一種新的矢量傳感器線列陣波束形成算法*
2015-04-01 12:18:46李海濤李智忠宋志杰
傳感器與微系統 2015年10期
關鍵詞:信號
李海濤,李智忠,宋志杰,王 良
(1.海軍潛艇學院,山東 青島266042;2.中國海洋大學,山東 青島266003)
0 引 言
近年來,關于聲矢量傳感器陣列到達方位(DOA)估計方面取得了很多成果[1~3],為了提高方位分辨力,Hawkes M研究了聲矢量傳感器陣列最小方差無畸變響應(minimum variance distortionless response,MVDR)方法關于目標方位估計的漸進性能[4];孫貴青等人研究了聲矢量傳感器陣列的寬帶MVDR 波束形成,處理中將寬帶分成若干頻點,在每個頻點上估計空間譜,相加得到寬帶結果,需要不少于陣元數的快拍數才能達到收斂,要求信號有較長的平穩時間,這給實際應用帶來了一定的限制。田坦等人[5]針對矢量水聽器陣MVDR 波束形成算法運算量大的問題,提出了一種基于波束域的改進算法:波束域MVDR,該方法將陣元空間數據轉換到波束空間,在波束域空間構建協方差矩陣,通過降維處理減小了對快拍數的要求,但仍需要一定的快拍次數。在傳統的聲壓陣處理方法中,文獻[6]提出了一種基于時域解析信號實現MVDR 的方法,稱為TAMVDR 算法,該算法在構造時域解析信號的基礎上,對每一路時域解析信號引入復權,利用期望方向的輸出相應不變的約束使陣列輸出功率最小而獲得權向量的最優解。利用TAMVDR,可在單次快拍下獲得穩定優化解,信號檢測和方位分辨性能較優。相對于其他算法需要很多快拍數據才能收斂而言,該算法相對降低了對條件的依賴,同時運算量相對較小。
基于以上分析,本文將TAMVDR 算法引入到矢量陣,將該算法的優點與矢量線列陣系統優越性結合在一起,來提高對目標分辨和探測能力,即VTAMVDR 算法,并將其與頻域MVDR 和常規波束形成進行對比研究。
1 VTAMVDR 的原理
VTAMVDR 的基本思想是應用TAMVDR 的理念將接收到的聲壓振速時域實數信號通過Hilbert 變換構造出復數形式的解析信號,然后將p+vc相加,再利用線性約束條件使陣列輸出功率最小的準則確定復數形式的最優權向量,從而獲得來波方向的波束輸出功率。圖1 是給出了VTAMVDR 算法示意圖。
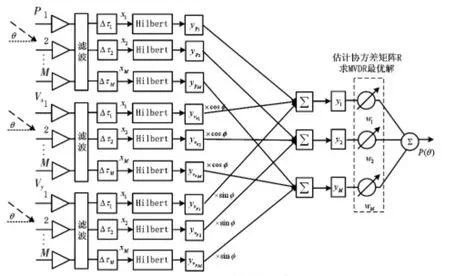
圖1 VTAMVDR 算法示意圖Fig 1 Diagram of VTAMVDR algorithm
M 只矢量傳感器均勻布放在x 軸上,矢量傳感器的方向與x 軸正方向一致,陣元間距d,記M 只矢量傳感器p,vx,vy號經時延Δτi(1≤i≤M)和濾波之后的輸入信號分別為

式中 Sp,Sx,Sy為期望目標信號矢量,Vp,Vx,Vy為陣列加性各向同性噪聲矢量與干擾之和。
利用Hilbert 變換H(·)構造時域復數信號為

聲壓與振速求和得到

矢量陣列自適應輸出功率為

式中 R=E{YYH}為基陣輸出的協方差矩陣。一般情況下,協方差矩陣是由一次快拍時間內的數據估計得到,即

在波束形成的輸出功率中,信號源的能量不僅在來波方向上有貢獻,而且對波束寬度內的其他方向也有不同程度的貢獻。MVDR 波束形成方法是在保持來波方向信號能量不變的前提下,使得信號源能量對波束寬度內的其他方向最小化,這實際上是一個約束最佳化的問題求解,可以表達為[7]

