兩種典型轎車前懸架運動特性的對比研究*
2015-04-12 09:27:32蘭鳳崇陳吉清
汽車工程 2015年10期
關鍵詞:優化
熊 飛,蘭鳳崇,陳吉清,李 罡
(1.華南理工大學機械與汽車工程學院,廣州 510640; 2.廣州汽車工業集團汽車工程研究院,廣州 511434)
?
2015198
兩種典型轎車前懸架運動特性的對比研究*
熊 飛1,2,蘭鳳崇1,陳吉清1,李 罡1,2
(1.華南理工大學機械與汽車工程學院,廣州 510640; 2.廣州汽車工業集團汽車工程研究院,廣州 511434)
為了從定性和定量的角度全面揭示麥弗遜式和雙橫擺臂式兩種懸架的運動特性及其影響規律,以最小化車輪定位參數、側傾中心高度和抗點頭率等參數梯度的絕對值為目標,采用懸架運動學參數對硬點坐標的靈敏度分析和運用遺傳算法進行運動學特性優化相結合的方法,對比分析了這兩種懸架的運動學特性,通過試驗驗證了優化結果,最后給出了汽車開發過程中對這兩種懸架選型的建議。
轎車;前懸架;運動學特性;靈敏度分析;遺傳算法
前言
汽車懸架類型的選擇和懸架運動學性能的設計對車輛的操縱穩定性、平順性、制動安全性[1-4]等都有重要的影響。因此,汽車正向開發過程中,不同結構形式的懸架的運動學性能的差異是懸架類型的選擇及匹配需要最優先考慮的問題。
目前,麥弗遜式懸架和雙橫臂式懸架是汽車前懸架中應用最廣泛的兩種類型的懸架。國內外學者對這兩種懸架也做了很多研究[5-7],這些研究的結果表明,麥弗遜式懸架結構簡單,簧載質量小,占用空間小,響應較快,制造成本低,而雙橫臂式懸架對前輪定位參數的變化設定自由度較大,有利于提高車輪穩定性等。但是,還需要對比研究這兩種懸架運動學性能本質上的差異,以及在車輛開發過程中如何進行精細考慮懸架選型。
懸架的K特性是懸架運動學(Kinematics)的簡稱,描述的是車輪定位參數在懸架上下跳動和轉向時的變化;懸架的C特性是懸架彈性運動學(Compliance)的簡稱,描述的是由于輪胎與地面之間的力和力矩作用引起的車輪定位參數的變化。二者統稱為懸架運動學和彈性運動學特性,簡稱為懸架K&C(Kinematics & Compliance)特性。
本文中結合自主品牌轎車懸架開發選型工作,以車輪定位參數、側傾中心高度、抗點頭率等參數為研究對象,建立了兩種懸架的分析仿真模型,采用將懸架硬點運動學靈敏度和運動學性能分析優化相結合的方法,對比分析了麥弗遜式前懸架和雙橫臂式懸架運動學性能的優缺點,通過試驗優化計算的部分結果,對兩種懸架的性能做了比較分析并給出了汽車開發過程中懸架選型建議。
1 懸架硬點靈敏度分析
1.1 兩種懸架試驗模型的建立
