基于GPS/GIS車輛行駛安全預警研究
2015-03-30 03:36:18張偉朋楊志強賀凱盈
測繪通報 2015年1期
關鍵詞:駕駛員
張偉朋,楊志強,賀凱盈
(長安大學測繪與空間信息研究所,陜西 西安710064)
一、引 言
當今科技發展迅速,行車安全問題很突出,近兩年無人駕駛技術被廣泛關注,但是由于安全、法則等種種原因使之不能很好地被推廣。由于很多地區道路設計受到惡劣地形條件的限制,道路環境很差,很多都達不到標準,甚至成為所謂的死亡路段。研究行車安全預警對駕駛員的行車安全及無人自動駕駛系統都有很現實的意義。
二、行駛車速作為預警研究參數的確定
車速是車輛在公路上行駛時對道路線形最直觀的反映,是道路線形和駕駛員主觀期望共同作用的結果,也可以說是交通環境和駕駛員主觀心理等各種因素的綜合產物。在公路線形設計階段和運營階段,車速都扮演著重要角色,是聯系兩個階段的橋梁[2]。由于線形條件對行駛車輛最直接的影響表現在實際車速上,因而用行駛車速作為道路線形安全預警研究指標具有一定的可靠性。另外,在車輛行駛時,通過受力分析來確定車輛在道路上的穩定狀態都是離不開車速所產生的影響,這就使得行駛車速作為預警參數更加肯定。
1.平曲線段車輛橫向穩定性約束條件
車輛在公路平曲線段行駛時,橫向穩定性問題主要是橫向滑移和橫向傾覆。由于現代汽車在設計時一般輪距較寬、重心較低,車輛在曲線上行駛時,在發生橫向傾覆之前先產生橫向滑移現象。在通常情況下,只要滿足橫向滑移穩定條件,傾覆穩定條件也能滿足,除非車體很高而輪距較小,離心力所產生的橫向力矩達到傾覆力矩。為了保證平曲線段車輛穩定性,只需將車轉彎時抗滑移穩定性條件得出的安全速度臨界值作為車輛橫向穩定性約束條件[3]。
平曲線段,由于離心力的存在,車輛的受力情況比較復雜(如圖1所示),可得超高方向上保持車輛橫向穩定性的約束條件為

式中,fH、θ、R、m、g分別為路面橫向摩擦系數、橫向傾角(超高坡度)、平曲線半徑、汽車質量和重力加速度;符號分別對應正常超高與反超高兩種情況。
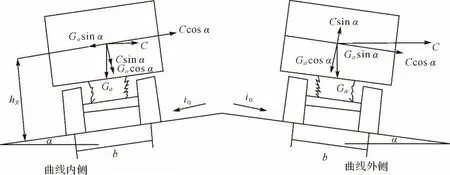
圖1 汽車在曲線上行駛所產生的橫向作用力
根據式(1),可得到下式

式中,υ是以m/s作為單位的,將其化為以km/h作為單位,則上式化為

式(3)等號表示半徑R、超高橫坡坡度ic、路面橫向摩擦系數fH與臨界側滑速度υ的關系。
2.路面摩擦系數的確定
溫度和濕度的變化是使路面狀態及摩擦性能發生明顯變化的因素。受雨雪霧天氣及貨車制動灑水影響時,道路表面可能產生水、雪、冰等覆蓋物,形成潮濕、積水、積雪、結冰等不同的路面狀態。根據試驗調查與經驗總結,可將路面狀況分為6種類型,其路面摩擦系數的確定方法見表1,縱向摩擦系數取fL=(0.7-0.8)f,橫向摩擦系數取fH=(0.6-0.7)f[4]。
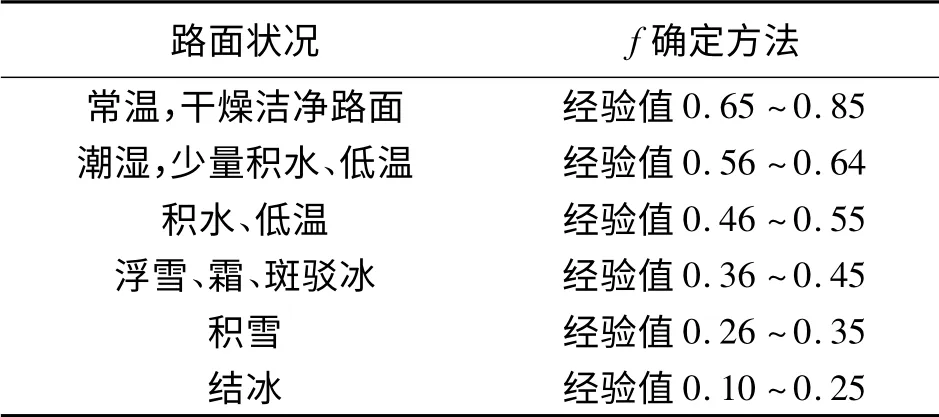
表1 不同路面狀況下路面摩擦系數的確定
3.汽車速度約束條件確定
圖1為汽車在曲線上行駛所產生的橫向作用力,橫向力Y為

通常α角很小,因此cosα≈1,sinα=tanα=io
式中,“+”表示路拱雙坡外側;“—”表示路拱雙坡內側;α為路拱橫坡坡角,一般很小;io為路面橫坡坡度;C為離心力,其計算公式為