式中 α(θ)為指定來波方向的方向矢量。對經過濾波器和時延之后的數據處理時,信號已經消除陣元掃描角度帶來的影響,因此,有

式中 I 實際上是矢量加法器,以此可以計算最優權向量和VTAMVDR 輸出功率。
通過對約束條件的求解可得出VTAMVDR 波束形成器的最優權向量為

其輸出功率為

2 VTAMVDR 與頻域MVDR 對比
3 數值仿真與海上試驗數據分析
3.1 仿真實驗
仿真用的矢量傳感器線陣沿x 軸以陣元間距為d=λ/2 分布,共16 個。假定各個陣元接收到的噪聲為球面各向同性的高斯背景噪聲。假定存在一寬帶聲源,水平方位角初始角度為90°,方位變化率為0.25°/s,信號與噪聲相互獨立,各個陣元間的噪聲也互不相關,信噪比為3 dB。
圖2 給出了VTAMVDR 與頻域MVDR 波束輸出的對比,可以看出:VTAMVDR 的處理結果明顯優于頻域MVDR:頻域MVDR 得到的-3 dB波束寬度為4.7°,VTMVDR 得到的-3 dB 波束寬度為3.2°,VTMVDR 算法主瓣更尖銳并且旁瓣更低。VTAMVDR 方位估計無明顯偏差,頻域MVDR 方位估計偏差約3°,VTAMVDR 的處理增益較頻域MVDR 高約1.5dB,分析其原因為目標運動方位變化較快,期望信號隨時間發生了較大變化。
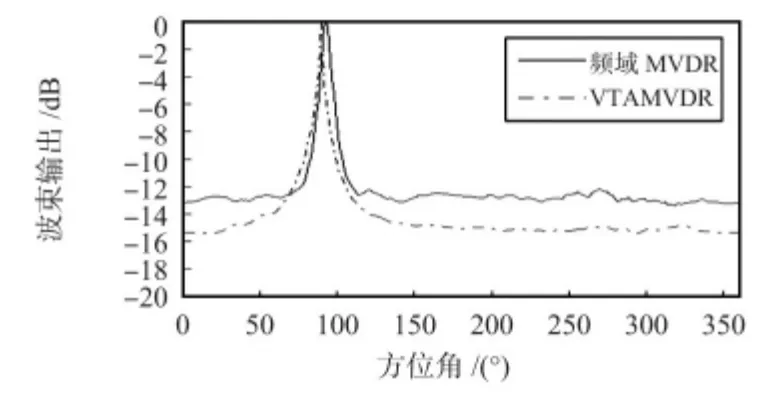
圖2 仿真數據VTAMVDR 與頻域MVDR 波束輸出對比Fig 2 Comparison of beam output of simulation data VTMVDR and frequency-domain MVDR
3.2 海上試驗數據處理
為了深入驗證算法性能,尤其是針對海上實際數據的處理能力,采用海上實錄數據對本算法進行處理驗證。試驗數據為16 陣元均勻二維矢量線陣輸出數據,數據總時間長度為400 s,數據每次處理的點數,即一次快拍長度為2 048 點。為了驗證算法的波束分辨能力,本節分別采用常規波束形成(conventional beamforming,CBF)、頻域MVDR和VTAMVDR 三種算法進行對比。在數據進行處理時,VTMVDR 與CBF 選用數據長度為1 次快拍,頻域MVDR 選用數據長度為48 次快拍。所得結果如圖3、圖4 所示。
圖3 為CBF 與頻域MVDR 的波束輸出對比,圖4 為頻域MVDR 與VTAMVDR 的波束輸出對比。可以看出:VTAMVDR 比CBF 和頻域MVDR 具有更高的左右舷模糊抑制增益和更低的旁瓣,VTAMVDR 算法性能優于頻域MVDR 和CBF,具有更好的分辨能力和探測性能,并且大大減少了所需快拍數,降低了計算量。
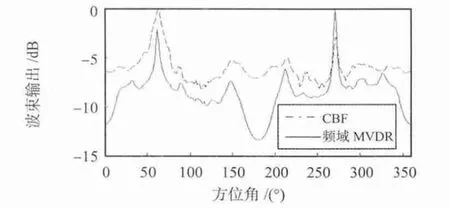
圖3 海試數據CBF 與頻域MVDR 波束輸出對比Fig 3 Comparison of beam output of CBF and frequency-domain MVDR with sea trial data
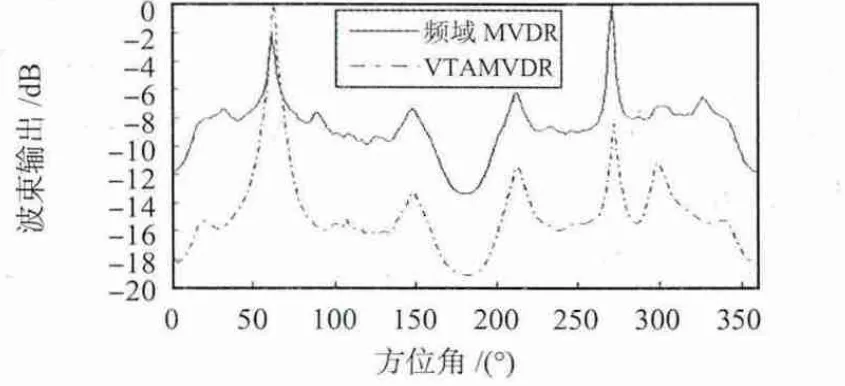
圖4 海試數據VTAMVDR 與頻域MVDR 波束輸出對比Fig 4 Comparison of beam output of VTAMVDR and frequency-domain MVDR with sea trial data
為了考核算法對強相關噪聲的抑制能力,選取所有時間段數據進行處理形成歷程圖。采用CBF、頻域MVDR 和VTAMVDR 三種算法進行對比。
圖5 為試驗數據處理得到的時間歷程圖,圖中展示了CBF、頻域MVDR 以及VTAMVDR 的處理結果。從圖中的對比可以看出:VTAMVDR 和頻域MVDR 的處理效果明顯優于CBF,而由于頻域MVDR 所需快拍數較多,在100 ~150 s 之間,250°方位角有一瞬態信號,影響了頻域MVDR輸出結果。而采用單次快拍的CBF 和VTAMVDR 影響較小,可以準確地反映瞬態信號的特點。

