基于混雜系統理論的混合動力汽車驅制動控制研究*
2015-04-12 09:27:28尹安東路瑞剛
汽車工程 2015年10期
尹安東,趙 韓,孫 駿,路瑞剛
(1.合肥工業大學機械與汽車工程學院,合肥 230009; 2.汽車技術與裝備國家地方聯合工程研究中心,合肥 230009;3.中國汽車工程學會,北京 100055)
?
2015196
基于混雜系統理論的混合動力汽車驅制動控制研究*
尹安東1,2,趙 韓1,2,孫 駿1,2,路瑞剛3
(1.合肥工業大學機械與汽車工程學院,合肥 230009; 2.汽車技術與裝備國家地方聯合工程研究中心,合肥 230009;3.中國汽車工程學會,北京 100055)
基于混雜系統理論,對后輪驅動混合動力汽車的動力系統進行分析,基于混雜自動機模型建立了HEV動力系統控制模型。提出了模式變換式驅動控制策略和制動力協調控制的再生制動控制策略。采用Simulink/Stateflow混合建模方法,建立了HEV動力系統控制策略仿真模型,并進行了實例HEV樣車性能仿真和道路試驗。結果表明:實例HEV性能滿足設計要求;在中國典型城市公交循環工況下,與同類型傳統汽車相比,燃料消耗量減少15.9%。
混合動力汽車;混雜系統理論;動力系統;再生制動;控制策略
前言
混合動力汽車(hybrid electric vehicle, HEV)由兩個或兩個以上的能量源提供動力,其動力系統的控制比傳統汽車單一動力能源的控制復雜得多[1]。
HEV具有動力系統工作模式頻繁切換和運行工況多變等特點,其動力系統控制是一個典型的混雜動態系統控制問題。混雜動態系統簡稱混雜系統(hybrid systems, HS),是由連續變量動態系統和離散變量動態系統相互混合、相互作用而形成的統一的動態系統[2],混雜動態系統理論(簡稱混雜系統理論)為解決混雜動態系統控制問題提供了理論基礎[3-4]。本文中以某款后輪驅動的HEV為研究對象,基于混雜系統理論對HEV動力系統驅動和制動的控制進行研究,并在Simulink/Stateflow和Advisor平臺上進行聯合建模與分析。
1 HEV動力系統的分析
1.1 HEV動力系統的結構和運行模式
本文中所研究的HEV的動力系統結構如圖1所示,該動力系統在不同的工況下具有不同的運行模式,包括純電動驅動、發動機-發電機組驅動、混合驅動、充電(包括行車充電和停車充電)和再生制動等運行模式,且頻繁切換。
1.2 HEV動力系統的特征分析
HEV動力系統的控制是根據各種傳感器的檢測信號,通過控制策略確定各總成部件(發動機-發電機組、電機、電池組)的工作狀態和整車運行模式。其中檢測信號是連續變化量,而整車的運行模式在運行過程中,要進行模式切換,屬于離散事件。故HEV動力系統具有混雜系統特征。以往的經典控制理論和現代控制理論體系難以適用于混雜系統控制問題,而混雜系統理論為混雜系統的控制等提供了理論支撐,同時為具有混雜系統特征的HEV動力系統的控制研究提供了新途徑。
2 基于混雜系統理論的HEV動力系 統描述
2.1 混雜系統理論模型
混雜系統的理論研究主要集中在混雜系統的建模、分析、控制和應用等方面。常用的混雜系統模型有混雜自動機模型(hybrid automaton model)和混合Petri網模型等[5]。其中,混雜自動機模型將描述連續動態行為的微分方程嵌入到傳統的離散狀態機模型中,使自動機模型兼備描述連續行為的能力,成為描述混雜系統的常見工具[6],其定義為
H=(Q,X,V,Y,Init,f,Inv,E,R,φ)
(1)
