資源三號(hào)衛(wèi)星全色與多光譜影像融合方法
2016-01-26 01:49:36黃先德
測(cè)繪通報(bào) 2015年1期
關(guān)鍵詞:分類評(píng)價(jià)
黃先德,周 群,王 興
(重慶郵電大學(xué)通信學(xué)院,重慶400065)
Fusion of Resources Satellite-3 Remote Sensing Panchromatic and
Multispectral Images
HUANG Xiande,ZHOU Qun,WANG Xing
?
資源三號(hào)衛(wèi)星全色與多光譜影像融合方法
黃先德,周群,王興
(重慶郵電大學(xué)通信學(xué)院,重慶400065)
Fusion of Resources Satellite-3 Remote Sensing Panchromatic and
Multispectral Images
HUANG Xiande,ZHOU Qun,WANG Xing
摘要:在處理新型高分辨率遙感衛(wèi)星影像時(shí),傳統(tǒng)的像素級(jí)融合方法會(huì)引起綠色植被區(qū)域較大的光譜扭曲。本文提出一種適合資源三號(hào)衛(wèi)星影像的融合新方法,可以很好地解決此問(wèn)題。首先對(duì)全色圖像進(jìn)行低通濾波并下采樣得到退化后的圖像HP,利用回歸方法建立多光譜影像與圖像HP的方程求解回歸系數(shù),考慮到綠色植被顏色失真嚴(yán)重,采用NDVI進(jìn)行分類,分別求取綠地和非綠地的回歸系數(shù)進(jìn)行分類融合。試驗(yàn)結(jié)果證明,該方法在提高多光譜影像分辨率的同時(shí),盡可能多地保持了光譜信息,特別是綠色植被區(qū)域,融合效果要好于其他方法。
關(guān)鍵詞:遙感影像融合;資源三號(hào);線性回歸;分類;評(píng)價(jià)
一、引言
遙感是一種快速、準(zhǔn)確、遠(yuǎn)距離獲取大面積地物的現(xiàn)代信息技術(shù),是智慧城市建設(shè)和地理國(guó)情普查的重要手段,是政府及相關(guān)單位準(zhǔn)確掌握城市發(fā)展過(guò)程中各種相關(guān)信息變化的重要工具。很多國(guó)家都積極開(kāi)展遙感衛(wèi)星的研制及發(fā)射工作,目前已發(fā)射的遙感衛(wèi)星有:美國(guó)的GeoEye系列衛(wèi)星和World View系列衛(wèi)星,法國(guó)的SPOT系列衛(wèi)星和Pleiades系列衛(wèi)星,德國(guó)的RapidEye衛(wèi)星,日本的ALOS系列衛(wèi)星,印度的Cartosat系列衛(wèi)星,中國(guó)的資源一號(hào)、二號(hào)、三號(hào)衛(wèi)星以及遙感1號(hào)—遙感16號(hào)系列衛(wèi)星等。大多數(shù)的地球遙感衛(wèi)星并不能直接呈現(xiàn)出高分辨率多光譜影像,而是只能同時(shí)搭載低分辨率多光譜(multispectral, MS)影像和高分辨率全色(panchromatic, PAN)影像。