本文中在ADAMS/CAR軟件中分別建立1/2車輛麥弗遜式懸架和雙橫臂式懸架模型。懸架系統坐標系以車輛前進行駛方向的反方向為x軸正方向,以同軸車輪由左指向右方向為y軸正方向,以垂直地面向上方向為z軸正方向。根據已知的麥弗遜式懸架硬點、部件參數和拓撲結構關系建立其多體模型。同時對麥弗遜式懸架進行簡化,演變出雙橫臂式懸架。為了使兩種懸架具有可比性,要做到兩種懸架車輪定位參數、彈簧剛度、減振器阻尼特性、簧上質量等完全相同。
1.2 兩種懸架車輪定位參數
兩種懸架拓撲結構試驗模型如圖1和圖2所示。Pt0/Pt0′代表作為計算車輪定位參數用的車輪中心外參考點,它由車輪中心沿y軸方向向外移動100mm而得,Pt1/Pt1′代表下擺臂與副車駕的前連接點,Pt2/Pt2′代表下擺臂與副車駕的后連接點,Pt3/Pt3′代表下擺臂與轉向節的連接點,Pt4/Pt4′代表轉向拉桿與轉向節的連接點,Pt5/Pt5′代表轉向拉桿與轉向器的連接點,Pt6′代表上擺臂與車身支座的前連接點,Pt7′代表上擺臂與車身支座的后連接點,Pt8/Pt8′代表麥弗遜式懸架減振器的上安裝點和雙橫臂式懸架上擺臂與轉向節的連接點,Pt9/Pt9′代表車輪中心點。當已知兩種懸架以上硬點時,可以通過懸架三維硬點坐標求出車輪定位參數[1]如下:
(1)
(2)
γ=yPt9/Pt9′-yPt0/Pt0′
(3)
ξ=xPt9/Pt9′-xPt0/Pt0′
(4)
(5)
式中:α為車輪前束角;β為車輪外傾角;γ為輪距變化;ξ為軸距變化;ψ為主銷后傾。
1.3 懸架運動學靈敏度分析
本文中應用參數試驗法進行懸架運動學靈敏度分析,即求取懸架諸運動學參數對各硬點坐標變化的敏感性。本文中研究以兩種懸架各硬點坐標偏離設計值±0.5mm為因子水平,計算兩水平因子間懸架的前束角梯度等5種梯度和側傾中心高度與抗點頭率共7個響應。
車輪定位參數梯度表示車輪輪心基于設計位置上下跳動±25mm時,車輪定位參數的變化量與輪心行程的比值。
表1和表2分別示出兩種懸架的運動學參數靈敏度分析的結果。由表1和表2可以看出,麥弗遜式懸架車輪外傾角梯度和主銷后傾角梯度對硬點坐標變化的靈敏度較低,懸架設計時外傾角梯度和主銷后傾角梯度較難優化,車輪定位參數匹配的靈活性較低。而雙橫臂式懸架諸運動學參數對各硬點坐標變化的靈敏度都較高,更容易進行車輪定位參數匹配。

表1 麥弗遜式懸架運動學靈敏度分析結果
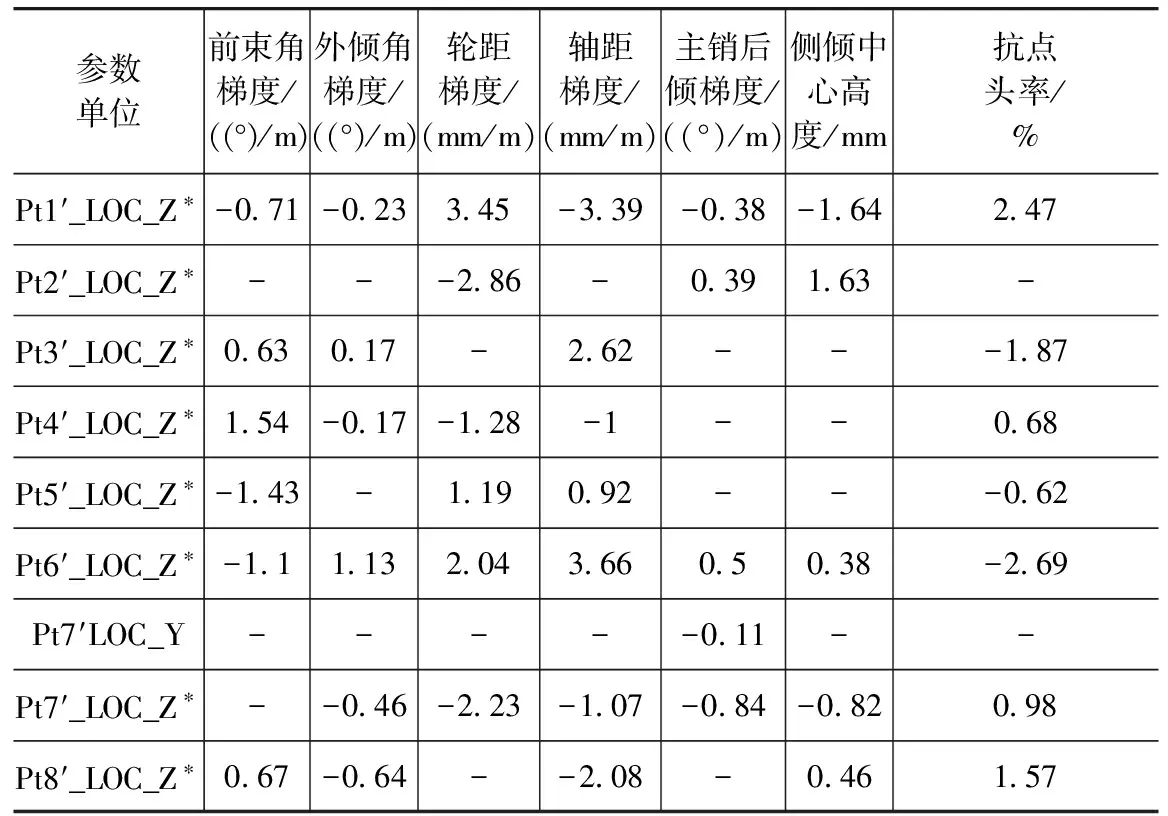
表2 雙橫臂式懸架運動靈敏度分析結果
麥弗遜式懸架總共有6個硬點的6個方向(表1中帶*號者)對懸架運動學特性影響較大,而雙橫臂式懸架總共有8個硬點的8個方向(表2中帶*號者)對懸架運動學特性影響較大,雙橫臂式懸架運動學特性設計的自由度較大。
2 兩種懸架運動學性能的優化
遺傳算法是一種基于自然選擇和群體進化機制,適合數值求解多參數、多變量、多目標的優化問題,在尋求全局最優解方面具有高效率的參數優化方法。遺傳優化面對群體采用概率轉移規則,可同時對多個優化參數進行全域尋優。因此,本文中采用遺傳算法對懸架運動學性能參數進行優化[8]。