式中:H為混合狀態空間;Q為有限離散狀態變量集合,描述離散狀態;X為連續狀態變量集合,描述連續狀態;V為有限的輸入變量集合,含連續變量和離散變量;Y為輸出變量集合,含連續變量和離散變量;Init為系統初始狀態的集合;f為狀態量和輸入變量的微分或差分方程;Inv為給每個離散狀態指定與連續變量X和輸入變量V有關的不變集合;E為離散狀態之間的離散事件集合;R為離散事件和指定狀態切換后連續狀態變量X的默認狀態值;φ為給每個狀態指定一個容許輸入域。
混雜自動機模型可根據給定的混雜系統模型和性能指標,尋找可行的控制策略,保證被控系統滿足給定的性能指標。
Matlab是混雜系統仿真研究中常用的工具,其中以有限狀態機(finite state machine, FSM)為理論基礎的Stateflow軟件,允許使用流程圖和狀態轉移的概念,能夠虛擬建模和仿真離散變量動態系統,而Matlab/Simulink則可對連續變量動態系統及其與離散變量動態系統的接口進行建模和仿真,因此可采用Simulink/Stateflow混合建模方法,搭建連續變量動態系統和離散變量動態系統的建模仿真平臺,來實現基于自動機模型的混雜系統的建模與仿真,從而為具有混雜系統特征的HEV動力系統控制、建模和仿真分析提供技術支持。
2.2 基于自動機模型的HEV動力系統模型描述
HEV動力系統具有明顯的混雜系統特征,因此HEV動力系統控制模型可用混雜自動機模型(見式(1))來描述[7]。具體描述如下:
HEV的動力系統可包括6個狀態:
q={q1,q2,q3,q4,q5,q6}∈Q
(2)
式中:q為離散狀態變量;q1~q6分別為靜止狀態、停車充電狀態、發動機-發電機組驅動狀態、混合驅動狀態、純電動狀態和再生制動狀態。在HEV動力系統中:
(1) 連續狀態變量為x={ωe,ωm}∈X,其中ωe和ωm分別為發動機轉速和電機轉速。
(2) 連續輸入變量為vc={Pe,Pm(Pr),SOC}∈VC,其中Pe,Pm,Pr和SOC分別為發動機功率、電機功率、需求功率和電池荷電狀態,VC為連續輸入變量集合;離散輸入變量為:vd={v1,v2}∈VD,其中v1表示發動機的開關狀態,v2表示電池的充放電狀態,VD為離散輸入變量集合。
(3) 連續輸出變量為yc={v,SOC,ωe,ωm}∈YC,包含車速v、電池荷電狀態SOC、發動機轉速ωe和電機轉速ωm,YC為連續輸出變量集合;離散輸出變量為yd={braking/Yes/No}∈YD,表示汽車是否在制動狀態。
(4)Init?Q×X為HEV動力系統的初始狀態。
(5) 對于HEV動力系統來說,具體的不變集合Inv為
(3)
式中:Engine_on和Engine_off分別為發動機開啟和關閉狀態;Ess_on和Ess_off分別為電池放電和充電狀態。
(6)E為離散狀態模式之間的離散事件集合,對于HEV動力系統6個狀態模式,確定可能切換的離散事件集合為E={e1,e2,…,e17},各狀態模式之間的切換關系如圖2所示。
圖中,STOP(q1)為靜止狀態模式;IDLE(q2)為停車充電狀態模式;ENGINE(q3)為發動機-發電機組驅動狀態模式;ENG_BAT(q4)為混合驅動狀態模式;BATTERY(q5)為純電動狀態模式;EnergyREC(q6)為再生制動狀態模式;e1,e2,…,e17為各狀態模式之間切換的離散事件。
(7)φ為給每個狀態指定一個容許輸入域,也就是定義了輸入作用域。在HEV動力系統中,輸入量發動機功率Pe、電機功率Pm和動力電池SOC值都有一定容許的取值范圍。