圖5 海上試驗數據時間歷程圖Fig 5 Time history of sea trial data
4 結 論
本文將TAMVDR 算法引入到了矢量線列陣信號處理中,提出了實現矢量線列陣波束形成的VTAMVDR 算法。通過仿真和海上試驗數據對常規波束形成、頻域MVDR 以及VTAMVDR 進行了對比分析,結果表明:VTMVDR 算法相比于常規波束形成和頻域MVDR 算法具有較好的性能,具有更高的分辨率和更窄的波束寬度,本算法可以更好地抑制噪聲,在數據長度滿足條件時,一般只需要一次快拍,并且不需要進行子帶分解,減小了計算量。當陣元個數較多時,能大大減小運算量,方便使用DSP 實現矢量傳感器陣列的工程化應用。
[1] Sun G,Yang D,Zhang L.Maximum likelihood ratio detection and maximum likelihood DOA estimation on the vector hydrophone[J].Acta Acustica,2003,28(1):66-72.
[2] Wong K T,Zoltowski M D.Closed-form underwater acoustic direction-finding with arbitrarily spaced vector hydrophones at unknown locations[J].IEEE J Oceanic Eng,1997,22(3):566-575.
[3] Wong K T,Zoltowaki M D.Root-MUSIC-based azimuth-elevation angle-of-arrival estimation with uniformly spaced butarbitrarily oriented velocity hydrophones[J].IEEE Trans on Signal Process,1999,47(12):3250-3260.
[4] Hawkes M,Nehorai A.Acoustic vector-sensor beamforming and Capon direction estimation[J].IEEE Trans on Signal Process,1998,46(9):2291-2304.
[5] 田 坦,齊 娜,孫大軍.矢量水聽器陣波束域MVDR 方法研究[J].哈爾濱工程大學學報,2004,25(3):295-298.
[6] 王 良,宋志杰,華 洋.時域解析信號的MVDR 自適應波束形成方法[J].數據采集與處理,2009,24(3):318-322.
[7] 游 鴻,黃建國.基于MVDR 的寬帶水下被動聲自導系統遠程目標檢測方法[J].兵工學報,2009,30(2):160-164.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