因此

因此


由上式可知,R、v值不取決于Y的絕對值,而取決于Y/Ga,即取決于單位重量的相對橫向力值。取μ=Y/Ga稱為橫向力系數,帶入式(8),得
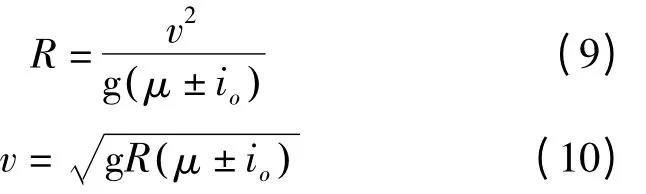
在道路上行駛的汽車,當其位于一段曲線上的某一個點時,其超高橫坡度、曲線的半徑是確定的,根據u值與乘車人感覺及耗油,μ值取0.15,此處υ是以m/s作為單位的,將其化為V以km/h作為單位,則式(10)變形得汽車的極限行車速度為

式中,R為曲線半徑,單位m;μ為橫向力系數;io為超高橫坡度。
三、系統總體設計
本系統是希望在車輛行駛過程中,首先要將道路劃分成不同的線形類型。在駕駛員的角度,根據道路的線形設計以實際速度為依據,與根據道路各項參數所確定的危險速度做比較,對駕駛員進行實時提醒警告,以便使其安全行駛。其總體設計過程如圖2所示。
導航定位系統主要有GPS導航技術、慣性導航技術、軌跡推算技術定位等。數據采集及數據庫建立主要依賴于成熟的GIS技術。目前主要的GIS產品均提供GPS接受功能,可直接通過GPS設備獲取坐標信息并顯示在地圖上,并具有數據分析、數據管理、地圖投影、數據發布的能力[6]。
系統先通過GPS導航系統將車輛當前所在的位置,然后通過坐標轉換將GPS采集的坐標與道路坐標相統一。在GIS系統中匹配所在道路的線形信息,從而確定道路在此處的參數(數據采集系統獲得),然后根據GPS測得的速度進行行車安全分析。當發現可能接下來會發生危險,馬上報警,并提醒駕駛員(或者車輛自動駕駛系統)應該怎么操作[7]。
四、行車安全分析系統具體內容
此處的設計是將當前實測速度與根據道路參數等計算的最大側滑速度與道路設計中的考慮駕駛員心理的速度進行比較,從而做出預警。當實測速度v>側滑速度v2時,就發出警報,并提醒趕緊減速;當實測速度v1>考慮駕駛員心理的速度v3時,提醒駕駛員減速,以便平穩舒適行駛[5]。程序設計執行過程如圖3所示。
五、結束語
道路線形安全主要與道路線形、人、環境等有關系,而道路線形的設計主要考慮車速影響。本文是在參讀很多資料后對判斷道路線形安全影響的參數進行最后確定,很明顯車輛行駛速度是最直接和最可靠的標準。在道路設計中有很多的速度概念以確保道路設計的合理性,而本文就是將車輛的實際行駛速度作為判斷量,并且對車輛進行受力分析,得出基于實際車速來預警的模型。
車輛行駛安全包含了很多方面的因素和內容,本文所述將GPS定位導航與GIS系統結合對車輛速度、道路線形等進行研究的基礎上進行的初步設計。要達到很好的效果,必然要與車輛生產技術、動力學、交通工程、人體視覺以及心理學聯合研究。希望以后在各研究領域的學者在各學科融合的基礎上能夠有更深入的研究。
[1] 丁玲.公路線形設計與行車安全的關系[J].交通世界:運輸,2011(5):126-127.
[2] 高建平,郭忠印.基于運行車速的公路線形設計質量評價[J].同濟大學學報:自然科學版,2004,32(7):906-911.DOI:10.3321/j.issn:0253-374X.2004.07.014.
[3] 劉丹.基于GIS的道路交通安全評價與預測方法研究[D].北京:北京交通大學,2012.
[4] 楊梅.公路線形因素對交通安全的影響分析[D].西安:長安大學,2009.
[5] 林志英.道路線形條件對交通安全的影響分析[D].長沙:中南大學,2010.
[6] 黃文卿.基于可能速度的路線線形設計質量評價研究[D].武漢:武漢理工大學,2008.
[7] 翟戰強,蔡少華.基于GPRS/GPS/GIS的車輛導航與監控系統[J].測繪通報,2004(2):34-36.
[8] 馬俊海,黃明.車輛監控系統中GPS,GIS,GSM的應用[J].測繪通報,2002(10):34-36.
[9] 趙琳琳.道路線形安全評價方法研究及應用[D].昆明:昆明理工大學,2012.
[10] 郭鳳香.道路線形安全分析與評價[D].昆明:昆明理工大學,2005.
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年7期)2022-04-20 11:44:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
活力(2019年22期)2019-03-16 12:46:58
汽車電器(2018年1期)2018-06-05 01:22:54
紅土地(2016年6期)2017-01-15 13:45:55
汽車與安全(2016年5期)2016-12-01 05:22:10
公民與法治(2016年4期)2016-05-17 04:09:26
城市道橋與防洪(2014年7期)2014-02-27 07:28:09
解放軍生活(2013年5期)2013-04-29 21:51:50