由上述可知:對于具有混雜系統特征的HEV動力系統,控制輸入量V和狀態模式切換的離散事件E是HEV動力系統控制核心,因此設計合適的HEV動力系統驅動和制動控制策略,實現最佳的輸入量和狀態模式切換,并獲得最優的動力系統的能量效率尤為必要。
3 HEV動力系統控制策略設計
3.1 模式變換式驅動控制策略設計
HEV動力系統通常有恒溫器式和功率跟隨式兩種控制策略,兩者各有優缺點。本文中設計了一種集恒溫器式和功率跟隨式控制策略優點的模式變換式驅動控制策略:當負載功率較小且SOC較高時,發動機被關閉,主要用純電動模式;發動機在SOC較低或負載功率較大時均會啟動,發動機帶動發電機工作;當加速和爬坡時,采用功率跟隨模式;當負載功率要求低時,采用恒溫器模式,從而充分利用發動機和電池組的高效率區,使動力系統達到能量效率最優。所設計的模式變換式驅動控制策略的控制規則,如表1所示。
表中,On為發動機開啟狀態;Off為發動機關閉狀態;Hold為發動機保持狀態;Pr為整車需求功率;Pe為發動機功率;Pb為電池充放電功率,Pb<0為充電功率,Pb>0為放電功率;Popt為發動機最優工作點輸出功率;SOCmin和SOCmax分別為電池組設定的最小、最大值;Pmin和Pmax為發動機最小和最大輸出功率。其中Pr<0時系統處于制動狀態,由再生制動控制模塊控制。
3.2 協調控制的再生制動控制策略設計
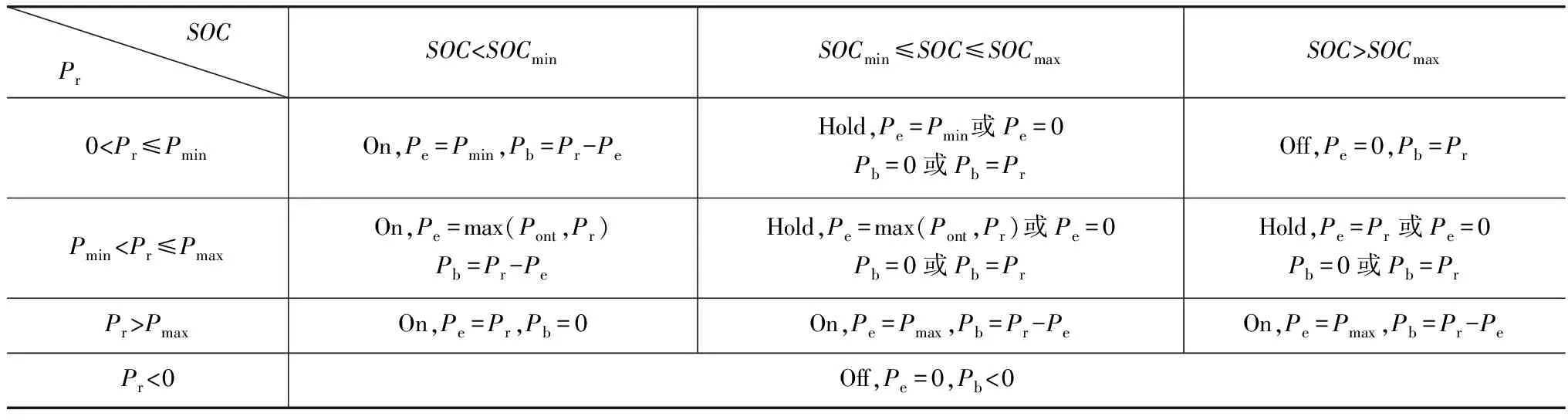
表1 模式變換式驅動控制策略的控制規則
如何分配前后輪制動器摩擦制動力和電機再生制動力,以提高整車的能量回收率和安全舒適性是HEV動力系統制動力分配策略研究的重點[8-9]。本文中在理想制動力分配策略的基礎上,設計一種電機再生制動力、摩擦制動力和整車前后輪制動力協調控制的再生制動控制策略,并按制動強度的大小將HEV的制動分為3種模式:純電機再生制動模式、復合制動模式(電機再生制動+摩擦制動)和傳統摩擦制動模式。圖3為某款HEV前后輪制動力分配曲線。圖中,OA段,制動強度較小,系統處于純電機再生制動模式;AB段,隨著制動強度的增大,電機再生制動力不能滿足駕駛員制動力需求,前后輪制動力分配點沿著AB線(r線)轉移;隨著制動強度繼續增大,BC段的前后輪制動力分配點沿著理想制動力分配曲線(I曲線)轉移。AB段和BC段,系統處于復合制動模式。到達C點后,前后輪制動力沿原制動系統β線上升,系統處于傳統摩擦制動模式。
4 HEV動力系統控制策略建模
4.1 模式變換式驅動控制策略建模
基于混雜自動機模型的HEV動力系統描述(見式(1)~式(3))和有限狀態機原理,根據表1所示的控制規則,利用Simulink/Stateflow仿真平臺建立HEV動力系統模式變換式驅動控制策略仿真模型,其中基于混雜自動機模型的HEV動力系統的模式變換式驅動策略模式切換關系如圖4所示。
4.2 協調控制的再生制動控制策略建模
基于混雜自動機模型的HEV動力系統描述(見式(1)~式(3))和HEV前后輪制動力分配曲線(圖3),利用Simulink/Stateflow仿真平臺建立后輪驅動HEV動力系統制動力協調控制的再生制動控制策略仿真模型,其中基于混雜自動機模型的HEV動力系統再生制動控制策略模式切換關系如圖5所示。
圖中共有5種狀態模式:(1)較低制動強度(low_brake)的純電機制動模式;(2)中等制動強度(mid_brake)的復合制動模式,前后軸制動力沿r線分配;(3)較高制動強度(high_brake)的復合制動模式,前后軸制動力按照I曲線分配;(4)緊急制動(emergency)的傳統摩擦制動模式,前后軸制動力按β線分配;(5)非制動狀態模式(no brake)z≤0。