資源三號(hào)(ZY-3)測(cè)繪衛(wèi)星是我國(guó)首顆民用高分辨率光學(xué)傳輸型立體測(cè)圖衛(wèi)星[1],兼具遙感測(cè)量和地貌資源調(diào)查功能。資源三號(hào)衛(wèi)星可以同時(shí)搭載2.1 m分辨率的全色傳感器和5.8 m分辨率的多光譜傳感器,可以提供非常豐富的三維幾何信息,將實(shí)時(shí)遙感影像各種數(shù)據(jù)傳回地球。作為目前國(guó)內(nèi)最新發(fā)射的遙感影像衛(wèi)星,相比國(guó)內(nèi)其他遙感衛(wèi)星,資源三號(hào)遙感衛(wèi)星在影像的分辨率和圖像的精度方面都有著明顯的優(yōu)勢(shì)。相比于國(guó)外其他衛(wèi)星,雖然在分辨率方面還有一定的差距,綜合市場(chǎng)價(jià)格等因素,仍然具有重要的研究?jī)r(jià)值。表1為資源三號(hào)衛(wèi)星傳感器所搭載的波段參數(shù)。遙感影像融合需要將低空間分辨率的多光譜影像與高空間分辨率的全色影像進(jìn)行融合,獲得同時(shí)具有豐富的光譜信息和高空間分辨率的融合影像。
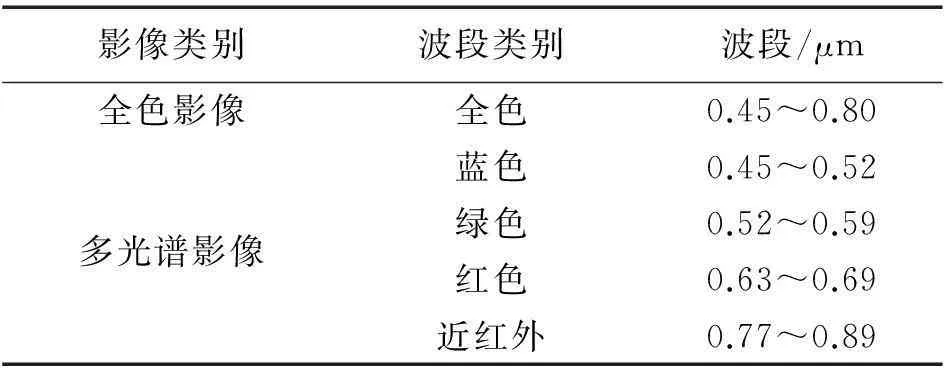
表1 資源三號(hào)衛(wèi)星傳感器影像類別和波段參數(shù)
圖像融合按照研究對(duì)象可以分為3類,從低層次到高層次依次是像素級(jí)融合(pixel-level)、特征級(jí)融合(feature-level)和決策級(jí)融合(decision-level)。像素級(jí)融合保留了較多的原始圖像信息,目前研究的重點(diǎn)主要集中在像素級(jí)融合,其常用方法包括IHS變換法、PCA變換法、Brovey變換法。這些方法對(duì)SPOT的全色影像與低分辨率的 Landsat TM的多光譜影像融合具有非常好的效果,不僅清晰度高,而且色彩還原度也非常好。但是對(duì)于之后發(fā)射的超高型遙感影像衛(wèi)星,如IKONOS、QuickBird的全色影像與多光譜影像的融合,顏色失真非常明顯。通過(guò)對(duì)傳統(tǒng)融合方法的分析, Zhang得出了新型高分辨力遙感圖像失真的原因,由于全色影像的波段在新型傳感器中發(fā)生了變化,已從可見(jiàn)光波段擴(kuò)展到近紅外波段,全色影像的光譜范圍要大于多光譜影像的光譜范圍[2]。
IKONOS、QuickBird 等影像在 IHS 變換融合法下進(jìn)行融合時(shí)會(huì)產(chǎn)生失真,主要原因是影像的全色波段與構(gòu)建的強(qiáng)度分量 I 之間的差異過(guò)大,直接用這樣的全色波段來(lái)替換強(qiáng)度分量 I易造成顏色失真。Tu等在構(gòu)建 IKONOS 的低分辨率全色影像時(shí)通過(guò)加入近紅外波段,使得高分辨率全色影像與低分辨率全色影像的相關(guān)系數(shù)得到了提高,提出了廣義快速的 IHS 變換融合法(GIHS)[3]。傳統(tǒng)IHS 變換法只能進(jìn)行三波段融合,而GIHS 變換融合法對(duì)此進(jìn)行了改進(jìn),從三波段擴(kuò)展到多波段融合,融合效果有一定的提升,但是光譜失真效果依然存在。在像素級(jí)影像融合統(tǒng)一框架確定的條件下[4],仍然存在著對(duì) LRP的不準(zhǔn)確估計(jì)的問(wèn)題,想要準(zhǔn)確地獲取空間細(xì)節(jié)信息就變得非常不現(xiàn)實(shí)。因此解決影像失真的最好辦法是找到合適的LRP的構(gòu)建方式。
二、衛(wèi)星的光譜響應(yīng)特性
1. 遙感衛(wèi)星的光譜范圍