為了保證車輛有良好的操縱穩定性和較小的輪胎磨損量,本文中以車輪前束角變化梯度、車輪外傾角變化梯度、車輪輪距變化梯度、車輪軸距變化梯度和主銷后傾角變化梯度絕對值的最小化作為優化目標。
minF=[fToe,fCamber,fTrack,fBase,fCaster]T
(6)
式中:fToe為車輪前束角變化;fCamber為車輪外傾角變化;fTrack為車輪輪距變化;fBase為車輪軸距變化;fCaster為主銷后傾角變化;α,β和ψ的下標“+”和“-”分別表示車輪向上和向下移動25mm時的參數值。懸架構建硬點的空間位置決定了懸架的車輪定位參數運動規律,因此選取懸架各個硬點的三坐標值(xi,yi,zi)為設計變量。為了滿足整車抗側傾和抗俯仰性能要求,選擇懸架側傾中心高度和抗點頭率為約束條件。
(7)
式中:σi和τi分別為側傾中心高度和抗點頭率。為了滿足整車總布置避免干涉發生等要求,各設計變量也必須在一定范圍內:
(8)
懸架運動學特性對整車操作穩定性有重要影響,因此本文中基于兩種懸架試驗模型,分別進行同向輪跳試驗,輪跳范圍為-80~+80mm,分別從車輪定位參數、軸距、輪距、側傾中心、抗點頭率等7個方面進行分析對比。
2.1 同向輪跳前束角變化
前輪前束角與車輪跳動關系仿真結果曲線如圖3所示。從圖中曲線可以求出,車輪在-25~+25mm內跳動時,麥弗遜式懸架輪跳前束角梯度為-4.6°/m,經過優化后輪跳前束角梯度為-4.1°/m,雙橫臂式懸架輪跳前束角梯度為-2.7°/m,經過優化后輪跳前束角梯度為-5.3°/m。兩種懸架前束角梯度都在較理想范圍(-6~-2°/m)[9]內。當車輪向上跳動到極限時,麥弗遜式懸架的前束角增大較快,雙橫臂式懸架的前束角變化線性度較好。
2.2 同向輪跳外傾角變化
同向輪跳外傾角與車輪跳動關系仿真結果曲線如圖4所示。從圖中曲線可以求出,車輪在小范圍(-25~25mm)內跳動,輪跳外傾角梯度為-7.3°/m,經過優化后輪跳外傾角梯度為-7.9°/m。雙橫臂式懸架輪跳外傾角梯度為-15.1°/m,經過優化后輪跳外傾角梯度為-13.5°/m。當車輪向上跳動到極限時,麥弗遜式懸架的外傾角緩慢增大,雙橫臂式懸架的外傾角急劇下降;當車輪向下劇烈跳動時,則情況相反,麥弗遜式懸架的外傾角出現急劇增大的情況,雙橫臂式懸架的外傾角緩慢增大,雙橫臂式的輪跳外傾曲線更有利于增加輪胎的抓地力,有利于車輛極限側向加速度下的行駛穩定性。
2.3 同向輪跳軸距變化
同向輪跳軸距與車輪跳動關系仿真結果曲線如圖5所示。從圖中曲線可以求出,車輪在小范圍(-25~25mm)內跳動,麥弗遜式懸架輪跳軸距變化梯度為-19.4mm/m,經過優化后軸距變化梯度為-16.8mm/m。雙橫臂式懸架輪跳軸距變化梯度為-30.3mm/m,經過優化后軸距變化梯度為-29.2mm/m。當車輪向上劇烈跳動時,麥弗遜式懸架的軸距變化梯度緩慢增大,雙橫臂式懸架的軸距變化梯度變化較快。在設計狀態,麥弗遜式懸架比雙橫臂式懸架縱向舒適性要好。