5 實例HEV動力系統控制的仿真
5.1 HEV整車仿真模型的建立
首先利用Simulink建立發動機、電機和動力電池組等主要部件的仿真模型,然后將基于Simulink/Stateflow所建立的基于混雜自動機模型的HEV動力系統模式變換式驅動控制策略仿真模型和制動力協調控制的再生制動控制策略仿真模型嵌入到Advisor(advanced vehicle simulator)的控制策略仿真模塊中,得到HEV整車仿真模型如圖6所示。
5.2 基于循環工況的實例HEV仿真
實例HEV樣車是全承載式傳統燃油城市公交車改裝而成,其主要參數如表2所示。

表2 實例HEV的主要技術參數
利用HEV整車仿真模型(圖6),輸入各部件的參數值(見表2),在中國典型城市循環工況下進行實例HEV樣車仿真,仿真結果主要參數變化如圖7所示,主要性能指標仿真值如表3所示。
仿真結果表明:

表3 實例HEV仿真和道路試驗結果
(1) 在運行過程中動力電池SOC值在0.63~0.72的較小范圍波動,確保了動力電池在較高效率區內工作;
(2) 對發動機輸出功率范圍限制在效率較高的區間(40~80kW)內;
(3) 電機輸出功率跟隨循環工況的需求功率變化而變化,電機輸出功率大于零時為驅動狀態,小于零時為再生制動狀態。
(4) 所設計的基于混雜自動機模型的HEV動力系統模式變換式驅動控制策略和制動力協調控制的再生制動控制策略能夠較好地實現HEV不同運行狀態的切換,并確保發動機和動力電池在高效率區工作。
5.3 實例HEV性能道路試驗
根據相關試驗標準,應用汽車綜合試驗儀、功率分析儀和信號處理系統等測試儀器進行實例HEV道路性能試驗[10],并將主要性能指標的試驗值與仿真值進行比較,見表3。結果表明:
(1) 實例HEV樣車的動力性和經濟性均能滿足設計要求,最高車速、0-50km/h起步加速時間、最大爬坡度和典型城市循環工況等效燃料消耗量的仿真值和道路試驗值誤差均小于3%,驗證了在Simulink/Stateflow和Advisor平臺上所建立的HEV整車仿真模型的準確性;
(2) 實例HEV樣車的循環工況100km等效燃料消耗量為24.3L,比同類型傳統燃油城市公交車100km燃油消耗量(28.9L)減少了15.9%,驗證了所設計的HEV動力系統的模式變換式驅動控制策略和制動力協調控制的再生制動控制策略的有效性和可行性。
6 結論
(1) 基于混雜動態系統理論進行HEV動力系統分析,建立了基于混雜自動機模型的HEV動力系統控制模型;在此基礎上設計了一種集恒溫器式和功率跟隨式控制策略優點的模式變換式驅動控制策略及制動力協調控制的再生制動控制策略,并應用于實例HEV樣車動力系統控制中。
(2) 采用Simulink/Stateflow的混合建模方法,建立了基于混雜自動機模型的HEV動力系統的模式變換式驅動控制策略和制動力協調控制的再生制動控制策略的仿真模型,并建立了基于Simulink/Stateflow和Advisor平臺的HEV整車仿真模型。
(3) 在Simulink/Stateflow和Advisor平臺上,對實例的HEV的整車動力性和經濟性進行仿真,并與道路試驗進行比較。結果表明:實例的HEV樣車在滿足動力性能指標要求的情況下,與同類型傳統燃油汽車的燃料消耗量相比減少15.9%,同時驗證了基于混雜系統理論的HEV動力系統驅動和制動控制的可行性,為新能源汽車動力系統控制和分析提供了一種新的方法。
[1] 陳全世,等.先進電動汽車技術[M].北京:化學工業出版社,2007:22-40.