遙感影像衛(wèi)星中全色影像和多光譜影像的光譜覆蓋具有一定的重疊性。光譜覆蓋范圍的變化導(dǎo)致了光譜失真, 表2展示出了不同遙感衛(wèi)星全色影像和多光譜應(yīng)的光譜覆蓋。從表中可以看出,不同的遙感衛(wèi)星,全色影像覆蓋的多光譜影像波段各不一樣,Landsat7(ETM+)的全色波段只覆蓋了紅、綠、近紅外波段,并沒(méi)有覆蓋藍(lán)色波段。IKONOS衛(wèi)星和QuickBird衛(wèi)星的光譜范圍在所有衛(wèi)星中最廣,而且覆蓋了所有波段。SPOT 5等光譜覆蓋都有一定的局限性,并沒(méi)有全部覆蓋。ZY-3雖然光譜范圍只延伸到了0.80 μm,但是也覆蓋了所有波段。由于衛(wèi)星拍攝地球受太陽(yáng)光的影響,綠色植被往往比地形的反射率要高,導(dǎo)致拍攝的影像存在綠色植被顏色偏差的可能。
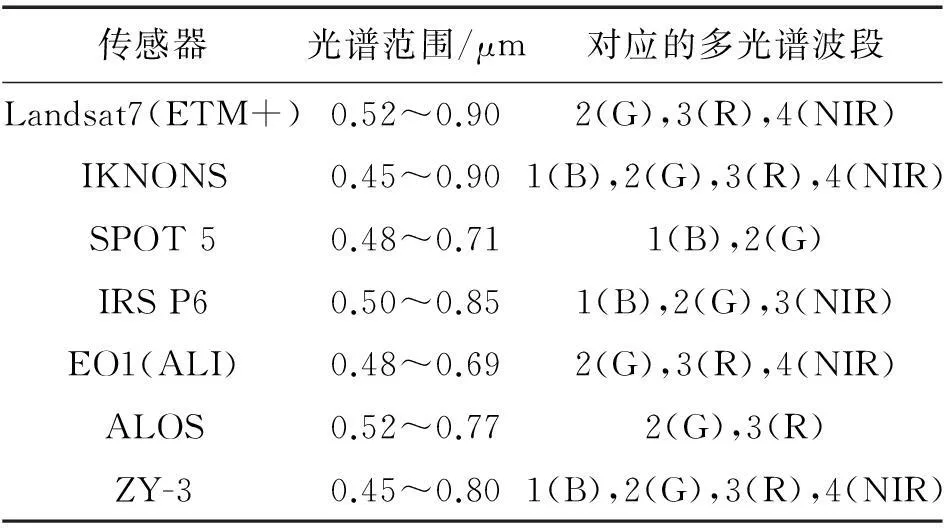
表2 全色傳感器的光譜范圍
2. 遙感衛(wèi)星的光譜響應(yīng)
遙感影像衛(wèi)星大多數(shù)都可以拍攝高分辨率全色影像和低分辨率多光譜影像。最理想的是全色影像的波段覆蓋范圍剛好與多光譜影像的覆蓋范圍完美重疊,而且多光譜影像各個(gè)波段恰好分開(kāi)不重疊(如圖1所示,以IKONOS為例),達(dá)到全色波段的輻射能量完全等于多光譜影像各個(gè)波段輻射能力的和。傳感器記錄的輻射能量是入瞳處的輻射能量與傳感器的光譜響應(yīng)共同作用的結(jié)果[5]。可實(shí)際情況如圖1(b)所示,全色影像的覆蓋范圍要大于多光譜影像的覆蓋范圍,而且多光譜影像的各個(gè)覆蓋范圍也沒(méi)有分離,而是相互重疊的。
Lk=∫L(λ)Rk(λ)dλ
(1)
式中,λ為波長(zhǎng);Lk為k波段記錄的輻射亮度值(inband radiance);L(λ)為入瞳處的輻射能量(atapeture spectral radiance);Rk(λ) 為波長(zhǎng)λ處的光譜響應(yīng)。資源三號(hào)衛(wèi)星的全色波段覆蓋了4個(gè)多光譜影像的波段,因此可以定義4個(gè)權(quán)值來(lái)估計(jì)全色波段的輻射值,即
Pan=wRR+wGG+wBB+wNIRNIR+other
(2)
式中,全色、紅、綠、藍(lán)、近紅外波段的輻射值分別對(duì)應(yīng)關(guān)系式中的Pan、R、G、B、NIR;wR、wG、wB、wNIR為各相應(yīng)波段的加權(quán)系數(shù);other 項(xiàng)主要是考慮到IKONOS衛(wèi)星的全色影像的波段覆蓋要比多光譜影像的波段覆蓋要廣,因此加上這一項(xiàng)。對(duì)上面公式加以總結(jié)歸納可得
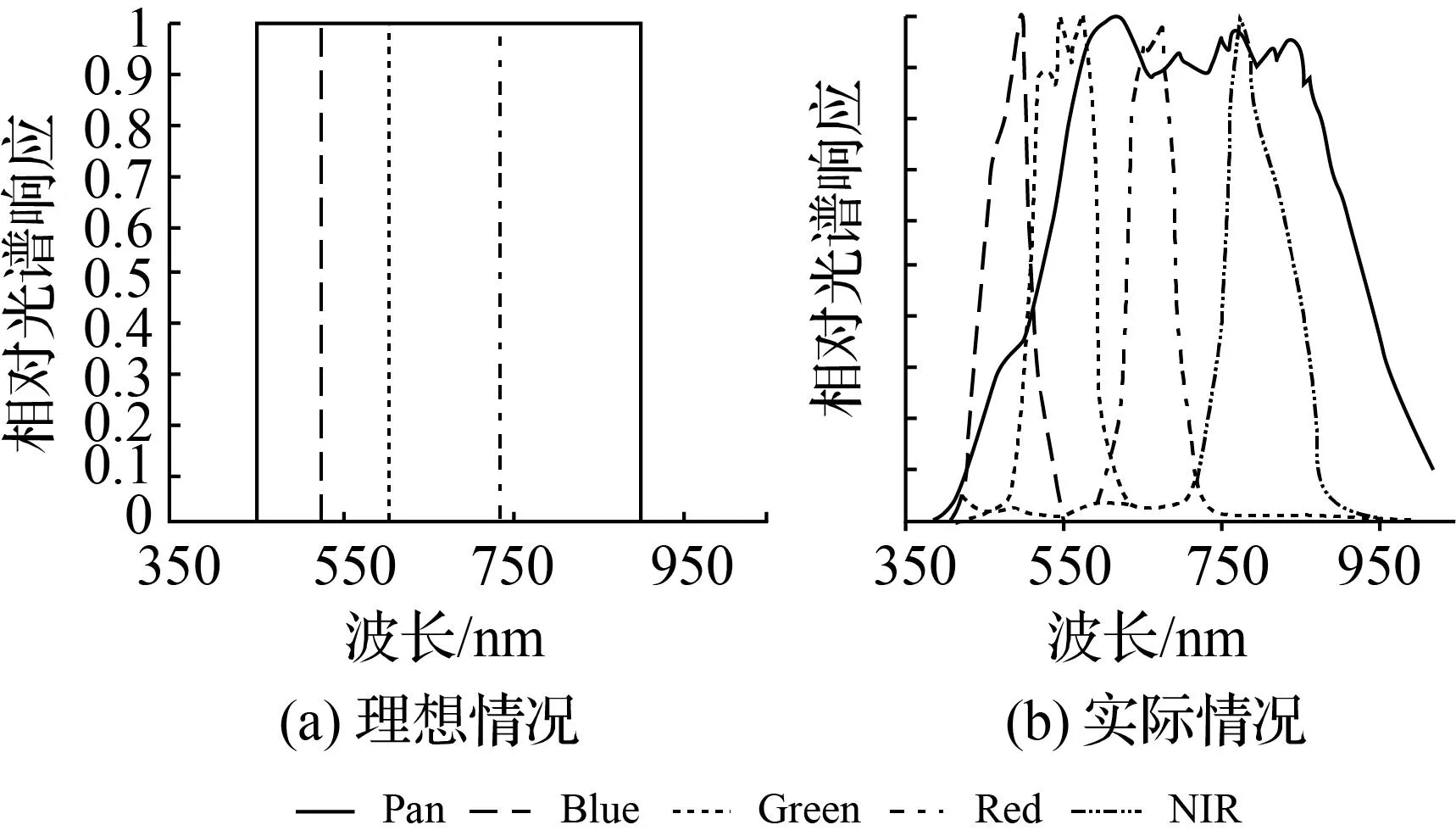
圖1 IKONOS衛(wèi)星的傳感器光譜響應(yīng)
(3)
式中,Pan表示為全色影像;MSi表示為多光譜影像,準(zhǔn)確地說(shuō)是被全色波段光譜范圍覆蓋下的多光譜波段;wi為對(duì)應(yīng)波段的加權(quán)系數(shù);other 項(xiàng)則主要是因?yàn)橐恍┬l(wèi)星的全色影像波段的覆蓋范圍要大于多光譜影像的覆蓋范圍 (如 IKONOS),所以需要加上此項(xiàng)[6]。
三、融合方法
1. 像素級(jí)遙感影像融合統(tǒng)一框架