2.4 同向輪跳輪距變化
同向輪跳輪距與車輪跳動關系仿真結果曲線如圖6所示。從圖中曲線可以求出,車輪在小范圍(-25~25mm)內跳動,麥弗遜式懸架車輪輪距變化梯度為-33.4mm/m,經過優化后輪距變化梯度為-39mm/m。雙橫臂式懸架車輪輪距梯度為-57.8mm/m,經過優化后輪距梯度為35mm/m。優化后,當車輪向上劇烈跳動時,麥弗遜式懸架的輪距變化梯度變化較快。在設計狀態,麥弗遜式懸架比雙橫臂式懸架縱向輪胎偏磨風險要高。
2.5 同向輪跳主銷后傾角
主銷后傾角與車輪跳動關系仿真結果曲線如圖7所示。從圖中曲線可以求出,車輪在小范圍(-25~25mm)內跳動,麥弗遜式懸架主銷后傾角變化梯度為13.8°/m,優化后主銷后傾角變化梯度為13.5°/m。雙橫臂式懸架主銷后傾角變化梯度為5.7°/m,經過優化后主銷后傾角梯度為10.1°/m。但是當車輪向上或向下劇烈跳動時,雙橫臂式懸架主銷后傾角都比設計狀態要大,同時變化比較快,這樣有利于增加制動俯仰時車輪回正性等。
2.6 懸架抗點頭率
懸架抗點頭率與車輪跳動關系仿真結果曲線如圖8所示。從圖中可以看出,在車輪跳動為零時,麥弗遜式懸架抗點頭率為26%,經過優化后懸架抗點頭率為31%。雙橫臂式懸架抗點頭率為20%,經過優化后懸架抗點頭率為28%。雖然在輪跳為零時,麥弗遜式懸架抗點頭率比雙橫臂式懸架大,但是隨著輪跳增加,雙橫臂式懸架抗點頭率增加較快,所以雙橫臂式懸架也可以獲得較好的抗點頭性能。
2.7 同向輪跳側傾中心
側傾中心位置與車輪跳動關系仿真結果曲線如圖9所示。從圖中可以看出,在輪跳為零時,麥弗遜式懸架側傾中心高度為23mm,經過優化,側傾縱向高度為31mm。雙橫臂式懸架側傾中心高度為48mm,經過優化,側傾中心高度為35mm。麥弗遜式懸架的側傾中心低于雙橫臂式懸架,并且隨著車輪向上跳動增加,麥弗遜式懸架側傾中心下降比雙橫臂式要快,因此雙橫臂式懸架具有更高的側傾穩定性。
3 試驗與優化結果對比
以上麥弗遜式懸架運動學性能優化結果最終被應用到某自主品牌轎車前懸架設計過程中,為了驗證優化結果,進行K&C臺架試驗(見圖10)。汽車懸架K&C特性試驗臺是專門用來測量懸架運動學特性和彈性運動學特性的試驗設備,采用準靜態加載方式,將車身固定,然后通過給車輛施加4個方向的載荷,測試車輪定位等參數變化,對比試驗與優化設計結果差異。
試驗要求:
(1) 車輪垂直力加載范圍:0~10 000N;垂直行程:±150mm;
(2) 車身固定,限制車身的任何運動;
(3) 車輪制動,限制車輪的轉動。
試驗步驟:
(1) 首先明確試驗車輛信息和試驗要求,按照試驗車輛的軸距、輪距調整試驗臺加載墩的位置和加載方向到初始零位置;
