,Ptasinski P,Garaj V,et al.A method for dead reckoning parameter correction in pedestrian navigation system[J].IEEE Transactions on Instrumentation and Measurement,2003,52(1):209-215.
[5] 萬(wàn)磊,李璐,劉建成,等.一種基于航位推算的水下機(jī)器人導(dǎo)航算法[J].中國(guó)造船,2005,45(4):77-82.
Wan L,Li L,Liu J C,et al.Navigation algorithm based on dead reckoning of automatic underwater vehicle[J].Shipbuilding of China,2005,45(4):77-82(in Chinese).
[6] Yang X Y,He H.GPS/DR integrated navigation system based on adaptive robust Kalman filtering[C]∥Proceedings of International Conference on Microwave and Millimeter Wave Technology.Piscataway,NJ:IEEE Press,2008,4:1946-1949.
[7] Chung H,Ojeda L,Borenstein J.Accurate mobile robot deadreckoning with a precision-calibrated fiber-optic gyroscope[J].IEEE Transactions on Robotics and Automation,2001,17(1):80-84.
[8] 朱維慶,朱敏,劉曉東,等.海底微地貌測(cè)量系統(tǒng)[J].海洋測(cè)繪,2003,23(3):27-31.
Zhu W Q,Zhu M,Liu X D,et al.The survey system for detailed relief on sea floor[J].Hydrographic Surveying and Charting 2003,23(3):27-31(in Chinese).
[9] 朱維慶,劉曉東,張東升,等.高分辨率測(cè)深側(cè)掃聲納[J].海洋技術(shù),2005,24(4):29-35.
Zhu W Q,Liu X D,Zhang D S,et al.High resolution bathymetric sidescan sonar[J].Ocean Technology,2005,24(4):29-35(in Chinese).
[10] 孫樹(shù)民,李?lèi)?淺談水下定位技術(shù)的發(fā)展[J].廣東造船,2004(4):19-24.
Sun S M,Li Y.The development of underwater positioning technology[J].Shipbuilding of Guangdong,2004(4):19-24(in Chinese).
[11] Kim K,Choi H T,Lee C M.Underwater precise navigation using multiple sensor fusion[C]∥Proceedings of 2013 IEEE International Underwater Technology Symposium(UT).Piscataway,NJ:IEEE Press,2013:1-4.
[12] 劉曉東,張方生,朱維慶,等.深水聲學(xué)拖曳系統(tǒng)[J].海洋測(cè)繪,2006,25(6):37-40.
Liu X D,Zhang F S,Zhu W S,et al.Towed deep water acoustics system[J].Hydrographic Surveying and Charting,2006,25(6):37-40(in Chinese).
[13] 蔣青吉,肖昌榮,肖波.HiPAP100 水下定位系統(tǒng)在海底攝像中的應(yīng)用[J].海洋地質(zhì)前沿,2013,29(11):62-66.
Jiang Q J,Xiao C R,Xiao B.The application of HiPAP 100 underwater positioning system to the seabed video system survey[J].Marine Geology Frontiers,2013,29(11):62-66(in Chinese).
[14] 李守軍,包更生,吳水根.水聲定位技術(shù)的發(fā)展現(xiàn)狀與展望[J].海洋技術(shù),2005,24(1):130-135.
Li S J,Bao G S,Wu S G.A practical overview and prospect of acoustic positioning technology[J].Ocean Technology,2005,24(1):130-135(in Chinese).
[15] 吳永亭,周興華,楊龍.水下聲學(xué)定位系統(tǒng)及其應(yīng)用[J].海洋測(cè)繪,2003,23(4):18-21.
Wu Y T,Zhou X H,Yang L.Underwater acoustic positioning system and its application[J].Hydrographic Surveying and Charting,2003,23(4):18-21(in Chinese).
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
兒童故事畫(huà)報(bào)(2019年5期)2019-05-26 14:26:14
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12