Dou 將數(shù)學(xué)推導(dǎo)和物理假設(shè)分離,提出了像素級(jí)遙感影像融合統(tǒng)一理論模型[4]
HRM(i,j)=LRM(i,j)+W(i,j)δ(i,j)
(4)
δ(i,j)=HRP(i,j)-LRP(i,j)
(5)
式中,HRM(i, j)為融合的高分辨率多光譜影像記錄;(i, j)為圖像在這一點(diǎn)具體的記錄值;LRM(i, j)為重采樣后的低分辨力多光譜影像;W (i, j)為空間細(xì)節(jié)注入方式;δ(i,j)為提取出來(lái)的細(xì)節(jié)信息。空間細(xì)節(jié)信息通過(guò)式(5)來(lái)獲得,其中,HRP表示高分辨力的全色圖像;LRP表示低分辨力的全色圖像。從以上兩個(gè)公式可看出,影像融合的關(guān)鍵在于兩個(gè)方面:① 提取空間細(xì)節(jié)信息δ;② 注入的空間細(xì)節(jié)系數(shù)W。空間細(xì)節(jié)信息主要由高分辨率全色影像和低分辨率全色影像的差值決定,高分辨率全色影像已知,那么研究重點(diǎn)就是如何合理地構(gòu)造低分辨率全色影像LRP。LRP的構(gòu)建方法既可以從高分辨率全色影像降低分辨率獲取,也可以由多光譜影像線性合成。為了增加多光譜影像與全色影像的相關(guān)性,本文研究的重點(diǎn)是如何利用多光譜影像去構(gòu)造低分辨率全色影像LRP。
利用圖像之間的相關(guān)性擬合構(gòu)造LRP。目前W還沒(méi)有形成統(tǒng)一的定論,在式(4)中,W與δ相互獨(dú)立,因此取用GIHS變換的系數(shù){1,1,1,1}[7],方便與GIHS方法進(jìn)行比較。
2.LRP的構(gòu)造形式
根據(jù)上文介紹,低分辨率全色影像可以由多光譜影像經(jīng)過(guò)線性組合得到。低分辨率全色影像和高分辨率全色影像相差的是細(xì)節(jié)信息,利用其線性關(guān)系,可以得出
(6)
式中,MSi為參與擬合LRP的多光譜影像波段,或者說(shuō)被全色波段光譜范圍所覆蓋的多光譜影像波段;wi為相應(yīng)波段的加權(quán)系數(shù)。對(duì)于資源三號(hào)影像衛(wèi)星,i為1,2,3,4波段。本文研究的重點(diǎn)是加權(quán)系數(shù)wi,許多學(xué)者對(duì)此也都提出了自己的見(jiàn)解和看法。通過(guò)對(duì)多光譜傳感器的光譜響應(yīng)值與IKONOS 全色進(jìn)行線性回歸,Dou得到了適用于輻射值的加權(quán)系數(shù)w=[119 708 371180 105 230111 355 215113 615 748][8];依據(jù)多光譜傳感器與全色光譜響應(yīng)曲線覆蓋的面積,Boggione 等得到 Landsat ETM+各多光譜波段輻射值的加權(quán)系數(shù)w=[0. 250.230.52][9]。而光譜響應(yīng)函數(shù)(spectral response function, SRF)是完全理想狀態(tài)下測(cè)量出來(lái)的數(shù)值,在衛(wèi)星影像的圖像攝取過(guò)程中,會(huì)受到很多方面的影響,如大氣環(huán)境狀態(tài)、衛(wèi)星拍攝影像的角度、成像造成的誤差、影像包括波段的范圍等,實(shí)際環(huán)境與需要的理想環(huán)境存在很大差距,不能直接對(duì)影像進(jìn)行處理。