(2) 調整車輛配重,使用吊具將試驗車輛吊裝到試驗臺上,測量各個車輪的載荷,將4個加載墩加載到試驗車設計輪荷值,使用夾具固定車身的裙邊。利用制動踏板鎖止器將被測車輛的制動踏板固定,以限制車輪的轉動;
(3) 安裝車輪測量系統及其傾角傳感器和轉向系統轉矩、轉角信號線等;
(4) 按照要求,完成各工況試驗。
圖11是樣車麥弗遜式懸架前束角隨輪跳變化優化和試驗結果的對比,車輪在范圍(-25~+25mm)內跳動,前束角梯度測量結果為-4.3°/m,與優化分析結果絕對值差值只有0.2°/m,并且從試驗測量曲線看出,樣車懸架前束角變化曲線性度較好,能滿足性能設定要求。
圖12是樣車麥弗遜式懸架外傾角隨輪跳變化優化和試驗結果的對比,車輪在范圍(-25~+25mm)內跳動,外傾角測量結果為-8.5°/m,與優化分析結果絕對值差異只有0.6°/m,并且從試驗測量曲線看出,試驗與優化曲線吻合度較好,樣車車輪外傾角能滿足性能設定要求。
圖13是樣車麥弗遜式懸架軸距隨輪跳變化優化和試驗結果的對比,車輪在范圍(-25~+25mm)內跳動,軸距變化梯度測量結果為-18.7mm/m,與優化分析結果絕對值差異只有2.1mm/m,并且從試驗測量曲線看出,試驗與優化曲線吻合度較好,樣車輪跳軸距變化能滿足性能設定要求。
圖14是樣車麥弗遜式懸架輪距隨輪跳變化優化和試驗結果的對比,車輪在范圍(-25~+25mm)內跳動,軸距變化梯度測量結果為-45mm/m,與優化分析結果絕對值差異有6mm/m,并且從試驗測量曲線看出,試驗與優化曲線趨勢吻合度較好,樣車輪跳輪距變化基本滿足性能設定要求。
4 結論
通過優化這兩種懸架,都能得到:較好的輪跳轉向性能、車輪回正性和抗點頭性能,有利于車輛的行駛穩定性。在設計狀態時麥弗遜式懸架的抗點頭性能比雙橫臂式懸架好,但是隨著車輪上跳量增加,雙橫臂式懸架抗點頭性逐漸提高。從軸距變化梯度來看,麥弗遜式懸架縱向舒適性比雙橫臂式懸架好。
麥弗遜式懸架運動學參數(特別是車輪外傾角和主銷后傾角)對硬點坐標變化的靈敏度比雙橫臂式懸架低,故其設計自由度小。從優化結果可以看出,麥弗遜式懸架外傾角梯度優化前后的變化較小,這決定了在較大側向加速度時車輛的穩定性較弱。雙橫臂式懸架可以獲得較高的側傾中心高度,同時車輪輪距變化梯度相對較小,說明它既可獲得較好的抗側傾性能,又能獲得較小的輪胎偏磨。
兩種懸架在運動學性能方面的區別決定了懸架有不同的應用領域。建議對于前軸軸荷較大的車輛優先考慮采用雙橫臂式懸架,這樣前軸穩定桿可以設定較細,以便在不犧牲舒適性的同時,保證車輛有較好的行駛穩定性和抗側傾性能。反之,可以優先考慮采用麥弗遜式懸架,它能在滿足一定的操穩性能要求的同時降低成本。
[1] 陸建輝,周孔亢.電動汽車麥弗遜前懸架設計及參數優化[J].機械工程學報,2012(8):98-103.