[2] 鄒明能.混合動態系統控制綜合方法研究[D].天津:天津大學,2003.
[3] Zhu Yuan, Chen Yaobin. A Four-Step Method to Design an Energy Management Strategy for Hybrid Vehicle[C]. Proceeding of the 2004 American Control Conference,2004:156-161.
[4] 李炯,張承寧.基于混雜系統理論的電動汽車能量管理策略[J].系統仿真學報,2006,18(10):2932-2935.
[5] Alur R, Courcoubetis C, Henzinger T. Hybrid Automata: An Algorithm Approach to the Specification and Verification of Hybrid Systems[J]. Hybrid Systems, Lecture Notes in Computer Science,1993(736):209-229.
[6] 薛樂,廖沫,魏晨,等.混合系統及其建模[J].系統仿真學報,2004,16(3):375-380.
[7] 尹安東.基于混合系統理論的混合動力客車控制策略研究[D].合肥:合肥工業大學,2010.
[8] 余志生.汽車理論(第3版)[M].北京:機械工業出版社,2003.
[9] 尹安東,趙韓,張炳力.微型電動轎車制動能量回收及控制策略的研究[J].合肥工業大學學報(自然科學版),2008,31(11):1760-1763.
[10] 張俊智,陸欣,張鵬君,等.混合動力城市客車制動能量回收系統道路試驗[J].機械工程學報,2009,45(2):25-30.
A Study on the Driving and Braking Controls forHybrid Electric Vehicle Based on Hybrid System Theory
Yin Andong1,2, Zhao Han1,2, Sun Jun1,2& Lu Ruigang3
1.SchoolofMachineryandAutomobileEngineering,HefeiUniversityofTechnology,Hefei230009;2.NationandLocalUnionResearchCenterforAutomotiveTechnology&EquipmentEngineering,Hefei230009;3.SocietyofAutomotiveEngineersofChina,Beijing100055
Based on hybrid system theory, the powertrain system of a hybrid electric vehicle (HEV) with rear wheel drive is analyzed, a control model for HEV powertrain system is built based on hybrid automaton model, and a mode-switch-based drive control strategy and a regenerative braking control strategy with braking force coordination control are proposed. Then a simulation model for HEV powertrain control strategy is set up with Simulink/Stateflow hybrid modeling method, and both performance simulation and road test on a real sample HEV are conducted. The results show that the performance of real sample HEV meets the design requirements with its fuel consumption 15.9% less than the traditional vehicle of same category under the typical urban driving cycles in China.
HEV; hybrid system theory; powertrain system; regenerative braking; control strategy
*國家科技支撐計劃項目(2013BAG08B01)和國家新能源汽車產業技術創新工程項目(財建[2012]1095號)資助。
原稿收到日期為2015年7月2日,修改稿收到日期為2015年8月5日。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
能源工程(2020年6期)2021-01-26 00:55:22
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
光學精密工程(2016年6期)2016-11-07 09:07:19
通信電源技術(2016年1期)2016-04-16 04:57:26
汽車與新動力(2015年1期)2015-02-27 12:11:01