因此根據(jù) SRF 得到的加權(quán)系數(shù)并不能對(duì)所有的影像處理都達(dá)到較好的效果,尤其是那些經(jīng)過(guò)光反射和氣候條件比較差的時(shí)候拍攝的影像。資源三號(hào)衛(wèi)星在成像過(guò)程中,需要考慮到對(duì)此有影響的傳感器調(diào)制傳遞函數(shù)(modulation transfer functions,MTF),應(yīng)該首先對(duì)Pan影像進(jìn)行5×5的高斯低通濾波,并將其下采樣退化到與MS影像相同的分辨力[10],然后根據(jù)式(6)對(duì)多光譜影像進(jìn)行線性回歸,利用最優(yōu)化理論得到參與融合波段的回歸系數(shù)。
3. 基于分類思想的LRP重構(gòu)
通過(guò)上文分析,低分辨率全色影像LRP可以由多光譜影像線性組成。由于衛(wèi)星影像在拍攝地面過(guò)程中,綠地的反射率要高于其他地貌,如果用統(tǒng)一的回歸方法對(duì)全體進(jìn)行處理,很難達(dá)到理想的效果。因此可以采取分類回歸的方法來(lái)分別求取回歸系數(shù),對(duì)不同的地面采取不同的方法求得各自的回歸系數(shù)。選用歸一化植被指數(shù)(normalized difference vegetation index,NDVI)來(lái)進(jìn)行圖像分類,即
NDVI=(p(nir)-p(red))/(p(nir)+p(red))
(7)
式中,NDVI的范圍為-1≤NDVI≤1,如果NDVI<0,表明影像中地面覆蓋主要為云、水、雪等;如果NDVI=0,表明影像中地面為巖石或裸地等,或者說(shuō)NIR和R近似值為1;如果NDVI>0,表明影像中地面主要覆蓋的為綠色植被,數(shù)值越大,表明覆蓋度越大。總體流程如圖2所示,其中,括號(hào)內(nèi)的數(shù)值表示影像分辨率的大小,m、n表示多光譜影像的分辨率;t表示全色影像與多光譜影像的分辨率之比;PAN表示原始全色影像;MS表示原始多光譜影像;HP表示進(jìn)行低通濾波并下采樣得到退化后的圖像。算法流程步驟如下:
1) 對(duì)全色圖像進(jìn)行高斯低通濾波處理,并下采樣得到與多光譜影像相同分辨率的圖像HP。
2) 對(duì)多光譜影像進(jìn)行分類回歸,采用NDVI方法分為兩類綠地和非綠地,當(dāng)NDVI>0時(shí)采用綠地的回歸系數(shù)wi1,當(dāng)NDVI≤0時(shí),采用非綠地的回歸系數(shù)wi2。
3) 對(duì)不同地貌的全色影像和多光譜影像進(jìn)行線性回歸,一共得到2組構(gòu)建LRP的回歸系數(shù)wi1和wi2。具體回歸方法為將多光譜影像作為回歸方程中的LRM,圖像HP作為回歸方程中的LRP,構(gòu)造線性回歸方程,求解回歸系數(shù)。
4) 對(duì)HRP和LRP進(jìn)行直方圖匹配,采取分類回歸方法,不方便直接匹配,選取經(jīng)典的GIHS方法用強(qiáng)度分量I=(R+G+B+NIR)/4進(jìn)行匹配。
5) 按照上述方法,根據(jù)式(6)求得低分辨率全色影像LRP。
6) 將第5)步得到的LRP用式(4)和式(5)進(jìn)行融合,得到融合圖像HRM。
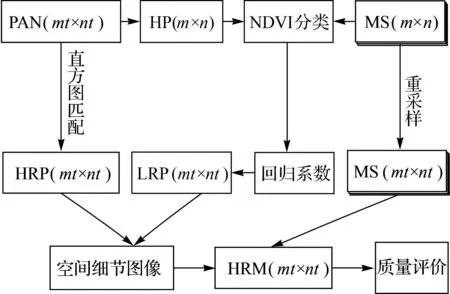
圖2 本文方法的流程