[2] 上官文斌,王江濤.全地形越野車前雙橫臂獨立懸架與轉向系統的設計分析[J].汽車工程,2008,30(4):345-348.
[3] Hosein Habibi, Kourosh H Shirazi, Mohammad Shishesaz. Roll Steer Minimization of McPherson-strut Suspension System Using Genetic Algorithm Method[J]. Mechanism and Machine Theory,2008(43):57-67.
[4] Seong Jun Park, Jenong Hyun Sohn. Effects of Camber Angle Control of Front Suspension on Vehicle Dynamic Behaviors[J]. Journal of Mechanical Science and Technology,2012(2):307-313.
[5] 湯林生,易高.雙球頭型雙橫臂前懸架系統的開發[J].汽車工程,2011,33(1):56-59.
[6] Hazem Ali Attia. Dynamic Modelling of the Double Wishbone Motor-Vehicle Suspension System[J]. European Journal of Mechanics,2002(21):167-174.
[7] Mahmoodi-Kalerbar M, Javanshir I, Asadi K, et al. Optimization of Suspension System of Off-road Vehicle for Vehicle Performance improvement[J]. Journal of Central South University,2013,20(4):902-910.
[8] Baumal A E, McPhee J J, Calamai P H. Application of Genetic Algorithms to the Design Optimization of an Active Vehicle Suspension System[J]. Computer Methods in Applied Mechanics and Engineering,1998(163):87-94.
[9] 耶爾森·賴姆帕爾.汽車底盤基礎[M].張洪欣,余卓平,譯.北京:科學普及出版社,1992:136-176.
A Comparative Study on the Kinematic Characteristicsof Two Typical Front Suspensions of Sedan
Xiong Fei1,2, Lan Fengchong1, Chen Jiqing1& Li Gang1,2
1.SchoolofMechanical&AutomotiveEngineering,SouthChinaUniversityofTechnology,Guangzhou510640; 2.AutomotiveEngineeringInstitute,GuangzhouAutomobileGroupCo.,Ltd.,Guangzhou511434
For qualitatively and quantitatively revealing the kinetic characteristics of McPherson suspension and double wishbone suspension and their law of influence, with minimizing the absolute values of gradients of wheel alignment parameters, roll center height and anti-dive rate as objective, the kinetic characteristics of two types of suspension are comparatively analyzed by using sensitivity analysis of suspension kinetic parameters to the coordinates of hard-points, combined with kinetic characteristics optimization with genetic algorithm. The results of optimization are verified by tests. Finally a recommendation on the selection of two types of suspension in the process of vehicle development is given.
sedan; front suspension; kinematic characteristics; sensitivity analysis; genetic algorithm
*廣東省戰略性新興產業專項資金項目資助。
原稿收到日期為2013年12月3日,修改稿收到日期為2014年4月24日。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45