四、融合質(zhì)量評(píng)價(jià)
常用的評(píng)價(jià)方法主要包括兩種:主觀評(píng)價(jià)和客觀評(píng)價(jià)。
良好的評(píng)價(jià)應(yīng)該是客觀評(píng)價(jià)方法得到的結(jié)果與主觀評(píng)價(jià)方法得到的結(jié)果相一致或?qū)⒅鳌⒖陀^方法相結(jié)合進(jìn)行評(píng)定。試驗(yàn)中用到的客觀評(píng)價(jià)標(biāo)準(zhǔn)有相對(duì)平均光譜誤差(RASE)、相對(duì)全局維數(shù)綜合誤差(ERGAS),以及相關(guān)系數(shù)(CC)和空間相關(guān)系數(shù)(sCC)。
1) 相對(duì)平均光譜誤差(RASE)。其中,M為原始多光譜影像的N個(gè)光譜波段的平均輻射值。RMSE為均方誤差。
(8)
(9)
2) 相對(duì)全局維數(shù)綜合誤差(ERGAS)。
(10)
式中,h表示參與融合影像的高空間全色影像的分辨率;l表示參與融合影像的低分辨率光譜圖像的分辨率;N表示參與融合圖像的波段數(shù); Mi為每個(gè)光譜波段的平均輻射值。
3) 相關(guān)系數(shù)(CC)。R和F分別代表融合后的影像和原始多光譜影像。定義如下
Corr(R.F)=
(11)
4) 空間相關(guān)系數(shù)(sCC)[11]。先對(duì)融合影像與全色影像進(jìn)行高通濾波,選用的是拉普拉斯濾波器,接著計(jì)算濾波后的全色影像與融合影像所有波段的相關(guān)系數(shù)。
五、試驗(yàn)結(jié)果及評(píng)價(jià)
本文使用國(guó)內(nèi)資源三號(hào)衛(wèi)星影像提供的重慶地區(qū)數(shù)據(jù),圖像的獲取時(shí)間為2013年4月13日,全色影像和多光譜影像的分辨率分別為2.1m和5.8m,全色圖像大小為13 000像素×24 000像素,為了方便進(jìn)行處理,從中選取512像素×512像素的區(qū)域,在多光譜影像中選取同樣區(qū)域進(jìn)行融合。圖像區(qū)域內(nèi)包含了建筑、道路、綠地、植被等,如圖3和圖4所示。為了驗(yàn)證該方法的有效性,另外選取了幾種常用方法對(duì)試驗(yàn)圖像進(jìn)行了融合:①基于FIHS變換的融合方法;②基于GIHS變換的融合方法;③基于Brovey變換的融合方法。圖3和圖4為原始高分辨率全色影像和低分辨多光譜影像,圖5—圖7依次為FIHS方法、GIHS方法、Brovey變換方法處理的結(jié)果,圖8為本文采取分類擬合方法得到的結(jié)果。試驗(yàn)通過(guò)主觀評(píng)價(jià)和客觀評(píng)價(jià)對(duì)試驗(yàn)結(jié)果進(jìn)行分析,基于分類構(gòu)造LRP的回歸系數(shù)見(jiàn)表3。
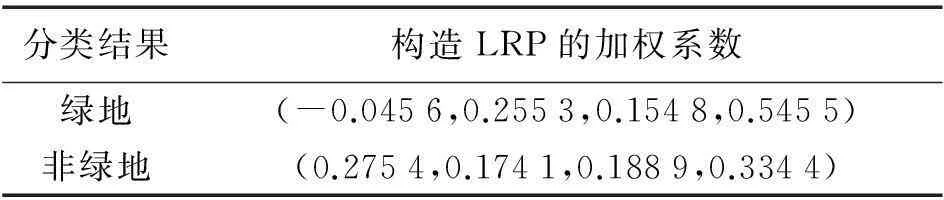
表3 資源三號(hào)衛(wèi)星分類結(jié)果計(jì)算機(jī)的LRP的加權(quán)系數(shù)
從視覺(jué)效果上可以看出,4 種融合方法獲得的影像空間分辨率有明顯的提高,更加清晰、更容易判讀。FIHS和GIHS兩種方法在空間信息增強(qiáng)方面效果都非常好,同樣也造成了光譜失真嚴(yán)重,特別是綠色植被覆蓋區(qū)域,顏色整體偏淡,而一些藍(lán)色建筑顏色偏深,也就是說(shuō)在保持光譜信息能力方面存在一定的缺陷。Brovey方法在顏色保持方面好于GIHS方法,兩者綠色植被區(qū)域均有提升,但Brovey方法在藍(lán)色建筑呈現(xiàn)方面顏色偏暗,失真嚴(yán)重,在清晰度方面遜色于GIHS方法。本文方法從目視效果來(lái)看綠色植被的還原度最高,整體顏色保持度較好,沒(méi)有明顯的失真現(xiàn)象,裸地和一些建筑方面也有提升,但是在藍(lán)色建筑方面與其他方法一樣,顏色偏暗。從清晰度來(lái)看同樣達(dá)到了良好的效果,具體比較要從客觀的評(píng)價(jià)指標(biāo)來(lái)評(píng)判。

圖3 原始全色圖像

圖4 原始多光譜圖像

圖5 FIHS方法圖
在試驗(yàn)中,選取近些年來(lái)使用較多的RASE、ERGAS、CC、sCC這4個(gè)參數(shù)來(lái)進(jìn)行對(duì)比分析。主要考察空間信息的增強(qiáng)能力及光譜信息的保持能力。各個(gè)參數(shù)的統(tǒng)計(jì)值見(jiàn)表4。

圖6 GIHS方法

圖7 Brovey方法

圖8 本文方法
分析得出,在光譜保持性方面,由于GIHS方法加入了近紅外波段,使之與多光譜影像相關(guān)性增強(qiáng),光譜保持效果明顯優(yōu)于FIHS。 Brovey方法和本文方法光譜性較好,綠色植被還原度較高,特別是本文方法,由于單獨(dú)對(duì)綠色植被進(jìn)行了回歸,找出了合適的回歸系數(shù),因此失真非常小。但是兩者也都存在著同樣的缺陷,藍(lán)色建筑方面顏色都出現(xiàn)了不同的加深。在清晰度方面略有下降,也驗(yàn)證了我們目視得到的結(jié)果,GIHS在稍微降低清晰度的同時(shí)大大提高了光譜保真度。對(duì)于Brovey方法,從數(shù)據(jù)上看顏色保持方面優(yōu)于GIHS方法,但是清晰度下降太快。本文方法由于采用分類融合法,在光譜保真度方面優(yōu)于其他方法,清晰度遠(yuǎn)遠(yuǎn)高于Brovey方法,接近GIHS方法。
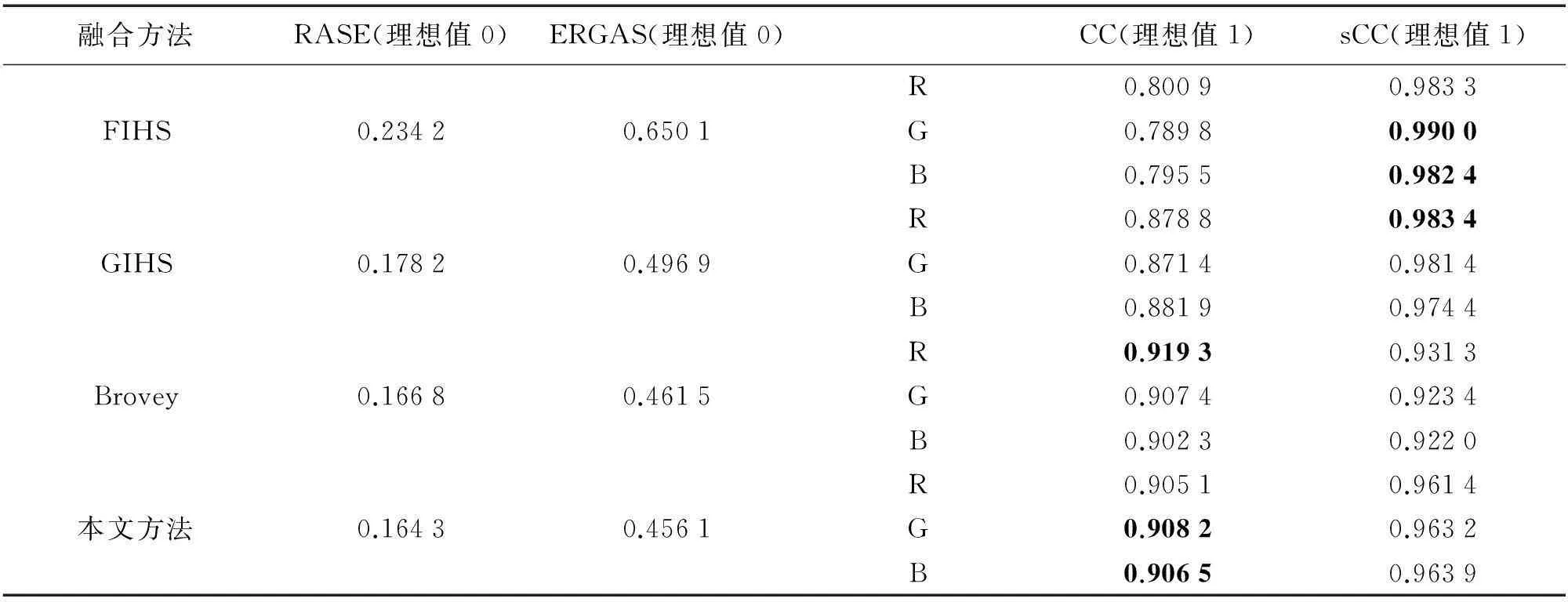
表4 圖像融合評(píng)價(jià)參數(shù)統(tǒng)計(jì)
六、結(jié)束語(yǔ)
本文提出了一種適合資源三號(hào)衛(wèi)星影像的融合新方法,將影像分為綠地和非綠地,采取分類回歸的方法擬合低分辨率全色圖像,可以很好地保持綠色植被的光譜特性。與其他幾種方法相比,在保證清晰度的同時(shí),光譜信息失真明顯減少。光譜保持性和清晰度為判別圖像的兩個(gè)標(biāo)準(zhǔn),而這兩個(gè)指標(biāo)又相互對(duì)立成一種病態(tài)關(guān)系。以后的研究方向?qū)⒅饕性谌绾魏侠淼貥?gòu)造出低分辨全色影像,對(duì)線性回歸模型的優(yōu)化、利用多種數(shù)學(xué)工具解決優(yōu)化方程將成為研究的熱點(diǎn)。
參考文獻(xiàn):
[1]LI D R. China’s First Civilian Three-line-array Stereo Mapping Satellite: ZY-3[J]. Acta Geodaetica et Cartographica Sinica, 2012, 41(3): 317-322.
[2]ZHANG Y. Understanding Image Fusion[J]. Photogrammetric Engineering and Remote Sensing, 2004, 70(6): 657-661.
[3]TU T M, HUANG P S, HUNG C L, et al. A Fast Intensity-Hue-Saturation Fusion Technique with Spectral Adjustment for IKONOS Imagery[J]. IEEE Geoscience and Remote Sensing Letters, 2004, 1(4): 309-312.
[4]DOU W,CHEN Y H,LI X B,et al. A General Framework for Component Substitution Image Fusion:An Implementation Using the Fast Image Fusion Method [J]. Computers and Geosciences,2007,33(2):219-228.
[5]?VAB A, O?TIR K. High-Resolution Image Fusion[J]. Photogrammetric Engineering & Remote Sensing, 2006, 72(5): 565-572.
[6]CHU H, CHEN H G,ZHU W L. A New Remote Sensing Image Fusion Algorithm in the Decimated Wavelet Domain [J]. Opto-Electronic Engineering, 2009, 36(2): 91-95.
[7]王忠武,趙忠明,劉順喜. IKONOS 圖像的線性回歸波段擬合融合方法 [J]. 遙感學(xué)報(bào),2009,14(1):43-54.
[8]竇聞,陳云浩. 計(jì)入波段間相關(guān)性的高通調(diào)制圖像融合方法 [J]. 紅外與毫米波學(xué)報(bào),2010,29(2):140-144.
[9]BOGGIONE G A, PIRES E G, SANTOS P A, et al. Simulation of a Panchromatic Band by Spectral Combination of Multispectral ETM+ Bands[C] ∥Proc. ISRSE.Waikoloa,Hawaii,USA:[s.n.], 2003:321-324.
[10]DOU W, CHEN Y H, HE H M. Theoretical Framework of Optical Remotely Sensed Image Fusion [J]. Acta Geodaetica et Cartographica Sinica, 2009, 38(2): 131-137.
[11]徐涵秋. 基于 SFIM 算法的融合影像分類研究 [J]. 武漢大學(xué)學(xué)報(bào):信息科學(xué)版,2004,29(10):920-923.
[12]AIAZZI B, BARONTI S, LOTTI F, et al.A Comparison between Global and Context-Adaptive Pansharpening of Multispectral Images [J]. IEEE Geoscience and Remote Sensing Letters, 2009, 6(2): 302-306.
引文格式: 黃先德,周群,王興. 資源三號(hào)衛(wèi)星全色與多光譜影像融合方法[J].測(cè)繪通報(bào),2015(1):109-114.DOI:10.13474/j.cnki.11-2246.2015.0023
作者簡(jiǎn)介:黃先德(1989—),男,碩士生,主要研究方向?yàn)檫b感與影像融合與分類。E-mail: hxdlwp-0 01@163.com
收稿日期:2014-07-15
中圖分類號(hào):P236
文獻(xiàn)標(biāo)識(shí)碼:B
文章編號(hào):0494-0911(2015)01-0109-06
猜你喜歡
石油瀝青(2021年4期)2021-10-14 08:50:44
數(shù)學(xué)小靈通(1-2年級(jí))(2021年4期)2021-06-09 06:25:56
大眾健康(2021年6期)2021-06-08 19:30:06
世界科學(xué)技術(shù)-中醫(yī)藥現(xiàn)代化(2021年10期)2021-03-02 05:52:06
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年4期)2019-05-20 10:06:32
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(jí)(2017年9期)2017-10-13 22:27:46
少兒科學(xué)周刊·少年版(2015年3期)2015-07-07 21:00:00
中國(guó)教育技術(shù)裝備(2015年19期)2015-03-01 02:43:07
中國(guó)工程咨詢(2015年2期)2015-02-14 02:59:26
